DLRB-2600机器人打磨抛光实训系统
- 格式:docx
- 大小:493.27 KB
- 文档页数:16
一、前言随着科技的飞速发展,机器人技术在我国逐渐成熟,并在工业、医疗、农业等多个领域得到了广泛应用。
为了更好地了解和掌握机器人技术,提高自身的实践能力,我们组织了一次机器人实训活动。
本文将详细记录实训过程中的操作步骤和注意事项。
二、实训设备与环境1. 设备:本次实训采用ABB工业机器人,型号IRB 460,它是一款六轴工业机器人,具有高精度、高速度、高稳定性等特点。
2. 环境:实训场地为我校机器人实验室,实验室配备了机器人控制系统、示教器、电源等设备,为实训提供了良好的环境。
三、实训内容1. 熟悉机器人系统(1)了解机器人系统的组成:包括机械臂、控制器、示教器、传感器等。
(2)掌握机器人系统的操作方法:如启动、停止、紧急停止、移动、编程等。
2. 机器人编程(1)学习机器人编程语言:如RAPID语言,了解其语法和功能。
(2)编写机器人程序:根据实际需求,编写机器人运动轨迹、抓取、放置等程序。
3. 机器人调试(1)检查机器人系统是否正常,如机械臂、控制器、传感器等。
(2)调整机器人运动参数,如速度、加速度、关节角度等。
(3)测试机器人程序,确保机器人能够按照预期运行。
4. 机器人应用(1)了解工业机器人应用场景,如焊接、搬运、装配等。
(2)学习机器人与外部设备(如焊接设备、搬运设备等)的连接方法。
(3)设计并实现一个简单的机器人应用案例。
四、操作过程1. 熟悉机器人系统(1)首先,我们仔细观察ABB工业机器人的外观和结构,了解其组成和功能。
(2)接着,在指导老师的带领下,我们学习了机器人控制系统的操作方法,包括启动、停止、紧急停止、移动、编程等。
2. 机器人编程(1)在掌握了RAPID语言的基础上,我们开始编写机器人程序。
(2)首先,我们设计了一个简单的运动轨迹,使机器人从初始位置移动到指定位置。
(3)然后,我们编写了机器人抓取和放置程序的代码,实现机器人对物体的抓取和放置。
3. 机器人调试(1)在调试过程中,我们首先检查了机器人系统的各个部分是否正常,如机械臂、控制器、传感器等。
图片仅供参考,以实际配置为准该系统依据国家相关职业工种培养及鉴定标准,结合中国当前制造业的岗位需求设计研发而成。
该系统由该系统涵盖了机、电、光、气一体化专业中所涉及的多学科、多专业综合知识,可最大程度缩短培训过程与实际生产过程的差距,涉及的技术包括: PLC 控制技术、传感器检测技术、气动技术、电机驱动技术、计算机组态监控及人机界面、机械结构与系统安装调试、故障检测技术技能、触摸屏技术、运动控制、计算机技术及系统工程等。
1、系统采用计算机仿真现代化信息技术手段,通过操作、模拟、仿真三个培训层面,解决专业培训理论、实验、实习和实际应用脱节的问题。
2、系统操作安全(多重人身、设备安全保护)、规范,使用灵活,富有现代感。
3、模块化结构,各任务模块可与机器人组合完成相应任务4、开放式设计:可根据实训内容选择机器人夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
1、三相四线380V±10% 50HZ2、工作环境:温度-10℃-+40℃,相对湿度<85%(25℃),无水珠凝结海拔<4000m3、电源控制:自动空气开关通断电源,有过压保护、欠压保护、过流保护、漏电保护系统。
4、输出电源:(1)三相四线 380V±10% 50HZ(2)直流稳压电源: 24V/5A,7、机器人: ABB IRB26001、实训台实训台体采用优质钢板(板厚 1.2mm)制作,表面喷涂处理;实训台面采用型材结构搭建,可任意安装机器人或其它执行机构;并有不锈钢网孔电气安装板 (板厚 1.5mm),用于安装控制器件与电源电路;实训台上配有相应的操作面板,采用内嵌按钮和指示灯,分别为“启动”、“停止”、“复位”,并且具备急停功能;可编程逻辑控制器安装于电气网孔板上,实现机器人与各任务模块的组合;实训台底脚上安装有脚轮,能够方便移动与定位。
