第四章 线性系统的根轨迹法(二)
- 格式:pdf
- 大小:1.43 MB
- 文档页数:37
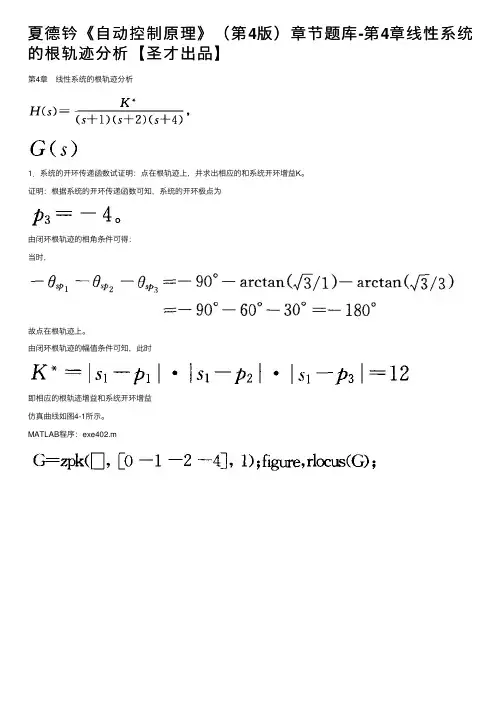
夏德钤《⾃动控制原理》(第4版)章节题库-第4章线性系统的根轨迹分析【圣才出品】第4章 线性系统的根轨迹分析1.系统的开环传递函数试证明:点在根轨迹上,并求出相应的和系统开环增益K。
证明:根据系统的开环传递函数可知,系统的开环极点为由闭环根轨迹的相⾓条件可得:当时,故点在根轨迹上。
由闭环根轨迹的幅值条件可知,此时即相应的根轨迹增益和系统开环增益仿真曲线如图4-1所⽰。
MATLAB程序:exe402.m2.设单位反馈控制系统的开环传递函数为试⽤解析法绘出K*从零变到⽆穷时的闭环根轨迹图,并判断下列点是否在根轨迹上:(﹣2+j0),(0+j1),(﹣3+j2)解:闭环传递函数为则闭环特征⽅程为闭环特征根为当。
可逐个描点得闭环根轨迹如图4-2所⽰,从图4-2中明显可见,只有(-2,j0)在根轨迹上。
图4-23.设单位反馈控制系统的开环传递函数如下,试概略绘制闭环根轨迹图。
解:(1)系统的开环传递函数令为根轨迹增益。
①实轴上的根轨迹:[0,-2],[-5,-∞)。
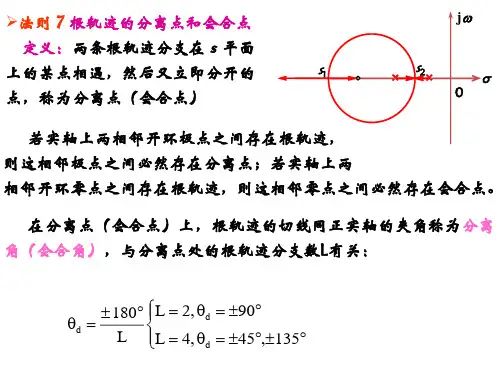
②根轨迹的渐近线:③根轨迹的分离点:根轨迹的分离点坐标满⾜解得④根轨迹与虚轴的交点:由系统的开环传递函数可知系统的闭环特征⽅程令s=jω,将其代⼊上式可得即由于ω≠0,故可解得则根轨迹与虚轴的交点为±j3.16。
根据以上⼏点,可以画出概略根轨迹如图4-3所⽰。
图4-3 系统(1)概略根轨迹图(2)系统的开环传递函数①实轴上的根轨迹[0,-2],[-3,-5]。
③根轨迹的分离点:根轨迹的分离点坐标满⾜通过试凑可得d=-0.89。
根据以上⼏点,可以画出概略根轨迹如图4-4所⽰。
图4-4 系统(2)概略根轨迹图(3)系统的开环传递函数①实轴上的根轨迹:[-1,-3],[-10,-5]。
②根轨迹的渐近线:③根轨迹的分离点:根轨迹的分离点坐标满⾜通过试凑可得d=-7.27。
根据以上⼏点,可以画出概略根轨迹如图4-5所⽰。
图4-5 系统(3)概略根轨迹图(4)系统的开环传递函数实轴上的根轨迹为[-2,-1],系统概略根轨迹如图4-6所⽰。