一个匹配滤波器的设计
- 格式:pdf
- 大小:329.81 KB
- 文档页数:8
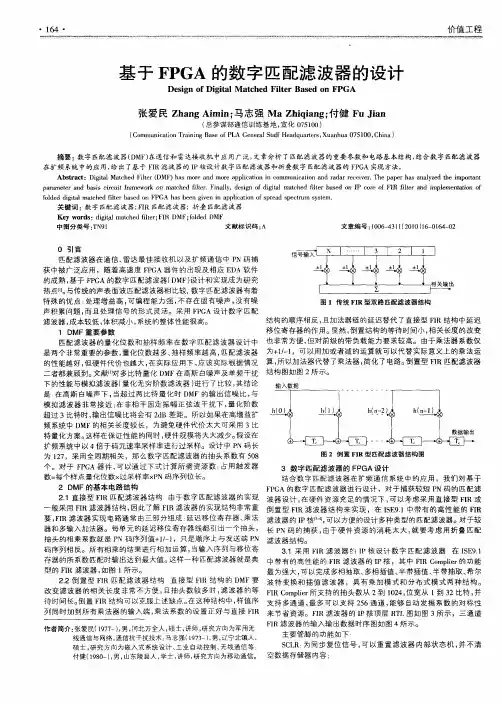
匹配滤波器的设计摘要:在数字通信系统中,滤波器是其中重要部件之一, 滤波器特性的选择直接影响数字信号的恢复。
在数字信号接收中,滤波器的作用有两个方面:使滤波器输出有用信号成分尽可能强;抑制信号带外噪声,使滤波器输出噪声成分尽可能小,减小噪声对信号判决的影响。
通信系统的误码率与输出的信噪比有关,接收端输出信噪比越大,则系统的误码率越小。
因此,如果在每次判决前,输出的信噪比都是最大的,则该系统一定是误码率最小的系统。
遵从这种考虑原则,,我们可以通过simulink 对匹配滤波器进行模拟仿真。
关键字:匹配滤波器 simulink 模拟 信噪比1 设计任务1 当输入幅度为1码元Ts 矩形脉冲时,通过匹配滤波器,观察输出波形,并给出结论。
2对接受原理进行分析。
2 分析原理假设线性滤波器的输入端是信号与噪声的叠加)()()(t n t x t s +=,且假设噪声)(t n 是白噪声,其功率谱密度2)(0N f P n =,信号的频谱为)(f X 。
问题:设计一个滤波器使输出端的信噪比在某时刻0t 达到最大。
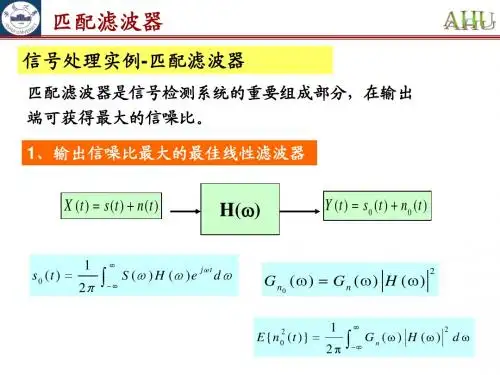
假设该滤波器的系统响应函数为)(f H ,系统冲击响应为)(t h ,则 输出信号)()()(0t n t s t y O += 其中,⎰∞∞--=τττd t h x t s )()()(0,)()()(f H f X f S o =⎰∞∞-=dfe f H f X t s ft j o π2)()()(所以在0t 时刻,信号的功率为200|)(|t s输出噪声的功率谱密度20|)(|2)(f H N f P o n =输出噪声平均功率为⎰∞∞-=df f H N Pn 20|)(|2所以0t 时刻输出的信噪比为:⎰⎰∞∞-∞∞-==df f H N df e f H f X Pn t s r ft j 20222000|)(|2|)()(||)(|0π根据Schwarts 不等式,⎰⎰⎰∞∞-∞∞-∞∞-≤dff Y df f X df f Y f X 222|)(||)(||)()(|可以得到02022|)(|N E N df f X r s =≤⎰∞∞-当02*)()(ft j e f KX f H π-=时等式成立。
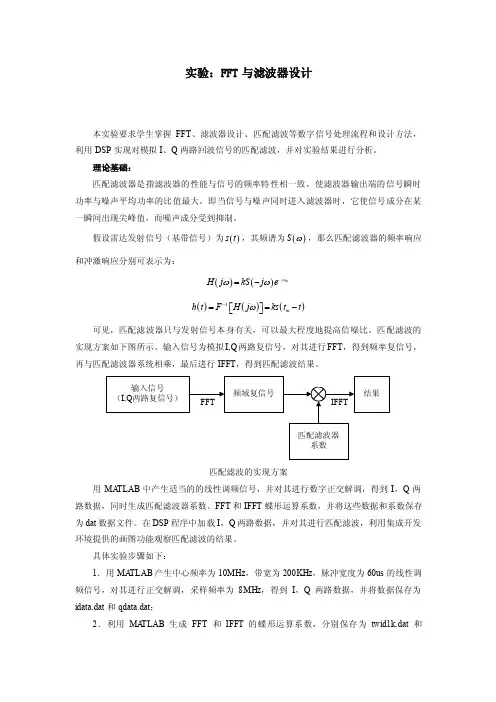
实验:FFT 与滤波器设计本实验要求学生掌握FFT 、滤波器设计、匹配滤波等数字信号处理流程和设计方法,利用DSP 实现对模拟I 、Q 两路回波信号的匹配滤波,并对实验结果进行分析。
理论基础:匹配滤波器是指滤波器的性能与信号的频率特性相一致,使滤波器输出端的信号瞬时功率与噪声平均功率的比值最大。
即当信号与噪声同时进入滤波器时,它使信号成分在某一瞬间出现尖峰值,而噪声成分受到抑制。
假设雷达发射信号(基带信号)为()s t ,其频谱为()S ω,那么匹配滤波器的频率响应和冲激响应分别可表示为:()()j m H j kS j e ωωω-=-()()()1m h t F H j ks t t ω-==-⎡⎤⎣⎦可见,匹配滤波器只与发射信号本身有关,可以最大程度地提高信噪比。
