opengl 球体顶点坐标
- 格式:docx
- 大小:36.57 KB
- 文档页数:2
opengles 顶点理解摘要:1.简介2.OpenGL ES 顶点概念3.顶点属性4.顶点数组5.顶点缓冲对象6.总结正文:OpenGL ES(OpenGL for Embedded Systems)是一种为嵌入式系统设计的图形编程接口。
在OpenGL ES中,顶点是图形渲染的基本单元,负责描述物体的形状和纹理。
本文将详细介绍OpenGL ES顶点的相关知识。
2.OpenGL ES 顶点概念在OpenGL ES中,顶点(Vertex)是一个抽象的概念,它代表了一个三维空间中的点。
顶点可以是实心的,也可以是空心的,甚至可以是一个平面。
为了更好地表示顶点,我们需要为其定义一些属性。
3.顶点属性顶点属性(Vertex Attribute)是用来描述顶点特征的数据。
在OpenGL ES中,每个顶点可以包含以下属性:- 位置(Position):顶点在三维空间中的坐标。
- 颜色(Color):顶点的颜色,通常用RGBA表示。
- 纹理坐标(Texture Coordinate):顶点在纹理上的坐标。
- 法向量(Normal):顶点所在平面的法向量。
- 其他属性:根据实际需求,还可以定义其他属性,如顶点ID、权重等。
4.顶点数组顶点数组(Vertex Array)是一种数据结构,用于存储顶点属性的数据。
OpenGL ES提供了两种顶点数组:- 顶点数组对象(Vertex Array Object,VAO):是一个高级的顶点数组,可以保存顶点数组的状态,如顶点数组渲染属性等。
- 顶点数组缓冲(Vertex Array Buffer,VAB):是一个低级的顶点数组,用于存储顶点属性数据。
5.顶点缓冲对象顶点缓冲对象(Vertex Buffer Object,VBO)是一种用于存储顶点数据的数据结构。
VBO可以用于存储顶点数组、顶点数组缓冲和其他类型的顶点数据。
通过使用VBO,可以提高渲染性能,并减轻CPU的负担。
OpenGL坐标系统⼀、坐标系统概述本⽂类容见。
直接copy过来留个存档。
OpenGL希望每次顶点着⾊后,我们的可见顶点都为标准化设备坐标(Normalized Device Coordinate,NDC)。
也就是说每个顶点的z,y,z 都应该在−1到1之间,超出这个范围的顶点将是不可见的。
通常情况下我们会⾃⼰设定⼀个坐标范围,之后再在顶点着⾊器中将这些坐标变换为表转化设备坐标。
然后这些标化设备坐标传⼊光栅器(Rasterizer),将它们变换为屏幕上的⼆维坐标和像素。
将坐标变换为标准化设备坐标,接着再转化为屏幕坐标的过程通常是分步进⾏的,也就是类似于流⽔线那样⼦。
在流⽔线中,物体的顶点在最终转化为屏幕坐标之前还会被变换到多个坐标系统(Coordinate System)。
将物体的坐标变换到⼏个过渡坐标系(Intermediate Coordinate System)的优点在于,在这些特定的坐标系统中,⼀些操作或运算更加⽅便和容易,这⼀点很快就会变得很明显。
对我们来说⽐较重要的总共有5个不同的坐标系统局部空间(Local Space,或者称为物体空间(Object Space))世界空间(World Space)观察空间(View Space,或者称为视觉空间(Eye Space))裁剪空间(Clip Space)屏幕空间(Screen Space)这就是⼀个顶点在最终被转化为⽚段之前需要经历的所有不同状态。
为了将坐标从⼀个坐标系变换到另⼀个坐标系,我们需要⽤到⼏个变换矩阵,最重要的⼏个分别是模型(Model)、观察(View)、投影(Projection)三个矩阵。
物体顶点的起始坐标再局部空间(Local Space),这⾥称它为局部坐标(Local Coordinate),它在之后会变成世界坐标(world Coordinate),观测坐标(View Coordinate),裁剪坐标(Clip Coordinate),并最后以屏幕坐标(Screen Corrdinate)的形式结束。
OpenGL学习脚印OpenGL 坐标变换OpenGL学习脚印: OpenGL 坐标变换写在前面本节内容翻译和整理自http://www.songho.ca songho的博客《OpenGL Transformation》内容,以供自己和初学者熟悉OpenGL中坐标变换的整个过程。
通过本节,你可以了解到:OpenGL坐标变换过程理解OpenGL矩阵计算概览几何数据例如顶点位置和法向量在光栅化操作之前,都要通过Vertex Operation 和Primitive Assembly OpenGL流水线操作(在OpenGL pipeline节描述)。
OpenGL 顶点变换Object Coordinates(对象坐标系或模型坐标系)这是对象的局部坐标系统,是对象在被应用任何变换之前的初始位置和方向所在的坐标系。
要对对象实行变换,可以使用glRotatef(), glTranslatef(), glScalef()等函数。
Eye Coordinates(眼坐标系或照相机坐标系)由GL_MODELVIEW矩阵和模型坐标系中坐标相乘的结果。
在OpenGL中使用GL_MODELVIEW矩阵来使对象从模型坐标系转换到眼坐标系。
GL_MODELVIEW矩阵是模型变换和视变换矩阵的组合(Mview*Mmodel)。
模型变换从对象坐标系转换到世界坐标系,而视变换从世界坐标系转换到眼坐标系。
注意:OpenGL中并没有单独的视变换矩阵。
因此,要想模拟变换照相机或者进行视变换,那么场景(3D对象和光照)必须以视变换矩阵的逆矩阵进行变换。
换言之,OpenGL将照相机定义在位于眼坐标系下朝向-Z轴,位于点(0,0,0)的位置,而不能进行变换。
法向量同样从对象坐标系变换到眼坐标系来用于光照计算。
注意:法向量的转换方式和顶点不同。
它用法向量乘以GL_MODELVIEW矩阵的逆矩阵的转置矩阵。
请参考Normal Vector Transformation获取更多细节。
