机械原理练习册(工大本科生使用,有详细解答)共50页,25元
- 格式:doc
- 大小:2.26 MB
- 文档页数:50

参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。


我们也要正确面对考试成绩。
“不以物喜,不以己悲",胜败乃兵家常事,对于一次考试的成功,我们不能盲目乐观,无论是谁,都不可能完美无缺,也许你还有许多弱点和缺点没有暴露,每份试卷都 会有不同的结果。
应该说,良好的开端是成功的一半,那另一半就是你要善于总结,不停地拼搏。
假如你还一直陶醉在暂时的幸福中,失败只是迟早到来的结局。
在顺利登上理想的彼岸之前,不轻言成功,这才是我们应取的态度。
考试失利的同学也未必是坏事,失败是一支清醒剂,是不断成功的动力,即使我们一百次跌倒也要 第一百零一次爬起,因为我们正处在人生攀登的山腰上,还有好长的路等待我们去开拓、创造。
失败乃成功之母,有人说我怎么只遇到成功的母亲。
是的,关键是你 没有能抓住成功的父亲,那就是——“态度、目标、勤奋、恒心”。
态度决定一切。
有这样一句话:“当我冷眼旁观时,生命是一只蓝色的蛹;当我热情相拥时,生命是一只金色的蝶”。
学习也是这样,当你把学习当作自己成 长发展的需要时,才能体验到学习的快乐;当你把学习当作是一种负担时,学习就是一种痛苦。
谁愿在一片郁闷和痛苦中学习呢?所以说,我们首先要调整心态,以愉快的心情投入到紧张的学习生活中,并善于在学习的过程中体验获取知识的快乐,体验克服困难的快乐,体验取得成功的快乐。
1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。

机械原理习题集原稿 Document number:NOCG-YUNOO-BUYTT-UU986-机械原理习题集姓名专业班级学号交通与机械工程学院基础教研室目录第一章绪论选择填空1、机构中的构件是由一个或多个零件所组成,这些零件间 B 产生任何相对运动。
A、可以B、不能2、构件是组成机器的B 。
A、制造单位B、独立运动单元C、原动件D、从动件简答题1、什么是机构、机器和机械机构:在运动链中,其中一个件为固定件(机架),一个或几个构件为原动件,其余构件具有确定的相对运动的运动链称为机构。
机器:能代替或减轻人类的体力劳动或转化机械能的机构。
机械:机器和机构的总称。
2、机器有什么特征(1)经过人们精心设计的实物组合体。
(2)各部分之间具有确定的相对运动。
(3)能代替或减轻人的体力劳动,转换机械能。
3、机构有什么特征(1)经过人们精心设计的实物组合体。
(2)各部分之间具有确定的相对运动。
4、什么是构件和零件构件:是运动的单元,它可以是一个零件也可以是几个零件的刚性组合。
零件:是制造的单元,加工制造不可再分的个体。
第二章平面机构的结构分析判断题1、具有局部自由度的机构,在计算机构的自由度时,应当首先除去局部自由度。
(√)2、具有虚约束的机构,在计算机构的自由度时,应当首先除去虚约束。
(√)3、虚约束对运动不起作用,也不能增加构件的刚性。
(×)4、六个构件组成同一回转轴线的转动副,则该处共有三个转动副。
(×)选择填空1、原动件的自由度应为 B 。
A、0B、1C、22、机构具有确定运动的条件是 B 。
A、自由度>0B、自由度=原动件数C、自由度>13、由K个构件汇交而成的复合铰链应具有A 个转动副。
A、K-1B、KC、K+14、一个作平面运动的自由构件有B 个自由度。
A、1B、3C、65、通过点、线接触构成的平面运动副称为 C 。
A、转动副B、移动副C、高副6、通过面接触构成的平面运动副称为A 。

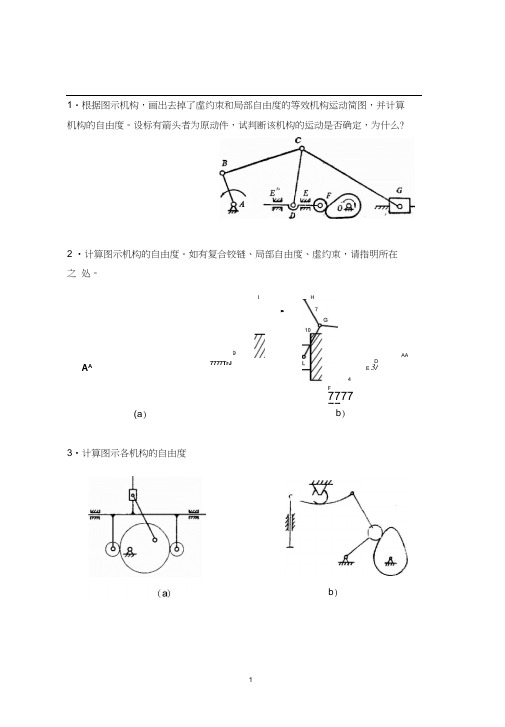
1・根据图示机构,画出去掉了虚约朿和局部自由度的等效机构运动简图,并计算机构的自由度。
设标有箭头者为原动件,试判断该机构的运动是否确定,为什么?2 •计算图示机构的自由度。
如有复合铰链、局部自由度、虚约朿,请指明所在之处。
IHA A7777TrJAA(a)3•计算图示各机构的自由度F777777b)94DE 3/8b)4•计算机构的自由度,并进行机构的结构分析,将其基本杆组拆分出来,指出各 个基本杆组的级别以及机构的级别。
(d )(f )(a) (b)5. 计算机构的自由度,并分析组成此机构的基本杆组。
