闭合导线(顺时针编号,输入右内角)坐标计算表(范本)(excel程序)
- 格式:xls
- 大小:28.00 KB
- 文档页数:2
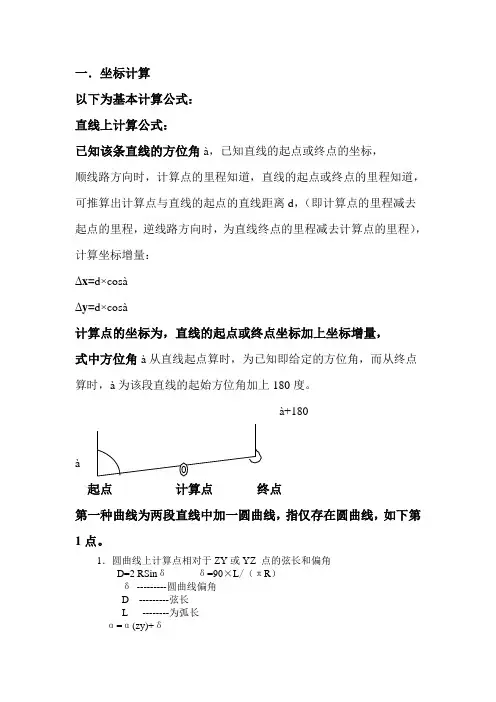
一.坐标计算以下为基本计算公式:直线上计算公式:已知该条直线的方位角à,已知直线的起点或终点的坐标,顺线路方向时,计算点的里程知道,直线的起点或终点的里程知道,可推算出计算点与直线的起点的直线距离d,(即计算点的里程减去起点的里程,逆线路方向时,为直线终点的里程减去计算点的里程),计算坐标增量:∆x=d×cosà∆y=d×cosà计算点的坐标为,直线的起点或终点坐标加上坐标增量,式中方位角à从直线起点算时,为已知即给定的方位角,而从终点算时,à为该段直线的起始方位角加上180度。
à+180à起点计算点终点第一种曲线为两段直线中加一圆曲线,指仅存在圆曲线,如下第1点。
1.圆曲线上计算点相对于ZY或YZ 点的弦长和偏角D=2 RSinδδ=90×L/(πR)δ---------圆曲线偏角D ---------弦长L --------为弧长α=α(zy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
α=α(yz)-δα------------为计算点的方位角,此α为逆着线路方向计算时。
α(zy)、α(yz)---------为圆曲线的起始方位角。
一般为已知。
计算点相对与直圆点或圆直点的坐标增量:△x=D*COSα△y=D*SINα坐标增量计算完毕后,要算某一点的坐标,用直圆点或圆直点的坐标加上计算点与直圆点或圆直点的坐标增量,即为计算点的坐标。
缓和曲线同理。
第二种曲线为两段直线中始端加一缓和曲线,末端加一缓和曲线,两段缓和曲线中加一圆曲线,如下第2点。
2.缓和曲线上计算点相对于HY或YH点的弦长和偏角δ=L²/6RL0X1=L-(L^5/40R²L0²)Y1=L³/6RL0D=√(X1²+Y1²)α=α(hy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。

1.做一个手表。
打开excel并制作表格,如图所示。
2.添加已知数据。
在表中添加点号和已知点坐标。
3.添加观察数据。
将此观测数据添加到表格中-距离和角度。
注意:添加角度时,请确保在度,分钟和秒之间使用空格。
4.将观察角“度秒”转换为“度”数。
在表格中输入:= int(左(b6,3))+ int(中(b6,4,3))/ 60 + int(右(b6,2))/ 3600可以获得转换值。
5.将鼠标移到空格的右下角,直到出现一个实心的十字。
按下鼠标并下拉。
完成所有观察角的转换。
6.计算起始方位角。
根据两个已知点计算两个点的方位角。
公式如下:=等级((PI ()*(1-符号(m6-m4)/ 2)-atan((l6-l4)/(m6-m4)))。
7.计算观测侧的方位角。
根据观测左角的方位角计算公式:起始方位角-180度+观测左角。
如图所示。
应该注意的是,结果为负且大于360度,因此如果使用函数进行判断。
公式:=如果((e5-180 + C6)<0,e5-180 + C6 + 360,如果((e5-180 + C6)> = 360,e5-180 + c6-360,e5-180 + C6))。
