Position-Time and Velocity-Time Graphs:位置的时间和速度时间曲线图
- 格式:ppt
- 大小:386.00 KB
- 文档页数:5
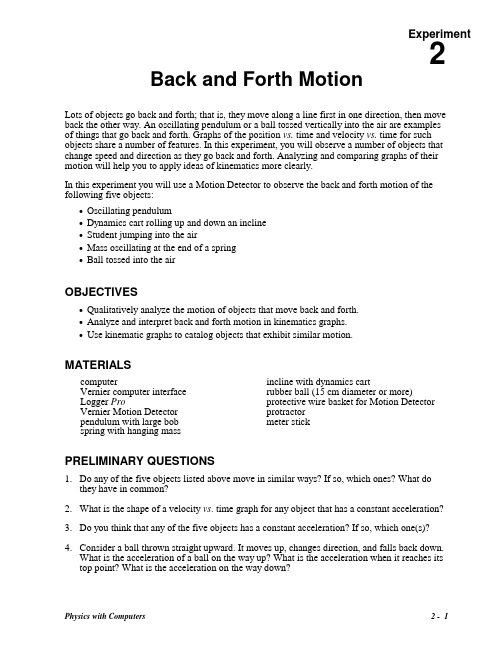
Experiment2Back and Forth MotionLots of objects go back and forth; that is, they move along a line first in one direction, then move back the other way. An oscillating pendulum or a ball tossed vertically into the air are examplesof things that go back and forth. Graphs of the position vs. time and velocity vs. time for suchobjects share a number of features. In this experiment, you will observe a number of objects that change speed and direction as they go back and forth. Analyzing and comparing graphs of their motion will help you to apply ideas of kinematics more clearly.In this experiment you will use a Motion Detector to observe the back and forth motion of the following five objects:•Oscillating pendulum•Dynamics cart rolling up and down an incline•Student jumping into the air•Mass oscillating at the end of a spring•Ball tossed into the airOBJECTIVES•Qualitatively analyze the motion of objects that move back and forth.•Analyze and interpret back and forth motion in kinematics graphs.•Use kinematic graphs to catalog objects that exhibit similar motion.MATERIALScomputer incline with dynamics cartVernier computer interface rubber ball (15 cm diameter or more)Logger Pro protective wire basket for Motion DetectorVernier Motion Detector protractorpendulum with large bob meter stickspring with hanging massPRELIMINARY QUESTIONS1. Do any of the five objects listed above move in similar ways? If so, which ones? What dothey have in common?2. What is the shape of a velocity vs. time graph for any object that has a constant acceleration?3. Do you think that any of the five objects has a constant acceleration? If so, which one(s)?4. Consider a ball thrown straight upward. It moves up, changes direction, and falls back down.What is the acceleration of a ball on the way up? What is the acceleration when it reaches itstop point? What is the acceleration on the way down?Experiment 2PROCEDUREThese five activities will ask you to predict the appearance of graphs of position vs. time and velocity vs. time for various motions, and then collect the corresponding data. The Motion Detector defines the origin of a coordinate system extending perpendicularly from the front of the Motion Detector. Use this coordinate system in making your sketches. After collecting data with the Motion Detector, you may want to print the computer graphs for use later in the analysis.Part I Oscillating Pendulum1. Connect the Motion Detector to the DIG/SONIC 1 channel of the interface.Motion DetectorFigure 12. Open the file “02 Pendulum” from the Physics with Computers folder.3. Sketch your prediction of the position vs. time and velocity vs. time graphs of a pendulumbob swinging back and forth. Ignore the small vertical motion of the bob and measureposition along a horizontal line in the plane of the bob’s motion. Based on the shape of your velocity graph, do you expect the acceleration to be constant or changing? Why? Will itchange direction? Will there be a point where the acceleration is zero?4. Place the Motion Detector near a pendulum with a length of 1 to 2 m. The Motion Detectorshould be level with the pendulum bob and about 1 m away when the pendulum hangs at rest.The bob should never be closer to the detector than 0.4 m.5. Pull the pendulum about 15 cm toward the Motion Detector and release it to start thependulum swinging.6. Click to begin data collection.7. If you do not see a smooth graph, the pendulum was most likely not in the beam of theMotion Detector. Adjust the aim and repeat Steps 5 – 6.8. Answer the Analysis questions for this Part I before proceeding to Part II.Part II Dynamics Cart on an Incline9. Open the experiment file “02 Cart.” Two graphs will appear on the screen.10. Place the Motion Detector at the top of an incline that is between 1 and 2 m long. The angleof the incline should be between 5° and 10°.11. Sketch your prediction of the position vs. time and velocity vs. time graphs for a cart rollingfreely up an incline and then back down. The cart will be rolling up the incline and toward the Motion Detector initially. Will the acceleration be constant? Will it change direction?Will there be a point where the acceleration is zero?Back and Forth Motion 12. Hold the dynamics cart at the base of the incline. Click to begin taking data. Whenyou hear the clicking, give the cart a push up the incline. Make sure that the cart does not get closer than 0.4 m to the Motion Detector and keep your hands away from the track as the cart rolls.13. Zoom in on the portion of each graph that represents the time that the cart was freely rolling.To do this, use the mouse to drag a rectangle around the useful portion of the data, then click the Zoom In button, . Answer the Analysis questions for Part II before proceeding toPart III.Part III Student Jumping in the Air14. Open th e experiment file “02 Jump.”15. Secure the Motion Detector at least 3 m above the floor, pointing down.16. Sketch your predictions for the position vs. time and velocity vs. time graphs for a studentjumping straight up and falling back down. Will the acceleration be constant? Will it change direction? Will there be a point where the acceleration is zero?17. Stand directly under the Motion Detector.18. Click to begin taking data. When you hear the clicking, bend your knees and jump.Keep your arms still while in the air.19. Zoom in on the portion of the graph representing the jump. Include everything from thebending of the knees to the landing. To do this, use the mouse to drag a rectangle around the useful portion of the data and click the Zoom In button, . Answer the Analysis questionsfor Part III before proceeding to Part IV.Part IV A Mass Oscillating at the End of a Spring20. Open the experiment file “02 Spring.”21. Place the Motion Detector so it is facing upward, about 1 m below a mass suspended from aspring.22. Sketch your prediction for the position vs. time and velocity vs. time graphs of a masshanging from a spring as the mass moves up and down. Will the acceleration be constant?Will it change direction? Will there be a point where the acceleration is zero?23. Lift the mass about 10 cm (and no more) and let it fall so that it moves up and down.24. Click to begin data collection.25. If you do not see a smooth graph, the mass most likely was not in the beam of the MotionDetector. Adjust the aim or look for interfering objects and try again.26. Zoom in on the portion of each graph that represents one cycle of the mass. To do this, usethe mouse to drag a rectangle around the useful portion of the data and click the Zoom Inbutton, . Answer the Analysis questions for Part IV before proceeding to Part V.Experiment 2Part V Ball Tossed into the AirMotion DetectorFigure 227. Open the experiment file “02 Ball.”28. Sketch your predictions for the position vs. time and velocity vs. time graphs of a ball thrownstraight up into the air. Will the acceleration be constant? Will it change direction? Will there be a point where the acceleration is zero?29. Place the Motion Detector on the floor pointing toward the ceiling as shown in Figure 2.Place a protective wire basket over the Motion Detector.30. Hold the rubber ball in the palm of your hand, about 0.5 m above the Motion Detector.31. Click to begin data collection.32. When you hear the Motion Detector clicking, gently toss the ball straight up over the MotionDetector. Move your hands quickly out of the way so that the Motion Detector tracks the ball rather than your hand. Catch the ball just before it reaches the wire basket.33. Zoom in on the portion of each graph that represents the time that the ball was in the air. Todo this, use the mouse to drag a rectangle around the useful portion of the data and click the Zoom In button, .Back and Forth MotionANALYSISPart I Oscillating Pendulum1. Print or sketch the position and velocity graphs for one oscillation of the pendulum. Comparethese to your predicted graphs and comment on any differences.2. Was the acceleration constant or changing? How can you tell?3. Was there any point in the motion where the velocity was zero? Explain.4. Was there any point in the motion where the acceleration was zero? Explain.5. Where was the pendulum bob when the acceleration was greatest?6. Return to the procedure and complete