匹配滤波的实现方案如下图所示。
输入信号为模拟I,Q 两路复信号,对其进行FFT ,得到频率复信号,再与匹配滤波器系统相乘,最后进行IFFT ,得到匹配滤波结果。
匹配滤波的实现方案用MA TLAB 中产生适当的的线性调频信号,并对其进行数字正交解调,得到I ,Q 两路数据,同时生成匹配滤波器系数、FFT 和IFFT 蝶形运算系数,并将这些数据和系数保存为dat 数据文件。
在DSP 程序中加载I ,Q 两路数据,并对其进行匹配滤波,利用集成开发环境提供的画图功能观察匹配滤波的结果。
具体实验步骤如下:1.用MA TLAB 产生中心频率为10MHz ,带宽为200KHz ,脉冲宽度为60us 的线性调频信号,对其进行正交解调,采样频率为8MHz ,得到I ,Q 两路数据,并将数据保存为idata.dat 和qdata.dat ;2.利用MA TLAB 生成FFT 和IFFT 的蝶形运算系数,分别保存为twid1k.dat 和itwid1k.dat;3.由I,Q两路数据生成复信号,在MA TLAB中对其进行Fourier变换,再进行共轭和数据反转,得到匹配滤波器系数并保存为LFM_para.dat;4.在MA TLAB中对上述信号进行匹配滤波,并对结果进行分析;参考程序:首先,利用MA TLAB实现对中频信号的正交解调和匹配滤波器,参考程序如下:clear all;close all;fs=8000000;t0=0.00006;t2=0:1/fs:t0-1/fs;f0=9900000;f1=200000;k=3300000000;N=1024;x1=cos(2*pi*(f0*t2+k*t2.^2));x=[x1 zeros(1,N-length(t2))];figure(1); plot(x);for i=1:length(x)/2y1(i)=x(2*i-1)*(-1)^(i);y2(i)=x(2*i)*(-1)^(i);endfor k=3:i-4z1(k)=9*(y1(k-1)+y1(k+1))/16-(y1(k-2)+y1(k+2))/16;z2(k)=9*(y2(k-1)+y2(k+1))/16-(y2(k-2)+y2(k+2))/16;endfigure(2)x1=1:length(y1);y=1:length(z1);subplot(2,1,1),plot(x1,y1,'r-',x1,y2,'b-');subplot(2,1,2),plot(y,z1,'r-',y,z2,'b-');save idata.dat z1 -ascii;save qdata.dat z2 -ascii;j=sqrt(-1);z=z1+j*z2;fz=fft(z,N);figure(3); plot(real(fz))m=z(1:480); %z为IQ两路信号组成的复信号,480=60us ×8Mh=fliplr(conj(m));H=fft(h,N);fid=fopen('LFM_para.dat','wt');for k=1:Nfprintf(fid,'%e\n%e\n',real(H(k)),imag(H(k)));endfclose(fid);a=H.*fz;figure(4); plot(real(a)); b=ifft(a,N);figure(5); plot(abs(b));。
