0805A舵机系统实例说课讲解
- 格式:ppt
- 大小:426.00 KB
- 文档页数:7
舵机的原理与单片机控制(二)引言概述:舵机是一种常见的机电设备,广泛应用于机器人、遥控模型等领域。
本文将进一步介绍舵机的原理及其与单片机的控制方法。
正文内容:一、舵机的原理1. 舵机的结构组成:电机、减速器、控制电路和位置反馈装置。
2. 舵机的工作原理:利用电机的转动驱动控制电路,通过调整控制电路的输出脉冲宽度来实现舵机的转动。
3. 舵机的位置反馈装置:通过位置传感器实时检测舵机的转动角度,并将反馈信号传递给控制电路进行修正。
二、单片机控制舵机的基本原理1. 单片机的控制方式:通过控制IO口产生控制信号,即PWM 信号,来控制舵机的转动。
2. PWM信号的特点:通过调整PWM信号的高低电平持续时间来实现对舵机的控制,通常控制信号的占空比与舵机的转动角度成正比。
3. 单片机编程:使用单片机的编程语言,通过设定PWM信号的占空比来控制舵机的转动角度。
4. 控制舵机的程序设计:通过设置PWM信号的周期和占空比,利用适当的算法控制舵机的速度和位置。
三、舵机的常见问题及解决方法1. 舵机抖动问题:可通过增加控制信号的稳定性和校准舵机的中值来解决。
2. 舵机发热问题:可通过降低PWM信号的频率和增加散热系统来解决。
3. 舵机运转不稳定问题:可通过调整PWM信号的占空比和校正舵机的位置反馈装置来解决。
四、舵机控制的优化方法1. 控制算法优化:利用PID控制算法来提高舵机的精确度和稳定性。
2. 舵机模型参数的优化:通过调整舵机的工作电压和扭矩参数,提高其性能和适应性。
3. 舵机控制系统的设计优化:考虑电源、信号线路、控制器等因素,提高舵机控制的整体效果。
五、舵机控制应用案例1. 机器人舵机控制:通过单片机对舵机进行控制,实现机器人的运动和动作。
2. 遥控模型舵机控制:利用遥控器与接收机之间的通信,控制舵机来实现遥控模型的转动和动作。
总结:本文详细介绍了舵机的工作原理和单片机控制方法,以及舵机常见问题的解决方法和控制优化的途径。
舵机控制课程设计一、课程目标知识目标:1. 学生能够理解舵机的工作原理,掌握舵机的种类、特点及其在自动化控制中的应用。
2. 学生能够描述舵机控制的基本电路,了解舵机控制信号的组成及其作用。
3. 学生能够解释舵机控制中角度与脉冲宽度之间的关系,并运用公式进行简单计算。
技能目标:1. 学生能够运用编程语言或控制模块,实现对舵机的精确控制。
2. 学生能够设计简单的舵机控制系统,完成特定任务,如模型车的方向控制。
3. 学生能够通过实际操作,解决舵机控制中遇到的问题,提高实际动手能力和问题解决能力。
情感态度价值观目标:1. 学生能够培养对工程技术的兴趣,增强对自动化控制的认知和探索欲望。
2. 学生能够树立团队合作意识,学会在团队中分工与协作,共同完成项目任务。
3. 学生能够认识到舵机控制技术在现实生活中的应用,理解技术发展对社会进步的重要性。
本课程针对初中或高中年级的学生,结合学科特点,以实用性为导向,注重理论知识与实践操作相结合。
通过本课程的学习,学生不仅能够掌握舵机控制的基础知识,提高编程和动手能力,还能培养对工程技术的热爱和团队协作精神,为未来进一步学习相关领域知识奠定基础。
二、教学内容1. 舵机基础知识:- 舵机的定义、分类和特点- 舵机的工作原理及其在自动化控制中的应用2. 舵机控制原理:- 舵机控制信号组成:脉冲宽度调制(PWM)- 舵机角度与脉冲宽度之间的关系- 舵机控制电路及其工作原理3. 舵机编程与控制:- 编程环境与编程语言的介绍- 舵机控制程序编写:控制舵机转动到指定角度- 舵机控制模块的使用及调试4. 实践操作:- 舵机控制系统设计:实现模型车方向控制- 故障排查与解决:分析并解决实际操作中遇到的问题- 团队合作:分工协作,共同完成项目任务5. 教学案例分析:- 分析舵机控制技术在现实生活中的应用案例- 探讨舵机控制技术的发展趋势及其对社会进步的影响本教学内容依据课程目标,结合教材相关章节,制定详细的教学大纲。

