机车速度传感器的检测与故障诊断
- 格式:doc
- 大小:355.50 KB
- 文档页数:12
数控机床控制系统中的传感器介绍摘要:由于高精度、高速度、高效率及安全可靠的特点,数控系统在装备制造业中的应用越来越广泛,数控机床是一种装有程序控制系统的自动化机床,能够根据已编好的程序,使机床动作并加工零件。
它综合了机械、自动化、计算机、测量等最新技术,使用了多种传感器,本文从位移、位置、速度、压力、温度以及刀具磨损监控等方面论述了在数控机床控制系统中用到的传感器。
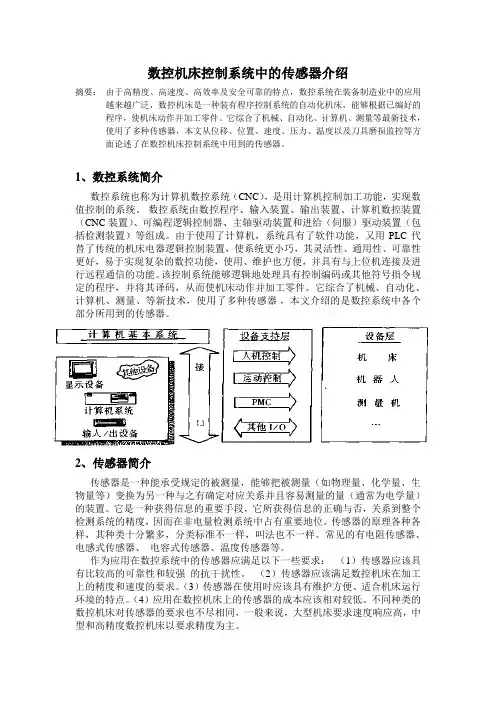
1、数控系统简介数控系统也称为计算机数控系统(CNC),是用计算机控制加工功能,实现数值控制的系统。
数控系统由数控程序、输入装置、输出装置、计算机数控装置(CNC装置)、可编程逻辑控制器、主轴驱动装置和进给(伺服)驱动装置(包括检测装置)等组成。
由于使用了计算机,系统具有了软件功能,又用PLC代替了传统的机床电器逻辑控制装置,使系统更小巧,其灵活性、通用性、可靠性更好,易于实现复杂的数控功能,使用、维护也方便,并具有与上位机连接及进行远程通信的功能。
该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作并加工零件。
它综合了机械、自动化、计算机、测量、等新技术,使用了多种传感器,本文介绍的是数控系统中各个部分所用到的传感器。
2、传感器简介传感器是一种能承受规定的被测量,能够把被测量(如物理量、化学量、生物量等)变换为另一种与之有确定对应关系并且容易测量的量(通常为电学量)的装置。
它是一种获得信息的重要手段,它所获得信息的正确与否,关系到整个检测系统的精度,因而在非电量检测系统中占有重要地位。
传感器的原理各种各样,其种类十分繁多,分类标准不一样,叫法也不一样。
常见的有电阻传感器、电感式传感器、电容式传感器、温度传感器等。
作为应用在数控系统中的传感器应满足以下一些要求:(1)传感器应该具有比较高的可靠性和较强的抗干扰性。
(2)传感器应该满足数控机床在加工上的精度和速度的要求。
(3)传感器在使用时应该具有维护方便、适合机床运行环境的特点。
电力机车牵引电机故障检测诊断方法概述摘要:研究有效的牵引电机故障检测及诊断技术对于保障行车安全具有重要意义。
首先对电力机车牵引电机常见故障及其原因进行了分析,随后介绍了各类故障的传统诊断方法及智能诊断方法,最后比较了传统方法及智能诊断方法的区别并对智能诊断的实际应用进行了展望。
关键词:牵引电机;故障;智能诊断1.牵引电机常见故障根据牵引电机故障的来源不同可以将故障分为机械故障和电气故障两类。
电气类故障包括定子绕组故障、定子铁芯故障、转子故障等,机械类故障指轴承故障[3]。
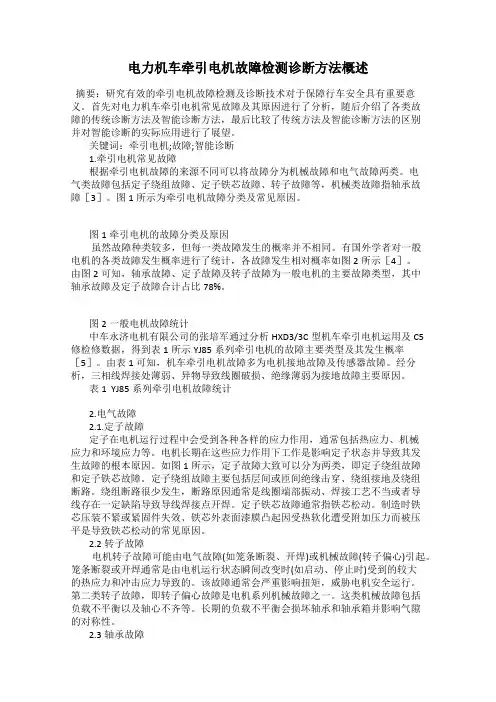
图1所示为牵引电机故障分类及常见原因。
图1牵引电机的故障分类及原因虽然故障种类较多,但每一类故障发生的概率并不相同。
有国外学者对一般电机的各类故障发生概率进行了统计,各故障发生相对概率如图2所示[4]。
由图2可知,轴承故障、定子故障及转子故障为一般电机的主要故障类型,其中轴承故障及定子故障合计占比78%。
图2一般电机故障统计中车永济电机有限公司的张培军通过分析HXD3/3C型机车牵引电机运用及C5修检修数据,得到表1所示YJ85系列牵引电机的故障主要类型及其发生概率[5]。
由表1可知,机车牵引电机故障多为电机接地故障及传感器故障。
经分析,三相线焊接处薄弱、异物导致线圈破损、绝缘薄弱为接地故障主要原因。
表1 YJ85系列牵引电机故障统计2.电气故障2.1.定子故障定子在电机运行过程中会受到各种各样的应力作用,通常包括热应力、机械应力和环境应力等。
电机长期在这些应力作用下工作是影响定子状态并导致其发生故障的根本原因。
如图1所示,定子故障大致可以分为两类,即定子绕组故障和定子铁芯故障。
定子绕组故障主要包括层间或匝间绝缘击穿、绕组接地及绕组断路。
绕组断路很少发生,断路原因通常是线圈端部振动、焊接工艺不当或者导线存在一定缺陷导致导线焊接点开焊。
定子铁芯故障通常指铁芯松动。
制造时铁芯压装不紧或紧固件失效、铁芯外表面漆膜凸起因受热软化遭受附加压力而被压平是导致铁芯松动的常见原因。
东风8B型机车检修和运用中微机系统故障判断与处理吴雄勇发布时间:2021-09-02T08:42:49.983Z 来源:《中国科技人才》2021年第17期作者:吴雄勇刘涛[导读] DF8B型内燃机车作为我国铁路主型重载货物列车的牵引机车,随着科学技术的进步,机车电气控制设备不断更新和完善,特别是微机控制系统的运用具有功能齐全、控制效果好、功能易于扩展等特点,极大提高了机车的性能,而且降低了运行费用。