如果在该机构中改选FG为原动件,试问组成此机构的基本杆组是否发生变化。
修改方案。
(C)6.试验算图示机构的运动是否确定如机构运动不确定请提出其具有确定运动的(a)(d)2、已知图示机构的输入角速度∙ι,试用瞬心法求机构的输出速度∙3。
要求画出相 应的瞬心,写出• 3的表达式,并标明方向。
、综合题第三章平面机构的运动分析1、试求图示各机构在图示位置时全部瞬心的位置(用符号P 直接在图上标出)3、在图示的齿轮--连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω 1/ ω 24、在图示的四杆机构中,I AB =60mm, I CD =90mm, IAD=I BC=120mm,<θ2=10rad∕s ,试用瞬心法求:(1)当「=165°时,点C的速度V C ;(2)当=165°时,构件3的BC线上速度最小的一点E的位置及其速度的大小;.(3)当V^^0时,「角之值(有两个解)。
5、如图为一速度多边形, 请标出矢量V AB、V BC、V CA及矢量V A、V B、V C的万向?6、已知图示机构各构件的尺寸,构件1以匀角速度ωι转动,机构在图示位置时的速度和加速度多边形如图b)、C)所示。
(1)分别写出其速度与加速度的矢量方程,并分析每个矢量的方向与大小,(2)试在图b)、C)上分别标出各顶点的符号, 以及各边所代表的速度或加速度及其指向。
第二章机构的结构分析一、填空与选择题1、B、A2、由两构件直接接触而产生的具有某种相对运动3、低副,高副,2,14、后者有作为机架的固定构件5、自由度的数目等于原动件的数目;运动不确定或机构被破坏6、√7、8、m-19、受力情况10、原动件、机架、若干个基本杆组11、A、B 12、C 13、C二、绘制机构简图1、计算自由度n=7, P L=9,P H=2 F=3n-2P L-P H=3×7-2×9-2=12、3、 4、三、自由度计算(a)E处为局部自由度;F处(或G处)为虚约束计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(b)E处(或F处)为虚约束计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约束计算自由度n=9,P L=12,P H=2 F=3n-2P L-P H=3×9-2×12-2=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束计算自由度n=7,P L=9,P H=1 F=3n-2P L-P H=3×7-2×9-1=2自由度的数目大于原动件的数目所以该机构不具有确定的运动。
(e) 构件CD(或EF)及其两端的转动副引入一个虚约束计算自由度n=3,P L=4,P H=0 F=3n-2P L-P H=3×3-2×4=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(f) C处为复合铰链;计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
《机械设计基础》习题网上选答第3章平面机构的结构分析1判断:(1)大多数的常用机构是空间机构(×)(2)一个作平面运动的构件有2个独立运动参数(×)(3)一个作平面运动的构件有5个自由度(×)(4)转动副的约束数为2(√)(5)高副的约束数为1(√)(6)由于两构件接触,便限制了构件的某些独立运动。
(√)(7)为了定性的表述个构件间的相互关系,不按比例尺绘制的机构图形称为机构运动简图。
(×) (8)采用复合铰链,可以使机构工作起来省力。
(×)(9)机构采用局部自由度会影响机构的输出运动的自由度。
(×)(10)机构的自由度大于零是机构具有确定相对运动的必要条件。
(×)(11)为了定性的表述各构件间的相互关系,不按比例尺绘制的机构图形称为机构简图。
(√) (12)机构自由度数目就是机构杆组的数目。
(×)2填空:(1)2 个以上的构件以运动副联接构成的系统称为运动链。
(2)机构中输入运动的构件称为主动件。
(3)机构是由(主动件)、(从动件)和(机架)三部分组成。
(4)构件上参与接触的点、线、面称为运动副元素。
(5)移动副保留1个自由度。
(6)两构件组成平面高副时其运动简图中应画出两构件接触处的曲线轮廓。
(7)一个构件具有多个转动副时,则应在两条线交接处涂黑。
