异步电机直接转矩控制系统及其仿真_曾国树
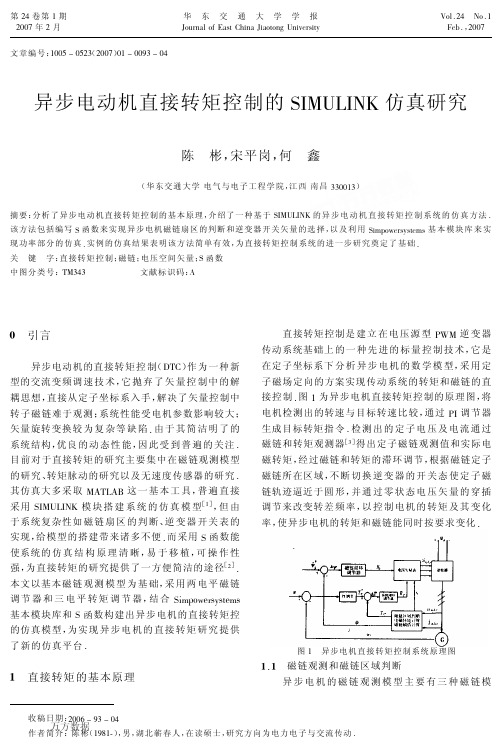
- 格式:pdf
- 大小:194.83 KB
- 文档页数:3

异步电动机直接转矩控制系统仿真对比研究卢秉娟,黄会营,姬宣德(洛阳理工学院电气工程与自动化系,河南洛阳471023)摘要:在详细分析异步电动机传统直接转矩控制(BASIC-DTC)系统和空间矢量调制直接转矩控制(S VM-DTC)系统的基础上,本文利用MATLAB仿真平台分别建立了异步电动机BASIC-DTC系统仿真模型和SVM-DTC系统仿真模型,并对两种仿真模型进行了对比仿真。
仿真结果表明:与异步电动机BASIC-DTC系统相比,异步电动机SVM-DTC系统有效地抑制了转矩和磁链脉动,克服了开关频率不固定的缺陷,同时获得了与BASIC-DTC系统一样的动态响应。
关键词:交流调速系统;传统直接转矩控制;空间矢量调制直接转矩控制;系统仿真中图分类号:TM343 文献标识码:AComparative Study of Induction Motor Direct Torque Control System SimulationLU Bing-juan, HUANG Hui-ying, JI Xuan-de(Department of Electrical Engineering and Automation Luoyang Institute of Science and Technology ,Luoyang HeNan 471023, China)ABSTRACT:On the basis of analyzing in detail the Induction Motor BASIC-DTC System and SVM-DTC System, the BASIC-DTC System simulation model and SVM-DTC System simulation model were established with MATLAB simulation platform In this paper, and two kinds of simulation model were comparably simulated. Simulation results showed that Compared with the BASIC-DTC System, the SVM-DTC System makes the torque and flux ripple reduced, and overcomes the disadvantages of Non-constant switching frequency, and the same dynamic response is also acquired as the BASIC-DTC. KEYWORDS:AC Drive System; BASIC-DTC; SVM-DTC; System Simulation基金项目:河南省教育厅自然科学研究计划项目(2010B470009)1 引言异步电动机直接转矩控制技术是继异步电动机矢量控制技术之后又一高性能的电动机控制方法,它很大程度上解决了矢量控制算法复杂、控制性能易受电机转子参数变化影响等缺点,为感应电动机的高性能控制开辟了崭新方向。

1 直接转矩控制简介直接转矩控制(Direct Torque Control——DTC),国外的原文有的也称为Direct self-control——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制。
直接转矩控制与矢量控制的区别是,它不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的分析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。
这种方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并通过磁链和转矩的直接跟踪实现PWM脉宽调制和系统的高动态性能。
直接转矩控制系统的主要特点有:(1)直接转矩控制是直接在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩。
(2)直接转矩控制的磁场定向采用的是定子磁链轴,只要知道定子电阻就可以把它观测出来。
(3)直接转矩控制采用空间矢量的概念来分析三相交流电动机的数学模型和控制各物理量,使问题变得简单明了。
(4)直接转矩控制强调的是转矩的直接控制效果。
直接转矩控制技术用空间矢量的分析方法,直接在定子坐标系下计算与控制电动机的转矩,采用定子磁场定向,借助于离散的两点式调节(Band-Band)产生PWM 波信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
它省去了复杂的矢量变换与电动机的数学模型简化处理,没有通常的PWM 信号发生器。
它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确。
