实验阻尼振动与受迫振动
- 格式:doc
- 大小:34.00 KB
- 文档页数:3
【实验目的】1.观测阻尼振动,学习测量振动系统基本参数的方法。
2.研究受迫振动的幅频特性和相频特性,观察共振现象。
3.观察不同阻尼对受迫振动的影响。
【实验原理】当摆轮受到周期性强迫外力矩t M M ωcos 0=的作用,并在有空气阻尼的媒质中运动时(阻尼力矩为 ),其运动方程为t M dt d b k dtd J ωθθθcos 022+--= (1)其中,J 为摆轮的转动惯量,θk -为弹性力矩,0M 为强迫力矩的幅值,ω为强迫力的圆频率。
令J k =20ω,J b=β2,JM m 0=,则(1)式变为 t m dt d dtd ωθωθβθcos 22022=++ (2) 其中,β为阻尼系数,0ω为系统的固有频率,m 为强迫力矩。
当0cos =t m ω时,(2)式即为阻尼振动方程,当0=β,即在无阻尼情况时,(2)式变为简谐振动方程。
方程(2)的通解为()()0201cos cos ϕωθαωθθβ+++=-t t e t (3)由(3)式可见,受迫振动可分为两部分:第一部分,()αωθβ+-t e t 01cos 表示阻尼振动,经过一定时间后衰减消失。
第二部分,说明强迫力矩对摆轮作功,向振动体传递能量,最后达到一个稳定的振动状态,其振幅为()22222024ωβωωθ+-=m(4)它与强迫力矩之间的相位差ϕ为()2022022012T T T T tg -=-=-πβωωβωϕ (5) 由(4)式和(5)式可看出,振幅2θ与相位差ϕ的数值取决于强迫力矩m 、频率ω、固有频率0ω和阻尼系数β四个因素,而与振动起始状态无关。
由()[]04222220=+-∂∂ωβωωω极值条件可得出,当受迫力的圆频率2202βωω-= 时产生共振,θ有极大值。
若共振时的圆频率和振幅分别用r ω 、r θ表示,则dtd b θ-2202βωω-=r (6)2222βωβθ-=m r (7)(6)式和(7)式表示,阻尼系数β越小,共振时圆频率越接近于系统固有频率,振幅也越大。
阻尼振动与强迫振动的区别与联系引言:振动现象广泛存在于自然界和工程领域中。
阻尼振动和强迫振动作为振动现象的两种基本形式,它们在物理特性、引起原因和动力学特征等方面存在一定的区别和联系。
本文将着重讨论阻尼振动与强迫振动的区别与联系,以深入了解这两种振动形式的本质。
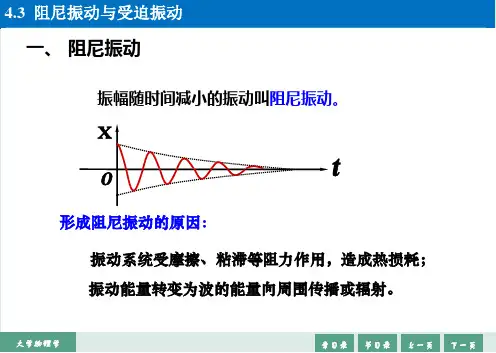
一、阻尼振动的定义与特点阻尼振动是指受到阻尼力作用下的振动现象。
在阻尼振动中,振动系统受到阻尼力的耗散作用,会导致振幅的逐渐减小,直至 eventually下降为零。
阻尼振动的物理特性主要包括振动频率的减小、振幅的衰减和振动系统能量的损失。
二、强迫振动的定义与特点强迫振动是指在外界作用下,振动系统受到周期性或非周期性的外力驱动,并由此产生的振动现象。
与阻尼振动不同,强迫振动在无外力驱动时不会自发发生。
强迫振动的物理特性主要包括受迫振动频率与外力频率的一致性、振幅的稳定性和外界驱动力对振动系统的影响。
三、阻尼振动与强迫振动的区别1. 物理特性:阻尼振动主要表现为能量的衰减和振幅的逐渐减小,而强迫振动的振幅较为稳定,受迫振动频率与外力频率一致。
2. 引起原因:阻尼振动产生的主要原因是振动系统与环境介质之间的相互作用,而强迫振动则是由外界施加的外力引起的。
3. 频率依赖性:阻尼振动的频率与外界没有直接的关系,而强迫振动的频率受外界驱动力的影响,与外力频率保持一定的一致性。
4. 能量耗散:阻尼振动会因阻尼力的作用逐渐损失能量,而强迫振动的振动系统能量主要来自外界驱动力。