游戏软件设计课程报告(三维球体的实现)院系:专业:学号:姓名:指导教师:2010年10月10日目录目录一、应用程序的最终界面----------------------------------------------------------------1二、三维球体的绘制---------------------------------------------------------------------21、球体绘制方法研究 ----------------------------------------------------------------22、面分解法的实现----------------------------------------------------------------32.1面分解函数 ----------------------------------------------------------------32.2初值的选取 ----------------------------------------------------------------32.3 球体的实现----------------------------------------------------------------43、三角形绘制函数----------------------------------------------------------------44、三角面法向量函数 ----------------------------------------------------------------55、点的模长扩展函数 ----------------------------------------------------------------56、南北极法的实现----------------------------------------------------------------57、动画的实现-------------------------------------------------------------------10三、二种绘制方法的比较---------------------------------------------------------------12一、应用程序的最终界面一、应用程序的最终界面本OpenGL应用程序的最终界面主要由二部分构成,其一是参数控制栏,其二是视图显示窗。
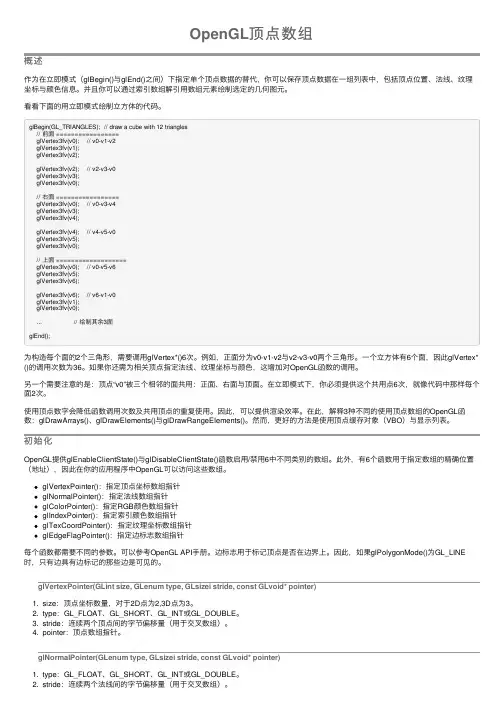
OpenGL顶点数组概述作为在⽴即模式(glBegin()与glEnd()之间)下指定单个顶点数据的替代,你可以保存顶点数据在⼀组列表中,包括顶点位置、法线、纹理坐标与颜⾊信息。
并且你可以通过索引数组解引⽤数组元素绘制选定的⼏何图元。
看看下⾯的⽤⽴即模式绘制⽴⽅体的代码。
glBegin(GL_TRIANGLES); // draw a cube with 12 triangles// 前⾯ =================glVertex3fv(v0); // v0-v1-v2glVertex3fv(v1);glVertex3fv(v2);glVertex3fv(v2); // v2-v3-v0glVertex3fv(v3);glVertex3fv(v0);// 右⾯ =================glVertex3fv(v0); // v0-v3-v4glVertex3fv(v3);glVertex3fv(v4);glVertex3fv(v4); // v4-v5-v0glVertex3fv(v5);glVertex3fv(v0);// 上⾯ ===================glVertex3fv(v0); // v0-v5-v6glVertex3fv(v5);glVertex3fv(v6);glVertex3fv(v6); // v6-v1-v0glVertex3fv(v1);glVertex3fv(v0);... // 绘制其余3⾯glEnd();为构造每个⾯的2个三⾓形,需要调⽤glVertex*()6次。
例如,正⾯分为v0-v1-v2与v2-v3-v0两个三⾓形。
⼀个⽴⽅体有6个⾯,因此glVertex* ()的调⽤次数为36。
如果你还需为相关顶点指定法线、纹理坐标与颜⾊,这增加对OpenGL函数的调⽤。
另⼀个需要注意的是:顶点“v0”被三个相邻的⾯共⽤:正⾯、右⾯与顶⾯。
opengles 顶点理解-回复OpenGL ES (Open Graphics Library for Embedded Systems) 是针对嵌入式系统的图形库,主要用于在移动设备和嵌入式平台上进行图形渲染和加速。
在OpenGL ES中,顶点是一种重要的图形元素,通过定义和操作顶点,可以创建出各种形状和效果。
本文将详细介绍OpenGL ES顶点的概念、属性和使用方法。
一、顶点概念在计算机图形学中,顶点是由一组属性(如位置、颜色、纹理坐标等)描述的几何图形的端点。
在OpenGL ES中,每个顶点通常都有一个位置属性,用于指定顶点在三维空间中的坐标。
除了位置属性外,顶点还可以具有其他属性,如颜色属性、纹理坐标属性等。
二、顶点属性顶点属性是指描述顶点特征的数据,它由多个分量组成。
在OpenGL ES 中,常见的顶点属性包括位置属性、颜色属性、法线属性、纹理坐标属性等。
这些属性可以分别存储在单独的顶点缓冲区对象(Vertex Buffer Object,VBO)中,或者打包在一个通用的顶点缓冲区对象中。
1. 位置属性位置属性是描述顶点在三维空间中位置的属性,它通常由三个浮点数分量(x、y、z)组成。
位置属性可以用来确定几何图形的形状和位置,并以此进行坐标变换、投影等操作。
在OpenGL ES中,位置属性通常被指定为顶点着色器的输入。
2. 颜色属性颜色属性是描述顶点颜色的属性,它通常由三个或四个浮点数分量(r、g、b、a)组成。
颜色属性可以用来指定顶点的着色方式,例如实现光照效果、渐变效果等。
在OpenGL ES中,颜色属性通常被指定为顶点着色器的输入。
3. 法线属性法线属性是描述三角形面的法线(即垂直于面的向量)的属性,它通常由三个浮点数分量(x、y、z)组成。
法线属性可以用来计算光照效果、阴影效果等。
在OpenGL ES中,法线属性通常被指定为顶点着色器的输入。
4. 纹理坐标属性纹理坐标属性是描述顶点在纹理图像中位置的属性,它通常由两个浮点数分量(s、t)组成。
