劳斯判据例题
- 格式:doc
- 大小:37.50 KB
- 文档页数:2

1.已知单位反馈系统的开环传递函数为 ()(0.11)(0.51)K
G s s s s =++,用劳斯判据分析确
定系统稳定时K 值的范围。
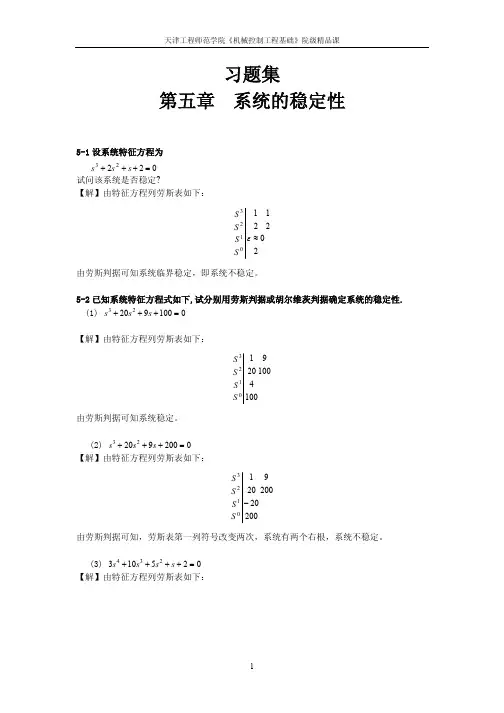
2.已知系统的特征方程为 s 4+8s 3+10s 2+8s +1=0,用劳斯判据判断系统的稳定性。
3.已知系统的特征方程为 s 4+s 3+3s 2+3s +5=0,用劳斯判据判断系统的稳定性。
4.已知三阶系统的特征方程为
a 3s 3+ a 2s 2+ a 1s + a 0=0,式中,a i 为方程的系数,i =0,1,2,3
用劳斯判据分析确定系统稳定的充分必要条件。
5.已知系统的特征方程为 s 4+2s 3+s 2+2s +1=0,用劳斯判据判断系统的稳定性。
6.已知单位反馈系统的开环传递函数为 1136()(1)(1)K
G s s s s =++,用劳斯判据分析确定闭
环系统稳定时K 值的范围。
7.某系统传递函数框图如题图所示,试分析闭环系统的稳定性。
X i (s)
8、闭环系统的传递函数为:
G (s)=23222()2n n n n
s K s s s K ωζωωω++++ 式中,ζ=0.2,n ω=86.6,用劳斯判据分析确定系统稳定时K 值的范围。

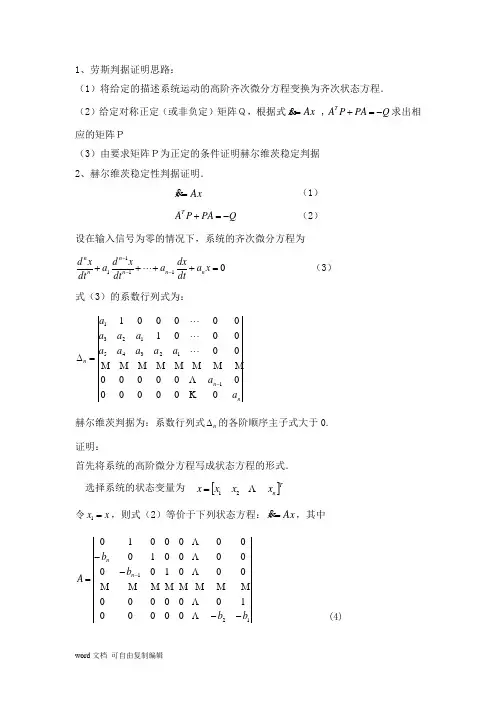
1、劳斯判据证明思路:(1)将给定的描述系统运动的高阶齐次微分方程变换为齐次状态方程.(2)给定对称正定(或非负定)矩阵Q,根据式Ax x= ,Q PA P A T -=+求出相应的矩阵P(3)由要求矩阵P为正定的条件证明赫尔维茨稳定判据2、赫尔维茨稳定性判据证明.Ax x= (1) Q PA P A T -=+ (2)设在输入信号为零的情况下,系统的齐次微分方程为01111=++⋅⋅⋅++---x a dtdx a dt x d a dt x d n n n n n n (3) 式(3)的系数行列式为:n n n a a a a a a a a a a a 0000000000000000010000011123451231-⋅⋅⋅⋅⋅⋅⋅⋅⋅=∆ 赫尔维茨判据为:系数行列式n ∆的各阶顺序主子式大于0.证明:首先将系统的高阶微分方程写成状态方程的形式.选择系统的状态变量为 []T n x x x x 21=令x x =1,则式(2)等价于下列状态方程:Ax x= ,其中 1210000010000000001000000100000010b b b b A n n----=-(4)该矩阵特点是:主对角线上除最后一个元素外,其余元素均为0;主对角线以上各元素为1;主对角线以下各元素从第二行开始依次为-bn 到-b1。
其次,应给定矩阵Q,并根据式(2)去求矩阵P设⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=21200000000b Q (5) 这是一个对称非负定矩阵,由此可知李雅普诺夫函数的导数为 2212nT x b Qx x V -=-= 。