下拉-所有方位角均可用。
8.在计算结束时就知道了方位角。
参考步骤6,可以获得两个已知点的设计方位角。
9.计算闭合方位角的闭合误差。
闭合误差=导体设计方位角末端两个已知点的测量方位角。
如图所示。
检查关闭错误是否符合规格要求。
10.方位角闭合误差的分布。
误差分布原理:由于测量精度相等,因此误差是反符号,它均匀分布在每个观察角上。
用全站仪测量闭合导线的步骤:1.测量每个角度和距离。
2.通过内部计算来计算闭合误差,然后,如果满足公差,则根据内角数分配反符号。
3.计算校正后的方位角。
4.坐标增量计算。
5.获取每个点的坐标。
闭合导线计算表
你问这个问题感觉像是在学校考老师布置闭合导线作业,所以我就说一下具体要做的首先我说一下什么是闭合导线,就是从一个已知点进过一段距离后回到这个已知点(想简单点就是以这个点在实地画一个不管是方形还是圆形,最后头尾相连回到这个点)具体简单步骤,你会有一个已知点,全站仪在这个已知点上架站,然后输入你所知道的坐标,我们假设有4个点,分别为abcd,你从a点架站,输入坐标测回法观测方法1.安置仪器:在a点安置仪器,b、d设置目标2.盘左(正镜)观测瞄b,读数b左=0°01'10",记入测回法观测手簿顺时针转动照准部,瞄d,读数d左=147°12'30",记入测回法观测手簿计算上半测回的角值β左=d左- b左=147°11'20"为上半测回3.倒转望远镜,盘右(倒镜)观测瞄B,读数d右=327°12'55",记入测回法观测手簿逆时针转动照准部,瞄b,读数b右=180°01'50",记入测回法观测手簿计算下半测回角值β右= b右- d右=147°11'05"为下半测回上、下半测回,合称一测回4.计算一测回的角值β=(β左+β右)/2=147度11分13秒[数字只是举例,一般来说看b点就直接置零最好]角度测完算完了以后,在bd两点架棱镜,用测距观测出距离,然后记录。
最后按照这个方法,在a点测bd,在b点测ac,在c点测bd,在d点测ac,形成闭合。
外业完了最后就是内业计算了计算就不细说了,给你一张我在学校时导线测量的表,你看下。
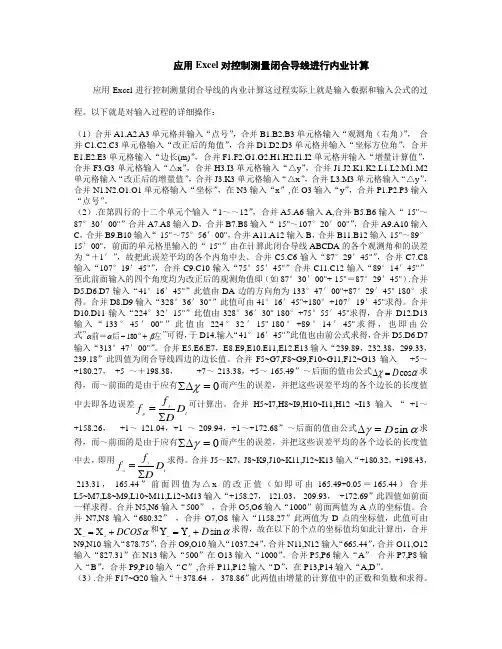
应用Excel 对控制测量闭合导线进行内业计算应用Excel 进行控制测量闭合导线的内业计算这过程实际上就是输入数据和输入公式的过程。
以下就是对输入过程的详细操作:(1)合并A1.A2.A3单元格并输入“点号”,合并B1.B2.B3单元格输入“观测角(右角)”, 合并C1.C2.C3单元格输入“改正后的角值”,合并D1.D2.D3单元格并输入“坐标方位角”,合并E1.E2.E3单元格输入“边长(m)”,合并F1.F2.G1.G2.H1.H2.I1.I2单元格并输入“增量计算值”,合并F3.G3单元格输入“△x ”,合并H3.I3单元格输入“△y ”,合并J1.J2.K1.K2.L1.L2.M1.M2单元格输入“改正后的增量值”,合并J3.K3单元格输入“△x ”,合并L3.M3单元格输入“△y ”,合并N1.N2.O1.O1单元格输入“坐标”,在N3输入“x ”,在O3输入“y ”,合并P1.P2.P3输入“点号”。
