5第二章 数字控制系统分析-稳定性与稳态性能分析
- 格式:ppt
- 大小:16.79 MB
- 文档页数:47
实验二:系统稳定性和稳态性能分析主要内容:自动控制系统稳定性和稳态性能分析上机实验目的与要求:熟悉 MATLAB 软件对系统稳定性分析的基本命令语句 熟悉 MATLAB 软件对系统误差分析的 Simuink 仿真 通过编程或 Simuink 仿真完成系统稳定性和稳态性能分析一 实验目的1、研究高阶系统的稳定性,验证稳定判据的正确性;2、了解系统增益变化对系统稳定性的影响;3、观察系统结构和稳态误差之间的关系。
二 实验任务1、稳定性分析欲判断系统的稳定性,只要求出系统的闭环极点即可,而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用MATLAB 中的tf2zp 函数求出系统的零极点,或者利用root 函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。
(1)已知单位负反馈控制系统的开环传递函数为0.2( 2.5)()(0.5)(0.7)(3)s G s s s s s +=+++,用 MA TLAB 编写程序来判断闭环系统的稳定性,并绘制闭环系统的零极点图。
(2)已知单位负反馈控制系统的开环传递函数为( 2.5)()(0.5)(0.7)(3)k s G s s s s s +=+++,当取k =1,10,100用MA TLAB 编写程序来判断闭环系统的稳定性。
只要将(1)代码中的k 值变为1,10,100,即可得到系统的闭环极点,从而判断系统的稳定性,并讨论系统增益k 变化对系统稳定性的影响。
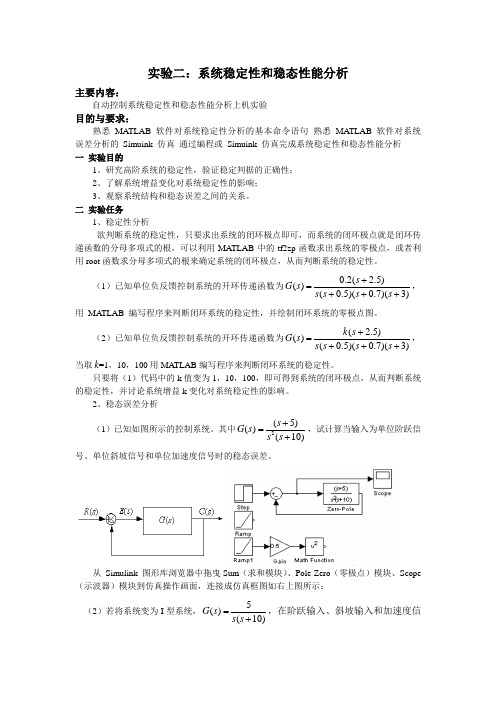
2、稳态误差分析(1)已知如图所示的控制系统。
其中2(5)()(10)s G s s s +=+,试计算当输入为单位阶跃信号、单位斜坡信号和单位加速度信号时的稳态误差。
从 Simulink 图形库浏览器中拖曳Sum (求和模块)、Pole-Zero (零极点)模块、Scope (示波器)模块到仿真操作画面,连接成仿真框图如右上图所示:(2)若将系统变为I 型系统,5()(10)G s s s =+,在阶跃输入、斜坡输入和加速度信号输入作用下,通过仿真来分析系统的稳态误差。
控制系统的稳定性分析与稳定裕度设计控制系统的稳定性是指系统在受到外界干扰或参数变化时,是否能保持输出的稳定性和可控性。
稳定性分析与稳定裕度设计是控制系统设计与优化中非常重要的环节。
本文将介绍控制系统的稳定性分析方法和稳定裕度设计的原则与方法。
一、稳定性分析方法在控制系统中,稳定性分析的目的是确定系统的稳定性边界,也就是确定系统参数的取值范围,使系统保持稳定。
常用的稳定性分析方法有两种:频域方法和时域方法。
1. 频域方法频域方法一般基于系统的传递函数进行分析,常用的工具有Bode图和Nyquist图。
Bode图可以直观地表示系统的幅频特性和相频特性,通过分析Bode图可以确定系统的相角裕度和幅值裕度,从而判断系统的稳定性。
Nyquist图则是通过绘制系统的频率响应曲线来判断系统的稳定性。
2. 时域方法时域方法主要根据系统的差分方程进行分析,常用的工具有阶跃响应和脉冲响应。
通过分析系统的阶跃响应曲线和脉冲响应曲线,可以得出系统的超调量、调节时间和稳态误差等指标,从而判断系统的稳定性。
二、稳定裕度设计原则与方法稳定裕度是指系统在满足稳定性的前提下,能够容忍一定幅度的参数变化或干扰。