Opengl绘制我们的⼩屋(⼀)球体,⽴⽅体绘制这个系列我想⽤来运⽤opengl红⽪书的前⼋章节的内容,来打造⼀个室内⼩屋.这⼀章主要是定义⼏个基本的结构.并给出球体与⽴⽅体的画法,先让我们来定义⼀些基本的结构.⼀个是包含点,法向量,纹理贴图向量,⼆是矩形与圆形的⽗类,包含⼀些基本公有的处理. 1type T2N3V3 =2struct3val mutable TexCoord : Vector24val mutable Normal : Vector35val mutable Position : Vector36new(v,n,p) = {TexCoord = v;Normal = n;Position = p}7end8 [<AbstractClass>]9type Shape() =10let mutable bCreate = false11let mutable vi = 012let mutable ei = 013let mutable count = 014member this.vboID with get() = vi and set value = vi <- value15member this.eboID with get() = ei and set value = ei <- value16member this.TriangelCount with get() = count and set value = count <- value17member this.IsCreate with get() = bCreate and set value = bCreate <- value18abstract Draw : unit -> unit19abstract Init : unit -> unit20member this.InitQ : unit -> unit =fun () -> ()View Code然后是球体的画法,相关具体过程如上篇,先贴上代码,我会对其中⼀些做些说明.1type Sphere(radius:float32,level:int) =2inherit Shape()3let mutable rad,lev = radius,level4let RightLevel =5if lev < 0then lev <- 06 elif lev > 6then lev <-67override this.Draw() =8if this.IsCreate<>true then this.Init()9 GL.BindBuffer(BufferTarget.ArrayBuffer,this.vboID)10 GL.BindBuffer(BufferTarget.ElementArrayBuffer,this.eboID)11 GL.InterleavedArrays(InterleavedArrayFormat.T2fN3fV3f,0,IntPtr.Zero)12 GL.DrawElements(BeginMode.Triangles,this.TriangelCount,DrawElementsType.UnsignedInt,IntPtr.Zero)13override this.Init() =14let alls = Array.create 6 (new T2N3V3())15 alls.[0] <- new T2N3V3(new Vector2( 0.0f, 0.0f ), Vector3.UnitX, Vector3.UnitX * rad )16 alls.[1] <- new T2N3V3(new Vector2( 0.0f, 0.0f ), Vector3.UnitY, Vector3.UnitY * rad )17 alls.[2] <- new T2N3V3(new Vector2( 0.0f, 0.0f ), Vector3.UnitZ, Vector3.UnitZ * rad )18 alls.[3] <- new T2N3V3(new Vector2( 0.0f, 0.0f ), -Vector3.UnitX, -Vector3.UnitX * rad )19 alls.[4] <- new T2N3V3(new Vector2( 0.0f, 0.0f ), -Vector3.UnitY, -Vector3.UnitY * rad )20 alls.[5] <- new T2N3V3(new Vector2( 0.0f, 0.0f ), -Vector3.UnitZ, -Vector3.UnitZ * rad )21let is = [|221;2;0230;2;4240;4;5255;1;0261;3;2274;2;3284;3;5291;5;330 |]31let (vvv:T2N3V3 []),(iv: int[]) = this.Sub (alls,is)32let mutable vID,eID = 0,033//let mutable tv,vv,pv = vvv |> Array.map (fun v -> v.TexCoord,v.Normal,v.Position) |> Array.unzip334 GL.GenBuffers(1,&vID)35 GL.BindBuffer(BufferTarget.ArrayBuffer,vID)36 GL.BufferData(BufferTarget.ArrayBuffer,IntPtr (4 * 8 * vvv.Length),vvv,BufferUsageHint.StaticDraw)3738 GL.GenBuffers(1,&eID)39 GL.BindBuffer(BufferTarget.ElementArrayBuffer,eID)40 GL.BufferData(BufferTarget.ElementArrayBuffer,IntPtr (4 * iv.Length),iv,BufferUsageHint.StaticDraw)4142 this.vboID <- vID43 this.eboID <- eID44 this.TriangelCount <- iv.Length45 this.IsCreate <- true46 ()47member v.GetMidValue (first:T2N3V3,second:T2N3V3) =48let midN = Vector3.Lerp(first.Position,second.Position,0.5f) |> Vector3.Normalize49let midP = midN *(float32 rad)50let midT = Vector2.Lerp(first.TexCoord,second.TexCoord,0.5f) |> Vector2.Normalize51let result = new T2N3V3(midT,midN,midP)52 result53member v.Subdivide (v1:T2N3V3,v2:T2N3V3,v3:T2N3V3) =54let vs = Array.create 6 (new T2N3V3())55 vs.