一、引言随着科技的不断发展,自动化、智能化已经成为制造业的重要发展方向。
工业机器人作为自动化、智能化的重要载体,其在各行各业的应用日益广泛。
本次实训报告主要针对打磨机器人进行实践操作,通过对打磨机器人的操作、维护、调试等方面进行深入学习,以期对工业机器人在实际生产中的应用有更深入的了解。
二、实训目的与意义1.实训目的本次实训旨在通过实际操作,使学员掌握打磨机器人的操作、维护、调试等技能,提高学员的动手能力,培养学员在实际生产中解决实际问题的能力。
2.实训意义(1)提高学员的实践操作能力,为今后从事相关行业奠定基础。
(2)了解工业机器人在实际生产中的应用,为我国制造业的发展贡献力量。
(3)提高学员的创新意识,激发学员对自动化、智能化技术的热情。
三、实训内容与过程1.实训内容(1)打磨机器人基础知识学习(2)打磨机器人操作与维护(3)打磨机器人调试与故障排除(4)打磨机器人应用案例研究2.实训过程(1)打磨机器人基础知识学习首先,对打磨机器人的概念、原理、结构等进行系统学习,了解打磨机器人的工作原理和操作方法。
(2)打磨机器人操作与维护在掌握打磨机器人基础知识的基础上,进行实际操作训练。
在操作过程中,学会如何正确操作打磨机器人,确保生产安全;同时,了解打磨机器人的日常维护保养方法,确保机器人的正常运行。
(3)打磨机器人调试与故障排除通过学习打磨机器人的调试方法,掌握如何调整机器人参数,以满足不同生产需求;同时,学会分析打磨机器人故障原因,进行故障排除。
(4)打磨机器人应用案例研究通过研究国内外打磨机器人应用案例,了解打磨机器人在实际生产中的应用情况,为今后从事相关行业提供借鉴。
四、实训成果与体会1.实训成果(1)掌握了打磨机器人的操作、维护、调试等技能。
(2)了解了工业机器人在实际生产中的应用情况。
(3)提高了自己的动手能力、创新意识和团队协作能力。
2.实训体会(1)理论与实践相结合,才能更好地掌握知识。
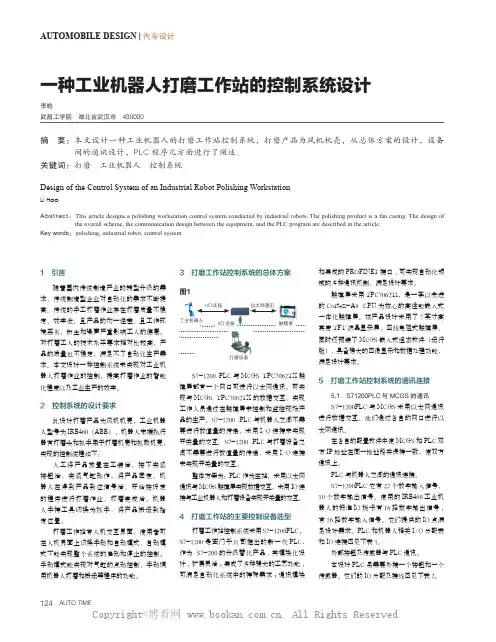
AUTOMOBILE DESIGN | 汽车设计一种工业机器人打磨工作站的控制系统设计李皓武昌工学院 湖北省武汉市 430000摘 要: 本文设计一种工业机器人的打磨工作站控制系统,打磨产品为风机机壳,从总体方案的设计,设备间的通讯设计,PLC程序几方面进行了阐述。
关键词:打磨 工业机器人 控制系统1 引言随着国内传统制造产业的转型升级的需求,传统制造型企业对自动化的需求不断提高。
传统的手工打磨作业存在打磨质量不稳定、效率低、且产品的均一性差。
且工作环境恶劣,粉尘和噪声严重影响工人的健康。
对打磨工人的技术水平要求相对比较高,产品的质量也不稳定,满足不了自动化生产需求。
本文设计一种控制系统来实现对工业机器人打磨作业的控制,提高打磨作业的智能化程度以及工业生产的效率。
2 控制系统的设计要求此设计打磨产品为风机机壳,工业机器人型号为IRB460(ABB),机器人末端执行器有打磨头和抓手用于打磨机壳和抓取机壳,实现的控制流程如下:人工将产品放置在工装后,按下夹紧按钮后,夹紧气缸动作,将产品固定,机器人在得到产品到位信号后,开始按设定的程序进行打磨作业,打磨完成后,机器人手持工具切换为抓手,将产品搬运到指定位置。
打磨工作站有人机交互界面,使用者可在人机界面上切换手动和自动模式,自动模式下能实现整个系统的启动和停止的控制。
手动模式能实现对气缸的点动控制,手动调用机器人打磨和搬运等程序的功能。