中车戚墅堰机车有限公司江苏常州 213011摘要:DF8B型内燃机车作为我国铁路主型重载货物列车的牵引机车,随着科学技术的进步,机车电气控制设备不断更新和完善,特别是微机控制系统的运用具有功能齐全、控制效果好、功能易于扩展等特点,极大提高了机车的性能,而且降低了运行费用。
本文通过对DF8B机车运用中典型微机故障进行分析,并提供了判断和处理方法,为广大机车检修试验人员提供参考。
关键词:DF8B;微机控制;故障分析;处理方法概述:微机柜设置在机车电器间与机械间靠电器间右侧墙壁上,微机系统控制通过五只插件插头接口对外进行输入、输出信号控制。
用于微机系统系统在机车上的控制有多种类型,本文主要介绍用于DF8B型内燃机车的ZY5000-2这种型号的微机故障判断与处理的方法。
微机系统检修及运用中的注意事项:1.在连接或卸下本微机柜之前必须断开如下开关(1)蓄电池闸刀和微机电源开关(2)机控开关2K2.更换插件时必须采取如下措施:(1)严禁带电插拔任何插件;(2)在拔出插件之前,手先摸一下接地外壳;(3)拆下插件需放在静电屏蔽袋内。
3.必须戴上接地手镯才能触摸元器件。
4.非专业或未经培训的人员严禁打开机箱。
5.机车在进行绝缘耐压试验时必须将微机柜5只插头脱开,以防止强电侵入微机柜造成微机柜不可恢复的故障。
一、DF8B微机系统检修中的故障处理方法如下:1.如总控开关合闸后,微机控制柜不工作,则可通过电源插件面板上的插孔进行检查。

—62—试验检测JZT-1机车走行部状态监测及故障诊断系统封力民(广州铁路(集团)公司机务处, 广东广州510088)收稿日期:2007-01-17作者简介:封力民(1964-),男,高级工程师,现从事机车技术管理工作。
摘要:介绍了JZT-1机车走行部状态监测及故障诊断系统的构成和技术特点。
经试验和运用表明,系统工作稳定可靠,其采用的故障诊断智能决策方法极大地提高了预报的准确度。
关键词:机车走行部;故障诊断;小波变换;智能决策;地面分析中图分类号:U296.32+2;U260.33 文献标识码:A 文章编号:1000-128X(2007)03-0062-03机 车 电 传 动ELECTRIC DRIVE FOR LOCOMOTIVES №3, 2007May10, 2007 2007年第3期 2007年5月10日0引言机车轮对、轴箱轴承和牵引电动机的轴承是机车走行部行车安全的最关键的部分。
随着列车的不断提速和全周转公里的增加, 其安全隐患更加突出,机车走行部的可靠性变得尤为重要。
近几年,铁道部门在这方面作了大量的工作,如在机车上安装机车轴承温度监测报警装置等,有效地防止了多起事故的发生。
但是轴承温度检测有一定的局限性, 走行部产生故障后往往不首先表现在发热,故不能及时发现和早期诊断故障。
为此开发的JZT-1型机车走行状态监测装置及故障诊断系统(以下简称“系统”),可以及时发现故障,最大限度地防止热切事故的发生。
系统从识别现状、预测未来两方面着手,通过检测轴承温度及振动信号对轴承状态进行辨识。
它采用在线监测报警方式,数据自动检测并保存, 然后转储至地面,建立历史档案,通过对相应数据的分析,得到故障趋势曲线,为运用部门识别早期故障服务,为检修维护、设计和制造的研究改进提供依据。
1系统组成系统由传感器、接线盒、监测装置 、显示器、转储Monitor and Failure Diagnosis System of Locomotive Running Gear for JZT-1FENGLi-min(Locomotive Department , Guangzhou Railway Grop Company, Guangzhou, Guangdong 510088, China)Abstract: The construction and technical characteristics are described for the monitor and failure diagnosis system of locomotive running gear for JZT-1. The tests and operations indicate that the system work stably and reliably. The intelligent decision-making method adopted for failure diagnosis greatly improves the forecast correctness.Key words: locomotive running gear; failure diagnosis; wavelet transform; intelligent decision-making; data analysis器、地面分析诊断软件等部分组成。
第六篇机车故障检测及处理1. 机车电气系统SS3B型固定重联机车设有各种故障检测保护装置。
并且在司机操纵台上安装了微机显示屏,在司机操纵台电表模块下方设置了故障信号显示屏,以监视各部件的动作状态和显示故障内容。