the next part.Part II Dynamics Cart on an Incline7. Print or sketch the portion of the position and velocity graphs that represent the time that thecart was going up and down the incline. Compare these to your predicted graphs andcomment on any differences.8. Was the acceleration constant or changing? How can you tell?9. Logger Pro can display the tangent line to a curve, as well as display the slope numerically.To turn on this function, click on the tangent button, . Use the tangent line and the velocity graph to determine the acceleration of the cart when it was on the way up, at the top, and on the way down the incline. What did you discover?10. Was there any point in the motion where the velocity was zero? Explain.11. Was there any point in the motion where the acceleration was zero? Explain.12. Return to the procedure and complete the next part.Part III Student Jumping in the Air13. Print or sketch the portion of the position and velocity graphs that represent the time from thefirst bend of the knees through the landing. Compare these to your predicted graphs andcomment on any differences.14. Use the Tangent Line button, , to determine where the acceleration was greatest. Was itwhen the student was pushing off the floor, in the air, or during the landing?15. When the student was airborne, was the acceleration constant or changing? How can you tell?16. Was there any point in the motion where the velocity was zero? Explain.17. Was there any point in the motion where the acceleration was zero? Explain.18. Return to the procedure and complete the next part.Part IV Mass Oscillating on a Spring19. Print or sketch the position and velocity graphs for one vibration of the mass. Compare theseto your predicted graphs and comment on any differences.20. Was the acceleration constant or changing? How can you tell?Experiment 221. Was there any point in the motion where the velocity was zero? Explain.22. Was there any point in the motion where the acceleration was zero? Explain.23. Where was the mass when the acceleration was greatest?24. How does the motion of the oscillating spring compare to the pendulum?Part V Ball Tossed into the Air25. Print or sketch the portion of the position and velocity graphs that represent the time the ballwas in the air. Compare these to your predicted graphs and comment on any differences.26. Was the acceleration constant or changing? How can you tell?27. Use the tangent line and the velocity graph to determine the acceleration of the ball when itwas on the way up, at the top, and on the way down. What did you discover?28. Was there any point in the motion where the velocity was zero? Explain.29. Was there any point in the motion where the acceleration was zero? Explain.Analysis of all Parts30. State two features that the five position graphs had in common. State two ways that the fiveposition graphs were different from one another.31. State two features that the five velocity graphs had in common.32. State two ways that the five velocity graphs were different from one another. EXTENSIONS1. Investigate other back-and-forth motions such as:•Bouncing balls•A dynamics cart with a plunger bouncing off a solid object•A yo-yo2. Attach an accelerometer to your belt and use it to analyze your motion when you jump up.Compare your landing acceleration when you bend your knees upon impact and when you do not bend your knees. Safety warning: Jump only a few inches when you do not bend your knees.3. Use a force sensor to measure the force in the vibrating spring and relate this to the kinematicgraphs that you observed in this experiment.。



Name ____________________________________________________________Tutorial © University of Maryland Physics Education Research Group. These tutorials are Potential Energy DiagramsI. IntroductionThe objective of this tutorial is to familiarize you with constructing the potential energy diagrams for simple mechanical systems. We shall ignore friction and assume that energy is conserved.II. The Square Well PotentialWe will now explore what happens when acart moves freely along a track but is confinedto stay between two walls.Without recording the motion, set the cartrolling gently towards a springy block.Observe the cart as it bounces off one of theblocks.1.Describe qualitatively how the velocityof the cart changes during the collision.2.Predict what a graph of the net force felt by the cart would look like as a function of the cart’s position.The motion detector measures the distance from it to the nearest object in front of it. The force probe generates a signal proportional to the pull or push on it. If you have not worked with these devices before, click on the START button and observe how the graphs on the screen change as you move the cart up and down the track.• Check that the motion detector and the reflector are aligned .• Keep the motion detector at least 40 cm away from the close end of the track.• Zero the force probe by pressing the “Zero” button on the lower right of the screenwhile the force probe is not touching anything.3. Now record the net force the cart feels as bounces back and forth between the twoblocks by pressing START and gently running the cart back and forth so it hitseach block once. Copy the force-distance graph you get from the computer on thegrid below.Distancefrom end blockNetForceCompare with your prediction. Are there any discrepancies?4. The potential energy, U(x), is given by an integral from a reference point (taken here to x = 0)U x F dr F x x x ()(')dx'=−⋅=−∫∫r r 00where the right hand integral is for the one-dimensional e your F vs. x graph to predict the qualitative shape of the potential energy vs. x graph for the cart. Explain how you arrived at your answer.Distancefrom end blockPEIII. Motion of a body held by springsIn the following experiments, we will use the computer and the given sensors to record the motion of the cart, measuring simultaneously its position and the force it experiences when connected to two springs. To set up the experiment:• connect the springs to the force probe mounted on the cart.1. Draw the free body diagram forthe cart at the followingpositions:(a) center of the track (b) displaced to the left (c) displaced to the right2. Without recording the motion on the computer, displace the cart by about 20 cmand release it. Describe the net force that acts on the cart as it oscillates.3.What are the positions at which the cart experiences the maximum and theminimum net force?4.Predict how the net force changes as thecart is displaced by a distance x fromthe equilibrium position. Plot yourprediction on the graph at right.Let’s now rearrange the display to choose the zero of position at the cart’s equilibrium point, rather than at the ranger itself. To do this, we have to introduce a new variable into the program and define it. Do this by following the steps below.a.Set the cart to be at rest at equilibrium position between the springs, and clickSTART to record the position of the cart. Write down the number:x0 =b.Click and hold the right button. Select DATA and choose DATA A->DATA B.c.Displace the cart by approximately 10 cm from the equilibrium position and releaseit so that it begins to oscillate.d.Click on START in the distance-time window to begin data logging.e.When done, select DATA and NEW COLUMN. In the calculator pad that comesup, for the FORMULA, type “Dist” − your value of x0. Fill in the FULL NAMEwith Displacement, SHORT NAME x, UNITS m and click OK.f.In the upper left graph, go to the y-axis label. Clicking with the left mouse buttonbrings up the list of quantities that may be graphed. Select Displacement insteadof Distance. Discuss the differences between Displacement and Distance. Repeat the substitution in the force-distance and velocity-distance graphs.5.Does the force-displacement data match your predictions? Resolve anydiscrepancies.6.Suppose the cart is oscillating. Write an expression to describe the work done bythe net force F as the cart moves from an arbitrary displacement d1 to another, d2.7.How is the change in kinetic energy of the cart related to the work done on thecart?8.How is the change in potential energy of the cart related to the work done on the cart? Explain.9.Copy the force-displacement graph from the computer on the grid below.e your force-displacement graph to sketch what you think the potential energy vs. displacement graph would look like. Explain how you determined the shape of this graph.We can now use the computer to construct kinetic and potential energy curves from our data.On the computer, select DATA and NEW COLUMN. In the calculator pad that comes up, for the FORMULA, type 0.5*“Vel”^2. This is the expression for the kinetic energy of the cart. (The mass of the cart is 1 kg.) View the kinetic energy vs. displacement in thebottom right graph on the computer.disp.PE11.Sketch a copy of the kinetic energy graph from the computer in the space below.12.Sketch what the total energy minus the kinetic energy looks like as a function of displacement. Does this agree with your prediction for the potential energy graph? Resolve any discrepancies.。