2 直接转矩控制的理论基础2.1直接转矩控制的原理ψ的正负符号和电磁直接转矩控制系统的基本思想是根据定子磁链幅值偏差ΔSψ所在位置,直接选取合适的转矩偏差ΔTe的正负符号,再依据当前定子磁链矢量S电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩和定子磁链的控制。
直接转矩控制是为电压源型PWM逆变器传动系统提出的一种先进的转矩控制技术,基于该技术的传动系统性能可与矢量控制的异步电动机传动系统性能相媲美。

三相异步电动机直接转矩控制系统仿真报告 Document number:PBGCG-0857-BTDO-0089-PTT1998三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。


目录摘要 (I)1 设计总体思路 (1)1.1主电路的设计 (1)1.2 基本原理 (1)2 单元电路设计 (3)2.1 直接转矩控制系统模型 (3)2.2 转速控制器 (4)2.3 直接转矩控制器 (4)2.4 转矩和定子磁链的计算 (5)2.5 磁通和转矩滞环控制器 (6)2.6 磁链选择器 (6)2.7 开关表 (7)2.8 开关控制模块 (8)3 实验仿真、实验波形记录及分析 (9)4 总结 (12)5 附录 (13)参考文献 (14)1 设计总体思路1.1主电路的设计直接转矩控制系统简称DTC(Direct torque control)系统,是继矢量控制系统之后发展起来的另一种高动态性能的交流电动机变压变频调速系统。
在他的转速环里面,利用转矩反馈直接控制电动机的电磁转矩,因而得名。
直接转矩控制系统的基本思想是根据定子磁链幅值偏差s ψ∆的正负符号和电磁转矩偏差e T ∆的正负符号,再根据当前定子磁链的矢量s ψ所在的位置,直接选取合适的电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩与定子磁链的控制。
系统主电路如图1.1所示,由三相不控桥、交流母线、三相逆变器和异步电机组成,2812DSP 的脉冲信号控制全控器件的导通。
图1.1 系统主电路图1.2 基本原理直接转矩控制系统的原理结构如图1.2示,途中的A R ψ和ATR 分别为定子磁链调节器和转矩调节器,两者均采用带有滞环的双位式控制器,他们的输出分别为定子磁链幅值偏差s ψ∆的符号函数sgn(s ψ)和电磁转矩偏差e T 的符号函数sgn(e T ∆),如图1.2所示。
图中,定子磁链给定*s ψ与实际转速ω有关,在额定转速以下,e T ∆保持恒定,在额定转速以上,*s ψ随着ω的增加而减小。
P/N 为给定转矩极性鉴别器,当渴望的电磁转矩为正时,P/N=1,当渴望的电磁转矩为负时,P/N=0,对于不同的电磁转矩期望值,同样符号函数sgn(e T ∆)的控制效果是不同的。
(完整)三相异步电动机直接转矩控制系统仿真报告编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)三相异步电动机直接转矩控制系统仿真报告)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)三相异步电动机直接转矩控制系统仿真报告的全部内容。
三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
异步电动机直接转矩控制系统的MATLAB仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电动机直接转矩控制系统(Direct Torque Control, DTC)已成为电动机控制领域的重要研究方向。
该控制系统以其快速响应、高鲁棒性和简单的结构特性,在电力驱动、工业自动化、新能源汽车等领域具有广泛的应用前景。
本文旨在通过MATLAB仿真平台,对异步电动机直接转矩控制系统进行深入研究和探讨。
本文将首先介绍异步电动机直接转矩控制的基本原理和主要特点,包括其与传统矢量控制方法的区别和优势。
随后,将详细阐述异步电动机的数学模型,以及DTC系统中转矩和磁链的控制策略。
在此基础上,利用MATLAB/Simulink仿真软件,构建异步电动机DTC系统的仿真模型,并对仿真模型中的关键参数和模块进行详细设计。
本文的重点在于通过仿真实验,分析异步电动机DTC系统的动态性能和稳态性能,探讨不同控制参数对系统性能的影响。
将针对仿真结果中出现的问题和不足,提出相应的改进措施和优化策略,以提高DTC系统的控制精度和稳定性。
本文将对异步电动机直接转矩控制系统的未来发展趋势和应用前景进行展望,为相关领域的研究人员和工程师提供参考和借鉴。
二、异步电动机直接转矩控制系统理论基础异步电动机直接转矩控制系统(Direct Torque Control, DTC)是一种高效的电机控制策略,旨在直接控制电机的转矩和磁链,从而实现快速动态响应和优良的控制性能。
与传统的矢量控制相比,DTC具有算法简单、易于数字化实现、对电机参数变化不敏感等优点。
异步电动机DTC系统的理论基础主要建立在电机转矩和磁链的直接控制上。
在DTC中,通过检测电机的定子电压和电流,利用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)或滞环比较器(Hysteresis Comparator)等控制手段,直接计算出所需的电压矢量,以实现对转矩和磁链的快速调节。