微机显示屏的显示内容请参考该装置的使用说明书。
1.1 常见故障与处理1.1.1 受电弓升不起1)故障原因(1)保护阀BHF及门联锁风路不通。
(2)门联锁重联安全风压继电器515KF不动作。
2)故障处理(1)疏通电路及风路。
(2)对他节车的515KF进行处理,如果在运行过程中,受电弓开关1SDFK打“单机”位:只升本节车,切除他节车,维持运行。
1.1.2 主断路器不闭合1)故障原因(1)司控器不在零位。
(2)劈相机按键在合位。
(3)主断电磁阀线圈坏。
2)故障处理(1)确认两个司机室的司控器都在零位。
(2)确认劈相机按键在打开位。
1.1.3 主断路器不能保持闭合1)故障原因(1)主断路器保持线圈坏。
(2)主断路器控制部分坏或连接器脱线。
2)故障处理对上述相应情况进行具体处理,(在运行中应加强走廊巡视,过绝缘分段区时采用降弓的方法通过,回段后进行处理)。
1861.1.4 “预备”信号灯不灭1)故障原因(1)两位置转换开关辅助接点不良,或转换没完成。
(2)劈相机没工作。
(3)主断没合上。
(4)位置转换在制动位而风机没工作。
2)故障处理(1)确认两位置转换到位。
(2)使劈相机工作。
(3)使主断合上。
(4)使风机工作或隔离相应环节。
引起此故障的原因可能会来自很多方面,所以故障的处理必须根据实际情况进行灵活处理。
1.1.5 高压瓷瓶放电击穿跳闸更换高压瓷瓶,如果在运行中,切除相应一节机车维持运行到段处理。
1.1.6 102QA脱扣,网压消失降下受电弓,断开主断路器,重合102QA,再试。
1.1.7 原边过流当原边过流继电器YGJ经电流互感器检测到原边过流而动作时,导致分断主断。
按电路图查清原边过流原因,处理后再试。
传感器原理及检测技术传感器技术是测量技术、半导体技术、计算机技术、信息处理技术、微电⼦学、光学、声学、精密机械、仿⽣学和材料科学等众多学科相互交叉的综合性和⾼新技术密集型前沿技术之⼀,是现代新技术⾰命和信息社会的重要基础,是⾃动检测和⾃动控制技术不可缺少的重要组成部分。
⽬前,传感器技术已成为我国国民经济不可或缺的⽀柱产业的⼀部分。
传感器在⼯业部门的应⽤普及率⼰被国际社会作为衡量⼀个国家智能化、数字化、⽹络化的重要标志。
传感器技术是新技术⾰命和信息社会的重要技术基础,是现代科技的开路先锋,也是当代科学技术发展的⼀个重要标志,它与通信技术、计算机技术构成信息产业的三⼤⽀柱之⼀。
如果说计算机是⼈类⼤脑的扩展,那么传感器就是⼈类五官的延伸,当集成电路、计算机技术飞速发展时,⼈们才逐步认识信息摄取装置——传感器没有跟上信息技术的发展⽽惊呼“⼤脑发达、五官不灵”。
从⼋⼗年代起,逐步在世界范围内掀起了⼀股“传感器热”。
美国早在80年代就声称世界已进⼊传感器时代,⽇本则把传感器技术列为⼗⼤技术之创⽴。
⽇本⼯商界⼈⼠声称“⽀配了传感器技术就能够⽀配新时代”。
世界技术发达国家对开发传感器技术部⼗分重视。
美、⽇、英、法、德和独联体等国都把传感器技术列为国家重点开发关键技术之⼀。
美国国家长期安全和经济繁荣⾄关重要的22项技术中有6项与传感器信息处理技术直接相关。
关于保护美国武器系统质量优势⾄关重要的关键技术,其中8项为⽆源传感器。
美国空军2000年举出15项有助于提⾼21世纪空军能⼒关键技术,传感器技术名列第⼆。
⽇本对开发和利⽤传感器技术相当重视并列为国家重点发展6⼤核⼼技术之⼀。
⽇本科学技术厅制定的90年代重点科研项⽬中有70个重点课题,其中有18项是与传感器技术密切相关。
美国早在80年代初就成⽴了国家技术⼩组(BTG),帮助政府组织和领导各⼤公司与国家企事业部门的传感器技术开发⼯作。
美国国防部将传感器技术视为今年20项关键技术之⼀,⽇本把传感器技术与计算机、通信、激光半导体、超导并列为6⼤核⼼枝术,德国视军⽤传感器为优先发展技术,英、法等国对传感器的开发投资逐年升级,原苏联军事航天计划中的第五条列有传感器技术。
HXD1型电力机车牵引电机速度传感器故障诊断与排除方法HXD1型8轴大功率交流传动电力机车,该型机车采用先进的大功率交流机车传动技术,并充分考虑到国内铁路应用的特殊环境,采纳了先进、成熟、可靠的技术设计开发的一款适用于中国干线铁路重载货运的新型大功率交流传动电力机车。
HXD1型电力机车采用系统化、模块化、高可靠性设计理念,成功运用先进的交流传动技术、微机控制技术、故障诊断技术、TCN网络技术、电空制动技术、等设计。
在线运行机车中曾多次IDU 显示“TCU 相上管故障元件总故障“牵引电机隔离”等故障现象。
机车回段后,检查发现牵引电机速度传感器无效,导致牵引封锁。
针对HXD1型机车在段运用因电机速度传感器无效故障统计情况。
从检修角度方面,本文重点对电机速度传感器检测原理进行概述,并提出典型故障判断方法,为检修人员准确、快速处理故障提供帮助。