Lab 2VelocityOverviewIn this lab, we will explore the relationship between the position function and the velocity function of a moving object. In the lectures, we have seen that the velocity function v(t) is the derivative of the position function s(t) (and therefore s(t) is an antiderivative ofv(t)). We will be examining these statements in this lab by using a motion detector to measure the velocity and position of a person walking.Vocabulary used in this lab•Distance: This is the distance an object is from the motion detector. The words distance and position will be used interchangeably in this lab.•Displacement: This is “change of position,” that is, the difference between the initial and terminal coordinates the object. Displacement can be either positive or negative. (Think about what the difference between positive and negativedisplacement is.)•Velocity and speed: The important thing to note here is that velocity can be either positive or negative, depending on whether motion is in the positive ornegative direction. But speed = |v(t)| is never negative: it is the absolute value of the velocity. For example, a car’s speedometer is measuring speed and alwaysreads positive, regardless of the direction you’re traveling.•Total distance traveled: Perhaps this is best illustrated by an example. If you walk 2 meters forward and then 2 meters backward then your displacement willzero (the initial and terminal positions are the same so therefore the difference of coordinates is zero). But, you actually traveled 4 meters. In this case, the totaldistance traveled would be 4 meters. The “total distance traveled” is nevernegative.Mathematics for this labThe mathematics that we will need is the relationship between displacement and velocity: •Displacement is equal to the definite integral of velocity v(t) over a time interval.•Total distance traveled is equal to the definite integral of speed |v(t)|over a time interval.These ideas are discussed in the textbook on pages 374-375.Materials•Computer with Vernier computer interface.•Vernier motion detector. This will plug into the LoggerPro computer interface.•Separate “Lab Report 2” sheet. This is what you will turn in. It is due one week after your scheduled lab day, by 4:30 pm, in the Mathematics Office (Cupples I,room 100).Comments on the Motion DetectorThe motion detector works by emitting short bursts of ultrasonic sound waves. You will hear a clicking sound when the detector is operating. The detector “listens” for the ech o of these ultrasonic waves returning to it. The motion detector measures the time it takes for the sound waves to make the trip from the detector to the object and back to the detector. Knowing the speed of sound, the detector is then able to calculate the distance to the object.The specifications on the detector state that it has a minimum range of 0.4 m. and a maximum range of 6.0 m. The detector seems to work best if there is a smooth flat surface for the sound waves to bounce off of.Practically speaking, this means that as you collect data•Your motion needs to be parallel to the sensor and not perpendicular to it (i.e., you will need to walk either away from or towards the sensor, or both).•You will probably want to be holding a book or piece of cardboard in the sensor’s “line of sight” while you walk.•If neighboring lab teams are moving while you are collecting data, your motion detector might pick up their motion as well. You will have to cooperate with your neighboring teams so that your motion detector is only picking up data from your walking.•It is very important that the motion detector does not move. (What would the motion detector measure if it was moving?)ProcedureThe first thing to do is get the computer and motion detector ready.Connect the motion detector to the Dig/Sonic 2 port of the Lab Pro. Make sure the Lab Pro is connected to the USB port of the computer. (It is likely that these have already been done for you.)•Set the detector upright on the edge of the desk, facing out in a direction in which you have a clear path at least 2 m. long.•Open the LoggerPro program. You will want to select “Lab Pro USB” for the port in the Setup Interface. It is possible (hopefully not likely) that LoggerProwill not recognize the hardware. If this happens, unplugging the Lab Pro andplugging it back in should take care of the problem.•Open the experiment file for this lab. (Click on the “Open” button and open the file labeled “lab2_velocity.” (It is possible that LoggerPro will complain aboutthis file – just ignore any complaint and click “OK.”)•At this point, you should be able to collect distance and velocity data. Try playing around with the motion detector by pressing the “collect button” on thetoolbar. (For example: turn the sensor to face the nearest wall and collect data—what happens? Turn the sensor around and collect data by moving your handback-and-forth in front of it.) When you start collecting data, notice that velocity and distance data is graphed and the actual data appears in a table to the right ofthe graphs. Notice also that each time you start collecting new data, the data from the previous run is cleared. (Another way to clear recently collected data is toselect Data, Delete Run from the menu.)You are now ready to start collecting data that you will analyze.•Decide who will monitor the computer (and hit the collect button) and who will be the “mover”—the mover will create distance and velocity data bywalking back and forth in front of the motion detector.•Your goal is to generate a data set that exhibits both positive and negative velocity during the five seconds of movement.•There is a limited amount of free space in the lab for straight-line movement, so you will have to coordinate your data collection with your neighbors.Make sure you have a clear path before you start collecting your data.•The mover should take an initial position standing in front of the motion detector, holding a book or a piece of cardboard in the detector’s “line ofsight.” This will help to make a smoother velocity graph as you collect thedata.Before beginning, note the mover’s initial position. When the datacollection stops, the mover should remain in position while his/her partnernotes the terminal position. (An acceptable method to note these positionsis to put a marker, like a pen, on the floor where the mover’s feet start.)Measure and write down these positions (number of meters in front of thesensor); you’ll need this information later. (There will be a tape measurein the lab for you to measure the distances. You’re not looking for greataccuracy—just something in the right ballpark. Remember that 1 meter isapproximately 3.28 feet.).•Click on the “Collect” button and gather the data. When the mover hears the motion detector making the clicking sound, s/he should start moving along astraight line in front of the motion detector. Remember your goal to createdata with positive and negative velocity.After collecting your distance and velocity data, you should make sure your data looks “reasonable”: for example,•Is the graph of the velocity reasonably smooth?•Does the distance data in the table look like what you were expecting? Do the distances more-or-less match up with what you noted for the initial and finalpositions?•Is the velocity positive and negative when you were expecting it to be positive and negative?•If your data looks questionable, collect another set of data. (The good news is that it doesn’t take much time to collect another data set if necessary.) •If your data looks good, save it so that you can finish your report after the lab period if necessary. (If you didn’t bring a diskette, you could e-mail the datato yourself.)At this point, you are ready to analyze your data.