课程案例029ZW-机器人抛光打磨案例
- 格式:docx
- 大小:65.58 KB
- 文档页数:1

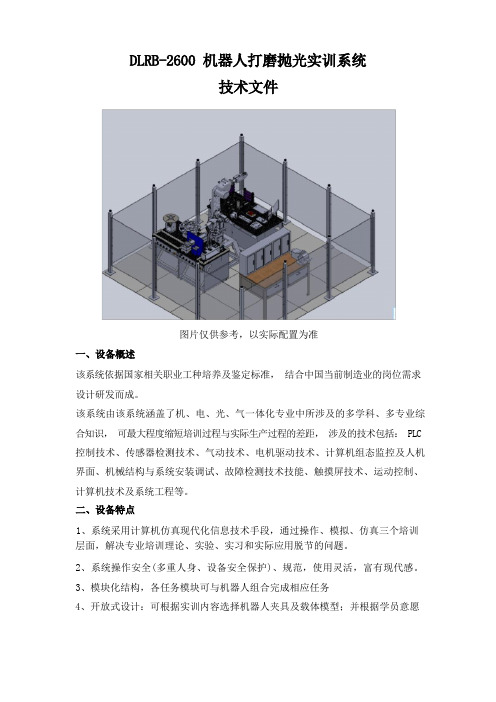
图片仅供参考,以实际配置为准该系统依据国家相关职业工种培养及鉴定标准,结合中国当前制造业的岗位需求设计研发而成。
该系统由该系统涵盖了机、电、光、气一体化专业中所涉及的多学科、多专业综合知识,可最大程度缩短培训过程与实际生产过程的差距,涉及的技术包括: PLC 控制技术、传感器检测技术、气动技术、电机驱动技术、计算机组态监控及人机界面、机械结构与系统安装调试、故障检测技术技能、触摸屏技术、运动控制、计算机技术及系统工程等。
1、系统采用计算机仿真现代化信息技术手段,通过操作、模拟、仿真三个培训层面,解决专业培训理论、实验、实习和实际应用脱节的问题。
2、系统操作安全(多重人身、设备安全保护)、规范,使用灵活,富有现代感。
3、模块化结构,各任务模块可与机器人组合完成相应任务4、开放式设计:可根据实训内容选择机器人夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
1、三相四线380V±10% 50HZ2、工作环境:温度-10℃-+40℃,相对湿度<85%(25℃),无水珠凝结海拔<4000m3、电源控制:自动空气开关通断电源,有过压保护、欠压保护、过流保护、漏电保护系统。
4、输出电源:(1)三相四线 380V±10% 50HZ(2)直流稳压电源: 24V/5A,7、机器人: ABB IRB26001、实训台实训台体采用优质钢板(板厚 1.2mm)制作,表面喷涂处理;实训台面采用型材结构搭建,可任意安装机器人或其它执行机构;并有不锈钢网孔电气安装板 (板厚 1.5mm),用于安装控制器件与电源电路;实训台上配有相应的操作面板,采用内嵌按钮和指示灯,分别为“启动”、“停止”、“复位”,并且具备急停功能;可编程逻辑控制器安装于电气网孔板上,实现机器人与各任务模块的组合;实训台底脚上安装有脚轮,能够方便移动与定位。