稳定裕度设计可以提高系统的鲁棒性和可靠性,常用的稳定裕度设计原则和方法有以下几点:1. 相角裕度设计相角裕度是指系统在开环传递函数的相角曲线与-180度线之间的角度差。
通常情况下,相角裕度越大表示系统的稳定性越好。
为了增加相角裕度,可以通过增大系统的增益或者增加相位补偿器的相位裕度。
2. 幅值裕度设计幅值裕度是指系统在开环传递函数的幅度曲线与0dB线之间的距离。
幅值裕度越大表示系统对参数变化和干扰的鲁棒性越好。
为了增加幅值裕度,可以通过增大系统的增益或者增加幅值补偿器的增益。
3. 稳定裕度的频率特性设计系统的稳定裕度也与频率有关,不同频率下的稳定裕度可能存在差异。
因此,需要根据系统的工作频率范围来设计稳定裕度。
在系统的工作频率范围内,要保证系统的相角裕度和幅值裕度都能满足要求。

控制系统的稳定性分析简介控制系统的稳定性是指系统在受到干扰时,能够保持从初始状态返回到稳定的平衡状态的能力。
稳定性是控制系统设计和分析的重要指标之一,对于确保系统正常运行具有重要意义。
在本文档中,我们将探讨控制系统的稳定性分析方法。
稳定性概念在控制系统中,稳定性可以分为两种类型:绝对稳定和相对稳定。
1.绝对稳定:当系统在受到干扰后能够恢复到初始的平衡状态并保持在该状态时,我们称系统是绝对稳定的。
2.相对稳定:当系统在受到干扰后能够恢复到新的平衡状态并保持在该状态时,我们称系统是相对稳定的。
稳定性分析方法为了评估控制系统的稳定性,我们通常使用以下几种分析方法:1. 传递函数分析传递函数分析是一种常用的稳定性分析方法,它通过将控制系统转化为传递函数的形式,进行频域和时域的分析。
在频域分析中,我们可以使用频率响应函数(Bode图)来评估系统的稳定性。
Bode图由幅度曲线和相位曲线组成,通过分析这两个曲线可以判断系统是否稳定。
在时域分析中,我们可以使用单位斯蒂文斯响应函数来评估系统的稳定性。
单位斯蒂文斯响应函数是指控制系统对于单位阶跃输入的响应。
2. 决策稳定性分析决策稳定性分析方法是一种直观的稳定性评估方法,它通过观察控制系统的反馈回路来判断系统的稳定性。
如果控制系统的反馈回路中存在零点或极点位于右半平面,则系统将是不稳定的。
另外,如果控制系统的相位裕度和增益裕度分别小于零和一,则系统也将是不稳定的。
3. 根轨迹分析根轨迹分析是一种图形化的稳定性分析方法,它通过绘制系统传递函数的根轨迹来评估系统的稳定性。
根轨迹是表示系统极点随控制参数变化的轨迹图,它可以直观地显示系统的稳定性和响应特性。
如果根轨迹上的所有极点都位于左半平面,则系统是稳定的。
4. Nyquist稳定性判据Nyquist稳定性判据是一种基于频域分析的稳定性判据,它利用开放式系统的频率响应来评估系统的稳定性。
Nyquist稳定性判据通过绘制控制系统的开环频率响应曲线,并计算曲线绕原点的圈数来判断系统是否稳定。



控制系统的稳定性分析与设计控制系统的稳定性是控制工程中最为重要的一个参数之一。
一个稳定的控制系统能够使得系统在经过一定的时间后回到原点,而不会发生不可控的偏差,从而保证控制效果的稳定性和可靠性。
本文将从系统稳定性的原理和方法、设计方法及案例等方面探讨控制系统的稳定性分析与设计。
一、系统稳定性的原理和方法1. 系统稳定性的定义系统稳定性指的是系统在外界干扰或参数变化的作用下,回应输出信号与输入信号之间的关系是否稳定。
即在一定时间内,控制系统确保输出值能够跟随输入值的变化,而不会发生不可控的震荡或失控的情况。