•You should have two graphs –position (labeled “Distance vs. Time”) and velocity (labeled “Velocity vs. Time). You should print both of these graphs and also the table: activate each graph or table window before you print (so that youget a nice printout of each one separately).•Click on the “Examine” button (Analyze – Examine in the menu). This should allow you to more easily read both the graph and the data (watch what happenswhen you move the mouse to the graphs and the data table). Using this, answer#1-3 on Lab Report 2.DisplacementWe want to calculate the displacement of the mover after 5 seconds. We can do this in three different ways:a) by having LoggerPro estimate the integral of the velocityfunction v(t) for 0 <= t <= 5b) by using our data and the Fundamental Theorem of Calculus (Part II) to evaluate the same integralc) by using the measurements we made “by hand” during the data collection process.In detail:a) Using LoggerPro to estimate the integral of the velocity:•Click on the left-hand side of the velocity graph (Time=0) and drag the black line across to the right-hand side of the graph. While you are doing this, the values in the table window should be highlighted. Make sure you actually click on thegraph on not outside the graph (otherwise you will see the pop-up box asking you about the y-axis and y-scale).•Click the Integral button or choose Analyze – Integrate from the menu. A floating box with LoggerPro’s estimate of the value of the integral appears in the Veloci ty graph window. Note the units in this box: m/s * s, which is just meters (theseconds cancel out); don’t misread the units as “m/sec2” !! Print a copy of thegraph with the box. Record this value in #4a on the Lab Report.b) According the Fundamental Theorem of Calculus (Part II), we can compute the integral of v(t) over the time interval [0,5] using an antiderivative. In this situation, the numeric result can be worked out using subtracting two numbers taken from your data tables. In the Lab Report #4b state what numbers you are using and give the resulting value for the integral.c) Finally, calculate the displacement using the distances from the sensor that you measured during the data collection process. Record the result of the calculation in Lab Report #4c.In Lab Report #4d, you are asked to offer some reasons why the results in a), b) and c) are (probably) not equal.Total Distance TraveledTo find the total distance traveled, we need to integrate the speed |v(t)| during our 5 second time interval. To have LoggerPro do this,we need the speed data—so we create it in a new column:•Activate the velocity graph window by clicking on the velocity graph. Select View – Graph Options from the menu.•Modify the Graph Title by typing “Speed/” before Velocity. It should now read Speed/Velocity vs. Time. Click Apply, then click OK.•Select Data - New Column, Formula from the Data menu. The New Column window will appear.•Under the Options tab, in the Labels section, type “Speed” for Long Name, “sp”for Short Name and “m/s” for Units.•Click the Definition tab. In the Equation box, enter the formula(abs(“Velocity”)). You can (and should) do this by selecting “abs()” from the Functions list followed by selecting “Velocity” from the Variables list.•Click Try New Column. If it new data looks as it should (how should it look?), then click “OK”.•Notice that the new graph (Speed) coincides with the original velocity graph when the velocity is positive. How do these graphs compare when velocity is negative? •Click on the left-hand side of the speed/velocity graph (Time = 0) and drag the black line across to the right-hand side of the graph. All of the values in the table window should be highlighted.•Click the Integrate button. An Integral Selection window appears. Remove the check next to Velocity by clicking in its box. Make sure that Speed is checked.Click OK.• A floating box with LoggerPro’s estimate of the value of the integral appears in the Speed/Velocity graph window. Print a copy of the graph with the box. Report the total distance traveled on Lab Report, #5.Answer #6 and #7 on the Lab Report sheet.。
期末试卷一、单选题。
(每题2分)1、A micrometer screw gauge is used to measure the diameter of a copper wire.The reading with the wire in position is shown in diagram 1. The wire is removed and the jaws of the micrometer are closed. The new reading is shownin diagram 2.What is the diameter of the wire?(2 mark)A 1.90 mmB 2.45 mmC 2.59 mmD 2.73 mm2、The diagram below shows part of the scale on a micrometer screw gauge when its spindle is totally closed.Which of the following is the correct reading for the zero error shown? (2 mark)A、-0.03mmB、-0.47mmC、0.03mmD、0.47mm3、Which of the following pendulums has the shortest period? (2 mark)4、a man throws a ball and the path of its motion is shown below,at which point does the ball travel the slowest? (2 mark)5、A small steel ball falls freely under gravity after being released from rest. Which graph best represents the variation of the height h of the ball with time t ?(2 mark)6、The diagram shows a velocity-time graph for a vehicleThe vehicle, moving at 4.0 m s–1, begins to accelerate at time = 0.What is the vehicle’s acceleration at time = 3.0 s?A 0.67 m s–2B 1.0 m s–2C 1.3 m s–2D 2.0 m s–27、In terms of energy transfer W and charge q, what are the definitions of potential difference (p.d.) and electromotive force (e.m.f.)?8、下列所示旳四种现象中,可用光旳直线传播原理解释旳是A.镜中花B.水中桥C.林中影D.缸中鱼9、已知玻璃旳折射率大于空气旳折射率。
全文分为作者个人简介和正文两个部分:作者个人简介:Hello everyone, I am an author dedicated to creating and sharing high-quality document templates. In this era of information overload, accurate and efficient communication has become especially important. I firmly believe that good communication can build bridges between people, playing an indispensable role in academia, career, and daily life. Therefore, I decided to invest my knowledge and skills into creating valuable documents to help people find inspiration and direction when needed.正文:探究物体在斜面上的运动实验英语作文全文共3篇示例,供读者参考篇1An Experimental Investigation into the Motion of Objects on an Inclined PlaneIntroductionIn our physics class, we were tasked with conducting an experiment to explore the motion of objects on an inclined plane. This concept is not only fascinating from a scientific standpoint but also has numerous real-world applications, from understanding the dynamics of vehicles on slopes to designing efficient ramps and conveyor belts. As a student passionate about understanding the natural world, I was excited to delve into this hands-on learning experience.Theoretical BackgroundBefore diving into the experiment, it was essential to understand the theoretical principles underpinning the motion of objects on an inclined plane. According to Newton's laws of motion, when an object is placed on an inclined surface, it experiences two primary forces: the force of gravity acting vertically downward, and the normal force exerted by the surface perpendicular to the plane.The component of the gravitational force acting parallel to the inclined surface is responsible for causing the object's acceleration down the plane. This component, known as the parallel force, is proportional to the sine of the angle of inclination (θ) m ultiplied by the object's mass (m) and theacceleration due to gravity (g). The equation governing this relationship is:Parallel Force = m × g × sin(θ)Additionally, the acceleration of the object down the inclined plane is independent of its mass and solely depends on the angle of inclination and the acceleration due to gravity. This acceleration can be calculated using the following equation:Acceleration = g × sin(θ)These fundamental principles provided the theoretical foundation for our experiment, allowing us to formulate hypotheses and design an appropriate methodology.Experimental SetupTo conduct the experiment, we assembled the following materials:A sturdy wooden plankVarious objects of different masses (e.g., wooden blocks, metal cylinders)A protractor to measure the angle of inclinationA stopwatch or timerMeter sticks or measuring tapesNotebook and pen for recording observationsThe experimental setup involved positioning the wooden plank on a flat surface and adjusting its angle of inclination using books or blocks as supports. We measured the angle