匹配滤波器设计仿真匹配滤波器是一种用于信号处理和通信系统中的重要滤波器设计。
它可以用于信号匹配、频率选择和滤波等应用。
在设计匹配滤波器之前,我们需要了解滤波器设计的基本原理和方法。
本文将介绍匹配滤波器的设计过程,并通过仿真实例展示其性能。
首先,我们需要确定滤波器的频率响应。
频率响应是描述滤波器在不同频率下输出的响应的函数。
常见的频率响应包括低通、高通、带通、带阻等。
根据系统要求,选择适当的频率响应。
其次,选择合适的滤波器类型。
常见的滤波器类型有FIR滤波器和IIR滤波器。
FIR滤波器是一种无反馈滤波器,采用有限长冲激响应的方式实现滤波功能。
IIR滤波器是一种有反馈滤波器,采用递归方式实现滤波功能。
根据需求,选择适合的滤波器类型。
然后,选择适当的滤波器参数。
滤波器参数包括滤波器阶数、滤波器系数等。
滤波器阶数反映了滤波器的复杂程度,一般情况下,滤波器的阶数越高,性能越好,但计算和实现的复杂度也越高。
滤波器系数是滤波器的输出与输入之间的系数关系。
通过调整滤波器参数,可以实现滤波器设计的灵活性和性能优化。
最后,进行匹配滤波器的仿真。
在现代工具和平台的支持下,匹配滤波器的仿真已经变得非常方便和高效。
可以使用MATLAB、Simulink、LabVIEW等软件工具进行匹配滤波器的仿真。
通过仿真可以评估滤波器的性能、验证设计的正确性和优化设计参数。
下面我们通过一个仿真实例来演示匹配滤波器的设计和仿真过程。
假设我们要设计一个低通滤波器,频率响应为0-1kHz,滤波器类型为FIR滤波器,滤波器阶数为10,采样率为10kHz。
首先,确定滤波器的频率响应。
由于是低通滤波器,我们希望在1kHz以下的频率范围内的信号通过,而在1kHz以上的频率范围内的信号被截止。
可以选择一个合适的频率响应函数,例如一阶巴特沃斯低通滤波器函数。
然后,选择滤波器类型。
这里选择使用FIR滤波器,因为FIR滤波器具有线性和时移不变的特点,适用于许多实际应用。

匹配滤波器的基本原理
匹配滤波器是一种常用于信号处理和图像处理领域的重要工具,它利用已知信号的特定特征来寻找目标信号中的相似部分。
匹配滤波器在目标检测、模式识别、信号增强等方面具有广泛的应用。
匹配滤波器的基本原理是通过比较输入信号与参考信号之间的相似度来实现信号的匹配和检测。
在匹配滤波器的设计中,首先需要确定所需匹配的特征或模式,并将其表示为一个滤波器的形式。
这个滤波器也称为模板或核。
匹配滤波器的计算过程包括两个步骤:首先,将输入信号与滤波器进行卷积运算,得到一个相似度图像;其次,通过比较相似度图像中的各个像素值,可以确定输入信号中与滤波器匹配的位置。
在匹配滤波器的设计过程中,关键在于选择合适的滤波器模板。
通常情况下,模板的选择依赖于目标信号的特征以及应用的具体要求。
较好的模板设计可以提高匹配滤波器的性能和准确性。
匹配滤波器有多种类型,其中最常见的包括平均匹配滤波器、相关匹配滤波器和最大似然匹配滤波器等。
