选择阶跃扰动作用下系统的稳态误差
- 格式:ppt
- 大小:780.00 KB
- 文档页数:24

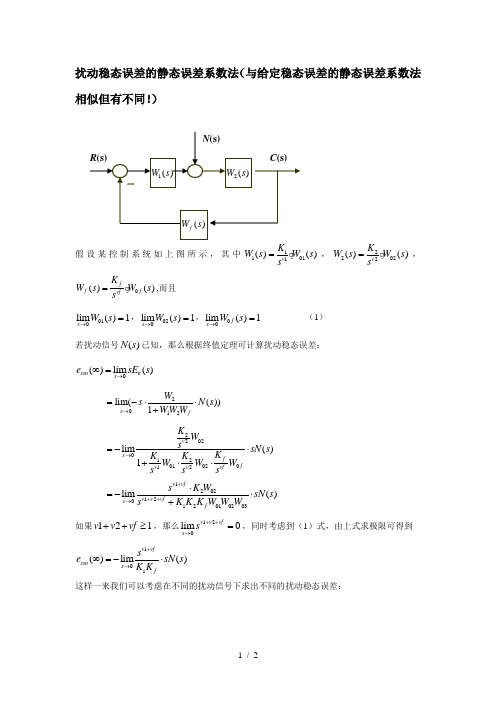
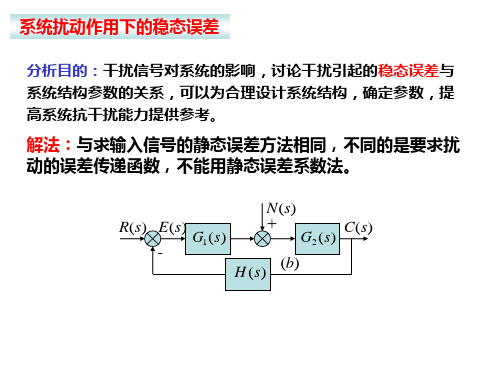
扰动稳态误差的静态误差系数法(与给定稳态误差的静态误差系数法相似但有不同!)假设某控制系统如上图所示,其中11011()()v K W s W s s =g ,22022()()v K W s W s s =g ,0()()ff f vf K W s W s s =g ,而且010lim ()1s W s →=,020lim ()1s W s →=,00lim ()1f s W s →= (1) 若扰动信号()N s 已知,那么根据终值定理可计算扰动稳态误差:()lim ()ssn n s e sE s →∞= 2012lim(())1s fW s N s WW W →=-⋅⋅+ 20220120102012lim ()1v s f f v v vf K W s sN s K K K W W W s s s→=-⋅+⋅⋅ 120212012010203lim ()v vf v v vf s f s K W sN s s K K K W W W +++→⋅=-⋅+ 如果121v v vf ++≥,那么120lim 0v v vfs s ++→=,同时考虑到(1)式,由上式求极限可得到101()lim ()v vfssn s fs e sN s K K +→∞=-⋅ 这样一来我们可以考虑在不同的扰动信号下求出不同的扰动稳态误差:从上面这个表格我们可看出用静态误差系数法求扰动稳态误差时与求给定稳态误差时很相似,但是又有很大不同:用静态误差系数法求扰动稳态误差判定系统的型号和开环放大系数时,只需考虑1()W s 和()f W s ,即只考虑原系统扰动作用点之前的前向通道传函以及反馈通道传函,至于系统扰动作用点之后的前向通道传函2()W s 与扰动稳态误差无关(而求给定稳态误差时所有的环节都要考虑)。
因此要减小扰动稳态误差的话只需改变扰动作用点之前的前向通道传函以及反馈通道传函,改变扰动作用点之后的前向通道传函是无效的。
实验三系统的稳态误差分析一.实验目的:1.了解系统开环增益和系统型别对稳态误差的影响。
2.了解输入信号的形式和幅值对系统稳态误差的影响。
3.分析扰动作用下对系统稳态误差的影响。
4.研究减小或消除稳态误差的措施。
1.分别观测输入信号为阶跃信号、斜坡信号、加速度信号时,不同系统型别稳态误差的变化情况。
2.对有差系统,增大或减小系统的开环增益,观察系统稳态误差的变化3.改变输入信号的幅值,观察系统稳态误差的变化。
4.观测有扰动作用时,系统稳态误差的变化。
5.采取一种措施消除阶跃扰动对系统的影响。
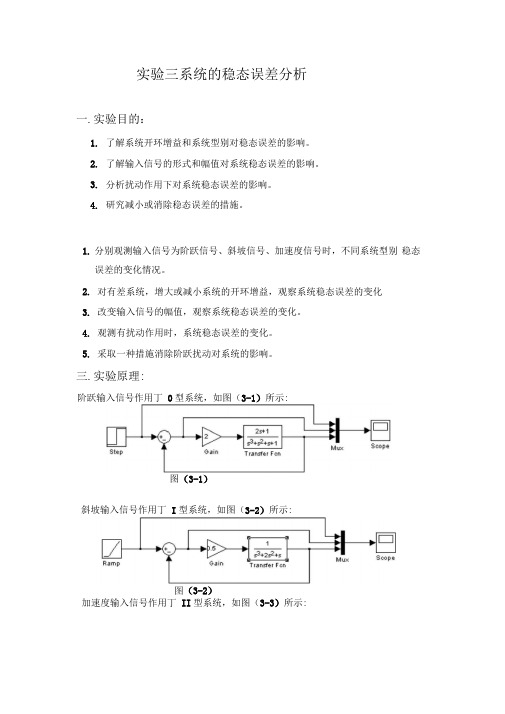
三.实验原理:阶跃输入信号作用丁0型系统,如图(3-1)所示:图(3-1)斜坡输入信号作用丁I型系统,如图(3-2)所示:图(3-2)加速度输入信号作用丁II型系统,如图(3-3)所示:图(3-3)图(3-4)四.实验步骤:利用MATLAB中的Simulink仿真软件。