using the protractor and ensured that the surface was smooth and free from obstructions.ProcedureWe started by setting the plank at a specific angle, let's say 30 degrees.One team member held the object at the top of the inclined plane, while another prepared to time its descent using the stopwatch.Upon releasing the object, we recorded the time it took to travel a predetermined distance along the inclined plane.We repeated this process multiple times for the same object and angle, calculating the average time and velocity.Next, we varied the angle of inclination, keeping the same object, and repeated the timing measurements.Finally, we swapped objects of different masses and repeated the entire process for each new object.Data Collection and AnalysisThroughout the experiment, we meticulously recorded our observations, including the angle of inclination, object mass, distance traveled, and time taken for each trial. We then computed the average velocities and accelerations for each combination of angle and mass.To analyze the data, we plotted graphs of velocity versus time and acceleration versus the sine of the angle of inclination. These visual representations allowed us to identify patterns and evaluate the validity of the theoretical equations.Results and DiscussionOur experimental results largely aligned with the theoretical predictions. We observed that the acceleration of an object down the inclined plane was indeed independent of its mass, as predicted by the equation Acceleration = g × sin(θ). The grap hs of acceleration versus sine of the angle followed a linear trend, further confirming this relationship.Moreover, we noted that objects with larger masses experienced greater parallel forces, as expected from theequation Parallel Force = m × g × sin(θ). However, their accelerations remained constant for a given angle, aligning with the theoretical principles.Interestingly, we encountered some minor discrepancies between our experimental data and the theoretical values, which could be attributed to factors such as air resistance, friction, and measurement uncertainties. These deviations highlighted the importance of controlling experimental conditions and accounting for potential sources of error.ConclusionThrough this hands-on experiment, we gained valuable insights into the motion of objects on an inclined plane. We observed firsthand the relationships between acceleration, mass, and the angle of inclination, solidifying our understanding of the theoretical concepts.The experimental process also taught us essential skills in data collection, analysis, and critical thinking. We learned to design controlled experiments, record precise measurements, and interpret results in the context of scientific theories.Moving forward, we can apply the knowledge gained from this experiment to various real-world scenarios, such asanalyzing the motion of vehicles on slopes, optimizing the design of ramps and conveyor belts, or even understanding the dynamics of certain sports and recreational activities.Overall, this experimental investigation into the motion of objects on an inclined plane was an enriching and rewarding experience. It not only deepened our comprehension of physics principles but also cultivated our scientific curiosity and problem-solving abilities, preparing us for future scientific endeavors.篇2Investigating the Motion of Objects on an Inclined PlaneIt was just another typical day in physics class when Mr. Davis announced we would be doing a hands-on experiment to explore the motion of objects on inclined planes. I have to admit, I wasn't exactly thrilled at first. Physics experiments can sometimes be tedious and dull. However, as Mr. Davis explained what we'd be doing, I became more intrigued and even a little excited.The core idea was straightforward enough – we'd be rolling objects down ramps set at different angles and measuring their speeds and acceleration. But Mr. Davis hinted there would besome twists that would make it more engaging than just watching things roll down slopes. He divided us into groups of four, and each group received a plastic ramp, a stopwatch, a meterstick, some masking tape, and two objects – a hollow plastic cylinder and a solid aluminum cylinder of the same size.Once we had our materials, Mr. Davis went over the procedure. First, we would use the masking tape to make evenly spaced lines every 20 cm along the ramp to mark intervals. Then, for each angle we tested, we'd release the hollow cylinder from rest at the top and use the stopwatch to measure its time over each 20 cm interval to determine its speed at different points. We'd repeat this three times and average the results.The first angle seemed fairly tame – just 10 degrees from horizontal. I figured the cylinder would trickle down slowly in that case. But I was in for a surprise! Even at that modest angle, the cylinder quickly built up pretty good speed about halfway down the ramp. Clearly, the old saying "objects in motion tend to stay in motion" wasn't kidding around.After recording temps for the 10 degree trials, we had to tilt the ramp to 20 degrees and repeat. This time, I could definitely notice some serious acceleration happening as the cylinder rolled along. Mr. Davis then went around and checked our data,offering suggestions on techniques like when to start and stop the stopwatch.Once we had successfully timed the hollow cylinder, the real fun began. We switched over to the solid aluminum cylinder of the same diameter and mass. In theory, it should have accelerated at the same rate, assuming we neglected air resistance. However, pretty much every group noticed clear disparities between the hollow and solid cylinders.No matter how carefully we performed the timings, the solid cylinder consistently traveled slower than its hollow counterpart. At first, I figured we must be doing something wrong with our methods. But Mr. Davis assured us this discrepancy was exactly what he expected to see emerge. He then launched into an explanation about rotational inertia and how objects need to expend energy to set spinning motions in addition to linear motions.With the aluminum cylinder's mass concentrated toward its outer edges, it experienced greater resistance to rotation compared to the hollow cylinder. Thus, more of the cylinder's kinetic energy went into overcoming rotational inertia rather than just linear motion, resulting in slower overall speeds. Mind officially blown!Mr. Davis then had us ramp things up further by tilting the ramp to 30 degrees to accentuate the acceleration. Sure enough, the speed disparities between the solid and hollow cylinders became even more pronounced. As we timing technicians sweated through running trials, I realized this experiment had transformed into an engaging exploration of some pretty profound physics concepts.After completing all the ramp angles, Mr. Davis had us process our data into velocity vs time graphs. Seeing the curved lines vividly depict the accelerated motion helped solidify the concepts in a visual way. We analyzed our graphs and used the velocity and position data to calculate the accelerations of the cylinders down the ramps.While Newton's second law specifies that acceleration should depend only on mass and force, not shape or distribution, our numbers confirmed that rotational inertia created real disparities between the hollow and solid cylinders. The temperature was rising in that physics room as our brains worked to connect the experiments to the core concepts!For the finale, Mr. Davis had us investigate how changing the mass affected the acceleration by adding weights to the hollow cylinder. As expected, increasing the mass did reduce theacceleration compared to the unweighted trials, beautifully confirming the force to mass ratio relationship.What started as a seemingly simple experiment turned into an engrossing journey hitting on key topics like kinematics, Newton's laws, energy, rotational dynamics, and data visualization. My eyes were opened to how deceivingly simple setups can provide profound insights when you start plugging in the physics. I'll never look at a hollow cylinder the same way again!As I walked out of class, surprisingly energized instead of drained like after many labs, I felt grateful for a professor committed to creating engaging hands-on experiences. Too often, physics can get bogged down in dry equations disconnected from reality. But Dr. Davis's inclined plane experiment brilliantly revealed how the world actually works through a deceptively simple scenario.I don't know if I'll become a physicist, but I gained an appreciation for the mindset of uncovering truths about nature through well-designed experiments and modeling. Looking back, I'm really glad I didn't just dismiss this as "another lame physics lab." Sometimes the most valuable lessons come from unexpected places if you're willing to lean in with an open mind.Now if you'll excuse me, I need to go roll myself down a few inclined planes to verify some newly sparked inquiries!