每种类型的匹配滤波器都有其特定的适用场景和优势,需要根据实际情况选择合适的类型。
在实际应用中,匹配滤波器可以用于目标跟踪、图像识别、模式匹配等领域。
例如,在目标跟踪中,可以通过匹配滤波器来识别目标在连续帧中的位置,从而实现目标的跟踪和定位。
总的来说,匹配滤波器作为一种强大的信号处理工具,具有广泛的应用前景和重要的研究意义。
通过不断的优化和改进,匹配滤波器将在各个领域发挥越来越重要的作用,为信号处理和图像处理领域的发展提供有力支持。
1。
匹配滤波器的研究与设计匹配滤波器是一种用于信号处理的滤波器,其设计目的是使得滤波后的信号与所需信号的相关性最大化。
匹配滤波器在许多领域中广泛应用,例如通信系统、雷达系统、图像处理等。
其基本原理是通过与所需信号进行相关性运算,将相关性较高的信号放大,从而提高信噪比和信号质量。
匹配滤波器的设计过程一般包括三个主要步骤:信号模型的建立、滤波器的设计和性能评估。
首先,需要对所需信号进行建模,这可以通过数学模型或实测数据进行。
信号模型的建立是设计匹配滤波器的基础,它决定了滤波器的结构和参数设置。
接下来是滤波器的设计。
匹配滤波器可以通过时域方法或频域方法进行设计。
时域方法包括传统的无限脉冲响应(IIR)滤波器和有限脉冲响应(FIR)滤波器。
IIR滤波器具有无限冲激响应,可以实现更好的频率特性,但对于实时应用可能出现不稳定性的问题。
而FIR滤波器只采用有限数量的冲激响应,稳定性较好,但因为没有反馈路径,相对于IIR滤波器而言可能需要更长的滤波器长度。
频域方法包括离散傅立叶变换(DFT)、快速傅立叶变换(FFT)等。
这些方法可以将滤波器设计问题转化为频域操作,简化了设计过程。
在频域中,可以通过选择合适的窗函数来控制滤波器的频率响应特性。
常用的窗函数有矩形窗、汉宁窗、汉明窗等。
不同窗函数的选择将影响滤波器的主瓣宽度和副瓣衰减。
最后是对滤波器性能的评估。
性能评估是确认滤波器设计是否满足要求的重要步骤。
常用的评估指标包括滤波器的幅频响应、相频响应、群延迟、零点和极点位置等。
这些指标可以通过数学分析、实验测量或仿真模拟得到。
如果设计的滤波器性能不满足要求,还可以通过参数调整、结构优化等方法进行改进。
匹配滤波器的研究与设计是一个涉及信号处理、数字滤波和数学建模等多个学科的综合性问题。
在实际应用中,研究人员需要根据不同的应用场景和需求来选择适当的滤波器设计方法和算法。
随着科技的发展和需求的不断变化,匹配滤波器设计也在不断创新和改进。
匹配滤波器的设计班级:通信091学号:0930334105姓名:顾浙杰1、匹配滤波器的设计要点:(1)接收端事先明确知道,发送信号分别以何种形状的波形来表示发送的1、0码符号或多元符号;(2)接收端针对各符号波形,分别提供与其相适应的接受电路,并且并且各唯一对应适配的一种传输的信号波形,能使输出信噪比达到最大,判决风险最小; (3)对未知相位的已调波,采用附有包络检测的匹配滤波器接收方式。
2、匹配滤波器的传递特性设计:设接收滤波器的传输函数为H(f),冲激响应为h(t),滤波器输入码元s(t)的持续时间为Ts ,信号和噪声之和r(t)为式中,s(t) 为信号码元,n(t) 为 高斯白噪声。