[0] <- v156 vs.[1] <- v.GetMidValue(v1,v2)57 vs.[2] <- v.GetMidValue(v3,v1)58 vs.[3] <- v259 vs.[4] <- v.GetMidValue(v2,v3)60 vs.[5] <- v361let is = Array.create 12062 is.[0] <- 063 is.[1] <- 164 is.[2] <- 265 is.[3] <- 266 is.[4] <- 167 is.[5] <- 468 is.[6] <- 469 is.[7] <- 170 is.[8] <- 371 is.[9] <- 272 is.[10] <-473 is.[11] <- 574 (vs,is)75member this.Sub(alls:T2N3V3 [],is:int []) =76//let mutable tv,vv,pv = alls |> Array.map (fun v -> v.TexCoord,v.Normal,v.Position) |> Array.unzip377let mutable allv = alls78let mutable iv = is79let show array = printfn "%A" array80for j in0 .. lev do81let mutable av = Array.create 0 (new T2N3V3())82let mutable ev = Array.create 0083 printfn "%i" allv.Length84 printfn "%i" iv.Length85for i in0 .. 3 .. iv.Length - 1do86let (vvv,iiv) = this.Subdivide(allv.[iv.[i]],allv.[iv.[i+1]],allv.[iv.[i+2]])87let length = av.Length88 av <- Array.append av vvv89let map = iiv |> Array.map (fun p -> p + length)90 ev <- Array.append ev map91 allv <- av92 iv <- ev93 allv |> Array.map (fun p -> p.Position) |> show94 show iv95 allv,ivView Code初始化需要的⼆个参数,分别代表球的⼤⼩(radius),与画的细分程度(level).其中相关如何绘制球体代码在上⽂有讲,相当于有是把⼀个分别位于x,y,z各(+radius,-radius)这六个点,组成的⼀个⼋个三⾓形,索引点的位置如Init⾥GL.InterleavedArrays(InterleavedArrayFormat.T2fN3fV3f,0,IntPtr.Zero)其中的T2fN3fV3f对应于我们的数据结构T2N3V3,这个函数分别相当于指定GL.TexCoordPointer,GL.NormalPointer,GL.VertexPointer(还会打开相应状态),会⾃动给我们处理好,我们也可以只指定顶点,如下GL.VertexPointer(3,VertexPointerType.Float,4*8,IntPtr (4*8-4*5)),这些数据之间的间隔对应与我们前⾯写⼊的GL.BufferData(BufferTarget.ArrayBuffer,IntPtr (4 * 8 * vvv.Length),vvv,BufferUsageHint.StaticDraw)其中vvv是T2N3V3的结构.基本的GL.BindBuffer的对应的三个处理就不细说了,在Draw⾥,BindBuffer是指定我们当前格式数据在存储位置,然后分别调⽤InterleavedArrays设定各顶点的状态,然后是调⽤DrawElements对应上⾯的GL.BindBuffer(BufferTarget.ElementArrayBuffer,this.eboID)处理.然后是⽴⽅体的绘制,其中⽴⽅体的绘制⽤的⽅法看起来会容易理解.如下1type Cube(width:float32,height:float32,length:float32,index:int) =2inherit Shape()3let mutable id = index4let xl,yl,zl =width/2.f,height/2.f,length/2.f5let mutable color = Color.White6let v8 = [|7new Vector3(xl,yl,zl)8new Vector3(-xl,yl,zl)9new Vector3(-xl,-yl,zl)10new Vector3(xl,-yl,zl)11new Vector3(xl,yl,-zl)12new Vector3(-xl,yl,-zl)13new Vector3(-xl,-yl,-zl)14new Vector3(xl,-yl,-zl)15 |]16new(x,y,z) =17let rnd = System.Random().Next()18 printfn "%i" rnd19 Cube(x,y,z,-1)20override this.Draw() =21if this.IsCreate<>true then this.Init()22 GL.EnableClientState(ArrayCap.VertexArray)23 GL.EnableClientState(ArrayCap.NormalArray)24 GL.BindBuffer(BufferTarget.ArrayBuffer,this.vboID)25 GL.VertexPointer(3,VertexPointerType.Float,0,IntPtr.Zero)26 GL.PushMatrix()27if id >= 0 && id < 8then28 GL.Translate(v8.