机器人抛磨力控制及表面质量检测汇报人:2023-12-29•机器人抛磨力控制概述•机器人抛磨力控制技术•表面质量检测技术目录•机器人抛磨力控制与表面质量检测的关联•案例分析•未来展望与挑战01机器人抛磨力控制概述通过精确控制抛磨力,可以确保工件表面达到理想的粗糙度和平整度,从而提高表面质量。
提高表面质量防止过度磨损提高工作效率过度的抛磨力可能导致工件表面的过度磨损或损伤,而抛磨力控制可以有效避免这种情况。
通过优化抛磨力,可以提高机器人的工作效率,减少不必要的能耗和磨损。
030201抛磨力控制的重要性机器人抛磨力控制的基本原理力反馈控制通过传感器实时监测抛磨力,并将实际力与预设力进行比较,根据比较结果调整机器人的运动参数,实现力的闭环控制。
参数优化通过实验和优化算法,不断调整机器人的运动参数,以实现最佳的抛磨效果。
人工智能技术利用人工智能技术对抛磨过程进行建模和预测,实现对抛磨力的智能控制。
在汽车制造过程中,机器人抛磨力控制可用于对发动机缸体、刹车盘等复杂曲面进行高效抛磨。
汽车制造在航空航天领域,机器人抛磨力控制可用于对飞机零部件、火箭发动机喷嘴等进行精密抛磨。
航空航天在能源领域,机器人抛磨力控制可用于对核电站反应堆内壁、风力发电机叶片等进行高效抛磨。
能源领域机器人抛磨力控制的应用场景02机器人抛磨力控制技术基于力的传感器反馈控制总结词通过在机器人上安装力传感器,实时监测抛磨过程中的接触力,根据反馈的力信号调整机器人的运动参数,确保抛磨力在设定的范围内。
详细描述基于力的传感器反馈控制是一种常见的机器人抛磨力控制方法。
通过在机器人夹持器或工具上安装力传感器,可以实时监测抛磨过程中与工件接触的力。
传感器将力信号反馈给控制系统,系统根据设定的抛磨力和工件表面质量要求,调整机器人的运动速度、方向和姿态,确保抛磨力在合适的范围内,以达到理想的表面质量。
总结词利用机器学习算法对历史抛磨数据进行分析和学习,预测未来的抛磨力,并通过控制系统对机器人进行实时调整,实现预测控制。

机器人自动化打磨抛光技术的应用摘要:随着工业自动化技术的发展,机器人被越来越多地应用到自动化生产线中。
洁具表面的磨削抛光是一道较为复杂的工序,手工操作不仅难以保证产品的加工质量,而且恶劣的工作环境对工人的身体健康有极大的危害。
因此,本文对机器人自动化打磨抛光技术的应用进行了研究。
关键词:机器人系统;打磨抛光;工艺研究1 引言机器人研究水平的高低直接与一个国家的经济、科技水平密切相关,在一定程度上反映了这个国家的综合实力。
目前,打磨抛光主要以人工为主,由于对人体的高危害,打磨抛光行业已面临严重的用工荒。
因此,应开展低成本打磨抛光机器人智能控制系统的研究和开发,提升我国金属抛光打磨行业装备水平,这不仅具有很高的学术价值,同时也具有相当大的现实意义。
2 打磨机器人系统组成及打磨控制流程打磨机器人系统采用由埃夫特机器人公司研发的六轴工业机器人ER50-C10。
打磨系统包括PLC、打磨砂带机、抛光机、和压力传感器、安装在机器人第六轴的夹具组成的一个闭环控制系。
当开始打磨时,安装在机器人第六轴的夹具夹持圆形排气管,放置在转动的打磨砂带机上进行打磨,打磨下压力的大小实时被压力传感器检测,传感器将检测压力值转换为电信号传递给PLC,PLC判断压力大小,输送给机器人控制系统。
从而控制机器人打磨压力的大小。
通过多次试验设定合适的压力值。
如果打磨的压力大于正常压力,则机器人六轴向相反方向移动一定距离,即减小打磨压力。
如果打磨的压力值小于正常压力值,则机器人六轴向正方向移动一定距离,即增大打磨压力。
如果打磨压力值在允许的打磨压力范围之内,则进行正常的打磨程序运行。
以此来保证打磨机器人系统的打磨压力值一直在合理的范围之内。
打磨控制流程图,如图1所示。
图1 打磨控制流程图3 打磨抛光示教编程传统打磨抛光示教编程需要耗费工人的很多时间,一般采用点到点示教编程方法,普通工件打磨示教编程需要几百个点,多的则长达一千多个点。
本文对结构较为典型汽车排气管进行示教编程,并采用两种示教编程方法。