只要x1,x2,…,xn 不全都为零,则0≠n x ,于是()x V 不可能恒为零.所以按式(4)选定的矩阵Q是合理的.再假设矩阵P是对角线矩阵⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=-121000000000000p p p p P n n (6) 将式(4)、式(5)、式(6)代人式(2),即可得 ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=-11212112000000000000b b b b b b b b b P n n 最后检验矩阵P的正定性.如欲系统的半衡点是大范围渐近稳定的,则矩阵P应是正定的,亦即矩阵P主对角线上各元素均应大于零,即有 0,0,012121>>>b b b b b b n 。

劳斯判据的证明及应用劳斯判据(Rayleigh's criterion)是描述两个正交振动的符合条件的充分必要条件。
它由英国物理学家勒克·埃尔斯利·劳斯(Lord Rayleigh)于1879年提出,并被广泛应用于光学、声学、信号处理等领域。
首先,我们来推导劳斯判据的证明。
假设有两列正交的振动,分别用x(t)和y(t)表示,其中t表示时间。
为了方便计算,我们可以将振动表示为复指数形式:x(t) = Re [ Xexp(iωt) ]和y(t) = Re [ Y exp(iωt) ],其中X和Y是复振幅,ω是角频率。
我们定义振动的互强度(cross-intensity)为Ix,y(t) =x(t)y*(t),其中y*表示y的复共轭。
根据定义,我们有:Ix,y(t) = Re [ X exp(iωt) Y* exp(-iωt) ] = Re [ XY* ]为了计算Ix,y(t)的平均值,我们需要对振动周期T进行时间平均:<Ix,y> = (1/T) ∫[0,T] Ix,y(t) dt将Ix,y(t)代入上式,并利用Euler公式(exp(iθ) = cosθ + isinθ)展开,可以得到:<Ix,y> = (1/T) ∫[0,T] Re [ XY* ] dt= (1/T) Re [ X∫[0,T] Y* dt ]= (1/T) Re [ X∫[0,T] Re [ Y* ] dt ]根据劳斯判据的定义,<Ix,y>=0,因此我们有:Re [ X∫[0,T] Re [ Y* ] dt ] = 0由于X是任意复振幅,我们可以独立地选取它的实部和虚部分别为1和0。
这样,上式可以简化为:Re [ ∫[0,T] Re [ Y* ] dt ] = 0我们知道,对于任意实函数f(t),其实部的积分与f(t)的本征函数cos(ωt)正交。
∫[0,T] Re [ Y* ] dt = 0这就是劳斯判据的证明,根据这个证明,我们可以得到劳斯判据的应用。
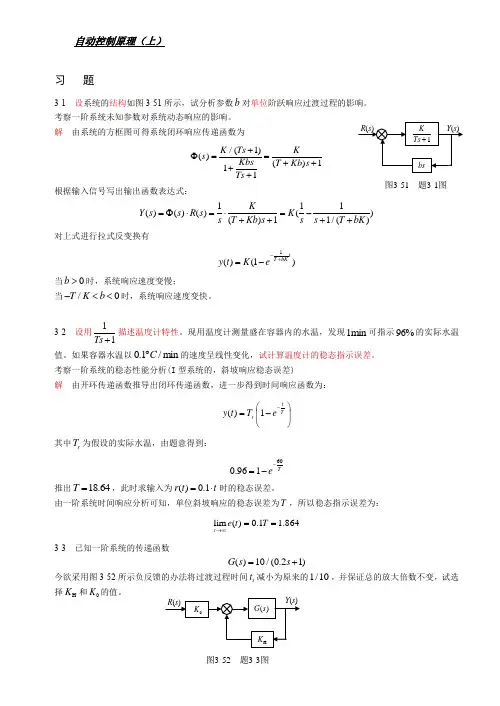
自动控制原理(上)习 题3-1 设系统的结构如图3-51所示,试分析参数b 对单位阶跃响应过渡过程的影响。
考察一阶系统未知参数对系统动态响应的影响。
解 由系统的方框图可得系统闭环响应传递函数为/(1)()()111K Ts Ks Kbs T Kb s Ts +Φ==++++ 根据输入信号写出输出函数表达式:111()()()()()11/()K Y s s R s K s T Kb s s s T bK =Φ⋅=⋅=-++++对上式进行拉式反变换有1()(1)t T bKy t K e-+=-当0b >时,系统响应速度变慢;当/0T K b -<<时,系统响应速度变快。
3-2 设用11Ts +描述温度计特性。
现用温度计测量盛在容器内的水温,发现1min 可指示96%的实际水温值。
如果容器水温以0.1/min C ︒的速度呈线性变化,试计算温度计的稳态指示误差。