篇3Investigating the Motion of Objects on an Inclined PlaneAs a high school physics student, one of the most intriguing experiments we conducted was exploring the motion of objects on an inclined plane. This hands-on activity allowed us to witness firsthand the principles of mechanics and gain a deeper understanding of the interplay between forces, acceleration, and motion.The setup was deceptively simple: a long, smooth ramp propped at various angles, a selection of objects with different masses and materials, and a set of timers and rulers to measure distances and durations. However, behind this straightforward apparatus lay a world of fascinating observations and revelations waiting to be uncovered.Our first task was to release a small wooden block from the top of the ramp and observe its behavior. At a shallow angle, the block sluggishly crept down the incline, its motion seemingly defying the laws of gravity. As we increased the angle, the block's descent accelerated, gathering speed with each passing second.This stark contrast piqued our curiosity, prompting us to delve deeper into the underlying principles governing this phenomenon.Through our teacher's guidance and supplementary readings, we learned about the intricate interplay between the forces acting on the block. The weight of the object, represented by its mass and the acceleration due to gravity, pulled it downward. Simultaneously, the normal force exerted by the ramp surface counteracted this downward pull, resolving into components parallel and perpendicular to the incline.The parallel component of the normal force, commonly referred to as the "force of friction," opposed the block's motion, acting as a resistive force. Conversely, the component of the weight force parallel to the ramp provided the driving force, propelling the block forward. As we increased the angle, the driving force grew stronger relative to the frictional force, resulting in the observed acceleration.Armed with this newfound knowledge, we eagerly dove into our next set of experiments. We systematically varied the ramp's angle, meticulously measuring the block's displacement over fixed time intervals. By plotting these data points on graphs, weunveiled the remarkable relationship between the angle of incline and the acceleration of the object.Our findings corroborated the theoretical predictions: the acceleration increased proportionally with the sine of the angle, a direct consequence of the geometric resolution of forces. This validation of mathematical models through empirical evidence filled us with a profound sense of awe and appreciation for the predictive power of physics.Undeterred by our initial success, we pushed our investigation further by introducing objects of varying masses and materials. We observed that while the acceleration remained consistent for objects of the same mass and material, it varied across different compositions. Heavier objects experienced slower accelerations due to the increased frictional forces, while lighter ones zipped down the ramp with greater ease.The concept of friction took on a new dimension when we experimented with different surface materials on the ramp. Rough surfaces, such as sandpaper, significantly impeded the motion, while smoother surfaces facilitated faster accelerations. This revelatory insight highlighted the crucial role of surface properties in determining frictional forces and their impact on motion.As we progressed through our experiments, we encountered instances where our results deviated from theoretical predictions. Rather than being discouraged, these discrepancies fueled our curiosity and sparked lively discussions within our group. We hypothesized potential sources of error, such as imperfections in the ramp surface, air resistance, or measurement inaccuracies, and devised strategies to minimize their impact.One particularly thought-provoking observation emerged when we attempted to release the block from different heights along the ramp. Contrary to our initial expectations, the acceleration remained unaffected by the starting position, as long as the angle of incline remained constant. This counterintuitive finding challenged our intuitive notions and prompted us to reevaluate our understanding of the principles governing motion on inclined planes.Throughout our investigations, we encountered moments of triumph and frustration, successes and setbacks. However, each experience served as a invaluable learning opportunity, sharpening our critical thinking skills, fostering teamwork, and instilling in us a deep appreciation for the scientific method.As we concluded our experiments, we couldn't help but reflect on the broader implications of our findings. The principlesgoverning motion on inclined planes extend far beyond the confines of our classroom, manifesting in diverse natural phenomena and engineering applications. From the design of roller coasters and ski slopes to the construction of ramps and conveyor belts, a thorough understanding of these principles is crucial for optimizing efficiency and ensuring safety.Moreover, our investigation highlighted the importance of empirical observation and experimentation in validating theoretical models. While mathematical equations and simulations provide invaluable insights, their true power lies in their ability to accurately describe and predict real-world phenomena. By bridging the gap between theory and practice, we gained a deeper appreciation for the iterative nature of scientific inquiry and the continuous quest for knowledge.As I look back on this transformative experience, I am filled with a sense of gratitude for the opportunity to engage in hands-on learning and exploratory investigations. The lessons learned transcended the confines of physics, instilling in me a passion for lifelong learning, a commitment to intellectual curiosity, and a profound respect for the elegance and complexity of the natural world.。
A-level物理:CIE版教材目录中英文对照(一)1、Kinematics-describingmotion(第一章:运动学:描述运动)Speed(速率);Distance and displacement,scalar and vector(距离与位移,标量与矢量)Speed and velocity(速率与速度);Displacement-time graphs(位移-时间图像);Combining displacements(位移的合成);Combining velocities(速度的合成)。
2、Accelerated motion(第二章:加速运动)The meaning of acceleration(加速度定义);Calculating acceleration(加速度计算);Units of acceleration(加速度单位);Deducing acceleration(加速度推导);Deducing displacement(位移推导);Measuring velocity and acceleration(速度和加速度测量);Determining velocity and acceleration in the laboratory(在试验中确定速度与加速度);The equations of motion(运动方程);Deriving the equations of motion(运动方程的推导);Uniform and non-uniform acceleration(匀后非匀加速运动);Acceleration caused by gravity(自由落体运动);Determining g(确定重力加速度g);Motion in two dimensions-projectiles(两维运动 - 平抛运动);Understanding projectiles(平抛运动的理解)。
