时变参数的状态空间模型
- 格式:ppt
- 大小:1.05 MB
- 文档页数:3
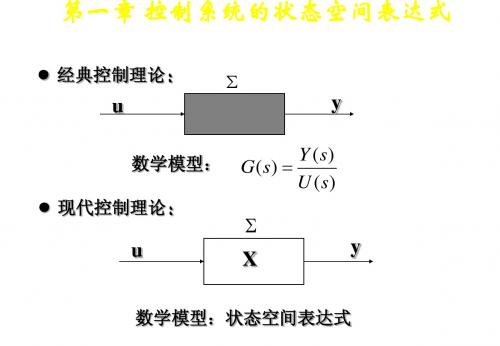


Chapter1控制系统的状态空间模型1.1 状态空间模型在经典控制理论中,采用n 阶微分方程作为对控制系统输入量)(t u 和输出量)(t y 之间的时域描述,或者在零初始条件下,对n 阶微分方程进行Laplace 变换,得到传递函数作为对控制系统的频域描述,“传递函数”建立了系统输入量)]([)(t u L s U =和输出量)]([)(t y L s Y =之间的关系。
传递函数只能描述系统的外部特性,不能完全反映系统内部的动态特征,并且由于只考虑零初始条件,难以反映系统非零初始条件对系统的影响。
现代控制理论是建立在“状态空间”基础上的控制系统分析和设计理论,它用“状态变量”来刻画系统的内部特征,用“一阶微分方程组”来描述系统的动态特性。
系统的状态空间模型描述了系统输入、输出与内部状态之间的关系,揭示了系统内部状态的运动规律,反映了控制系统动态特性的全部信息。
1.1.1 状态空间模型的表示法例1-1(6P 例1.1.1) 如下面RLC (电路)系统。
试以电压u 为输入,以电容上的电压C u 为输出变量,列写其状态空间表达式。
例1-1图 RLC 电路图解:由电路理论可知,他们满足如下关系⎪⎩⎪⎨⎧==++)(d )(d )()()(d )(d t i t t u C t u t u t Ri t t i L C C 经典控制理论:消去变量)(t i ,得到关于)(t u C 的2=n 阶微分方程:)(1)(1d )(d d )(d 22t u LCt u LC t t u L R t t u C C C =++ 对上述方程进行Laplace 变换:)()()2(20202s U s U s s C ωωζ=++得到传递函数:202202)(ωζω++=s s s G ,LC10=ω,L R 2=ζ 现代控制理论:选择⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛)()(21t u t i x x C 流过电容的电流)(t i 和电容上的电压)(t u C 作为2个状态变量,2=n (2个储能元件);1个输入为)(t u ,1=m ;1个输出C u y =,1=r 。



状态方程的参数简介状态方程是描述动态系统行为的数学模型,它通过表示系统的状态和状态变化的方程来描述系统的演化规律。
状态方程的参数是指在状态方程中出现的变量和常数。
这些参数决定了系统的特性和行为,对于系统的分析和控制至关重要。
在本文中,我们将介绍状态方程的基本概念和常见形式,然后详细讨论状态方程的参数,包括变量和常数的定义、物理意义、取值范围以及对系统行为的影响。
状态方程的基本概念状态方程描述了系统的状态随时间的演化规律。
一般来说,状态方程可以写成如下形式:dx/dt = f(x, u, t)其中,x是系统的状态向量,u是系统的输入向量,t是时间,f是状态方程的右侧函数。
状态方程可以是线性或非线性的,具体形式取决于系统的性质和特点。
状态方程的参数包括状态向量x中的变量和常数,以及右侧函数f中的变量和常数。
下面我们将分别讨论这些参数的定义和物理意义。
状态向量的参数状态向量x是描述系统状态的一组变量。
它的具体定义和物理意义取决于系统的性质和特点。
下面是一些常见的状态向量及其参数的例子:•位置向量:描述物体在空间中的位置,参数包括物体在三个坐标轴上的位置变量(例如x、y、z)。
•速度向量:描述物体在空间中的速度,参数包括物体在三个坐标轴上的速度变量(例如v_x、v_y、v_z)。
•电路变量:描述电路中的电流和电压,参数包括电流和电压变量(例如i、v)。
状态向量的参数在状态方程中起到了关键的作用。
它们决定了系统的状态空间的维度和范围,以及状态变化的规律。
不同的参数可以对系统的行为产生不同的影响。
右侧函数的参数右侧函数f描述了状态向量x随时间的变化规律。
它的具体定义和物理意义也取决于系统的性质和特点。
下面是一些常见的右侧函数及其参数的例子:•线性函数:描述线性系统的状态变化规律,参数包括状态向量x、输入向量u和常数矩阵。
•非线性函数:描述非线性系统的状态变化规律,参数包括状态向量x、输入向量u和非线性函数。