四、阻尼振动与强迫振动的联系1. 泛化关系:强迫振动可以看作是阻尼振动的一种特殊情况,当外界驱动力的频率趋近于阻尼振动系统的固有频率时,强迫振动会逐渐趋近于稳定状态。
2. 共存关系:在实际物理系统中,阻尼振动与强迫振动可以同时存在。
外界施加的强迫力可能使阻尼振动系统产生共振现象,引起系统的不稳定性。
3. 相互影响:阻尼振动和强迫振动之间存在着相互影响关系。
阻尼振动的存在会导致强迫振动的振幅逐渐减小,而强迫振动的存在也会影响阻尼振动系统的能量耗散。
利用波尔共振仪研究受迫振动实验报告一、实验目的1、观察摆轮的自由振动、阻尼振动和受迫振动现象。
2、研究不同阻尼力矩对受迫振动的影响,并测定阻尼系数。
3、研究受迫振动的幅频特性和相频特性,观察共振现象,测定受迫振动的共振频率和共振振幅。
二、实验仪器波尔共振仪,包括振动系统、电磁阻尼系统、电机驱动系统、光电计数系统和智能控制仪等部分。
三、实验原理1、自由振动无阻尼的自由振动方程为:$m\frac{d^2\theta}{dt^2}=k\theta$,其中$m$为摆轮的转动惯量,$k$为扭转弹性系数,$\theta$为角位移。
其解为:$\theta = A\cos(\omega_0 t +\varphi)$,其中$\omega_0 =\sqrt{\frac{k}{m}}$为固有角频率,$A$和$\varphi$为初始条件决定的常数。
2、阻尼振动考虑阻尼时,振动方程为:$m\frac{d^2\theta}{dt^2} +b\frac{d\theta}{dt} + k\theta = 0$,其中$b$为阻尼系数。
根据阻尼的大小,可分为三种情况:小阻尼:$\omega =\sqrt{\omega_0^2 \frac{b^2}{4m^2}}$,振动逐渐衰减。
临界阻尼:振动较快地回到平衡位置。
大阻尼:不产生振动。
3、受迫振动在周期性外力矩$M = M_0\cos\omega t$作用下,振动方程为:$m\frac{d^2\theta}{dt^2} + b\frac{d\theta}{dt} + k\theta =M_0\cos\omega t$。
稳定时,振动的角位移为:$\theta = A\cos(\omega t +\varphi)$,其中振幅$A =\frac{M_0}{\sqrt{(k m\omega^2)^2 +(b\omega)^2}}$,相位差$\varphi =\arctan\frac{b\omega}{k m\omega^2}$。

机械振动中的阻尼振动与受迫振动在机械系统中,振动是一种普遍存在的现象,它包含着阻尼振动和受迫振动两种类型。
阻尼振动是指系统在一定的阻尼作用下运动的周期性减弱振动,而受迫振动是指系统受到外部力的作用而发生周期性振动。
本文将探讨机械振动中的阻尼振动和受迫振动的特点及其应用。
一、阻尼振动阻尼振动是指振动系统在受到阻力的作用下产生的振动。
阻尼力可以分为粘性阻尼、干摩擦阻尼和液体摩擦阻尼等不同形式。
阻尼振动的特点是振幅逐渐减小,振动频率也逐渐减小。
阻尼振动的主要原因是能量的损失。
当机械系统受到阻尼力的作用时,振动系统的机械能会逐渐转化为热能而损失。
这导致振动幅度逐渐减小,最终停止振动。
例如,摆钟在受到空气阻力的影响下,其摆动幅度会逐渐减小,最终停止。
阻尼振动的应用广泛。
在机械工程中,阻尼振动常常被用于减震和能量吸收的装置设计。
例如,在车辆的悬挂系统中使用减震器,可以有效地缓解车辆行驶中的颠簸感。
同时,阻尼振动还常用于物体的减振和抗震设计,例如建筑物中的隔震装置。
二、受迫振动受迫振动是指振动系统在外部力的作用下产生的振动。
外力可以是周期性的,也可以是非周期性的。