1.1检测原理司机给出牵引/制动指令送数字量输入输出模块DXM, DXM 将电气信号转换成控制信号,经由车载网络控制指令到门极驱动板让逆变器触发,最后使牵引电机工作。
电机工作后,电机速度传感器信号送往TCU,TCU 送出指令经门极驱动板送到逆变器,最后构成一个闭环控制系统。
同时TCU 将信号经车载网络控制系统,送至笔记本电脑用于检测各位电机的实际速度。
若TCU 检测到牵引电机速度传感器故障,无速度测量设备,牵引电机不能够继续运行,TCU 锁定相应的逆变模块。
1.2测速方法为了检测电机的转速,在非传动端安装了测速装置。
测速装置由测速齿盘和产生信号的速度传感器组成。
采用球墨铸铁,设118个锯型。
传感器为双通道信号相位差90°,控制系统通过两路信号的相位差识别电机的正、反转向,电机每转一圈,传感器发出118 个脉冲信号。
转速信号用于控制系统对电机进行控制。
电机速度传感器与被测齿轮不接触,无磨损,安装方便,且测速范围宽,温度适应范围宽,抗震性强。
测速齿轮盘、速度传感器与输出波形的关系示意图2.1速度传感器常见故障针对HXD1型机车在段运用因电机速度传感器无效故障统计情况,对多年维修数据整理、分析,其机车传感器故障有以下几类:一、光电耦合器件损坏二、停车检测到速度信号三、占空比超标四、传动轴折断五、两通道间的相位差超标六、丢脉冲2.2故障查找思路首先下载数据分析,确认具体速传无效或异常的轴位。
HXD1型机车电机温度传感器故障分析与优化摘要:本文以HXD1型机车电机温度传感器故障入手,通过对电机温度传感器的工作原理及故障机理进行分析,查出故障发生的根本原因。
并结合HXD1机车实际运用情况,提出引起故障的单相隔离逆变器的优化方案,在保证逆变器正常工作的情况下,解决电机温度传感器的故障,保证HXD1机车运用的稳定性。
关键词:电机温度传感器单相隔离逆变器电磁干扰控制逻辑0前言HXD1型机车在担当牵引任务过程中发生“电机1温度传感器故障”,通过对电机温度传感器的工作原理分析、硬线排查、软件监控、正线添乘测试等措施最终锁定故障原因为DZT110V-220V单相隔离逆变器输出端N线上存在直接接地(保护接零),此时温度传感器在车辆上受N线传导的电磁干扰及其他辅助逆变器等叠加电磁干扰,导致机车报电机温度传感器故障。
通过对逆变器输出端进行优化,滤除共模干扰,消除电机温度传感器故障,提升电力机车运用的稳定性。
一、功能原理介绍1、温度传感器信号采集原理温度传感器信号采集如下图一所示,外部110V控制电进入电源插件(PWU)后,经电源插件处理输出15V直流电,为模拟量采集插件供电,模拟量采集插件输出的恒流源作为温度传感器的电源,并采集温度传感器返回的温度信号。
图一 TCU信号采集框图2、温度传感器工作原理及故障判断逻辑2.1温度传感器工作原理温度传感器基于PT100热敏电阻测温,其原理框图如图二所示。
图二温度传感器测温原理框图系统给温度传感器提供恒流源,当被测位置的环境温度发生变化时,PT100电阻的阻值也会相应发生变化,系统采集PT100电阻两端的电压值,通过欧姆定律(R=U/I),换算出PT100电阻此时的电阻值,根据PT100电阻阻值与环境温度的对照表,即可知道被测位置的温度。
当PT100电阻本身异常,或者恒流源发生波动,系统采集到的温度曲线会发生波动。
2.2电机温度传感器故障判断逻辑:①采集的电机温度原始温度超过221℃或者低于-50℃持续超过 1s;②采集的原始温度单个周期内波动超过30℃持续 1s。
LKJ2000型监控装置出现“速度故障”的分析与处理Analysis and Treatment of “Speed fault”in LKJ2000 monitoringDeviceWang Tiejun(Inner Mongolia Jitong railway(group) limited liablity company daban comprehensive maintenance section ,chifeng city,neimongolia 025150)摘要:介绍LKJ2000型监控装置运行中出现“速度故障”,分析其产生的原因,对运输生产造成的影响。
在I、II级修及出入库检测方面,通过执行检修范围及工艺标准,提高车载设备质量,提出改进措施,从而降低设备故障的发生,确保车载设备质量运行稳定。