并设信号码元s(t)的频谱密度函数为S(f),噪声n(t)的双边功率谱密度为P n (f) = n 0/2,n 0为噪声单边功率谱密度。
由于假定滤波器是线性的,根据线性电路叠加定理,当滤波器输入电压r(t)中信号和噪声两部分时,滤波器的输出电压y(t)中也包含相应的输出信号和输出噪声两部分,即 y(t)= s 0(t)+ n 0(t)这时的输出噪声功率N o 等于在抽样时刻t 0上,输出信号瞬时功率与噪声平均功率之比为为了求出r 0的最大值,我们利用施瓦兹不等式求 r 0的最大值()()()0sr t s t n t t T =+≤≤2()*()()()()()()()()==0=n /2由于:为输出功率谱密度,为输入功率谱密度,Y R R Y R R P f H f H f P f H f P f P f P f P f ⎰⎰∞∞-∞∞-=⋅=df f H n df n f H N o 2002)(22)(02220020()()()()2j ft o oH f S f e df s t r n N H f df π∞-∞∞-∞==⎰⎰⎰⎰⎰∞∞-∞∞-∞∞-≤dx x f dx x f dx x f x f 2221221)()()()(等号成立的条件是(k 为任意常数)若在白噪声干扰的背景下,按上式设计的线性滤波器,将能在给定时刻t 0上获得最大输出信噪比(2E/n 0)。
匹配滤波器的设计准则是实现信号处理中的最优检测。
其基本思想是使滤波器的输出信噪比在给定时刻达到最大,从而使得有用信号得到加强,而噪声得到抑制。
匹配滤波器是一种最佳线性滤波器,能够最大化信噪比,从而提高信号检测的可靠性。
在信号处理中,匹配滤波器被广泛应用于雷达、声呐、通信和图像处理等领域。
它的主要优点是能够提供最高的输出信噪比,从而实现信号的最佳检测。
此外,匹配滤波器还能够提供最小的均方误差,从而提高信号处理的准确性。
为了设计一个匹配滤波器,我们需要了解输入信号的统计特性,例如信号的功率谱密度和噪声的功率谱密度。
然后,根据这些统计特性,我们可以使用不同的优化算法来设计匹配滤波器。
常用的优化算法包括最小均方误差算法、最大信噪比算法和最小方差无偏估计算法等。
总之,匹配滤波器的设计准则是实现信号处理中的最优检测,能够提供最高的输出信噪比和最小的均方误差。
在设计匹配滤波器时,我们需要了解输入信号的统计特性,并选择合适的优化算法来实现最佳的信号处理效果。

2010 年秋季学期研究生课程考核(阅读报告、研究报告)考核科目:科学技术哲学学生所在院(系):电气工程及自动化学院学生所在学科:仪器科学与技术学生姓名:李海洋学号:10S001049学生类别:工学硕士考核结果阅卷人匹配滤波器的设计与验证实验报告实验目的:1、了解匹配滤波器的基本原理;2、掌握如何设计一个传输系统的匹配滤波器;3、深刻认识匹配滤波器的一些实际应用;实验原理:设线性滤波器输入端输入的信号与噪声的混合波形为并假定噪声为白噪声,其功率谱密度,而信号的频谱函数为,即。
我们要求线性滤波器在某时刻上有最大的信号瞬时功率与噪声平均功率的比值。
现在就来确定在上述最大输出信噪比准则下的最佳线性滤波器的传输特性。
这就是最佳线性滤波器的传输特性。
式中,即为的复共轭。