(8)机构是具有确定的相对运动的实物组合。
(9)作为平面运动构件的位置,可由三个独立参数来决定。
3名词解释:(1)机构运动简图(2).运动副:两构件接触而形成的可动联接称为运动副。
(3).转动副:允许构件作相对转动的运动副。
(4)移动副:允许构件作相对移动的运动副。
(5)..机构:一个构件固定并使另几个构件按给定的运动规律运动,这样的运动链构成机构。
(6).原动件:也称主动件,机构中按外部给定的运动规律运动的构件。
(7).高副:由两构件点接触或线接触构成的运动副。
(8).自由度:允许外部给与机构独立位置参数的数目。
《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l 0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
又如在该机构中改选EG 为原动件,试问组成此机构的基本杆组是否与前者有所不同。
解1)计算此机构的自由度110273)2(3=⨯-⨯='-'-+-=F p p p n F h l2)取构件AB 为原动件时 机构的基本杆组图为此机构为 Ⅱ 级机构3)取构件EG 为原动件时 此机构的基本杆组图为此机构为Ⅲ级机构平面机构的运动分析1、试求图示各机构在图示位置时全部瞬心的位置(用符号P直接标注在图上)。
ij2、在图a 所示的四杆机构中,AB l =60mm ,CD l =90mm ,AD l =BC l =120mm ,2ω=10rad/s ,试用瞬心法求:1) 当ϕ= 165时,点C 的速度C v;2) 当ϕ= 165时,构件3的BC 线上速度最小的一点E 的位置及其速度的大小;3)当C v=0 时,ϕ角之值(有两个解)。
解1)以选定的比例尺l μ作机构运动简图(图b )。
b)2)求C v,定出瞬心13P 的位置(图b ) 因13p 为构件3的绝对速度瞬心,则有:)/(56.278003.0/06.010132313s rad BP u l w l v w l AB BP B =⨯⨯=⋅==)/(4.056.252003.0313s m w CP u v l C =⨯⨯==3)定出构件3的BC 线上速度最小的点E 的位置因BC 线上速度最小之点必与13P 点的距离最近,故从13P 引BC 线的垂线交于点E ,由图可得:)/(357.056.25.46003.0313s m w E P u v l E =⨯⨯=⋅=4)定出C v=0时机构的两个位置(作于 图C 处),量出 ︒=4.261ϕ︒=6.2262ϕ c)3、在图示的机构中,设已知各构件的长度AD l =85 mm ,AB l =25mm ,CD l =45mm ,BC l =70mm ,原动件以等角速度1ω=10rad/s 转动,试用图解法求图示位置时点E 的速度E v 和加速度E a以及构件2的角速度2ω及角加速度2α。
a) μl =0.002m/mm解1)以l μ=0.002m/mm 作机构运动简图(图a )2)速度分析 根据速度矢量方程:CB B C v v v+= 以v μ=0.005(m/s)/mm 作其速度多边形(图b )。
b) a μ=0.005(m/s 2)/mm(继续完善速度多边形图,并求E v及2ω)。
根据速度影像原理,作BCE bce ∆∆~,且字母 顺序一致得点e ,由图得:)(31.062005.0s m pe v v E =⨯=⋅=μ)(25.207.0/5.31005.02s m l bc w BC v =⨯=⋅=μ(顺时针))(27.3045.0/33005.03s m l pc w CO v =⨯=⋅=μ(逆时针)3)加速度分析 根据加速度矢量方程: t CB n CB B t C n C C a a a a a a ++=+=以a μ=0.005(m/s 2)/mm 作加速度多边形(图c )。
(继续完善加速度多边形图,并求E a及2α)。
根据加速度影像原理,作BCE e c b ∆'''∆~,且字母顺序一致得点e ',由图得:)/(5.37005.02s m e p a a E =⨯=''⋅=μ)/(6.1907.0/5.2705.0/222s rad l C n l a a BC a BC tCB =⨯=''⋅==μ(逆时针)4、在图示的摇块机构中,已知AB l =30mm ,AC l =100mm ,BD l =50mm ,DE l =40mm ,曲柄以1ω=10rad/s 等角速度回转,试用图解法求机构在1ϕ= 45时,点D 和点E 的速度和加速度,以及构件2的角速度和角加速度。