受迫振动的特点是振幅和频率与外力的频率相关。
外力对振动系统的影响可以分为共振和强迫两种情况。
共振是指外力的频率接近或等于振动系统的固有频率时,振动幅度会显著增大。
强迫是指外力的频率与振动系统的固有频率有一定的差别,但仍然能引起系统振动。
受迫振动在实际生活中有许多应用。
例如,在音乐中,乐器的共振现象使得乐器能够产生特定的音调。
另外,受迫振动还在工程领域中有着广泛的应用,如振动筛、振动输送机等。
它们利用外力作用产生振动,以完成特定的分选和输送任务。
三、阻尼振动与受迫振动的关系阻尼振动与受迫振动是机械振动中两种常见的振动类型,它们在某些情况下可以相互转化。
当受迫振动系统存在阻尼时,会产生阻尼振动。
此时,外力的频率与振动系统的固有频率相同或接近时,阻尼振动的幅度会受到外力的影响,产生共振效应。
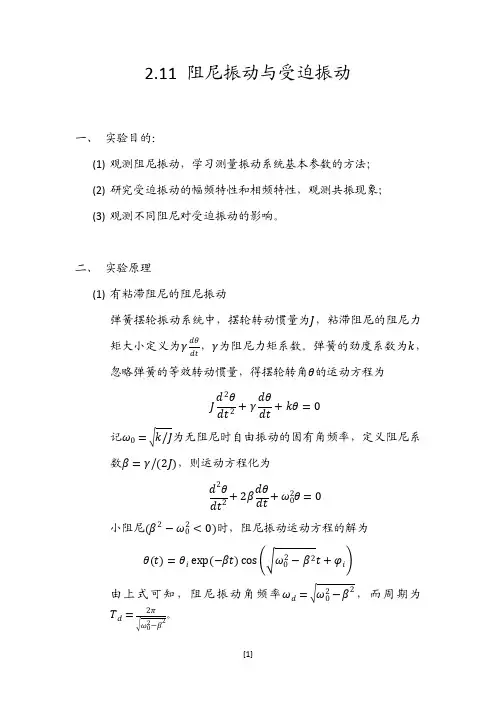
《阻尼振动与受迫振动》实验报告工程物理系核41 崔迎欢 2014011787一.实验名称:阻尼振动与受迫振动二.实验目的1.观测阻尼振动,学习测量振动系统基本参数的方法;2.研究受迫振动的幅频特性和相频特性,观察共振现象;3.观测不同阻尼对受迫振动的影响。
三..实验原理1.有粘滞阻尼的阻尼振动弹簧和摆轮组成一振动系统,设摆轮转动惯量为J,粘滞阻尼的阻尼力矩大小定义为角速度dθ/dt与阻尼力矩系数γ的乘积,弹簧劲度系数为k,弹簧的反抗力矩为-kθ。
忽略弹簧的等效转动惯量,可得转角θ的运动方程为记ω0为无阻尼时自由振动的固有角频率,其值为ω0=,定义阻尼系数β=γ/(2J),则上式可以化为:小阻尼即时,阻尼振动运动方程的解为(*)由上式可知,阻尼振动角频率为,阻尼振动周期为2.周期外力矩作用下受迫振动的解在周期外力矩Mcosωt激励下的运动方程和方程的通解分别为这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。
一般t>>τ后,就有稳态解稳态解的振幅和相位差分别为其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。
3.电机运动时的受迫振动运动方程和解弹簧支座的偏转角的一阶近似式可以写成式中αm是摇杆摆幅。
由于弹簧的支座在运动,运动支座是激励源。
弹簧总转角为。
于是在固定坐标系中摆轮转角θ的运动方程为也可以写成于是得到由θm的极大值条件可知,当外激励角频率时,系统发生共振,θm有极大值。
引入参数,称为阻尼比。
于是,我们得到四.实验仪器:波耳振动仪五.实验步骤。
1.打开电源开关,关断电机和闪光灯开关,阻尼开关置于“0”档,光电门H、I可以手动微调,避免和摆轮或者相位差盘接触。
手动调整电机偏心轮使有机玻璃转盘F上的0位标志线指示0度,亦即通过连杆E和摇杆M使摆轮处于平衡位置。
染货拨动摆轮使偏离平衡位置150至200度,松开手后,检查摆轮的自由摆动情况。
正常情况下,振动衰减应该很慢。
清华大学实验报告工程物理系工物40 钱心怡 2014011775实验日期:2015年3月3日一.实验名称阻尼振动和受迫振动二.实验目的1.观测阻尼振动,学习测量振动系统参数的基本方法2.研究受迫振动的频幅特性和相频特性,观察共振现象3.观察不同阻尼对振动的影响三.实验原理1.阻尼振动在转动系统中,设其无阻尼时的固有角频率为ω0,并定义阻尼系数β其转动的角度与时间的关系满足如下方程解上述方程可得当系统处于弱阻尼状态下时,即β<ω0时,θ和t满足如下关系解得阻尼振动角频率为ωd=,阻尼振动周期为T d=同时可知lnθ和t成线性关系,只要能通过实验数据得到二者之间线性关系的系数,就可以进一步解得阻尼系数和阻尼比。