3 打磨工作站控制系统的总体方案图1I/O连接I/O连接以太网通讯触摸屏打磨设备工业机器人S7-1200 PLC与MCGS TPC7062TX触摸屏都有一个网口可进行以太网通讯,可实现与MCGS TPC7062TX的数据交互,实现工作人员通过在触摸屏来控制和监控现场产品的生产。
S7-1200 PLC与机器人之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。
S7-1200 PLC与打磨设备之间不需要进行数值量的传递,采用I/O连接来实现开关量的交互。
全自动打磨抛光工业机器人系统研发摘要:为实现工件的全自动打磨抛光,需通过Pro/E 建模设计工业机器人本体、上下料系统、打磨平台及机构,从而研发并控制自动打磨抛光工业机器人系统,通过以太网通讯关联 PLC 与控制柜。
关键词:打磨抛光机器人;数学建模;模糊变结构控制;Pro/E建模一、全自动打磨抛光工业机器人总体方案目前,研发全自动打磨抛光工业机器人有利也存在弊端,优势是可以充分展现机器人优于人工的生产稳定性、联系性以及优化性能,通过设定最优抛光动作,在一定程度上可以提升抛光质量及效率;而弊端是工业环境制约研发过程发展。
一方面,原有生产环境影响现有机械结构,因此所设计的机械结构需结合现有生产环境及尺寸;另一方面,设计机器人系统需满足金属抛光打磨所需的高灵活性以及高精准性设计要求[1]。
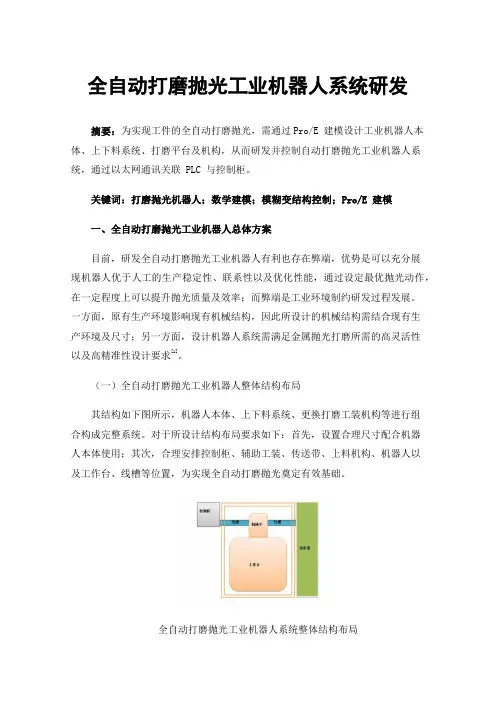
(一)全自动打磨抛光工业机器人整体结构布局其结构如下图所示,机器人本体、上下料系统、更换打磨工装机构等进行组合构成完整系统。
对于所设计结构布局要求如下:首先,设置合理尺寸配合机器人本体使用;其次,合理安排控制柜、辅助工装、传送带、上料机构、机器人以及工作台、线槽等位置,为实现全自动打磨抛光奠定有效基础。
全自动打磨抛光工业机器人系统整体结构布局Pro/E 建模打磨抛光工艺流程为:首先,带有真空吸盘的机器人打磨系统模块通过真空抓取待打磨抛光工件,并放置于打磨台中,大打磨头自动安装打磨砂布负责抛光打磨工件表面,小打磨头负责抛光打磨工件侧面,打磨好的工件会通过真空吸盘放置于传送带,完成工件抛光打磨过程。
打磨抛光机器人系统 Pro/E 建模二、全自动打磨抛光工业机器人及辅助系统设计(一)机器人主体研究全自动打磨抛光工业机器人,主要研究内容包含机器人控制算法、尺寸、机器人运动速度以及旋转半径等重要参数。
本文选用的全自动打磨抛光工艺机器人系统为 FUNAC M-10iA 型机器人,需要注意的是机器人的选择需根据工种类型,择优而选。
一、前言随着科技的不断发展,自动化技术在各个领域的应用越来越广泛。
工业机器人作为一种高度集成的自动化设备,已经成为现代工业生产的重要工具。
在铸造、机械加工、汽车制造等领域,机器人可以替代人工完成繁琐、重复的工作,提高生产效率和产品质量。
打磨机器人作为工业机器人的一种,具有广泛的应用前景。
本实训报告将介绍打磨机器人的相关知识,以及实训过程中的操作方法和心得体会。
二、实训目的1. 了解打磨机器人的基本原理和组成结构;2. 掌握打磨机器人的操作方法和注意事项;3. 学会调试和维护打磨机器人;4. 提高动手能力和团队合作意识。
三、实训内容1. 理论学习(1)打磨机器人的定义:打磨机器人是一种能够自动完成打磨作业的工业机器人,主要用于去除工件表面的毛刺、锐边、氧化皮等。
(2)打磨机器人的分类:根据工作方式,可分为机械式打磨、磨料磨削式打磨、电火花打磨等;根据应用领域,可分为铸造、机械加工、汽车制造等。
(3)打磨机器人的组成结构:主要由执行机构、驱动装置、控制系统、检测装置等组成。