解1)以l μ=0.002m/mm 作机构运动简图(图a )。
2)速度分析v μ=0.005(m/s)/mm 选C 点为重合点,有:?0//132322??大小?方向ABC C C B C B C l w BC BC AB v v v v v ⊥⊥+=+=以v μ作速度多边形(图b )再根据速度影像原理, 作BC BD bC bd =2,BDE bde ∆∆~,求得点d 及e , 由图可得)/(23.05.45005.0s m pd v v D =⨯==μ )/(173.05.34005.0s m pe v v E =⨯==μ)/(2122.0/5.48005.012s rad l bc w BC v =⨯==μ(顺时针)3)加速度分析a μ=0.04(m/s 2)/mm根据?20??//?323222132323222C C BCABrC C kC C C t B C n B C B C v w l w l w BC BC BC B C A B a a a a a a a 大小方向⊥⊥→→++=++=其中:49.0122.022222=⨯==BC n BC l w a7.035005.022232232=⨯⨯⨯==C C kC C v w a以a μ作加速度多边形(图c ),由图可得: )/(64.26604.02s m d p a a D =⨯=''⋅=μ )/(8.27004.02s m e p a a E =⨯=''⋅=μ)/(36.8122.0/5.2504.0122.0//22222s rad C n l a a a CB tB C =⨯=''==μ(顺时针)5、在图示的齿轮-连杆组合机构中,MM 为固定齿条,齿轮3的齿数为齿轮4的2倍,设已知原动件1以等角速度1ω顺时针方向回转,试以图解法求机构在图示位置时,E点的速度E v及齿轮3、4的速度影像。
解1)以l μ作机构运动简图(图a ) 2)速度分析(图b )此齿轮-连杆机构可看作为ABCD 及DCEF 两 个机构串连而成,则可写出CB B C v v v +=EC C E v v v +=取v μ作其速度多边形于图b 处,由图得 )/(s m pe v v E μ=取齿轮3与齿轮4啮合点为K ,根据速度影像原来,在速度图图b 中,作DCKdck ∆∆~求出k 点,然后分别以c 、e 为圆心,以ck 、ek 为半径作圆得圆3g 及圆4g 。
求得pe v v E ⨯=μ 齿轮3的速度影像是3g 齿轮4的速度影像是4g6、在图示的机构中,已知原动件1以等速度1ω=10rad/s 逆时针方向转动,ABl =100mm ,BC l =300mm ,e =30mm 。
当1ϕ=50、 220时,试用矢量方程解析法求构件2的角位移2θ及角速度2ω、角加速度2α和构件3的速度3v和加速度3α。
解取坐标系xA y ,并标出各杆矢量及方位角如图所示: 1)位置分析 机构矢量封闭方程)(321a es l l+=+分别用i和j 点积上式两端,有)(sin sin cos cos 221132211b e l l s l l ⎭⎬⎫=+=+θϕθϕ故得:]/)sin arcsin[(2112l l e ϕθ-=)(cos cos 22113c l l s θϕ+=2)速度分析 式a 对时间一次求导,得 )(3222111d i v e w l e w l t t=+上式两端用j点积,求得:)(cos /cos 221112e l w l w θϕ-=式d )用2e点积,消去2w ,求得 )(cos /)sin(221113f w l v θθϕ--=3)加速度分析 将式(d )对时间t 求一次导,得:)(322222221211g ia e w l e l e w l nt n =++α用j点积上式的两端,求得:)(cos ]sin sin [22222212112h l w l w l a θθϕ+-=用2e点积(g ),可求得:)(cos ])cos([2222212113i w l w l a θθϕ+--=7、在图示双滑块机构中,两导路互相垂直,滑块1为主动件,其速度为100mm/s ,方向向右,AB l =500mm ,图示位置时A x =250mm 。