2.周期性外力作用下的受迫振动当存在周期性外力作用时,振动系统满足方程θ和t满足如下关系:该式中的第一项随着时间t的增大逐渐趋于0,因此经过足够长时间后,系统在外力作用下达到平衡,第一项等于0,在该稳定状态下,系统的θ和t满足关系:其中;(θ∈(0,π)) 3.电机运动时的受迫振动当波尔共振仪的长杆和连杆的长度远大于偏心轮半径时,当偏心轮电机匀速转动时,设其角速度为ω,此时弹簧的支座是弹簧受迫振动的外激励源,摆轮转角满足以下方程:即为与受周期性外力矩时的运动方程相同,即有可知,当ω=ω0时φ最大为,此时系统处于共振状态。
四.主要实验仪器和实验步骤1.实验仪器波尔共振仪主要由振动系统和提供外激励的两个部分组成。
振动系统包括弹簧和摆轮。
弹簧一端固定在摇杆上。
摆轮周围有一圈槽型缺口,其中有一个长缺口在平衡时对准光电门。
右侧的部分通过连杆向振动装置提供外激励,其周期可进行调节。
上面的有机玻璃盘随电机一起转动。
当摆轮转到平衡位置时,闪光灯闪烁,照亮玻璃盘上的白色刻度线,其示数即为在外激励下摆轮转动时落后于电动机的相位。
2.实验步骤(1)调整仪器打开电源并断开电机和闪光灯的开关。
阻尼调至0档。
手动调整电机的偏心轮使其0标志线与0度刻线对齐。
阻尼振动与受迫振动●阻尼振动●受迫振动●共振1.阻尼振动实例a. 阻尼弹簧振子,阻力γγ其中。
实例b. RLC谐振电路或写作其中。
分析:引入阻尼将引起能量的减小,计算能量改变率,β(等于阻尼做功的功率)。
如果很小,基本上还是简谐振动,但由于能量消耗,振幅会逐渐减小,解的形式近似为:能量,β一个周期内能量的消耗率:其中称为品质因数(quality factor),简称值(Q factor)。
从数量级上讲,Q值就是把储存的能量衰减完,振子中能够振荡的次数。
(注:RLC谐振电路,)精确解:(a)弱阻尼()其中。
与近似分析的结果相比,只是频率有所减小。
(b)过阻尼()其中。
无振荡,呈指数衰减。
注意是的减函数,衰减速度随增大反而减慢。
(c)临界阻尼(),无振荡,但衰减最快。
2.受迫振动实例a. 驱动弹簧振子γ实例b. RLC串联电路非齐次线性方程解的一般形式:其中是原方程的一个解(称为特解),是齐次方程的任意解。
写成复数形式,令满足方程则满足方程令,其中所以可取称为稳态解,而把称为暂态解。
3.共振为简单起见,只讨论速度共振。
的振幅为性质:(1)驱动频率与固有频率相等()时,时速度振幅(或平均动能)最大,出现共振。
(2)共振时,速度与驱动力同相位,驱动一直做正功。
(3)驱动频率与固有频率相差越大,振幅(动能)越小,形成一个共振峰。
(4)Q值越大,共振峰越高,同时也越窄(对驱动频率的选择性越高)。
共振的应用:乐器、无线电接收、调Q激光、核磁共振与电子自旋共振等。
共振有时会造成破坏,需要避免。
阻尼振动与受迫振动振动是自然界中普遍存在的一种现象,它在物理学、工程学等领域中具有重要的应用价值。
而阻尼振动和受迫振动是振动学中两个重要的概念。
阻尼振动是指在振动系统中存在摩擦或阻力的情况下所产生的振动。
当一个物体受到外力作用而开始振动时,若存在阻尼,振动的幅度将逐渐减小,最终停止。
这种振动方式在日常生活中很常见,例如钟摆摆动时逐渐停下来的过程。
阻尼振动的特点是振幅逐渐减小,振动频率不变。
这是因为阻尼力与振动速度成正比,而速度越大,阻尼力就越大。
因此,振动系统在受到外力作用后,振幅将逐渐减小,直到最终停止振动。
与阻尼振动相对应的是受迫振动,它是指在外力作用下振动系统发生的振动。
受迫振动的特点是振幅随时间的变化而发生周期性的变化,振幅的变化与外力的频率和振幅有关。
受迫振动的一个重要应用是共振现象。