为什么需要打磨机器人很多铸件要人工打毛刺,不仅费时,打磨效果不好,效率低,而且操作者的手还常常受伤。
打毛刺工作现场的空气染污和噪声会损害操作者的身心健康。
各种材质和形状物体的打磨,抛光等工作在德国早已由机器人来完成。
本方案所介绍的打磨机器人就是为一著名德国企业设计生产的。
打磨机器人的工作原理图1是给用户设计的打磨机器人功能性原理图。
整个打磨机器人有双工作台和一台三维直角坐标机器人组成。
其中双工作台的工作原理和加工中心的双工作台原理相似。
当一个工位上的毛坯件被打磨过程中,操作员可以把另一工位上已打磨完的零件取下,然后装上另一毛坯。
每个工作台上的工装可以把零件转动180度,这样能对毛坯的四个面进行打磨。
图1:打磨机器人功能性原理图图2是所用的三维机器人,其中Z轴(上下运动轴)上带有气动砂轮。
通过编程可以使沙轮按要求的轨迹和速度对毛坯进行打磨。
也可以采用示教方式编程,通过手动运动打磨,系统自动记录下运行的轨迹和速度。
以后就用通过示教方式所产生的程序来对同样零件打磨去毛刺。
图2:实际采用的打磨机器人打磨机器人的Z轴采用滚珠丝杠传动的两根PAS43BB直线运动单元,其有效行程为300mm。
Y轴采用滚珠丝杠传动的两根PAS43BB直线运动单元, 其有效行程为800mm。
X轴也采用滚珠丝杠传动的两根PAS43BB直线运动单元, 其有效行程800mm。
这是在中德合资企业沈阳百格机器人有限公司生产的。
驱动电机也采用德国百格拉公司的交流伺服。
减速机是采用德国Neugart公司的PLE系列精密行星减速机。
控制系统采用德国Engelhardt公司F44数控系统。
在打磨和抛光等过程中对机器人的各个轴都有较强的持续性冲击和震动。
为此对单根直线运动单元的滑块,各个轴间的连接板等都采用加强措施,采用抗震和抗冲击措施。
所用的连接螺丝也采用防震措施,避免松动。
五轴五联动打磨机器人对应一些复杂形状零件的打磨和抛光,需要砂轮工作面能在水平面和垂直面转动。


拓斯达打磨机器换人应用案例分析第一篇:拓斯达打磨机器换人应用案例分析拓斯达打磨机器换人应用案例分析当今,工业机器人的使用已经成为评价一个国家自动化程度高低的重要标志之一.打磨是工业机器人在实际的生产的应用之一。
传统打磨很多机件生产出来后带有毛刺,因而需要进一步加工去掉毛刺使得机件的表面光滑。
打磨这项工作时由工作人员拿工件坐在运转的砂轮钱通过与砂轮的接触达到打磨的效果从而去除毛刺,抑或使用其他类别的机器。
在这一过程中往往会伴随着火花和粉尘的出现,它们会对人体造成巨大的伤害,同时也是工作环境变得恶劣,如下图所示常见的打磨方式。
虽然这种打磨方式能提升产品的质量但也存在众多的缺点:1)因火花与粉尘对人体的伤害使得每个工人不可能长期从事这项工作迫使公司需长期招募工人;2)随社会经济的发展工人的工资与材料费用大幅度的增加使得公司的成本也大幅的提升;3)在工作时工人一般是依照经验去判断是否加工完成因而所加工的产品质量无法得到保证;4)因人无法长时间集中去做重复性的事,因此工作效率无法保持稳定。
机器人打磨拓斯达打磨机器人是可进行自动打磨的工业机器人。
打磨机器人主要由机器人本体、计算机和相应控制系统组成,并可做复杂的轨迹运动,且可通过手把手示教或点位示数来实现示教。
在手机注塑件行业中,富士康科技集团作为全球最大的电子产业科技制造服务商,旗下产品包括有iphone、等高端手机都广泛应用拓斯达全自动打磨机器人,用于手机外壳塑胶件抛光打磨,一版三模同时打磨,3D曲线轨迹行走,按需设计。
打磨参数直接在打磨机触摸屏控制台设定,一机多用,打磨无死角。
在铸件行业中,很多铸件要人工打毛刺,不仅费时,打磨效果不好,效率低,而且操作者的手还常常受伤。
打毛刺工作现场的空气染污和噪声会损害操作者的身心健康。
拓斯达全自动打磨抛光机器人灵活自如地将一件件模具抛光,并把抛光好的成品放在规定位置。
拓斯达研发的的“机器人全自动抛光机”操作全过程。
《工业机器人调试》课程案例
机器人打磨抛光系统
1.课程案例基本信息
2.课程案例
很多铸件要人工打毛刺,不仅费时,打磨效果不好,效率低,而且操作者的手还常常受伤。
打毛刺工作现场的空气染污和噪声会损害操作者的身心健康。
各种材质和形状物体的打磨,抛光等工作在德国早已由机器人来完成。
如图:
在打磨和抛光等过程中对机器人的各个轴都有较强的持续性冲击和震动。
为此对单根直线运动单元的滑块,各个轴间的连接板等都采用加强措施,采用抗震和抗冲击措施。
所用的连接螺丝也采用防震措施,避免松动。