地铁车辆异步电机仿真与直接转矩控制研究作者:刘国栋余朝刚朱文良来源:《物流科技》2024年第05期Simulation Research on Establishing Subway Electric Traction System Based on Simulink摘要:电力牵引系统是地铁列车运行与制动的核心部分,牵引电机主要采用三相交流异步电机进行控制,控制方法多样。
为验证直接转矩控制法在牵引电机中的控制效果,在MATLAB/Simulink仿真设计中采用DTC控制牵引电机的转速,进而控制轨道车辆的车速,完成地铁电力牵引系统的建模。
仿真过程中定子电流正弦曲线规律、定子磁链收敛为规整圆形、转矩控制及时响应,牵引电机稳定运行。
仿真结果表明,采用直接转矩控制法使得城市轨道交通牵引系统具有良好的控制性能。
关键词:轨道车辆;Simulink;电力牵引;直接转矩控制中图分类号:U264.91 文献标志码:A DOI:10.13714/ki.1002-3100.2024.05.013Abstract: Electric traction system is the core part of subway train operation and braking. The traction motor is mainly controlled by three-phase AC asynchronous motor, with various control methods. In order to verify the control effect of direct torque control in traction motors, DTC is used in MATLAB/Simulink simulation design to control the rotational speed of traction motors, thereby controlling the speed of rail vehicles, and completing the modeling of metro electric traction systems. During the simulation process, the stator current sinusoidal curve is regular, the stator flux chainconverges to a regular circle, the torque control responds in a timely manner, and the traction motor operates stably. The simulation results show that using the direct torque control method makes the urban rail transit traction system have good control performance.Key words: rail vehicles; Simulink; electric traction; direct torque control0 引言伴随着经济全球化发展以及中国更深度地参与世界分工,我国城市化进程加快,城市轨道交通成为我国今后发展公共交通的主旋律,为了缓解交通压力,急需加快地铁车辆的研究步伐。
收稿日期:2005-04-281
曾国树 男 1952年生;毕业于华侨大学电气工程与自动化专业,实验室主任,现从事电机与控制专业实验教学工作1
异步电机直接转矩控制系统及其仿真
曾国树 方瑞明
华侨大学信息科学与工程学院,福建泉州(362021)
摘 要 阐述了直接转矩控制的基本数学关系,直接转矩的控制系统构成,并在M ATLA B 环境下进行了仿真。
仿真结果表明该技术具有优异的静、动态性能,非常适合电力牵引,并阐述了直接转矩控制的发展前景。
关键词 电机 直接转矩 仿真
中图分类号TM 343 文献标识码A 文章编号1008-7281(2005)04-0023-03
Si m ulation of D irect -Torque Control Syste m of A synchronousM otor Zeng G uoshu and Fang Rui m ing
Abstract Th is paper i n tr oduces t h e basic m athe m atic re lationsh i p of direc-t torque contro l(DTC ),t h e constructi o n o f direc-t tor que .s contr o l syste m.The si m ulati o n results by usi n g Si m u li n k o fMA tlab i n d icates that this techno logy has pre m i u m dyna m ic and stati c properties and is app licab le to e lectric tracti o n .The fut u re of d irec-t to r que contro l is de -scri b ed .