[id])29 GL.Color3(this.Color:Color)30 GL.Normal3(Vector3.UnitZ)31 GL.DrawElements(BeginMode.Triangles,6,DrawElementsType.UnsignedInt,[|0;1;2;0;2;3|])32//GL.Color3(Color.Black)33 GL.Normal3(Vector3.UnitY)34 GL.DrawElements(BeginMode.Triangles,6,DrawElementsType.UnsignedInt,[|4;5;1;4;1;0|])35//GL.Color3(Color.Red)36 GL.Normal3(Vector3.UnitX)37 GL.DrawElements(BeginMode.Triangles,6,DrawElementsType.UnsignedInt,[|4;0;3;4;3;7|])38//GL.Color3(Color.Green)39 GL.Normal3(-Vector3.UnitY)40 GL.DrawElements(BeginMode.Triangles,6,DrawElementsType.UnsignedInt,[|3;2;6;3;6;7|])41//GL.Color3(Color.Blue)42 GL.Normal3(-Vector3.UnitX)43 GL.DrawElements(BeginMode.Triangles,6,DrawElementsType.UnsignedInt,[|1;5;6;1;6;2|])44//GL.Color3(Color.DodgerBlue)45 GL.Normal3(-Vector3.UnitZ)46 GL.DrawElements(BeginMode.Triangles,6,DrawElementsType.UnsignedInt,[|5;4;7;5;7;6|])47 GL.PopMatrix()48override this.Init() =49let mutable vID = 050 GL.GenBuffers(1,&vID)51 GL.BindBuffer(BufferTarget.ArrayBuffer,vID)52 GL.BufferData(BufferTarget.ArrayBuffer,IntPtr (4 * 3 * v8.Length),v8,BufferUsageHint.StaticDraw)53 this.vboID <- vID54 this.IsCreate <- true55let rnd = System.Random(this.GetHashCode())56 this.Color <- Color.FromArgb(rnd.Next(0,255),rnd.Next(0,255),rnd.Next(0,255))57 ()58member this.Index with get() = id and set value = id <-value59member this.Color with get() = color and set value = color <- valueView Code上图中的V8分别对应其中的0-7个顶点,GL.DrawElements后⾯的0;1;2;0;2;3分别是以三⾓形的画法来画⼀个正⽅形.⽴⽅体的画法主要是确定宽,⾼,长,我们这样定义,我们站在原点上,⾯向Z+轴,我们的⼿展开来表⽰X轴(对应宽度),⽽我们的⾝⾼表⽰Y轴(对应⾼度),和我们⾯向距离的长远来表⽰Z轴,(对应长度).绘制也是8个⾯,和上⾯⼀样,也是在缓存中记录顶点,但是不⼀样的是,顶点索引是在绘制时没有⽤到顶点索引缓存,主要考虑后⾯有法向量的处理,还有现在没有加上的纹理贴图的处理.在这⾥,我们要特别注意,顶点顺序问题,在opengl,默认正⾯是逆时针,⽽我们可以看0;1;2;0;2;3对应图上的顺序.然后⼤家可能会发现,画⽴⽅体的后⾯5;4;7;5;7;6,这个顺序好像不对,是顺时针的.⼤家可以想象下,我们在门外看门的逆时针画法与我们在门内看门外顺时针的画法是⼀样的.所以如果我们要画后⾯4,5,6,7我们以为的是逆时针是不对的,我们要想象我们在那边来看,然后再画,应该是5,4,7,6这个⽅向.其中纹理贴图后⾯会说,和这处理也有类似.在上⾯,我们看到我们都没对顶点的颜⾊来定义,这⾥没必要,因为后⾯我们肯定要⽤到灯光,⽤到灯光的话,设置的颜⾊都没⽤,我们会⽤到灯光颜⾊与材质的颜⾊.纹理贴图也有没对应处理,这⾥在后⾯我会根据讲到再来改写相关处理.下⼀节,主要是讲第⼀⼈称漫游的相关处理.。
OpenGL空间(坐标系)变换⽹友的《3D图形学的学习策略》⼀⽂使我深受启发,在图形学以及openGL学习⽅⾯给了我很有价值的指导性意见,在此对前辈们的不吝赐教表⽰感激,谢谢你们的⽆私分享。
如⽂章所说,API是⼯具,不是本质,OpenGL/Direct3D的本质是图形学,⽽不是OpenGL/Direct3D的本⾝,API的本⾝只是⼀些Interface⽽已。
最重要的,最根本的是,你要明⽩这些API背后的图形学的原理---因为那才是根本中的根本。
其实很多事情,包括学习也涉及到⽣活,只有抓住了本质,才能体会到其中的真谛。
带着这种希望探究本质的学习⽅法,结合图形学原理,通过阅读书⽬和⽹友们的⽂章,我对OpenGL⼏何空间变换进⾏了总结性的学习。
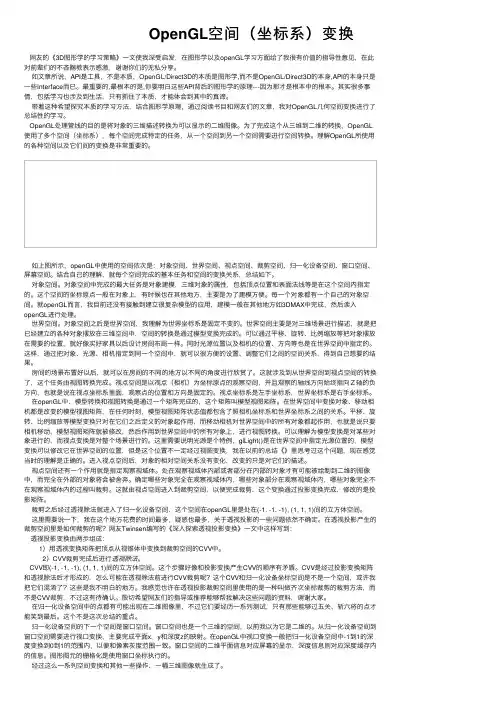
OpenGL处理管线的⽬的是将对象的三维描述转换为可以显⽰的⼆维图像。
为了完成这个从三维到⼆维的转换,OpenGL 使⽤了多个空间(坐标系),每个空间完成特定的任务,从⼀个空间到另⼀个空间需要进⾏空间转换。