在白噪声干扰的背景下,按式(8.7-3)设计的线性滤波器,将能在给定时刻上获得最大的输出信噪比。
这种滤波器就是最大信噪比意义下的最佳线性滤波器。
由于它的传输特性与信号频谱的复共轭相一致(除相乘因子外),故又称其为匹配滤波器。
匹配滤波器的传输特性,当然还可用它的冲激响应来表示,这时有:由此可见,匹配滤波器的冲激响应便是信号的镜像信号在时间上再平移。
要求当时有为了获得物理可实现的匹配滤波器,。
为了满足这个条件,就要满足:这个条件表明,物理可实现的匹配滤波器,其输入端的信号必须在它输出最大信噪比的时刻之前消失(等于零)。
这就是说,若输入信号在瞬间消失,则只有当时滤波器才是物理可实现的。
一般总是希望尽量小些,故通常选择。
顺便指出,当我们专门关心匹配滤波器的输出信号波形时,它可表示为由此可见,匹配滤波器的输出信号波形式输入信号的自相关函数的K倍。
至于常数,实际上它是可以任意选取的,因为与无关。
因此,在分析问题时,可令。
实验过程1.产生1000点的白噪声nt,所用命令nt=randn(1,1000)(如图一)2.产生1000点的有用信号st,st的角频率是8000pi,相位是时间的函数0.5*k*t.*t,幅度是1的余弦函数。
用simulink设计一个匹配滤波器1、概述1.1匹配滤波器的定义输出信噪比最大的线性滤波器称为匹配滤波器。
匹配滤波器是一种非常重要的滤波器,广泛应用与通信、雷达等系统中。
从幅频特性来看,匹配滤波器和输入信号的幅频特性完全一样。
这也就是说,在信号越强的频率点,滤波器的放大倍数也越大;在信号越弱的频率点,滤波器的放大倍数也越小。
这就是信号处理中的“马太效应”。
也就是说,匹配滤波器是让信号尽可能通过,而不管噪声的特性。
因为匹配滤波器的一个前提是白噪声,也即是噪声的功率谱是平坦的,在各个频率点都一样。
因此,这种情况下,让信号尽可能通过,实际上也隐含着尽量减少噪声的通过。
从相频特性上看,匹配滤波器的相频特性和输入信号正好完全相反。
这样,通过匹配滤波器后,信号的相位为0,正好能实现信号时域上的相干叠加。
而噪声的相位是随机的,只能实现非相干叠加。
这样在时域上保证了输出信噪比的最大。
实际上,在信号与系统的幅频特性与相频特性中,幅频特性更多地表征了频率特性,而相频特性更多地表征了时间特性。
匹配滤波器无论是从时域还是从频域,都充分保证了信号尽可能大地通过,噪声尽可能小地通过,因此能获得最大信噪比的输出。
实际上,匹配滤波器由其命名即可知道其鲜明的特点,那就是这个滤波器是匹配输入信号的。
一旦输入信号发生了变化,原来的匹配滤波器就再也不能称为匹配滤波器了。
匹配滤波器的另外一个名字就是相关接收,两者表征的意义是完全一样的。
只是匹配滤波器着重在频域的表述,而相关接收则着重在时域的表述。
关键词:匹配滤波器Matlab simulink 滤波1.2引言匹配滤波其对信号做的两种处理:a.去掉信号相频函数中的任何非线性部分,因而在某一时刻可使信号中的所有频率分量都在输出端同相叠加而形成峰值。
b.是按照信号的幅频特性对输入波形进行加权,一边最有效的接收信号能量而一直干扰的输出功率2、课程设计目的2.1目的a.通过利用matlab simulink,熟悉matlab simulink仿真工具。