单片机舵机实例一、引言舵机是一种常用的电机控制设备,广泛应用于各种机械系统中。
在单片机中使用舵机可以实现对机械装置的精确控制,例如机器人的手臂、小车的转向等。
本文将以一个单片机舵机的实例为例,介绍如何使用单片机控制舵机的原理和步骤。
二、实验目的本实验的目的是通过单片机控制舵机的转动角度,实现对机械装置的精确控制。
通过实践,了解舵机的原理和使用方法,提高对单片机控制设备的理解和应用能力。
三、实验器材1. 单片机开发板:使用STC89C52单片机开发板;2. 舵机:使用SG90舵机;3. 连接线:用于连接单片机和舵机的电源和控制信号线。
四、实验步骤1. 连接舵机:将舵机的电源线(红色线)连接至单片机的5V电源引脚,将舵机的地线(棕色线)连接至单片机的GND引脚,将舵机的控制信号线(橙色线)连接至单片机的GPIO引脚。
2. 编写程序:使用C语言编写程序,通过单片机的GPIO引脚向舵机发送控制信号。
可以使用PWM信号控制舵机的转动角度,通过改变PWM信号的占空比来控制舵机的位置。
3. 设置舵机初始位置:在程序中设置舵机的初始位置,可以通过改变PWM信号的占空比来调整舵机的初始位置。
4. 控制舵机转动:通过改变PWM信号的占空比,控制舵机的转动角度。
可以通过调整程序中的占空比值来控制舵机的转动方向和角度。
5. 测试舵机控制效果:将程序下载到单片机开发板中,观察舵机的转动情况。
可以通过调整程序中的占空比值,测试舵机在不同角度下的转动效果。
五、实验注意事项1. 连接线的接线要正确,确保舵机和单片机的电源和信号线连接正确。
2. 在控制舵机转动时,要避免过大的转动角度,以免损坏舵机或机械装置。
3. 调试过程中要注意安全,避免触电或其他意外事故的发生。
4. 在编写程序时,要注意控制信号的频率和占空比,确保舵机能够正常工作。
六、实验结果经过实验,成功实现了通过单片机控制舵机的转动角度。
通过改变程序中的占空比值,可以控制舵机在不同角度下的转动效果。
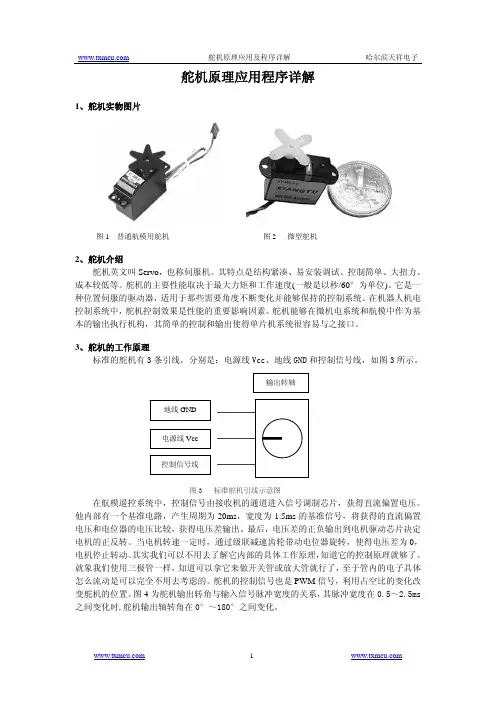
二副专业解读船舶舵机系统舵机是用以操纵船舶、控制或改变船舶航向的重要设备,对船舶航行至关重要。
操舵装置是否处于可用的良好状态,直接关系到船舶的航行安全,以至成为船舶安全检查的一项重要内容。
现就船舶操舵装置、操舵控制系统、应急操舵程序和演习及SOLAS公约第五章第26.1款、第26.2款等容易产生误解的概念作些浅释。
一、操舵装置1.定义能够使舵转动的装置称为操舵装置,通常指安装在舵机室内的舵机和传动机构,分为主操舵装置和辅操舵装置。
主操舵装置是指在正常航行的情况下为驾驶船舶而使舵产生动作所必需的机械、转舵机构、舵机装置动力设备(如设有)及其附属设备向舵杆传递转矩的部件(如舵柄及舵扇);辅橾舵装置是指在主操舵装置失效时为驾驶船舶所需的设备。
2.主操舵装置与辅操舵装置的区别从定义上讲,辅操舵装置应独立于主操舵装置,除了舵柄和舵扇等可共用外,其他部分(包括动力部分)都不可以共用。
就字面意义而言,主、辅操舵装置很容易混淆,导致很多航海者把驾驶台的NFU操舵柄(下文会提到)或驾驶台两边操纵台上、舵机间舵机旁边上的香蕉柄当作辅操舵装置。
其实,这些设备都只是主操舵装置的一种控制器(操舵方式),而非所谓的应急舵或辅操舵装置。
3.主操舵装置替代辅操舵装置的条件根据公约要求:如果主操舵装置具有两台或几台相同的动力设备,对于客船,当任一台动力设备不工作时,主操舵装置必须仍能具有足够的强度并在船舶处于最深航海吃水、以最大营运航速前进时将舵自一舷35°转至另一舷35°,以及相同条件下在不超过28秒内将舵自任一舷35°转至另一舷30°;对于货船,当所有动力设备都工作时,主操舵装置必须能满足上述满舵操作的强度,而且主操舵装置应布置成:当其管系或一台动力设备发生单项故障时能被隔离,使操舵能力持续保证或迅速恢复。
在动力设备上,对于客船,任何一台动力设备都得满足公约要求的性能;对于货船,则只需所有动力设备一起工作时满足公约要求性能即可,但需在满足发生单项故障时能被隔离并迅速恢复的条件下才不必设有辅操舵装置。