理解OpenGL所使⽤的各种空间以及它们间的变换是⾮常重要的。
如上图所⽰,openGL中使⽤的空间依次是:对象空间、世界空间、视点空间、裁剪空间、归⼀化设备空间、窗⼝空间、屏幕空间。
结合⾃⼰的理解,就每个空间完成的基本任务和空间的变换关系,总结如下。
对象空间。
对象空间中完成的最⼤任务是对象建模,三维对象的属性,包括顶点位置和表⾯法线等是在这个空间内指定的。
这个空间的坐标原点⼀般在对象上,有时候也在其他地⽅,主要是为了建模⽅便。
每⼀个对象都有⼀个⾃⼰的对象空间。
就openGL⽽⾔,我⽬前还没有接触到建⽴很复杂模型的应⽤,建模⼀般在其他地⽅如3DMAX中完成,然后读⼊openGL进⾏处理。
世界空间。
对象空间之后是世界空间,我理解为世界坐标系是固定不变的。
世界空间主要是对三维场景进⾏描述,就是把已经建⽴的各种对象摆放在三维空间中,空间的转换是通过模型变换完成的。
可以通过平移、旋转、⽐例缩放等把对象摆放在需要的位置,就好像买好家具以后设计房间布局⼀样。
详解OpenGL的坐标系、投影和几何变换作者:charlee 按:我也是在迷茫中走过来的,初学OpenGL时,略微了解了一些有关变换的基本知识,但是却不知道具体的使用方法,因此经常需要在布置场景时反复调整各种参数。
当我终于有一天明白了它们的用法时,就觉得应该把这些心得体会写下来,让那些和我一样曾经迷茫过的人能够迅速地找到出路。
本文的读者对象为那些初学OpenGL,了解了一些坐标系、几何变换等基本知识,但是又不知道具体应该如何运用这些操作的人。
如果你对OpenGL一无所知,建议你先去学学OpenGL的基本知识。
1 坐标系OpenGL中使用的坐标系有两种,分别为世界坐标系和屏幕坐标系。
世界坐标系即OpenGL内部处理时使用的三维坐标系,而屏幕坐标系即为在计算机屏幕上绘图时使用的坐标系。
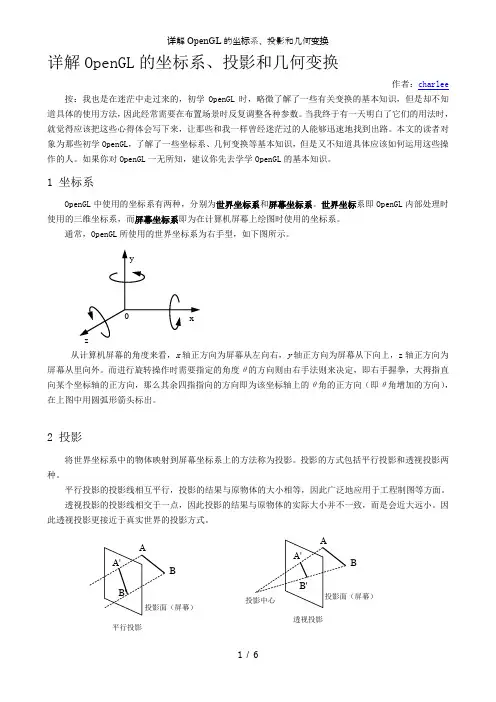
通常,OpenGL所使用的世界坐标系为右手型,如下图所示。
从计算机屏幕的角度来看,x轴正方向为屏幕从左向右,y轴正方向为屏幕从下向上,z轴正方向为屏幕从里向外。
而进行旋转操作时需要指定的角度θ的方向则由右手法则来决定,即右手握拳,大拇指直向某个坐标轴的正方向,那么其余四指指向的方向即为该坐标轴上的θ角的正方向(即θ角增加的方向),在上图中用圆弧形箭头标出。
2 投影将世界坐标系中的物体映射到屏幕坐标系上的方法称为投影。
投影的方式包括平行投影和透视投影两种。
平行投影的投影线相互平行,投影的结果与原物体的大小相等,因此广泛地应用于工程制图等方面。
透视投影的投影线相交于一点,因此投影的结果与原物体的实际大小并不一致,而是会近大远小。
因此透视投影更接近于真实世界的投影方式。
B 平行投影B透视投影xzy 02.1 平行投影OpenGL 中使用下面的函数来设置投影方式为平行投影。
glOrtho(xleft, xright, ybottom, ytop, znear, zfar); 各参数的含义如下图所示。
注意,只有位于立方体之内的物体才可见。
实用标准文案投影变即几何变换、OpenGL通过相机模拟、可以实现计算机图形学中最基本的三维变换,还实现了矩阵堆栈等。
理解掌握了有关坐标变OpenGL换、裁剪变换、视口变换等,同时,换的内容,就算真正走进了精彩地三维世界。
中的三维物体的显示一、OpenGL(一)坐标系统显示二维的但计算机本身只能处理数字,在现实世界中,所有的物体都具有三维特征,图形,将三维物体及二维数据联系在一起的唯一纽带就是坐标。
这为了使被显示的三维物体数字化,要在被显示的物体所在的空间中定义一个坐标系。
这个坐标系称为世界坐标个坐标系的长度单位和坐标轴的方向要适合对被显示物体的描述,系。
世界坐标系是始终固定不变的。
也就是坐标系以物体的中心为还定义了局部坐标系的概念,所谓局部坐标系,OpenGL当物体模型进行旋这时,坐标原点,物体的旋转或平移等操作都是围绕局部坐标系进行的,如果对物体需要注意的是,转或平移等操作时,局部坐标系也执行相应的旋转或平移操作。
如果缩放比例在案各坐标轴上不同,则局部坐标系也要进行相应的缩放,模型进行缩放操作,无论是在世界坐标系中进行转局部坐标轴之间可能不再相互垂直。
那么再经过旋转操作后,只是不同的坐标系考虑的转换方式不换还是在局部坐标系中进行转换,程序代码是相同的,同罢了。
这就要在图形显要在图形显示器上显示,计算机对数字化的显示物体作了加工处理后,这个坐标系坐标轴的方这个坐标系称为屏幕坐标系。
示器屏幕上定义一个二维直角坐标系,向通常取成平行于屏幕的边缘,坐标原点取在左下角,长度单位常取成一个象素。
(二)三维物体的相机模拟为了说明在三维物体到二维图象之间,需要经过什么样的变换,我们引入了相机)模拟的方式,假定用相机来拍摄这个世界,那么在相机的取景器中,就存在人(Camera 眼和现实世界之间的一个变换过程。
精彩文档.实用标准文案中的各种坐标变换图一、相机模拟OpenGL从三维物体到二维图象,就如同用相机拍照一样,通常都要经历以下几个步骤:1、将相机置于三角架上,让它对准三维景物,它相当于OpenGL中调整视点的位置,即视点变换(Viewing Transformation)。
逆变换和模拟变换几何处理管线擅长使用视图和投影矩阵以及用于裁剪的视口把顶点的世界(物体)坐标变换为窗口(屏幕)坐标。
但是,在有些情况下,需要反转这个过程。
一种常见的情形就是应用程序的用户利用鼠标选择了三维空间中的一个位置。
鼠标只返回一个二维值,也就是鼠标光标的屏幕位置。
因此,应用程序必须反转变换过程,确定这个屏幕位置源于三维空间的什么地方。
OpenGL工具函数库中gluUnProject()和gluUnProject4()函数用于执行这种逆变换操作。
只要提供一个经过变换的顶点的三维窗口坐标以及所有对它产生影响的变换,gluUnProject()就可以返回这个顶点的源物体坐标。
如果深度范围不是默认的[0, 1],应该使用gluUnProject4()函数。
int gluUnProject(GLdouble winx, GLdouble winy, GLdouble winz,const GLdouble modelMatrix[16],const GLdouble projMatrix[16],const GLint viewport[4],GLdouble *objx, GLdouble *objy, GLdouble *objz);这个函数使用由模型视图矩阵(modelMatrix)、投影矩阵(projMatrix)和视口(viewpo rt)定义的变换,把指定的窗口坐标(winx, winy, winz)映射到物体坐标。