数字信号课外作业数字匹配滤波器的设计在数字通信系统中,最常用的准则是最大输出信噪比准则,在此准则下获得的最佳线性滤波器叫做匹配滤波器1.匹配滤波器原理在通信系统中,若接收机输入信噪比相同,所设计的接收机的输出信噪比最大,则能够最佳地判决出有用信号,从而可以得到系统最小误码率,这就是最大输出信噪比准则。
在数字通信系统里,可在接收机内采用一种线性滤波器,当加噪信号通过它时,使其中有用信号加强并使噪声衰减,并在采样时刻使输出信号的瞬时功率与噪声平均功率之比达到最大,这种线性滤波器称为匹配滤波器。
设接收滤波器的传输函数为H(w),滤波器输入为r(t)=s(t)+n(t) ⑴式中,s(t)为输入有用信号,其频谱为S(w);n(t)为高斯白噪声。
由于线性滤波器满足叠加原理,因此滤波器输出为y(t)=s0(t)+n0(t) ⑵式中,s0(t)和n0(t)分别为s(t)和n(t)单独通过此滤波器的输出。
由线性系统最大响应原理,设K为常数,可以导出当接收滤波器满足H R(ω)= K(ω)⑶时,滤波器输出信噪比最大。
即当一个线性相位滤波器传输函数等于输入信号频谱复共轭时,称为匹配滤波器。
2.匹配滤波器设计由无码间干扰(奈奎斯特准则)和最佳接收机原理可以导出,在理想信道的数字通信系统中,若接收和发送滤波器传输函数分别为H R(f)和H T(f),而且有S(f)=H R(f)H T(f) ⑷时,则系统无码间干扰,并可实现最佳接收。
在实用中,发送端输入信号频谱常用升余弦函数S(f)=⑸式中,T为脉冲间隔,0< a≤1为频谱滚降系数,ω=2图为按⑷和(5)式设计并用MATLAB程序实现频率特性为HR(f)和HT(f)的滤波器,其中HR(f)是HT(f)的匹配滤波器。
解:设计符合题意的数字滤波器的最简便方法是采用线性相位FIR滤波器,其幅度特性为|H R(f)|=|H T(f)|=⑹式中,S(f)由(5)式给出。
设hR(f)为滤波器单位脉冲响应,N为奇数是滤波器阶数,按频率响应与脉冲响应的关系有H R(f)=⑺式中,TS为采样间隔,按采样定理,采样频率至少为 fs=2×1/T,为了保证一定的过渡带,选择fs=1/Ts=4*1/T ⑻因此,频谱重叠频率为fs/2=2/T,所以可在△f==为间隔的等间隔频率点上对S(f)进行采样,因此可得H R(m△f)==⑼按照时频关系,hR(n)亦可表达为H R(n)=⑽由于,滤波器为线性相位,要求滤波器单位脉冲响应h R(n)采用(N-1)/2个采样延迟,以保证h R(n)的对称性。
匹配滤波器设计匹配滤波器是一种检测噪声中某个确定信号是否存在的最佳滤波方法。
典型问题:有一个已知的有限时长的确定信号s(t),我们希望从接收信号r(t)中检测它是否出现。
最佳估值的准则:输出信噪比达到最大。
应用:通信、雷达中最佳接收技术。
匹配滤波器模型:y(t)=x(t)*h(t)=s(t)*h(t)+n( t)*h(t)s(t)为已知的有限时长的发射信号,x(t)为接收信号,n(t)是白噪声,我们希望设计滤波器h(t),使输出y(t)有最大值。
这一处理过程如下图所示,可见,在t=t0时刻,信号最大限度地越过背景噪是信号的反转平移形式,如下图:(a)测距离:发射信号s(t):高斯白噪声n(t):接收到的带噪声信号x(t):冲击响应h(t):卷积法结果(b)测速度原理:多普勒效应当波源靠近观察者时,接收信号频率变高;波源远离观察者时,接收信号频率变低。