2. 实训操作(1)打磨机器人的安装和调试:首先,根据工件尺寸和加工要求,选择合适的打磨机器人。
然后,按照说明书进行安装,调整机器人各个部件的位置和参数。
最后,进行调试,确保机器人能够正常运行。
(2)打磨机器人的操作:操作人员应熟悉打磨机器人的操作规程,按照工艺要求进行操作。
在操作过程中,注意观察机器人的运行状态,确保加工质量。
(3)打磨机器人的维护和保养:定期检查打磨机器人的各个部件,及时更换磨损的零件。
保持机器人的清洁,防止灰尘、油污等杂物进入。
3. 团队合作在实训过程中,同学们分为小组,共同完成实训任务。
小组成员之间互相协作,共同解决问题,提高了团队协作能力。
四、实训心得1. 通过本次实训,我对打磨机器人的基本原理和组成结构有了更深入的了解,掌握了打磨机器人的操作方法和注意事项。
2. 在实训过程中,我学会了如何调试和维护打磨机器人,提高了自己的动手能力。
1
DLRB-2600机器人打磨抛光实训系统
技术文件
图片仅供参考,以实际配置为准
一、设备概述
该系统依据国家相关职业工种培养及鉴定标准,结合中国当前制造业的岗位需求设计研发而成。
该系统由该系统涵盖了机、电、光、气一体化专业中所涉及的多学科、多专业综合知识,可最大程度缩短培训过程与实际生产过程的差距,涉及的技术包括:PLC
控制技术、传感器检测技术、气动技术、电机驱动技术、计算机组态监控及
人机界面、机械结构与系统安装调试、故障检测技术技能、触摸屏技术、运动控制、计算机技术及系统工程等。
二、设备特点
1、系统采用计算机仿真现代化信息技术手段,通过操作、模拟、仿真三个培训层面,解决专业培训理论、实验、实习和实际应用脱节的问题。
2、系统操作安全(多重人身、设备安全保护)、规范,使用灵活,富有现代感。
3、模块化结构,各任务模块可与机器人组合完成相应任务
4、开放式设计:可根据实训内容选择机器人夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
三、技术参数
1、三相四线380V±10% 50HZ
2、工作环境:温度-10℃-+40℃,相对湿度<85%(25℃),无水珠凝结海拔<4000m
3、电源控制:自动空气开关通断电源,有过压保护、欠压保护、过流保护、漏电保护系统。
4、输出电源:
2
(1)三相四线380V±10% 50HZ
(2)直流稳压电源:24V/5A,
7、机器人:ABB IRB2600
四、各模块简介
1、实训台
实训台体采用优质钢板(板厚1.2mm)制作,表面喷涂处理;实训台面采用型材结构搭建,可任意安装机器人或其它执行机构;并有不锈钢网孔电气安装板(板厚1.5mm),用于安装控制器件与电源电路;实训台上配有相应的操作面板,采用内嵌按钮和指示灯,分别为“启动”、“停止”、“复位”,并且具备急停功能;可编程逻辑控制器安装于电气网孔板上,实现机器人与各任务模块的组合;实训台底脚上安装有脚轮,能够方便移动与定位。
2、机器人
1)机器人本体
3
4
采用ABB IRB2600型工业机器人
2) 机器人本体
手腕持重: 12 kg
最大臂展半径: 1.85m
轴数: 6轴
重复定位精度: ±
0.07mm
防护等级:IP67
轴运动:
轴动作范围最大速度
1 回转+180︒至-180︒175︒/s
2 立臂+155︒至-95︒175︒/s
3 横臂+75︒至-180︒175︒/s
4 腕+400︒至-400︒360︒/s
5 腕摆+120︒至-120︒360︒/s
腕传+400︒至-400︒500︒/s
电源:200-600V,50/60Hz
耗电量: 4 KVA / 7.8 KVA(带外轴)
机器人尺寸:底座:676 X 511 mm
机器人重量:284 kg
环境温度:5︒C- 45︒C
5。