关键词:监控装置,速度故障,分析处理Abstract:This paper introdouces the“Speed fault”in the operation of of LKJ2000 monitoring device,analyzes its causes and influences on transportation production. In the aspect of I and II repair and inspection,the quality of on-board equipmentIs improved by carrying out the inspectionscope and process standard,and the improvement measures are put forward to reduce the occurrence of equipment failure and ensure the stable operation of equipment quality.Keyword:monitoring device,speed fault,analysis and processing中图分类号: U 文献标识号:B1.“速度故障”的危害与影响1.1 LKJ装置发展历程中国铁路从1994年起,第一代监控装置JK-2H型监控装置问世,结束了我国长期以来靠人力控制列车运行安全。
《装备维修技术》2021年第8期—177—HXD1D 型电力机车监控速度信号故障分析与处理杨 喆 刘 清(中车株洲电力机车有限公司,湖南 株洲 412001)引言HXD1D 型电力机车是为适应中国铁路运输市场的需要而研制的干线客运六轴交流传动电力机车。
该型机车持续功率为7200kW,最大运营速度为160km/h。
机车速度信号经数模转换后主要是提供给机车上的监控装置、速度表及相关的控制装置使用。
由于机车监控速度信号故障专业性强、涉及面广、判断困难,给机车运行安全带来了一定的隐患,也给作业者在故障判断、故障处理上带来一系列的问题,给使用和维修均带来了一定的影响。
1机车监控速度信号系统的构成HXD1D 机车监控速度信号系统由光电速度传感器、双针速度表、监控装置模拟量输入/输出插件、数模转换盒共同构成。
在机车转向架第三轴和第四轴上各装有一个光电速度传感器,每个轴使用相同的2个速度通道(如图1所示)。
第三轴速度传感器将两路信号送入LKJ2000监控主机中;第四轴速度传感器将两路信号分别送入LKJ2000监控主机和数模转换盒中。
在I、II 端司机台面板上分别安装有双针速度表,其信号线串接在电路中,通过数模转换盒输出0~20mA 的电流信号来驱动双针速度表的实际速度指针,并根据速度信号计算走行距离,输出里程计驱动信号。
图1 HXD1D 监控系统速度传感器2问题的提出HXD1D 型某号机车在库内进行速度信号检查时发现:①在机车三轴使用速度信号发生器模拟速度时,监控显示屏显示一、二速度通道正常,双针速度表无实际速度指示。
②在机车四轴使用速度信号发生器模拟速度时,监控显示屏显示第三速度通道正常,双针速度表实际速度有指示(正常情况下应没有指示),隔离监控装置,双针速度表实际速度指示正常。
3原理的分析当监控主机正常工作时,数模转换盒从监控主机取速度信号输出到双针速度表;当监控隔离时,数模装置X3T 插头14点得电,数模转换盒转换得到速度信号输出到双针速度表。
分析与探讨成铁科技2020年第2期浅祈关于LKJ速度信号异常问题及其处理方法潘菲菲:成都局集团公司成都电务维修段助理工程师联系电话:135****6720摘要本文介绍了机车组、动车组不同光电速度传感器的工作原理,从而浅析了不同车体常见的光电速度传感器故障现象和处理办法,值得在LIQ车载设备故障处理中借鉴推广。
关键词LKJ速度传感器速度信号故障处理1概述LKJ是中国铁路列车运行控制系统的组成部分,是用于防止列车冒进信号、运行超速事故和辅助机车、动车组司机提高操纵能力的重要行车设备。
LKJ是机车、动车组设备的组成部分。
速度信号是LKJ计算列车运行状态、防止运行超速、确定列车位置的重要参数。
2速度信号的采集与发生安装在机车(含动车组,下同)轮对轴端的光电速度传感器转速传感器,以电脉冲信号向LKJ 提供测速、测距信息。
光电速度传感器内光栅盘随机车车轴转动,红外发射管发出持续红外光,光栅盘转动将持续的红外光遮挡为断续的红外光线脉冲,红外接收管接收到红外光线后输出对应的高、低电平,从而输出与车轮转速成正比的电脉冲信号。
其工作原理可用图1表示(通常光栅片挡住红外光时传感器输出低电平而未挡住红外光时输出高电平)。
a1光电转速传感器工作原理示盲园”光电转换及输出电路的基本原理如图2所示,图中D1为电源极性保护二极管;VI为红外发射管;V2为红外接收管。
留2光屯持按忑離二电宰*理衣童匡“当机车轮对每转动一周,速度传感器向LKJ发送固定的脉冲数信息,LKJ程序根据相关参数、收到的脉冲数,计算出实际速度。
当测得传感器输出脉冲频率f,车轮直径D时,列车速度v可由下公式决定:v=^-x D xttx3600n式中V—列车运行速度,km/hj"f一传感器输出脉冲频率,Hz;“D-车轮直径,mj an—传感器一圈脉冲数(目前常见光电转速传感器每转输出脉冲数是200)。
3速度信号的传输及处理速度传感器输出的J131、J132、J133三路速度信号分别接入监控记录板MC68332的TPU0、TPU1、TPU2三个采集通道。