Robust and Efficient Computation of the Closest Point on a Spline Curve Hongling Wang,Joseph Kearney,and Kendall AtkinsonAbstract.Parametric cubic spline curves are commonly used tomodel the geometry of road surfaces in real-time driving simulators.Roads are represented by space curves that define a curvilinear frameof reference in which three-dimensional points are expressed in coordi-nates of distance along the curve,offset from the central axis,and loftfrom the road surface.Simulators must map from global Cartesiancoordinates to local road coordinates at very high frequencies.A keycomponent in this mapping is the computation of the closest point onthe central axis of the road to a three-dimensional point expressed inCartesian coordinates.The paper investigates a two-step method thatexploits the complementary strengths of two optimization techniques:Newton’s method and quadratic minimization.§1.IntroductionParametric cubic spline curves provide a natural basis for modeling the geometry of road surfaces in real-time driving simulators.The road model is used by programs that control the behavior of autonomous vehicles and pedestrians populating the virtual urban environment.In many simula-tors,roads are represented by space curves that define a central axis or spine of a ribbon-like surface[6].A surface normal is defined at each point on the curve allowing the ribbon to twist about its spine.The rib-bon establishes a curvilinear coordinate system in which points in space are expressed in coordinates of distance along the central axis,offset from the axis,and loft from the road surface.The ribbon structure provides a natural coordinate frame for computing the local geometry of navigable surfaces.This geometry is important for wayfinding of autonomous agents and also determines the spatial relationships among agents.Curve and Surface Design:Saint-Malo2002397 Tom Lyche,Marie-Laurence Mazure,and Larry L.Schumaker(eds.),pp.397–405. Copyright o c2003by Nashboro Press,Brentwood,TN.ISBN0-9728482-0-7.All rights of reproduction in any form reserved.398H.Wang,J.Kearney,and K.Atkinson While some simulation computations are most effectively implement-ed using ribbon coordinates,other computations are most effectively im-plemented using Cartesian coordinates.For example,behavior modulesthat track roads and avoid obstacles,are most easily expressed with ob-ject locations represented in ribbon coordinates.However,the dynamics code that computes object motions from control parameters set by objectbehaviors is most simply written in Cartesian coordinates.Because these computations are performed at very high frequency,it is essential to haveefficient and robust code to map from ribbon coordinates to Cartesian co-ordinates and to compute the inverse mapping from Cartesian coordinates to local ribbon coordinates.The mapping from Cartesian to ribbon coordinates is frequently a se-rious computational bottleneck in driving simulators.The key component in this mapping is the computation of the closest point on the central axisof the ribbon to a three-dimensional point expressed in Cartesian coor-dinates.Conventional optimization techniques such as Newton’s methodor quadratic minimization work well most of the time.However,we’vefound that the standard techniques consistently fail(converge very slowly or diverge)at a small number of points on many ordinary curves.Becauseof the frequency with which the mappings are performed(i.e.thousandsof times a second for a modestly complex simulation)even these rare problematic instances are likely to occur with regularity.This leads tounacceptable computational delays and can halt a simulation if the opti-mization procedure is not terminated.To address weaknesses with standard optimization techniques,wepresent a two stage technique that combines quadratic minimization and Newton’s method.§2.The ProblemA parametric cubic spline curve modeling the centerline of a curved roadcan be expressed as[5],(x(s),y(s),z(s)),0≤s≤L,where s denotes arc length,L is the arc length of the entire spline curve,and x(s),y(s),and z(s)are cubic spline functions with equally spacedbreakpoints{s0,s1,...,s n}with s0=0and s n=L.The functions x,y, and z are C2on[0,L].At each time step of a simulation,the dynamics module computes a new position in Cartesian coordinates for every moving object.Given an object’s location in Cartesian coordinates,our problem is tofind the closest point on a road centerline to the object.Let p0=(x0,y0,z0)be the position of an object(see Figure1).Thesquare of the distance between position p0and position(x(s),y(s),z(s))Closest Point on a Spline399Fig.1.Vector p1p0and the tangent vector of a cubic spline curve on p1.on a spline curve isD(s)=(x(s)−x0)2+(y(s)−y0)2+(z(s)−z0)2,(1) where x(s),y(s),and z(s)are cubic spline functions of the parameter s. The value s∗that minimizes D(s)determines p1=(x(s∗),y(s∗),z(s∗)),p1p0is the closest point to p0on the cubic spline curve.The vector−−→perpendicular to the tangent vector of the cubic spline curve on p1.The distance between p0and p1,which is the length of the vector−−→p1p0,is the smallest distance between the position p0and the cubic spline curve.We approach the mapping computation as an optimization problem. To meet the stringent demands of real-time simulation,it is important that the selected optimization method converges to an accurate solution very quickly.While the average speed of this computation matters,it is of paramount importance that the maximum time does not overrun the time allotted for a simulation step by the scheduler.Thus,the demands of the application call for a method that is accurate,fast,and almost never fails. With these requirements in mind,we examine three optimization tech-niques:Newton’s method,quadratic minimization,and a new technique that combines quadratic minimization and Newton’s method.§2.Quadratic Minimization MethodQuadratic minimization uses quadratic interpolation to minimize a one-variable function,in our case D(s).Suppose that˜s1,˜s2,and˜s3are given as initial estimates of s∗,the value that optimizes D(s).The quadratic400H.Wang,J.Kearney,and K.Atkinson polynomial that interpolates D(s)at˜s1,˜s2,and˜s3is given by,P(s)=(s−˜s2)(s−˜s3)(˜s1−˜s2)(˜s1−˜s3)D(˜s1)+(s−˜s1)(s−˜s3)(˜s2−˜s1)(˜s2−˜s3)D(˜s2)+(s−˜s1)(s−˜s2)(˜s3−˜s1)(˜s3−˜s2)D(˜s3).The minimum of P(s)is used to approximate the minimum of D(s).The minimum of P(s)is given bys∗,k=12·y23D(˜s1)+y31D(˜s2)+y12D(˜s3)s23D(˜s1)+s31D(˜s2)+s12D(˜s3),k=1,2,3,···,(2)where s ij=˜s i−˜s j and y ij=˜s2i−˜s2j for i,j∈{1,2,3}.We pick three values from˜s1,˜s2,˜s3,and s∗,k by eliminating the value which gives the largest P(s)among the4values,and continue in a like manner until some error tolerance for P(s)is achieved.It can be shown that with a sufficiently good set of initial guesses,the iteration will converge at a superlinear rate to s∗[3,4].Quadratic minimization needs three initial estimates of s∗.In our application,we usually have a good guess of which segment,[s i,s i+1], contains s∗based on the simulation state at the previous time step.An object typically enters a road at one end or the other(i.e.on thefirst or last segment.)As the object moves along a road,we track its position and velocity.Knowing s∗at the previous step and the object’s velocity, we can predict the value of s∗at the current step.Because the spline segments are all of equal length,we can calculate the index,i,of the segment containing the initial estimate,i= s∗,0l,(3)where l is the arc length of each segment of the spline curve.We use asour three initial estimates of s∗the values s i,s i+s i+12,and s i+1.When s∗lies near a segment boundary,error in the initial estimate may cause us to choose the wrong segment.This is detected when the iteration converges to a value outside the segment boundaries[s i,s i+1]. In this case,we attempt to solve s∗on adjacent segments.Sometimes we are unable to predict s∗from previous states(for ex-ample,when an object moves from offroad terrain to a road.)When we are unable to compute a good initial estimate,we attempt to solve for s∗on each successive segment of the curve.Closest Point on a Spline401Fig.2.Distance curve between p0and points on the spline segment in Figure1.The road curves we seek to model are typically smooth and have low curvature relative to their width.The width of a road surface must be less than the radius of curvature of the road axis spline to prevent self intersections.As a consequence,there is a single nearest point on the spline for all points on the surface of a road.Thus,the mapping from Cartesian coordinates to ribbon coordinates is unique.We expect quadratic minimization method to work well for our prob-lem because the minimum distance between a point p0on the surface of the road and the spine of the road is normally well-approximated by a parabola.For example,Figure2graphs the minimum distance from a point p0to a spline segment.We tested the quadratic minimization method on a variety of cubic spline curves representative of road curves used in driving simulation.For each curve,we randomly generated a cloud of points near the curve and computed,for each of these points,the closest point on the curve.Ex-perimental results showed that quadratic minimization converged to an accurate solution in fewer than8iterations for about one third of the test points.In the remaining cases,a solution was usually found although it sometimes took hundreds of iterations to converge.In a small percentage of cases the method diverged and no solution was found.Closer exam-ination of cases in which the method diverged or converged very slowly revealed that the early iterations made progress toward a solution,but as the optimal value was approached it jumped about in a small interval surrounding the optimum.