考察一阶系统的稳态性能分析(I 型系统的,斜坡响应稳态误差)解 由开环传递函数推导出闭环传递函数,进一步得到时间响应函数为:()1t T r y t T e -⎛⎫=- ⎪⎝⎭其中r T 为假设的实际水温,由题意得到:600.961Te-=-推出18.64T =,此时求输入为()0.1r t t =⋅时的稳态误差。
由一阶系统时间响应分析可知,单位斜坡响应的稳态误差为T ,所以稳态指示误差为:lim ()0.1 1.864t e t T →∞==3-3 已知一阶系统的传递函数()10/(0.21)G s s =+今欲采用图3-52所示负反馈的办法将过渡过程时间s t 减小为原来的1/10,并保证总的放大倍数不变,试选择H K 和0K 的值。
解 一阶系统的调节时间s t 与时间常数成正比,则根据要求可知总的传递函数为10()(0.2/101)s s Φ=+由图可知系统的闭环传递函数为000(10()()1()0.211010110()0.21110H HHHK G s K Y s R s K G s s K K K s s K ==++++==Φ++)比较系数有101011011010HHK K K ⎧=⎪+⎨⎪+=⎩ 解得00.9,10H K K ==3-4 已知二阶系统的单位阶跃响应为1.5()1012sin(1.6+53.1t y t e t -=-)试求系统的超调量%σ,峰值时间p t ,上升时间r t 和调节时间s t 。


劳斯表出现全零行辅助方程例题劳斯表出现全零行辅助方程例题一、问题介绍在研究线性代数或线性方程组的时候,我们经常会遇到劳斯表这个工具。
它是一种用于求解线性方程组的实用工具,可以帮助我们快速、有效地得到方程组的解。
然而,在使用劳斯表的过程中,有时会遇到全零行的情况,这给我们的计算带来了一些困扰。
本文将通过一个具体例题来说明如何处理劳斯表出现全零行的情况。
二、例题描述假设我们有一个三元一次方程组:\[\begin{cases}x + y + z = 3 \\2x - y + 3z = 7 \\3x - y + az = a + 5\end{cases}\]我们要求解该方程组。
三、解题过程1. 构造劳斯表根据例题描述,我们可以依次列出方程组的系数矩阵和增广矩阵。
系数矩阵为:\[A=\begin{bmatrix}1 & 1 & 1 \\2 & -1 &3 \\3 & -1 & a\end{bmatrix}\]增广矩阵为:\[B=\begin{bmatrix}3 \\7 \\a+5\end{bmatrix}\]接下来,我们可以开始构造劳斯表。
2. 构造劳斯表的过程中出现全零行根据劳斯表的构造方法,我们依次进行行变换,将系数矩阵转化为阶梯形矩阵。
对于例题中的系数矩阵A,我们进行以下行变换:- R2 = R2 - 2R1- R3 = R3 - 3R1得到新的系数矩阵A'为:\[A'=\begin{bmatrix}1 & 1 & 1 \\0 & -3 & 1 \\0 & -4 & a-3\end{bmatrix}\]继续进行行变换,将系数矩阵A'转化为阶梯形矩阵。
对于例题中的系数矩阵A',我们进行以下行变换:- R3 = R3 - \frac{4}{3}R2得到新的系数矩阵A''为:\[A''=\begin{bmatrix}1 & 1 & 1 \\0 & -3 & 1 \\0 & 0 & a-4\end{bmatrix}\]观察到a-4仍为未知数,我们继续进行行变换。
劳斯判据的证明及应用一.劳斯判据的证明设线性系统特征方程为23101231()n n n n P s p p s p s p s p s p s --=++++++(1.1),建立一个与特征方程系数有关的矩阵R (P )(劳斯表与教材所列有所不同,将在本文证明部分最劳斯判据:R(P)的第一列各值都为正时由特征方程(1.1)表征的线性系统稳定。