2. 系统稳定性的判据良好的系统稳定性需要满足以下条件:(1)经过一定时间后,系统从任何初始状态转移到平衡状态;(2)平衡状态具有稳定性,即系统在发生一定幅度的干扰时,需要在一定时间内回复到原平衡状态;(3)平衡状态的稳定性受到系统参数变化、外界环境变化等多种因素的影响,但是通过合理的调节和控制,使得系统在变化后仍能保持稳定。
3. 系统稳定性的分析方法(1)指标法:它是利用特定的指标量来描述系统的稳定状态,比如阻尼系数、频率响应等。
(2)相关函数法:它是利用系统的特性函数或者频率响应函数来描述系统的稳定性。
(3)传递函数法:传递函数描述输入信号与输出信号之间的关系,可以通过传递函数的特性分析系统的稳定性。
(4)极点分布法:分析系统的极点分布情况,确定系统的极点位置以及极点位置对系统稳定性的影响。
二、控制系统的稳定性设计方法1. PID控制器的设计方法PID控制器是目前使用最为广泛的控制器,它可以通过调节比例系数、积分系数和微分系数来达到控制系统的稳定性。
在进行PID控制器的设计时,需要进行以下步骤:(1)确定控制系统的传递函数;(2)确定控制系统的目标响应曲线;(3)通过目标响应曲线和传递函数设计出PID控制器;(4)进行仿真或实验验证控制系统的稳定性。
2. 模糊控制器的设计方法模糊控制器是一种基于模糊推理的控制器,它可以通过调节模糊逻辑的输入变量和输出变量来达到不同的控制效果。
控制系统稳定性分析引言控制系统是一种通过控制输入信号以达到预期输出的系统。
在实际应用中,控制系统的稳定性是非常重要的,因为它直接关系到系统的可靠性和性能。
本文将介绍控制系统稳定性分析的基本概念、稳定性判据以及常见的稳定性分析方法。
基本概念在控制系统中,稳定性是指系统的输出在输入信号发生变化或扰动时,是否能够以某种方式趋向于稳定的状态,而不产生超调或振荡。
在进行稳定性分析之前,我们需要了解几个重要的概念。
稳定性定义对于一个连续时间的线性时不变系统,如果对于任意有界输入信号,系统的输出始终有界,则称该系统是稳定的。
换句话说,稳定系统的输出不会发散或趋向于无穷大。
极点(Pole)系统的极点是指其传递函数分母化简后得到的方程的根。
极点的位置对系统的稳定性有很大的影响,不同的极点位置可能使得系统的稳定性不同。
范围稳定性(Range Stability)当输入信号有界时,系统的输出也保持有界,即系统是范围稳定的。
渐进稳定性(Asymptotic Stability)当输入信号趋向于有界时,系统的输出也趋向于有界,即系统是渐进稳定的。
稳定性判据稳定性判据是用来判断控制系统是否稳定的方法或准则。
常见的稳定性判据有:Routh-Hurwitz判据、Nyquist判据以及Bode稳定判据。
Routh-Hurwitz判据Routh-Hurwitz稳定性判据是一种基于极点位置的方法。
具体步骤如下:1.根据系统的传递函数确定极点。
2.构造Routh表。
3.根据Routh表的符号判断系统的稳定性。
Nyquist判据Nyquist稳定性判据是一种基于频率响应的方法。
具体步骤如下:1.根据系统的传递函数绘制频率响应曲线。
2.根据频率响应曲线的特征判断系统稳定性。
Bode稳定判据Bode稳定判据是一种基于系统的幅频特性和相频特性的方法。
具体步骤如下:1.根据系统的传递函数绘制Bode图。
2.根据Bode图的特征判断系统稳定性。
稳定性分析方法除了以上的稳定性判据外,还有一些常用的稳定性分析方法可以应用于控制系统的稳定性分析。