§3.Newton’s MethodThe value s∗that minimizes D(s)in formula(1)satisfies D (s∗)=0.We can use Newton’s method tofind a root of this equation.This leads to402H.Wang,J.Kearney,and K.Atkinson the iteration formulas∗,m+1=s∗,m−D (s∗,m)D (s∗,m),m=0,1,2, (4)Similar to the quadratic method,the initial estimate s∗,0is based on the value of s∗computed on the last time step of the simulation.Likewise, adjacent segments are considered when the method returns a value out of the initial segment’s range.This method is quadratically convergent[4].We implemented Newton’s method to optimize the distance expres-sion(1).We tested Newton’s method with the same curves and sample points that we used to test quadratic minimization.Experiments showed Newton’s method converges in most,but not all,cases.Generally,New-ton’s method found a solution more quickly than quadratic minimization –usually in3to4iterations.However,for some of the sample points Newton’s method required dozens or even hundreds of iterations to con-verge.The problem cases seem to be caused by poor initial estimates. When,after a slow start,the method approached the optimal value it converged very quickly to thefinal solution.In a very small number of cases,Newton’s method diverged jumping to values far away from the optimal value.§biningNewton’s Method and Quadr atic Minimization Neither Newton’s method nor quadratic minimization perform satisfacto-rily for real-time simulation.The average rate of convergence of quadratic minimization is too slow for our application.Both methods are plagued by the occurrence of cases in which convergence is unacceptably slow and both methods diverge in a small number of cases.The good news is that Newton’s method works well when given a sufficiently good initial estimate;sometimes an accurate solution is found in a single iteration.This is because Newton’s method takes thefirst-order term and second-order term of Taylor’s expansion while truncating the higher order terms.Therefore,as we approach the optimal value with formula(4),the error caused by truncating higher order terms is quite small.On the other hand,the error can be quite large when the initial estimate is far away from the optimal value.Comparing the convergence properties of the two methods,we observe that their strengths complement one another.Quadratic minimization is good at refining coarse estimates.Newton’s method is good at converging to the optimal value quickly with a good initial guess.This leads us to consider combining the two methods to leverage their complementary strengths in overcoming their weaknesses.The composite algorithm begins with quadratic minimization method tofind a rough estimate that serves as an initial guess for Newton’s method.Closest Point on a Spline403Based on our experiments,wefind that quadratic minimization gen-erallyfinds an acceptable initial value for Newton’s method after four iterations.By using four iterations,we allow the possibility of updat-ing all of the initial values.Each iteration in the quadratic minimization method produces a new estimate of the optimal value and throws away the worst of the current estimates.After3iterations we have produced 3new guesses.If some or all of the3initial values are poor estimates of the optimal value,we have an opportunity to replace them all with new, better estimates and base the4th estimate on these new values.§5.ResultsWe demonstrate the performance of quadratic minimization,Newton’s method,and our new composite method on the parametric spline curve shown in Figure3.The curve is composed of8parametric cubic segments. We randomly generated30,000points in a band around the curve and computed,for each point,the nearest point on the spline curve.Methods were initialized with values on the segment,i,from which the s∗to be estimated was selected.Figure4presents the convergence rates for the three methods.The results are summarized in Table1.The termination criteria for all three algorithms was set to|s∗,k+1−s∗,k|≤(s i+1−s i)·10−8where[s i,s i+1]is the range of the parameter value for the spline segment where thefinal solution lies.The most striking aspect of the test results is that the new method found a solution in less than8iterations in all30,000cases.In con-trast,both quadratic minimization and Newton’s method get mired in a significant number of cases.The new method outperforms quadratic mini-mization in every respect;itfinds solutions faster on average and its worst case performance is capped at a reasonable value.For many points,the new method is an iteration or two slower than Newton’s method.How-ever,the tradeoffis that a solution is always found in modest number of iterations.Because of the need to bound the length of a simulation time step,it is highly desirable to minimize the maximum time of component computations.Thus,the elimination of failures and the reduction in the time to compute the hardest cases outweighs the small increase in time for the easy cases.Overall,the new method provides an attractive alternative for real-time applications.§6.ConclusionThe closest point computation is a core component of real-time ground ve-hicle simulation.It forms an essential step in the process of mapping from Cartesian coordinates to road coordinates needed to place synthetic agents on the road network.To satisfy the requirements of real-time simulation, the closest point computation must be efficient and extremely robust.404H.Wang,J.Kearney,and K.AtkinsonFig.3.An cubic spline curve example composed of 8parametric cubic curve segments and some of the randomly chosen points.quadratic minimization Newton’s method algorithm the new algorithmrate of fast convergencedivergence (>8 iterations)rate of slow convergence(<=8 iterations)34.17%89.53%100%65.79% 0.04%10.24% 0.22% 0 0Tab.1.Performance of different methods for the cubic spline curve example in Figure 3.Fig.4.A Histogram displaying,for each of the three methods,the distribution of convergence rates for 30,000test points using the cubic spline curve shown in Figure 3.Closest Point on a Spline405The method presented in this paper is well tailored to the needs of real-time simulation.By combining quadratic minimization and Newton’s method,we’ve found a technique that very reliably converges to an accu-rate solution in a small number of iterations.The method has undergone rigorous testing in our real-time ground vehicle simulator,Hank.In10 months of daily runs(some for periods of many hours)we have had no failures.This practical experience over an extended period of time gives us great confidence in the robustness and usefulness of the approach.Acknowledgments.This work was supported in part through National Science Foundation grants INT-9724746,EAI-0130864,and IIS-0002535. Jim Cremer and Pete Willemsen made significant contributions to the development of the Hank simulator.References1.Atkinson,K.,Modelling a road using spline interpolation,Reportson Computational Mathematics#145,Department of Mathematics, The University of Iowa,(2002).2.Atkinson,K.,An Introduction to Numerical Analysis,John Wiley&Sons,Hoboken,NJ,1989.3.Luenberger,D.,Linear and Nonlinear Programming,Addison-Wesley,Reading,MA,1984.4.Wang,H.,An analytical solution for free-form roads in driving sim-ulation,Technical Report01-04,Department of Computer Science, The University of Iowa,(2001).5.Wang,H.,Kearney,J.,and Atkinson,K.,Arc-length parameterizedspline curve for real-time simulation,5th international conference on Curves and Surfaces,(2002).6.Willemsen,P.,Kearney,J.,and Wang,H.,Ribbon networks for mod-eling navigable paths of autonomous agents in virtual urban environ-ments,to appear in IEEE Virtual Reality Conference,2003.7.Willemsen,P.,Behavior and Scenario Modeling For Real-Time Vir-tual Environments,dissertation,The University of Iowa,2000.Hongling Wang,Joseph Kearney,and Kendall AtkinsonDepartment of Computer ScienceThe University of IowaIowa City,IA52242howang|kearney|*****************.edu。