关于HXD3C型电力机车牵引电动机速度传感器故障模拟试验以及运用建议作者:林景东王振宏来源:《中国科技博览》2015年第19期[摘要]本文重点讲述了HXD3C型电力机车牵引电动机的控制方法以及机车防空转控制,同时通过对牵引电动机速度传感器的故障模拟试验进一步了解机车防空转控制过程,从而区分真假空转,指导司机操纵,避免由于机车假空转造成机破。
[关键词]HXD3C型电力机车空转速度传感器中图分类号:TP067 文献标识码:A 文章编号:1009-914X(2015)19-0319-01一、试验背景机车上的传感器很多,传感器故障给机车造成的危害也不相同,其中为监控装置、防空转装置提供速度信号的传感器出现故障时给机车造成的危害较大。
对防空转装置而言,传感器出现丢(或无)脉冲故障,会引起机车假空转,因为机车测量的脉冲要少于实际产生的脉冲数,系统控制板指示等闪烁,系统判断机车空转,引起撒砂、电流严重波动,减载、牵引速度上不来等现象,此时需手动切除防空转装置,否则会引起机破[1]。
与其它类型机车一样,HXD3C 型机车也使用了大量的传感器,牵引电动机的速度传感器在机车防空转控制中,发挥着重要作用。
HXD3C型电力机车投入运用以来,出现过因牵引电动机速度传感器故障造成微机控制系统收到错误的速度信号,激发微机控制系统进行空转调节,造成机车牵引力波动。
由于微机控制系统是在错误的牵引电动机速度传感器的信号传输下对机车进行空转调节,因此该调节处于死循环之中,机车无法加速,造成机破。
为了在运行中能够快速的判断机车是真的发生空转,还是因牵引电动机速度传感器故障而发生的假空转,我们做了一下试验研究。
试验之前,需要先对HXD3C型电力机车牵引电动机控制以及机车防空转控制进行一些了解。
二、HXD3C型电力机车牵引电动机控制以及机车防空转控制1、牵引电动机控制HXD3C型电力机车是大功率交流传动六轴干线客货两用电力机车。
该机车为轴控方式,由6组完全独立的牵引变流器分别为6台牵引电动机提供交流变频电源。
中南大学网络教育课程考试复习题及参考答案机车检测与故障诊断一、填空题:1.HXD1型交流电力机车电气系统包括、、。
2.HXD1型PWM辅助逆变器集成在牵引逆变器中,同牵引回路共用、、以及其它装置。
3.根据检测误差的性质及产生的原因,检测误差分为:、、。
4.传感器由、、组成。
5.机车故障诊断的内容包括、、方面。
6.HXD1型机车控制系统每节车内由MVB总线把所有的SIBAS系统、、连接在一起。
7.转向架主要由构架、、、、低位牵引杆装置、轮盘基础制动装置和转向架辅件等部分组成。
8.机车故障诊断的具体实施过程可以归纳为、、、。
9.常用的超声波诊断法有、、。
10.HXD1型机车主风源系统包括、、主风缸。
11.脉冲反射法可分为、、、板波探伤。
12.列车通信网络也分成三个层次,即、、。
13.LonWorks 技术包括以下几个组成部分LonWorks 节点和路由器、、、LonWorks 网络和节点开发工具。
14.异步电机转子绕组故障主要是、。
15.HXD1型机车装备的空气制动系统包括单独制动、__________、__________、__________。
16.HXD3型机车主电路由__________ 、_________ _、________ __组成。
17.分析声发射信号的方法、、能量分析法、振幅分布分析法、频谱分析法。
18.机车故障诊断的专家系统的基本结构主要包括、、、。
19.MVB 可传送三种类型的数据、、。
20.机车的高压部件主要包括:隔离开关、、、、机车主变压器、车顶绝缘子、穿墙套管、高压电缆及其终端、避雷器等。
21.HXD3型机车设有辅助系统主接地保护、、、、加热装置保护。
22.HXD3型机车辅助电路由辅助变流器供电电路、、、制冷及采暖电路组成。
23. 、称为专家系统的核心。
24. 知识的、、是专家系统的三个基本问题。
25.BVAC.N99 型真空断路器利用和电弧的扩散作用断开电路。
26.CAN 结构划分为、。
题目:基于神经网络的机车速度传感器检测与故障诊断院系:电气工程系班级:电力机车班学号:2010姓名:指导教师:2013年6月5日基于神经网络的机车速度传感器的检测与故障诊断[****,***** 2010电车**班,****]摘要建立了RBF神经网络预测器模型,将其应用到机车双速度传感器的故障诊断中,并提出了诊断决策方法。
利用MATLAB实现了RBF神经网络预测器的仿真,并模拟了机车速度传感器输出的3种故障模式进行了故障诊断辨识。
仿真结果表明文中提出的方法能够准确地进行速度传感器在线故障诊断。