K ey w ords A synchronousM otor ,d irec-t torque contro,l si m u lation .
1 引言
近年来随着交流控制技术的发展,以定子磁链为控制对象的异步电机直接转矩控制技术正受
到人们的广泛重视。
直接转矩控制(DTC)的基本思想是同时控制异步电机的定子磁链和电磁转矩。
与普通的矢量控制不同,在直接转矩控制闭环中没有电流环。
由于直接转矩控制不象矢量控制那样需要进行旋转3/2变换,所以与矢量控制相比大大地简化了控制算法。
对于一般的直接转矩控制而言,其逆变器开关状态的选择是通过查开关表得到的,因此它不需要进行脉宽调制也能保证转矩的快速响应,同时也能很简便地得到各相输出电压。
而且对于直接转矩控制而言,在高速运行段,除了电机的定子电阻外不需要知道电机的其它参数,所以直接转矩控制对电机参数的依赖度要比矢量控制低。
本文讨论了异步电机直接转矩控制系统,就所遇到的几个问题提出了相应的解决方法。
2 直接转矩控制原理
2.1 异步电机转矩观测模型
在静止两相坐标系下(其直轴A 轴在定子A 相轴线上),异步电机的定、转子磁链如下 定子磁链:7s =(L m +L R s )i s +L m i r (1) 转子磁链:7r =(L m +L R r )i r +L m i s (2) 气隙磁链:7m =L m i s +L m i r
(3)
式中,L m )互感;L R s )定子漏感;L R r )转子漏感;i s )定子电流;i r )转子电流。
不同于矢量控制系统,直接转矩控制方法是以定子磁链矢量为基准,并维持其幅值为恒定,其电磁转矩T e 模型可以表示为 T e =K m (7s A i s B -7s B i s A )
(4)
式中,K m )转矩系数;7s A 、7s B 、i s A 、i s B )7s 、i s
在A 、B 轴系上的分量。
根据式(4)构成的转矩观测模型框图如图1所示。
以定子磁链7s 为基准,在定子坐标系中计算定子磁链,受电机参数影响最小,只需知道定子
23
2005年第4期 第40卷(总第125期)
(EXPLOSI ON -PROOF ELECTR I C MAC H I N E )
防爆电机
2.2 异步电机的磁链模型
如下列各式所示,利用定子电压和转速可以获得定子磁链
T r
d 7r A
d t +7r A =L m i s A +T r X r 7r B T r d 7r B d t +7r B =L m i s B +T r X r 7r A
(5)
7s =Q (u s
-i s
R s
)d t 7s A =Q (u s A
-i s A
R s
)d t 7s B
=Q (u s B
-i s B
R s
)d t
(6)
7s A =7r A +L R i s A 7s B =7r B +L R i s B
(7)
式中,T r =L r
R r
)转子时间常数;L r 、R r )转子
电感与电阻;X r )转子角速度;L R =L R s +L R r 。
在输入量是定子电压和转速信号的前提下,由式(5)可以获得转子磁链信号7r A ,由式(6)可以获得电机的定子磁链信号7s A ,再由式(7)可以获得电机的定子电流i s A ,再结合式(4)还能获得电机的转矩信号,因此,该模型能够较好地模拟异步电机的各个物理量。
3 直接转矩控制系统构成
直接转矩控制异步电机调速系统原理图如图2所示。
将检测出的电机转速n 与给定值n
*
比较,经PI D 调节器生成转矩指令信号T e 。