当外力的频率与振动系统的固有频率相等时,共振现象会发生。
在共振状态下,振幅将达到最大值,这是因为外力与系统的振动频率相同,能够为系统提供持续的能量输入,从而使振幅增大。
阻尼振动和受迫振动经常在实际工程中应用。
例如,在汽车悬挂系统中,为了提高乘坐舒适性,往往会采用阻尼装置来减小车身的振动。
而在建筑工程中,为了避免共振现象对建筑物产生破坏性影响,工程师们会根据建筑物的固有频率来设计结构。
除了工程领域,阻尼振动和受迫振动也在物理学和生物学中有广泛的应用。
例如,在电子学中,阻尼振动可以用于减小电路的振荡幅度;在生物学中,研究细胞的振动特性有助于了解细胞的结构和功能。
总之,阻尼振动和受迫振动是振动学中的两个重要概念。
阻尼振动是指在存在阻力或摩擦力的情况下发生的振动,振幅逐渐减小;而受迫振动是指在外力作用下发生的振动,振幅随时间的变化而发生周期性变化。
这两种振动方式在实际应用中具有重要意义,对于理解和应用振动学理论有着重要的作用。
实验十六 玻尔共振振动是物理学中一种重要的运动,是自然界最普遍的运动形式之一。
振动可分为自由振动(无阻尼振动)、阻尼振动和受迫振动.振动中物理量随时间做周期性变化,在工程技术中,最多的是阻尼振动和受迫振动,及由受迫振动所导致的共振现象。
共振现象一方面对建筑物有破坏作用,另一方面却有许多实用价值能为我们所用。
如利用共振原理设计制作的电声器件,利用核磁共振和顺磁共振研究物质的结构等。
本实验用波耳共振仪研究阻尼振动和受迫振动的特性. [实验目的]1.观察阻尼振动,研究波尔共振仪中弹性摆轮受迫振动的幅频特性和相频特性. 2.观察共振现象,研究不同阻尼力矩对受迫振动的影响. 3。
学习闪频法测定运动物体的定态物理量——相位差. [实验原理]当一个物体在持续的周期性外力作用下发生振动时,称为受迫振动,周期性外力称为强迫力。
若周期性外力按简谐振动规律变化的,则这种受迫振动也是简谐振动。
在稳定状态,振幅恒定不变,振幅大小与强迫力的频率、振动系统的固有振动频率及阻尼系数有关.振动系统同时受到阻尼力和强迫力作用,作受迫振动.在稳定状态时物体的位移、速度变化与强迫力变化相位不同,有一个相位差。
当强迫力频率与振动系统固有频率相同时会产生共振,此时相位差90º,振幅最大.波尔共振仪的摆轮在弹性力矩作用下作自由摆动,在电磁阻尼力矩作用下产生阻尼振动。
通过观察周期性强迫力阻尼振动,可以研究波尔共振仪中弹性摆轮受迫振动幅频特性和相频特性,以及不同阻尼力矩对受迫振动的影响。
设周期性强迫力矩:t M ωcos 0;电磁和空气阻尼力矩:dtd b θ-;振动系统的弹性力矩:θk -.则摆轮的运动方程为:t M dt d k dtd J o ωθθθcos b 22+--=(16 -1)式中J 为摆轮的转动惯量,令JM m J bJ k o ===,2,2βω,o ω、β和m 分别称固有频率、阻尼系数和强迫力矩.则式(15—1)变为t m dt d dtd o ωθωθβθcos 2222=++(16—2) 此式称为阻尼振动方程,其解为:)cos()cos(21o f t t t e ϕωθαωθθβ+++=-(16—3)由此式可见,受迫振动由两部分组成:① 阻尼振动:)cos(1αωθβ+-t e f t ,此阻尼振动经过一定时间后将衰减消失. ②强迫振动:)cos(2o t ϕωθ+,频率为ω的强迫力矩作用在摆轮上,最后达到稳定状态.摆轮的振幅2222224)(ωβωωθ+-=om(16—4)摆轮的振动与强迫力的相位差)(tan 2tan 202201221T T T T o -=-=--πβωωβωϕ(16—5) 相位差ϕ取值范围为:πϕ<<0,反映了摆轮振动滞后于激励源振动。