第七章 常用机构-运动副
- 格式:ppt
- 大小:3.72 MB
- 文档页数:38

运动副及其分类一、什么是运动副?运动副是指将输入的运动和力矩转换为输出运动和力矩的机械构件,一般由构件、轴承、密封元件、驱动元件等部分组成。
运动副广泛应用于机械设备、自动化生产线、机器人运动系统等领域,是现代工业自动化和智能制造的基础。
二、运动副的分类按结构形式可分为:平面机构、立体连接机构、滑块机构、曲柄摇杆机构、齿轮机构、连杆机构、凸轮机构、链条机构、离合器及制动器、气动液压机构。
1. 平面机构平面机构一般由连杆、链条、凸轮等构件组成,是最基本的运动副之一。
平面机构广泛应用于加工机床、织布机床、高速操作设备等领域。
常见的平面机构有连杆机构、曲柄摇杆机构、滑块机构等,其中连杆机构最常见,一般由活塞齿轮、连杆和转动轴组成。
2. 立体连接机构立体连接机构是由三个或三个以上的构件组成,可以将输入运动和力矩转换为任意的输出运动和力矩。
常见的立体连接机构有球面机构、球面与曲柄连接等,是机器人运动系统和航天器设计中不可或缺的部分。
3. 滑块机构滑块机构一般由滑块、导轨和驱动部分组成,可将输入的运动转化为线性运动,是机床、自动化生产线、锻造机械等领域中非常重要的运动副。
常见的滑块机构有翼板机构、滑块摇杆机构、曲柄滑块机构等。
4. 曲柄摇杆机构曲柄摇杆机构一般由曲柄、连杆和摇杆组成,为机器人运动系统、汽车发动机等领域中广泛应用的运动副之一。
5. 齿轮机构齿轮机构是将输入的运动通过齿轮的啮合和转动进行传动和转换的运动副,广泛应用于机床、印刷设备、起重设备等领域中。
常见的齿轮机构有平齿轮和斜齿轮、齿轮副、行星齿轮副等,其中行星齿轮副常用于航空、航天和机器人的运动控制系统中。
6. 连杆机构连杆机构一般由连杆、转动轴和轴承等构件组成,可将一种转动运动转化为另一种转动运动或线性运动,是机床、铣床、锻造机械等领域中广泛应用的运动副之一。
7. 凸轮机构凸轮机构一般由凸轮、摇杆、轴承等构件组成,可以将输入的运动转化为线性或旋转运动,常用于窄幅生产线、高速运动设备等领域。

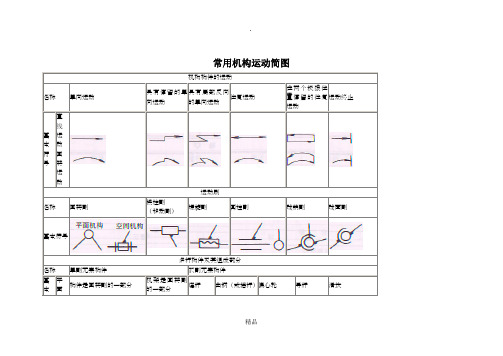
常用机构运动简图机构构件的运动
名称单向运动具有停留的单
向运动
具有局部反向
的单向运动
往复运动
在两个极限位
置停留的往复
运动
运动终止
基本符号直
线
运
动
回
转
运
动
运动刷
名称回转副棱柱副
(移动副)
螺旋副圆柱副球销副球面副
基本符号
多杆构件及其组成部分名称单副元素构件双副元素构件
基本平
面
构件是回转副的一部分
机架是回转副
的一部分
连杆曲柄(或摇杆)偏心轮导杆滑块
精品
精品
多杆构件及其组成部分
基
本
符
号
及
可
用
符
号
空
间
机
构
单副元素构件双副元素构件
构件是回转副的一部分
机架是回转副的
一部分
连杆曲柄(或摇杆)偏心轮导杆滑块
多杆构件及其组成部分
名称三副元素构件机构示例
精品
基本符号
及可用符
号
凸轮机构
名称盘形凸轮移动凸轮空间凸轮
圆柱凸轮圆锥凸轮双曲面凸轮
基本符号
可用符号
凸轮从动杆
名称尖顶从动杆曲面从动杆滚子从动杆平底从动杆基本符号
槽轮机构和棘轮机构
精品
精品
如有侵权请联系告知删除
,感谢你们的配合!
外啮合内啮合
基本符号及可
用符号
名称
棘轮机构外啮合内啮合
基本符号及可
用符号
精品。