(2).在第四行的十二个单元个输入“1~~12”,合并A5.A6输入A,合并B5.B6输入“-15"~87°30′00"”合并A7.A8输入D ,合并B7.B8输入“-15"~107°20′00"”,合并A9.A10输入C ,合并B9.B10输入“-15"~75°56′00",合并A11.A12输入B ,合并B11.B12输入-15"~89°15′00",前面的单元格里输入的“-15"”由在计算此闭合导线ABCDA 的各个观测角和的误差为“+1′”,故把此误差平均的各个内角中去。
合并C5.C6输入“87°29′45"”,合并C7.C8输入“107°19′45"”,合并C9.C10输入“75°55′45"”合并C11.C12输入“89°14′45"”至此前面输入的四个角度均为改正后的观测角值即(如87°30′00"+-15"=87°29′45").合并D5.D6.D7输入“41°16′45"”此值由DA 边的方向角为133°47′00"+87°29′45"-180°求得。
说明:1.角度值输入还可以改为“度.分秒”即六十进制格式,此时在C列和B列求和的单元中将函数Du名称改为Deg(有关函数使用,请查看Excel版函数示例) 或者将六十进制数据用辅助菜单的六十进制转十进制功能转为十进制,之后再用“度转度分秒°′″”转为带符号的角度值
2.当系统设置的误差判断标准不满足现行施工标准时,可更改对应单元的计算公式,使其达到判断要求
3.单元中的函数PinCha1和PingCha2为平差专用函数,表格生成时自动填充,在此不做使用说明
4.当前表格受无密码保护,是为了防止初次使用时单元被修改,导致结果不准确,可直接取消当前表格保护。
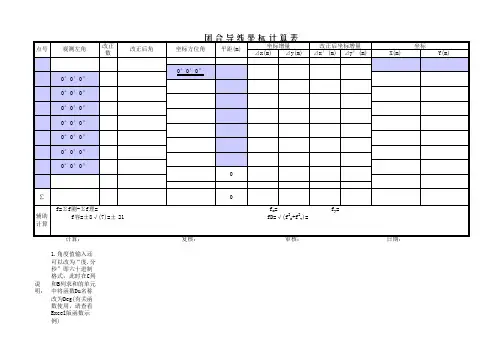
闭合导线(顺时针编号,输入右内角)坐标计算点号°′″观测右角(°)角度改正数(″)改正后的角(°)坐标方位角(°)距离(m)
起点D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
和
已知α1=
已知边数n=角度闭合差('')=导线全长闭合差(m)=
角度闭合差限差(″)=导线全长相对闭合差=
使用说明:
1、使用此程序时,要将闭合环导线点进行“顺时针编号”,输入水平角时,要输入右角且为
2、使用时,先将此页复制,再在复制页上进行修改——先将“蓝色”字体项删除,再按实际
3、当导线点较多或较少时,按实际点数插入或删除行数。
并注意检查计算公式是否正确。
4、“蓝色”字体表示计算时,需要输入的项目。
5、该表中第1个点为已知坐标点,“α1”为该已知点至下一导线点的坐标方位角。
“已知边数n”为闭
6、该表中各点号所对应的“角度”、“坐标”为该点的夹角和坐标,各点号所对应的“方位
7、此程序为图根级导线的计算程序,其他等级导线的计算,其“角度闭合差限差”计算公式及“导线全
8、制作:王劲松 2004-06-15
ΔX(m)ΔY(m)改正后ΔX(m)改正后ΔY(m)X(m)Y(m) #DIV/0!
位角。
“已知边数n”为闭合导线的边数。
角且为内角。
限差”计算公式及“导线全长相对闭合差”数值要修改。
按实际数据进行填写。
确。
“方位角”、“距离”为该点至下一点的方位角及平距。
右内角)坐标计算表(范本)。