证明:设23+0246()P s p p s p s p s =++++ ,23-1357()P s p p s p s p s =++++,则22()()()P s P s sP s +-=+(1.2)。
令0+=P P ,1-=P P ,并令121001()((0)()(0)())Ps s P P s P P s -=- ,容易求得 1001(0)()(0)()P P s P P s -的常数项为0,则2()P s 为多项式。
类似地,归纳可得:11221()((0)()(0)())k k k k k P s s P P s P P s -----=- (3)k ≥ 。
下面我们通过两个引理来证明劳斯判据。
引理1.R P ()第1列的第k+1行元素等于()k P s 的常数项。
劳斯判据等同于01(0),(0),,(0)n P P P 都为正。
证明:由定义可得00(0)P p = ,11(0)P p = ,21203(0)P p p p p =- 。
则引理1在k=0,1,2时得证。
假设3k ≥ 时引理1依然成立,则R (P )第k 行和第k+1行的元素可分别表示为下列多项式的系数:11,01,1()k k k P s p p s ---=++,,0,1()k k k P s p p s =++,由1k P + 的定义可得1,01,110,1(0)k k k k k P p p p p +--=-, ,而这恰好是R(P)第一列第k+2行的元素。
引理1得证。
定义2223121120331405()R(s)()()()()Q s P s sP s p p p p p s p s p p p p s ∈=+=+-++-+由()P s 的定义易知Q 的最高阶最大为n-1.我们姑且假设1n p ≠ ,下面给出引理2: 引理2.下述表达等效:(1) 特征方程P(s)表示的线性系统稳定且0n p > 。
在应用劳斯判据时,有可能会碰到以下两种特殊情况。
·劳斯表某一行中的第一项等于零,而该行的其余各项不等于零或没有余项,这种情况的出现使劳斯表无法继续往下排列。
解决的办法是以一个很小的正数来代替为零的这项,据此算出其余的各项,完成劳斯表的排列。
若劳斯表第一列中系数的符号有变化,其变化的次数就等于该方程在S右半平面上根的数目,相应的系统为不稳定。
如果第一列上面的系数与下面的系数符号相同,则表示该方程中有一对共轭虚根存在,相应的系统也属不稳定。
例已知系统的特征方程式为试判别相应系统的稳定性。
解:列劳斯表
由于表中第一列上面的符号与其下面系数的符号相同,表示该方程中有一对共轭虚根存在,相应的系统为不稳定。
·劳斯表中出现全零行
则表示相应方程中含有一些大小相等符号相反的实根或共轭虚根。
这种情况,可利用系数全为零行的上一行系数构造一个辅助多项式,并以这个辅助多项式导数的系数来代替表中系数为全零的行。
完成劳斯表的排列。
这些大小相等、径向位置相反的根可以通过求解这个辅助方程式得到,而且其根的数目总是偶数的。
例如,一个控制系统的特征方程为
列劳斯表
由于这一行全为0,用上一行组成辅助多项式
由上表可知,第一列的系数均为正值,表明该方程在S右半平面上没有特征根。
令F(s)=0,
求得两对大小相等、符号相反的根,显然这个系统处于临界稳定状态。
§3 时域分析法3.1 重点知识一、一、二阶系统的动态响应1、一阶系统设一阶系统的传递函数为:()1Ks Ts Φ=+,则一阶系统的单位阶跃响应为: /()(1)t T h t K e -=-其中,T 为一阶系统的时间常数。