关键字:机车;RBF神经网络;速度传感器;故障诊断AbstractFor fault diagnosis of locomotive speed sensor, a predictor method based on RBF neural network is established, and diagnostic decision method is also proposed. The RBF neural network predictor and three kinds of fault mode of locomotive speed sensor are simulated by MATLAB. The simulation results indicate that this method can diagnose faults of the speed sensor online exactly, and provides a new idea for locomotive speed sensor fault diagnosis.Key words: locomotive; RBF neural network; speed sensor; fault diagnosis1.引言机车速度传感器是通过测量机车车辆的主轮轴转速来实现列车控制功能的基础设备之一,其性能指标直接影响机车运行监控装置的正常功能,是整个控制系统的关键。
但由于其工作环境复杂、恶劣,在列车控制系统中,测速传感器较薄弱,是机车车载设备故障的主要根源。
目前,人工检测和定期维修校准是诊断测速传感器故障的最基本的方法,但其工作效率低、工作强度大、实时性差,已不能满足现代铁路系统的发展要求。
近年来,为了提高对典型的复杂、多目标、大滞后、非线性系统的故障诊断能力,同时提高故障诊断效率及降低误报率,采用现代故障诊断技术已成为目前故障诊断领域的研究热点。
BP (Back Propagation ,简称BP )神经网络是故障诊断中研究最广泛的一种,它采用多层感知器,并采用反向传播算法进行网络训练。
但由于BP 算法涉及到非线性优化问题,同时调节权值采用的负梯度下降法存在局部极小点、收敛速度慢等,因而它就很难应用于实际系统当中。
径向基函数RBF (Radial Basis Function ,简称RBF )神经网络克服了BP 神经网络的缺陷,相比BP 神经网络,RBF 神经网络具有更容易逼近函数的局部、训练时间短、更适合在线诊断等优点。
本文以光电式脉冲测速传感器系统为基础,在分析常见故障模式及故障特征的基础上,采用RBF 神经网络的预测方法,建立速度传感器的故障诊断模型,实现对传感器系统的故障诊断和数据重构。
2. 关于神经网络的故障诊断方法人工神经网络是由大量神经元以某种拓扑方式相互连接而成的,利用网络拓扑结构和权值分布实现非线性的映射,通过全局并行处理实现从输入空间到输出空间的信息变换,由于能够高精度地模拟人脑神经网络的实现过程,因此在故障诊断领域中得到广泛的应用。
RBF 神经网络是一种前馈型网络,一般为3层结构,其结构如图1所示。
该网络有n 个输入、h 个隐节点、m 个输出。
其中12(,,,)T n n X x x x R =∈L 为网络输入矢量,h m W R ⨯∈为输出权值矩阵,01,,,m b b b L 为输出单元偏移,12(,,,)Tm Y y y y =L 为输出向量,(*)i Φ为第个隐节点的激活函数,∑表示输出层的线性激活函数,||*||则表示欧式范数。
图1 RBF 神经网络结构径向基函数(*)i Φ,一般采用Gaussian 函数,表示为x x x 1y m y (||||)h h x c Φ-22()i t i t e σ-Φ=式中:i σ称为该函数的扩展常数或宽度。
i σ越小,径向基函数的宽度就越小,其函数越具有选择性。
于是,RBF 网的输出层的第k 个输出可表示为1(||||)hk i i i i Y w x c ==Φ-∑式中:i w 为输出层的调节权值;i c 为隐含层的中心向量;||||i x c -为向量i x c -的欧几里德范数(即x 与c i 之间的径向距离)。
3. 机车速度传感器的结构与常见故障国内的内燃机车、电力机车和动车组广泛使用光电式速度传感器,传感器将机车运行的速度量对应转换为光电脉冲,并提供给机车运行监控装置。
因而,速度传感器的性能指标直接影响机车运行监控装置的工作,是整个机车速度监控系统的关键。
3.1 光电式速度传感器的结构这里以NTQG15D 光电式速度传感器为例,由支承结构、光电转换电路、转轴及万向节传动机构三部分组成。
光栅盘固定在转轴万向节的后端,转轴由2x46204支承在底座上,轴承润滑采用锂基4号润滑脂。
光栅转动与静止部分采用可逆密封胶圈密封以防止灰尘及油污侵入,转轴为万向联轴节的单叉节,万向节共设有8个滚针轴承,确保转动的灵活性。
光电转换模块固定在底座上位于光栅片两端,电缆引出线固定在底座上并采用耐油的橡胶管防护,护管与底座采用冲压紧箍帽密封,采用插针接触可靠的JL5型的机车电连接器,为防止连接器出进水,传感器引出电缆与底座的连接器注胶密封后再封装固定。
3.2 工作原理及技术参数NTQG15D 光电式速度传感器利用一个光电耦合器件经随机车轮转动的光栅片变为断续的光,使光电耦合器中的光敏接收管输出通断的脉冲信号,经电路放大整形后,输出与转速成比例的方波脉冲序列,经计算机处理变为监控所需的机车运行速度信号。