它产生的物体坐标是在o bjx、objy和objz中返回的。
这个函数返回GL_TRUE(表示成功)或GL_FALSE(表示失败,例如矩阵不可逆)。
这个函数并不会使用视口对坐标进行裁剪,也不会消除那些位于glDepthRange()范围之外的深度值。
对变换过程进行逆操作存在一些固有的难度。
二维屏幕上的一个位置可以来自于三维空间中一条直线上的任意一点。
为了消除这种歧义,gluUnProject()要求提供一个窗口深度坐标(win z),它是根据glDepthRange()函数指定的。
OPENGL坐标系介绍世界坐标系和当前绘图坐标系区别
OPENGL坐标系可分为:世界坐标系和当前绘图坐标系。
世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。
你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。
长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角坐标为(-1,-1),右上角坐标为(1,1)。
当前绘图坐标系:是绘制物体时的坐标系。
程序刚初始化时,世界坐标系和当前绘图坐标系是重合的。
当用glTranslatef(),glScalef(), glRotatef()等对当前绘图坐标系进行平移、伸缩、旋转变换之后,世界坐标系和当前绘图坐标系不再重合。
注意,这里的平移旋转是将当前绘图坐标系看做一个整体在世界坐标系中进行旋转平移。
然后,改变以后,再用glVertex3f()等绘图函数绘图时,都是在当前绘图坐标系进行绘图,所有的函数参数也都是相对当前绘图坐标系来讲的。
齐次坐标只讲三维的情况啊
向量空间中,只有标量和向量
向量+ 向量= 向量
标量* 向量= 向量
三维向量空间中,可以视任意一组线性无关的向量为基
基V = [v1 ,v2 ,v3 ]
其他向量可以用一个三维的元组来表示
向量a = [A1 ,A2 ,A3 ]
于是向量a = A1 * v2 + A2 * v2 + A3 * v3
仅有向量是无法表示几何的,至少要有点吧
一般认为点的表示也是一个三维的元组
点b = [B1 ,B2 ,B3 ]
这样就无法区分点和向量了,咋办?。
opengl圆弧起点与终点坐标绘制圆弧是OpenGL中常见的操作之一,但在绘制过程中,确定圆弧的起点与终点坐标是十分重要的。
本文将介绍如何通过OpenGL确定圆弧的起点与终点坐标,以及相关的计算方法。
圆弧是指由一段弧线所围成的图形,其起点和终点坐标在绘制过程中起着关键作用。
在OpenGL中,通过指定起点和终点坐标,我们可以绘制出想要的圆弧。
首先,我们需要明确圆弧的起点和终点坐标是相对于圆心的位置。
圆心通常是我们在绘制过程中指定的一个点,可以通过指定圆心的坐标来确定。
在绘制圆弧时,我们需要确定圆心、半径以及起点和终点的角度。
在OpenGL中,角度通常是以弧度为单位进行计算和指定的。
因此,我们需要将度数转换为弧度数值。
确定起点和终点坐标的方法之一是通过角度的计算。
我们可以通过指定起点和终点的角度值来确定其在圆上的位置。
通过将角度转换为弧度,我们可以利用三角函数来计算出对应的坐标值。
具体而言,可以通过以下公式来计算圆弧上某点的坐标:x=圆心横坐标+半径*cos(角度)y=圆心纵坐标+半径*sin(角度)其中,x和y分别为圆弧上某点的横纵坐标,圆心横纵坐标为圆心的横纵坐标,半径为圆的半径,角度为起点或终点的角度值。
在绘制圆弧时,我们可以先确定起点和终点的角度值,并将其转换为弧度值。
然后,根据上述公式计算出对应的起点和终点坐标,最后通过OpenGL的绘制函数将圆弧绘制出来。
需要注意的是,起点和终点的角度值可以是任意值,但需要保证起点和终点在相同的圆上。
另外,通过调整起点和终点的角度值,我们可以实现不同方向和大小的圆弧绘制。
综上所述,通过OpenGL绘制圆弧时,确定圆弧的起点与终点坐标是十分关键的。
我们可以通过指定圆心的坐标和起点终点的角度值,利用三角函数算法计算出对应的坐标值,最终绘制出所需的圆弧形状。
希望本文对您在OpenGL中绘制圆弧时的起点与终点坐标确定有所帮助。
如有疑问,请随时留言,我将尽快回复。
opengl顶点坐标纹理坐标关系OpenGL是一种图形编程接口,用于创建交互式三维应用程序。
OpenGL依靠一些最基本的图形概念来定义应用程序中的所有对象,其中包括顶点,纹理和坐标。
在OpenGL 中,这些概念之间的关系是一个非常重要的方面,特别是在创建三维模型时。
在OpenGL中,一个模型是由一组顶点定义的。
每个顶点包含三个坐标值:x、y和z。
这些坐标值表示三维空间中的位置。
例如,如果我们想要绘制一个正方体,我们需要定义每个顶点的坐标值。
正方体有六个面,每个面有四个顶点。
因此,我们需要定义顶点的坐标值为(1,1,1)、(-1,1,1)、(-1,-1,1)、(1,-1,1)、(1,1,-1)、(-1,1,-1)、(-1,-1,-1)和(1,-1,-1),这些坐标值确定了正方体的形状和大小。
除了顶点坐标外,纹理坐标也是非常重要的。
纹理是一张平面图像,用于覆盖到对象表面上,使其贴图效果更加真实。
每个像素点对应到一个坐标系中的点,我们称之为纹理坐标。
纹理坐标是介于0和1之间的浮点数,它们控制哪些部分的纹理图像用于哪些部分的模型表面。
在OpenGL中,纹理坐标通过顶点属性向着色器传递,然后用于计算纹理颜色。
顶点和纹理坐标之间的关系是通过OpenGL的纹理映射功能实现的。
纹理映射可将纹理图像映射到模型表面上,使其具有更丰富的视觉效果。
为了实现这一点,我们需要指定每个顶点的纹理坐标,以便在绘制过程中正确应用纹理贴图。
通常,每个顶点具有一个对应的纹理坐标,然后OpenGL会将这些纹理坐标插值成一个平滑的纹理映射区域,以便在绘制过程中创建出更加真实的纹理贴图效果。
在OpenGL中,我们通常使用两组坐标系来表示顶点和纹理坐标之间的关系。
世界坐标系用于定义三维物体的位置和大小,而纹理坐标系用于确定纹理图像的坐标位置。