2、二阶系统设二阶系统的传递函数为:222()2n n ns s s ωξωωΦ=++,则二阶欠阻尼系统的单位阶跃响应为:()1)n t d h t t ξωωβ-=-+其中,ξ-阻尼比,n ω-无阻尼振荡频率,d ω-阻尼振荡频率,n σξω=衰减系数,且d ωω=arccos βξ=。
二、二阶系统运动形态三、一、二系统的动态性能四、系统的稳定性1、概念:设一线性定常系统原处于某一平衡状态,若它受到某一扰动作用而偏离原来的平衡状态,当此扰动撤消后,系统仍能回到原有的平衡状态,则称该系统是稳定的。
反之,系统为不稳定2、稳定性条件1、必要条件:系统特征方程式的各项系数均为正值,且无零系数”。
2、充要条件:1)脉冲响应函数收敛;2)闭环特征方程式的根需都位于S 的左半平面。
3、劳斯判据如果劳斯表中第一列的系数均为正值,则其特征方程式的根都在S 的左半平面,相应的系统是稳定的。
4、劳斯判据特殊情况1)劳斯表某一行中的第一项等于零 2)劳斯表中出现全零行 五、系统稳态误差1、定义:稳定系统误差的最终值。
稳态误差表示系统的控制精度。
2、计算:0()lim ()lim ()ss ss t s e e t sE s →∞→∞==系统稳态误差:1lim ()lim ()()lim v s ssvs s s R s esG s H s K s+→→→⎡⎤⎣⎦==+表3.3 一、二阶系统稳态性能3.2 基本要求1、了解一阶系统的数学模型和典型响应的特点,会计算一阶系统动态性能指标。
2、理解二阶系统的数学模型和典型响应的特点,熟练掌握二阶欠阻尼系统动态性能指标的计算和系统特征参数确定。
第3章 线性系统的时域分析法例1 一个温度计插入100℃水中测温,经3min 后,指示95℃,如果温度计可视作一个一阶环节且1=K ,求:1. 时间常数T ;2. min 1=t 时,单位阶跃响应是多少?3. 如果给该容器加热,使容器内水温以1.0℃s /的速度匀速上升,当定义)()()(t c t r t e -=时,温度计的稳态指示误差有多大?解:1. 求时间常数T 。
解法1. 根据调节时间的定义,有m in 33==T t s min 1=T解法2. 依题意1=K ,一阶环节的标准数学模型为111)()()(+=+==Ts Ts K s R s C s G输入信号为)(1100)(t t r ⋅=,即s s R 100)(=,故有)111(10010011)(11)(T s s sTs s R Ts s C +-=⋅+=+=对其进行拉氏反变换,有)e1(100)(Tt t c --= 依题意 )e1(100953T--=解得 m i n 1=T 2. 输入信号为)(1)(t t r =,即ss R 1)(=,则有111111)(11)(+-=⋅+=+=s s ss s R s s Ctt c --=e1)(min 1=t 时632.0e1)(1=-=-t c3. 水温以1.0℃s /的速度匀速上升,表示输入信号为斜坡信号t t r 1.0)(=,即21.0)(ss R =。
一阶系统稳定,根据误差的定义)()()(t c t r t e -=,有)1(1.0)(1)()()()()()(+=+=-=-=s s s R s s s R s G s R s C s R s E因为)(s E 在s 平面右半平面及虚轴上(除原点外)解析,满足终值定理的应用条件,故有1.0)1(1.0lim )(lim )(lim 00=+⋅===→→→s s s s sE t e e s s t ss ℃例2 已知二阶系统的单位阶跃响应为)1.536.1sin(e5.1210)(2.1︒+-=-t t h t试求系统的超调量%σ、峰值时间p t 和调节时间s t 。