靠近时频率远离时频率v:波在介质中移动速度V0 :观察者移动速度VS:发射源移动速度实验时,有用发射信号撞到运动目标后,反射回来的信号频率已经变化,此时要想用匹配滤波器将信号检测出来,可以使匹配滤波器的频率变化,f=1:0.1:2.5,当某一个输出有最大值时,此匹配滤波器的频率就是接受信号的频率。
为了编程方便,我就取了三个频率,f=0.5、1、2。
实验结果:一句话总结:测距离:将发射信号以y轴做镜像,然后与接收信号做卷积即可。
测速度:改变匹配滤波器的频率,然后和接收信号卷积,输出峰值最大时匹配滤波器的频率就是所求的。
心得体会:开学时,老师就说这课最后有四个作业,大家做好了可以上台讲,当时我就很心动,就想上去讲一讲。
后来快要结课了,我才把匹配滤波器做了,不过,缺陷很多:1) 匹配滤波器的准则没弄懂2) 实验不完善或不合理(所用的频率太低一一1hz)通过自己去做,发现这个东西也没有想象的那么难,而且这个上台的机会很难得,我很庆幸我得到这个机会,锻炼了我的胆量和培养了我的学术能力,以后有这样的机会,一定要抓住,多锻炼自己。
匹配滤波器的工作原理一、前言匹配滤波器是一种常见的信号处理技术,广泛应用于图像处理、模式识别等领域。
本文将详细介绍匹配滤波器的工作原理。
二、匹配滤波器的定义匹配滤波器是一种线性时不变系统,其输入信号与参考信号进行相关运算后输出结果。
在实际应用中,输入信号通常为待检测的目标图像,参考信号则为已知的目标特征。
三、匹配滤波器的基本原理1. 相关运算相关运算是匹配滤波器中最基本的操作之一。
其定义为两个函数之间的积分:$$R(f,g) = \int_{-\infty}^{\infty} f(x)g(x-t)dt$$其中 $f(x)$ 和 $g(x)$ 分别表示两个函数,$t$ 为时间延迟。
在匹配滤波器中,输入信号 $x(t)$ 与参考信号 $h(t)$ 进行相关运算后得到输出信号 $y(t)$:$$y(t) = \int_{-\infty}^{\infty} x(\tau)h(\tau-t)d\tau$$2. 匹配度匹配度是指输入信号与参考信号之间的相似程度。
在匹配滤波器中,匹配度通常使用相关峰值来表示。
相关峰值表示参考信号与输入信号之间的最大相似程度。
3. 匹配滤波器的设计匹配滤波器的设计主要包括两个方面:参考信号的选择和滤波器的实现。
参考信号的选择通常需要根据具体应用场景进行定制。
在图像处理中,参考信号通常为目标物体的特征模板。
在模式识别中,参考信号则为已知模式。
滤波器的实现方式有多种,包括时域实现和频域实现。
其中时域实现使用卷积运算来实现匹配滤波器,频域实现则通过将输入信号和参考信号同时变换到频域进行处理。
四、匹配滤波器的应用匹配滤波器在图像处理、模式识别等领域有广泛应用。
其中,在目标检测、跟踪等方面有着重要作用。
在目标检测中,匹配滤波器可以通过对目标特征进行建模来实现对目标物体的检测。
在跟踪方面,匹配滤波器可以通过对目标物体进行跟踪来实现对其运动轨迹的追踪。
五、总结本文详细介绍了匹配滤波器的工作原理。