由于这两个坐标系使用不同的度量单位,所以我们需要进行特殊的映射处理,以便正确地将纹理映射到模型表面上。
OpenGL通过相机模拟、可以实现计算机图形学中最基本的三维变换,即几何变换、投影变换、裁剪变换、视口变换等,同时,OpenGL还实现了矩阵堆栈等。
理解掌握了有关坐标变换的内容,就算真正走进了精彩地三维世界。
一、OpenGL中的三维物体的显示(一)坐标系统在现实世界中,所有的物体都具有三维特征,但计算机本身只能处理数字,显示二维的图形,将三维物体及二维数据联系在一起的唯一纽带就是坐标。
为了使被显示的三维物体数字化,要在被显示的物体所在的空间中定义一个坐标系。
这个坐标系的长度单位和坐标轴的方向要适合对被显示物体的描述,这个坐标系称为世界坐标系。
世界坐标系是始终固定不变的。
OpenGL还定义了局部坐标系的概念,所谓局部坐标系,也就是坐标系以物体的中心为坐标原点,物体的旋转或平移等操作都是围绕局部坐标系进行的,这时,当物体模型进行旋转或平移等操作时,局部坐标系也执行相应的旋转或平移操作。
需要注意的是,如果对物体模型进行缩放操作,则局部坐标系也要进行相应的缩放,如果缩放比例在案各坐标轴上不同,那么再经过旋转操作后,局部坐标轴之间可能不再相互垂直。
无论是在世界坐标系中进行转换还是在局部坐标系中进行转换,程序代码是相同的,只是不同的坐标系考虑的转换方式不同罢了。
计算机对数字化的显示物体作了加工处理后,要在图形显示器上显示,这就要在图形显示器屏幕上定义一个二维直角坐标系,这个坐标系称为屏幕坐标系。
这个坐标系坐标轴的方向通常取成平行于屏幕的边缘,坐标原点取在左下角,长度单位常取成一个象素。
(二)三维物体的相机模拟为了说明在三维物体到二维图象之间,需要经过什么样的变换,我们引入了相机(Camera)模拟的方式,假定用相机来拍摄这个世界,那么在相机的取景器中,就存在人眼和现实世界之间的一个变换过程。
图一、相机模拟OpenGL中的各种坐标变换从三维物体到二维图象,就如同用相机拍照一样,通常都要经历以下几个步骤:1、将相机置于三角架上,让它对准三维景物,它相当于OpenGL中调整视点的位置,即视点变换(Viewing Transformation)。
opengl顶点运算
OpenGL顶点运算是指在OpenGL中对顶点数据进行计算和变
换的过程。
顶点运算是OpenGL图形渲染管线中的一个阶段,通常包括以下几个步骤:
1. 顶点输入:将顶点数据从CPU传输到GPU。
顶点数据通常
包括顶点坐标、颜色、法线等信息。
2. 顶点着色器:在GPU中执行的顶点计算程序。
顶点着色器
将对每个输入顶点进行计算,并输出变换后的顶点位置和其他属性。
3. 顶点变换和投影:对输入顶点进行变换和投影操作,将三维空间中的顶点映射到二维屏幕空间中。
4. 光栅化:将顶点转换为片段,并在屏幕上进行插值,确定每个像素的颜色。
顶点运算是OpenGL图形渲染过程中的关键步骤之一。
它可以用来实现各种图形效果,如变换、旋转、缩放、投影、光照等。
通过对顶点数据进行计算和变换,可以实现复杂的形状和动画效果。
OpenGL使用的是右手笛卡尔坐标系统,其中Z轴正方向垂直屏幕向外,X轴正方向从左到右,Y轴正方向从下到上。
以下是OpenGL中定义的几种坐标系:
1. **世界坐标系**:世界坐标系以屏幕中心为原点(0, 0, 0),在OpenGL中用来描述场景的坐标。
例如,可以使用这个坐标系来描述物体及光源的位置。
世界坐标系是不会被改变的。
2. **模型坐标系**:模型的绘制时使用的坐标系。
当模型发生旋转、平移等变化时,模型坐标系本身不会变化,变化的是模型在世界坐标系中的位置。
3. **视坐标系**:以视点为原点,以视线方向为Z轴正方向的坐标系。
OpenGL会将世界坐标系先变换到视坐标系,然后进行裁剪,只有在视见体之内的场景才会进入下一个阶段进行处理。
以上内容仅供参考,如需更多关于OpenGL的详情,可以查阅图形学相关的书籍或者咨询专业的技术人员。
opengl 球体顶点坐标
在OpenGL中,创建一个球体的最简单方法是使用纬度和经度来生成顶点坐标。
以下是一个例子:
```cpp
#include <cmath>
#include <vector>
std::vector<float> createSphereVertices(float radius, int stacks, int slices) {
std::vector<float> vertices;
for (int i = 0; i <= stacks; ++i) {
float latitude = M_PI / stacks * i;
float sinLat = sin(latitude);
float cosLat = cos(latitude);
for (int j = 0; j <= slices; ++j) {
float longitude = 2 * M_PI / slices * j;
float sinLon = sin(longitude);
float cosLon = cos(longitude);
float x = radius * sinLat * cosLon;
float y = radius * sinLat * sinLon;
float z = radius * cosLat;
vertices.push_back(x);
vertices.push_back(y);
vertices.push_back(z);
}
}
return vertices;
}
int main() {
float radius = 1.0f;
int stacks = 30;
int slices = 30;
std::vector<float> sphereVertices = createSphereVertices(radius, stacks, slices);
// 使用生成的顶点坐标绘制球体
// ...
return 0;
}
```
这段代码创建一个球体的顶点坐标,使用纬度(stacks)和经度(slices)作为输入参数,并将其返回为一个
`std::vector<float>`类型的容器。
你可以使用生成的顶点坐标来绘制球体。
请注意,这个例子中使用的是笛卡尔坐标系,即x 轴向右,y轴向上,z轴垂直于屏幕指向外部。