劳斯判据的简单证明劳斯判据是一个常用的数学工具,用于判断多项式方程是否有重根。
劳斯判据的证明可以通过使用辗转相除法和多项式的根-系数关系,以下是一段大致1200字的该定理证明的简要陈述:假设我们有一个次数为n的多项式方程:$$f(x) = a_nx^n + a_{n-1}x^{n-1} + \cdots + a_1x + a_0$$其中 $a_i$ 是实数系数,且 $n \geq 1$。
我们想要证明,如果 $a_0, a_1, \ldots, a_n$ 是实数且满足劳斯条件,则方程在实数域上没有重根。
我们可以这样证明:首先,我们可以使用辗转相除法,将给定多项式方程表示为两个较小次数的多项式的乘积。
首先,我们令$f_0(x)=f(x)$,然后为了简化符号,令$f_{-1}(x)=0$,$f_{-2}(x)=0$。
然后我们使用辗转相除法的步骤,逐次计算出$f_{-2}$,$f_{-1}$,$f_0$的结果。
对于每个步骤,我们可以通过使用以下欧几里得除法规则来计算:$$f_{k-2} = q_kf_{k-1} + f_k$$其中$q_k$是多项式$f_{k-2}$除以$f_{k-1}$的商。
我们重复上述步骤,直到得到一个次数为2的多项式$f_2$,即:$$f_0=q_1f_{-1}+f_1$$$$f_1=q_2f_{0}+f_2$$$$\cdots$$我们注意到,最后两步得到的结果是次数为2的多项式$f_2$和$f_1$,且$f_2$不为0。
接下来,我们注意到,在劳斯条件成立的前提下,多项式 $f_{k-2}$ 和 $f_{k-1}$ 的符号不相同,对于 $k = 2, 3, \ldots, n$。
我们可以通过辗转相除法的过程证明这一点。
这意味着对于 $k = 2, 3, \ldots, n$,我们有 $f_{k-2}(x)f_{k-1}(x) < 0$。
接下来,我们注意到$f_{k-1}(x)f_{k}(x)>0$,这是因为$f_{k-1}(x)$和$f_{k}(x)$必须具有相同的符号,否则它们的乘积不可能是一个正数。
3-17 已知单位负反馈系统的开环传递函数为:)
2)(1()(++=
s s s K s G ,试应用劳斯判据确定欲使闭环系统稳定时开环放大倍数K 的取值范围 解:由开环传递函数可得到系统特征方程:0232
3=+++K s s s ,写出劳斯表 K s K s K s s 0
1
2
3
32321- 则有03-
20>>K K 且 所以60<<K
补充题:设系统特征方程为05025482422
345=--+++s s s s s ;试用劳斯稳定判据判别系统稳定性,并确定在右半平面根的个数及纯虚根
解:列出劳斯表: 50
07.11250
24096
8000
504822524101
234
5
----s s s s s s 由此可看出系统不稳定,在右半平面根的个数为1,同时存在共轭虚根
求解辅助方程可得到共轭虚根05048224=-+s s ,令y s =2
则有0504822=-+y y 解得y=1,-25
j s s 5,14,32,1±=±=
其它题型:给出开环传递函数,求解系统稳定性,并判断在右半平面根的个数
1、由开环传递函数写出闭环传递函数,进而得到系统特征方程
2、根据特征方程写出劳斯阵列,并判断系统稳定性
3、第一列符号改变的次数为s右半平面根的个数
4、若存在全0行,则有共轭虚根,可根据辅助方程求得共轭虚根。