机械运动复习教案:熟悉运动副的常用分类和特点一、引言机械运动是现代机械工程的基础,通过机械运动可以完成各种机械设备的操作和工作。
机械运动副则是机械运动的基本构造单元,是指在机械系统中根据一定规律变化的相对两个零件之间的运动。
要想深入了解机械运动,就必须对机械运动副的分类和特点有所了解。
二、机械运动副的分类1. 平面副:也称为平动副,是指两个运动副之间的运动是沿着平面进行的。
例如,推力滑块机构、平面四杆机构等等。
2. 圆柱副:也称为旋转副,是指两个运动副之间的运动是沿着圆周进行的。
例如,平面摆线机构、齿轮传动机构等等。
3. 球面副:也称为全向副,是指两个运动副之间的运动是沿着球面进行的。
例如,万向节机构、球面四杆机构等等。
4. 摆线副:也称为万向副,是指两个运动副之间的运动是沿着摆线进行的。
例如,行星摆线传动机构、正弦摆线传动机构等等。
5. 蜗轮副:也称为螺旋副,是指两个运动副之间的运动是沿着蜗杆和蜗轮进行的。
例如,蜗轮蜗杆传动机构、蜗杆导杆机构等等。
三、机械运动副的特点1. 运动副中的两个零件,一个是动件,一个是定件。
2. 运动副中,动件和定件必须有至少一点相对连接。
3. 运动副构成之前,需要进行设计,以确保运动副的正确性和合理性。
4. 运动副的设计和制造时,需要考虑到机械工程的相关知识,包括机械力学、材料力学、热力学和机械加工技术等等。
5. 运动副的性能和使用寿命,直接决定了整个机械系统的可靠性和效率。
四、结论机械运动副是机械运动的基本构造单元,不同的运动副有不同的特点和用途。
在设计和制造机械设备时,需要根据具体的机械工艺要求和使用情况,选择合适的运动副,以确保机械设备的高效稳定运行。
了解机械运动副的分类和特点,是机械工程专业人员必备的专业知识。

1.运动副:使两个构件直接接触并产生一定相对运动的连接。
2.两个以上的构件一运动副连接而构成的系统称为运动链,为构成首末相连的封闭环的运动链称为开链,否则称为闭链。
3.机构由原动件、从动件和机架三部分组成。
4.机器的特征:(1)人为实体组合。
(2)具有确定的相对运动(3)实现能量的传递和转换构件:运动单元体。
零件:制造单元体。
5.常用机构齿轮连杆、凸轮机构。
6.运动简图包括:(1)构件数目(2)运动副的数目和类型。
(3)构件之间的连接关系(4)与运动变换相关的构件尺寸参数(5)主动件及运动特性。
7.机构的自由度就是机构具有独立运动参数的数目。
8.机构确定运动的条件:机构的自由度数目等于机构的原动件数目。
9.F=2n-2p(低副L)-p(高副H)10.四杆机构的基本形式;a曲柄摇杆机构b双曲柄机构c双摇杆机构11.曲柄存在的条件(1)最长杆与最短杆的长度之和小于或等于其余两杆长度之和。
(2)最短杆或其相邻杆应为机架。
推论;(1)当最长杆与最短杆的长度之和大于其余两杆的长度之和时,只能得到双摇杆机构。
(2)当最长杆与最短杆的长度之和小于或等于其余两杆长度之和时:两极限诶之a最短杆为机架时得到双曲柄机构b最短杆的相邻杆为机架时得到曲柄摇杆机构c最短杆的对面杆为机架时得到双摇杆机构。
12.两极限位置时曲柄所在直线之间所夹的锐角为极为夹角。
13.四杆机构死点:取决于从动件是否与连杆共线。
14.解决死点:a利用飞轮b错位排列15.凸轮机构的分类:(1)按凸轮形状分a盘形凸轮b移动凸轮c圆柱凸轮d曲面凸轮(2)按从动件与凸轮保持接触的方式分a力锁合的凸轮机构b几何锁合的凸轮机构(3)按从动件型式分a尖顶从动件b滚子从动件c平底从动件16.常用的从动件运动规律:a等速运动规律(刚性冲击,低速轻载)b等加速-等减速运动规律(柔性冲击,中速轻载)c余弦加速运动(柔性冲击,中速场合)d正弦加速运动(不产生冲击,高速场合)17.拉应力(紧边拉应力,松边拉应力)离心拉应力。