1.参照实验一的步骤,建立如图(3-1)所示的实验方块图进行仿真;2.单击工具栏中的卜图标,开始仿真,观测在阶跃输入信号作用下,型系统的输出曲线和误差曲线,记录此时的稳态误差值,并与理论计算值相比较;3.有误差时,调整“ Gain”模块的增益,观察稳态误差的变化,分析系统开环增益对稳态性能的影响;4.有误差时,调整输入信号的幅值,观察稳态误差的变化,分析输入信号的大小对稳态误差的影响;5.将对象分别更换为I型和皿型系统,观察在阶跃输入信号作用下,型和皿型系统的输出曲线和误差曲线,记录此时的稳态误差值。
6.更换输入信号的形式为斜坡信号,参考图(3-2)所示的实验方块图,重复步骤2~4,分别观测0型、I型和II型系统的稳态误差。
7.再将输入信号的形式更换为加速度信号,参考图(3-3)所示的实验方块图,重复步骤2~4,分别观测0型、I型和II型系统的稳态误差。
8.在扰动信号作用下,仿真实验方块图如图(3-4)所示,输入阶跃扰动信号,观测系统的输出曲线和误差曲线,记录此时的稳态误差值,并与计算的理论值相比较;9.调整“Gain”模块的增益,观察稳态误差有无变化;,10.再调整“Gainl”模块的增益,观察稳态误差有无变化;11.在扰动作用点之前增加积分环节消除阶跃扰动对系统输出的影响。

第5章习题5.1 已知系统的单位阶跃响应为t te et c 10602.12.01)(−−−+=,试求:(1) 系统的传递函数;(2) 系统的阻尼比ξ和自然振荡频率n ω。
*答案:(1))10)(60(600)(++=s s s s G(2)43.1=ξ 5.24=n ω5.2 设单位反馈系统的开环传递函数为)1(1)(+=s s s G试求系统的上升时间r t 、超调时间p t 、超调量%p σ和调节时间s t 。
*答案:42.2=r t 625.3=p t%3.16=σ ⎩⎨⎧=∆=∆=2856s t5.3 要求图题5.3所示系统具有性能指标:%20%=p σ,s t p 1=。
试确定系统参数K 和A ,并计算r t ,s t 。
图题5.3*答案:5.60=K 135.0=A5.4图题5.4所示控制系统,为使闭环极点为s j1=−±,试确定K 和α的值,并确定这时系统阶跃响应的超调量。
*答案: 2=K1=α 35.0=r t ⎩⎨=∆=5654.0s t5.5 设典型二阶线性定常系统的单位阶跃响应曲线如图题5.5所示 (1)求阻尼比ς和自然振荡频率n ω;(2)画出等效的单位反馈系统; (3)写出相应的开环传递函数。
)10(100)(+=S S s G 图题5.5*答案(1)4.0=ζ 4.11=n ω(3)9.12)s(s 129.96)(+=s G5.6图题5.6所示采样控制系统,已知图中线性网络部分的单位阶跃响应为1−−e t,采样周期为T ,求系统在输入单位阶跃信号时的输出响应y nT ()。
零阶保持器线性网络uy T图题5.6*答案:nTenT y −=1)(5.7 试求下列状态方程的解,设初始状态为)0(x 。
x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−−−=300020001& 答案:)0()(32x e e e t x t tt⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=−−−5.8 求下列状态方程在单位阶跃输入作用下的响应。
第三章例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的0.1倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。