工作直流电源:15V ,功耗电流小于50 mA ,输出脉冲幅值(负载电阻R L =3K Ω)高电平9V ,低电平-2 V ,相位差:900±50%,转速范围:0~1500 r/min,每圈的脉冲数:200,输出方波波形占空比:(50±20)%。
3.3常见故障(1)光电耦合器件损坏主要是光电器件底座的固定角与器件的封装体断裂导致光电耦合器件与光栅片的相对位置发生变化,产生的主要原因:光电耦合器件封装材质本身较脆,安装时由于螺丝拧的松、紧度不同,使光电耦合器件固定脚材质形变,经过一段时间的使用固定角与器件的封装体发生断裂。
建议使用可调整扭力的扭矩安装工具以保证固定螺丝安装时的松紧适度,减少此类故障的发生。
(2)停车起速度机车在停车状态下,监控显示有5Km/h以下的速度,此类现象多为传感器引出电缆线屏蔽不良,抗干扰差造成,近来动车组使用的NTQG15B速度传感器发生此类故障的也较多。
采取的措施是加强屏蔽、可靠接地,针对动车组更换抗干扰强的新型速度传感器。
(3)占空比超标在日常的检修过程中,经常出现占空比超标、或处于临界值而造成监控速度不准,主要原因是光电耦合器件封装上的问题,经过一段时间的运用,参数发生变化,要对相应通道的光电耦合模块进行更换。
(4)传动轴折断造成这一现象的主要原因:速度传感器安装座即机车轴箱外盖安装开孔尺寸及车轮轴端方孔套尺寸不合适或使用的速度传感器轴长尺寸不对,机车在运行时传感器传动轴滑出方孔套而无法归位、或传感器传动方轴与机车轴端面顶死造成传动轴折断现象。
避免此类现象的发生主要是在安装时要确认好安装尺寸和正确使用长短轴传感器。
(5)两通道间的相位差超标光电耦合模块沿光栅圆周方向及径向的安装位置发生微小的变化都将引发两通道之间相位差的变化,当出现相位超标时要仔细检查光电模块安装螺丝是否松动,同时也要检查光栅片是否发生形变,因为光栅片发生形变后将使将使光电耦合器件收、发位置发生变化。
(6)丢脉冲运用一段时间后出现丢脉冲现象,一是光电耦合器件本身的材质问题,主要是光接收电路的材料感光度降低,造成电路转换过程中丢脉冲。
尽管有多种故障原因,但故障造成的情况归结起来可以有3种:空转、滑行、不可自行恢复的机械故障。
因此下文对速度传感器的故障诊断主要从这三个方面来讨论。
4.基于神经网络方法的机车速度传感器故障诊断4.1.机车速度传感器故障诊断的模型建立机车速度传感器利用光电转换原理将机车轮轴转速转换成电脉冲信号输出,即机车主轴转动一周, 传感器就会产生出n个(n为码盘齿数)电脉冲输出信号。
对于架控方式的机车,一个基本控制单元中一般至少有2个速度传感器,基于神经网络的双速度传感器故障诊断原理如图2所示。
图2 机车双速度传感器故障诊断原理图分别对2个速度传感器建立RBF神经网络预测器。
假设刚开始2个速度传感器都正常工作,将传感器1前k+2个时刻的输出数据x1(1)~x1(k+2)和传感器2前k+2个时刻的输出数据x2(1)~x2(k+2)通过采样获得并保存,分别作为2 个传感器神经网络预测器的初始学习样本数据,2个神经网络预测器经过在线训练以后开始工作。
因2个神经网络预测器工作原理相同,下面以神经网络预测器1为例说明其工作原理,预测器结构如图3所示。
图3 RBF 神经网络预测期结构示意图取速度传感器1的前k 个输出数据x 1(1)~x 1(k)作为 RBF 神经网络预测器1的输入,x 1(k+1)作为RBF 神经网络预测器1输出,组成第一组训练样本,x 1(2)~x 1(k+1)作为RBF 神经网络预测器1的输入,x 1(k+2)作为RBF 神经网络预测器1输出,组成第二组训练样本,即训练样本表示为:11111111(1)(2)()(1),(2)(2)(3)(1)T Tx x x k x k X Y x k x x x k +⎡⎤⎡⎤==⎢⎥⎢⎥++⎣⎦⎣⎦L L 以X 为输入、Y 为输出在线训练RBF 神经网络预测器1,按梯度下降法调整权值矩阵,当达到一定精度后,RBF 神经网络预测器开始工作,此时,将x 1(3)~x 1(k+2)作为新的输入,RBF 神经网络预测器1将预测传感器在下一时刻即k+3时刻的输出 ,将预测值与这一时刻实际采样值x 1(k+3)相减,得到误差e 1。
若e 1小于给定某一阈值e*,则认为此时传感器1工作正常,并将当前采样值加入到学习样本中,覆盖掉先前的第一组样本,对网络预测器重新进行训练,则新的学习样本变为:11111111(2)(3)(1)(2),(3)(3)(4)(2)T Tx x x k x k X Y x k x x x k ++⎡⎤⎡⎤==⎢⎥⎢⎥++⎣⎦⎣⎦L L 若e 1大于给定某一阈值e*,则认为此时传感器1工作不正常,依次类推,RBF 神经网络预测器一边不断在线学习新的样本,一边对传感器下一时刻输出值进行预测。