直流母线电压U dc 和相电流i a ,i b 被检测出来后经过静止3/2变换得到两相静止坐标系下的直轴分量和变轴分量即u
A ,i A 和u
B ,i B 。
其定子磁链和电磁转矩分别由式(4
)、式(6
)得到,
定子磁链的位置角为N 7s =
tan
-1
7s A
7s B。
所得到的定子磁链和转矩的估计值与相应的给定值经滞环HC 1,H C 2比较后输出相应的逻辑信号连同定子磁链位置角一起输出给开关表以决定相应桥臂上的开关器件的开关状态。
图2 直接转矩控制系统结构框图
4 仿真结果分析
图3给出了异步电机高速直接转矩控制、磁
场削弱范围内的直接转矩控制的部分仿真结果。
(a)稳态运行时电磁转矩波形
(b)稳态运行时电流波形
(c)负载突然增大时的电磁转矩波形
(d)负载突然增大时的电流波形
(下转36页)
24
术培训班实习期间,在该大学自吸试验台上针对50BPZ-35做了性能试验。
泵被安装在5m 高的固定试验台架上,用电动机联轴器直接驱动,转速2900r /m in ,采用手动秒表计时,对如图4所示6种回流孔面积与位置进行了对比试验。
试验结果
见表2。
A 方案回流孔面积:S A =290mm 2
,位置在
蜗壳中心线最下方,为最佳回流孔面积及位置,其
自吸时间t =79s 。
表2 试验结果
项目
A B C D E F 回流孔面积(mm 2)
290235330250310310自吸时间(s)
79
145
116
150
148
152
图4 回流孔面积与位置
4 结论
(1)对一种特定的外混式自吸泵,目前尚无精确计算其回流孔面积及形状的方法,只能对其估算,在此基础上对比试验,找出最佳回流孔面积、形状、位置。
(2)用橡胶阀关闭回流孔的方法在泵大流量时效果不明显,在额定流量和小流量范围,泵的效率提高2%左右,扬程相应提高1m 左右。
参考文献
[1]
金树德,陈次昌.现代水泵设计方法.兵器工业出
版社,1993.
(上接24页)
(e)定子磁链矢量运动轨迹图3 异步电机直接转矩控制仿真结果
直接转矩控制以新颖的控制思想,简洁明了的系统结构,优良的静、动态性能受到了普遍的注意和得到了迅速的发展。
为了掌握这一先进的控
制技术,我们进行了大量的试验和仿真研究,并成功地将其应用到国产交流传动机车上,实践证明仿真是可信的。
5 直接转矩控制的发展前景
近年来各种高性能硬件的推出,如具有很高开关频率的I G BT 模块,具有高运算速度的数字信号处理器(DSP),也为直接转矩控制系统性能的改进提供了硬件基础,使许多需要很强运算能力,具有很高开关频率的改进方法得以实现。
可以预计,随着硬件性能的改进,各种更复杂、更高频率的控制方法会不断地被提出,控制性能还将会随之有进一步的改善。
由上述可以看出,直接转矩控制未来的发展方向主要在以下两个方面:
(1)为了进一步提高控制性能,消除脉动,交流调速必然向高频化方向发展;
(2)与智能控制相结合,这将使交流调速系统的性能有一个根本的提高,是直接转矩控制的未来。
现在,直接转矩控制已不仅仅应用于交流异步感应电机,它也开始应用于永磁直流电机。
相信在不久的将来,直接转矩控制必将在电机调速的各个方面发挥更大的作用。
参考文献
[1] 李辉,谢剑英,高卫华.感应电机调速系统的变结构控制[J].电器自动化.2000,22(4).
[2] 吴捷,薛峰,杨金明等.基于滑动模控制的感应电动机增益自适应锁相环速度控制[J].电工技术学报.2000,15(2).[3] 王聪.软开关功率变换器及其应用[M ].北京:科学出版社,1999.
36。