机械优化设计实例(人字架优化)
- 格式:doc
- 大小:162.00 KB
- 文档页数:5
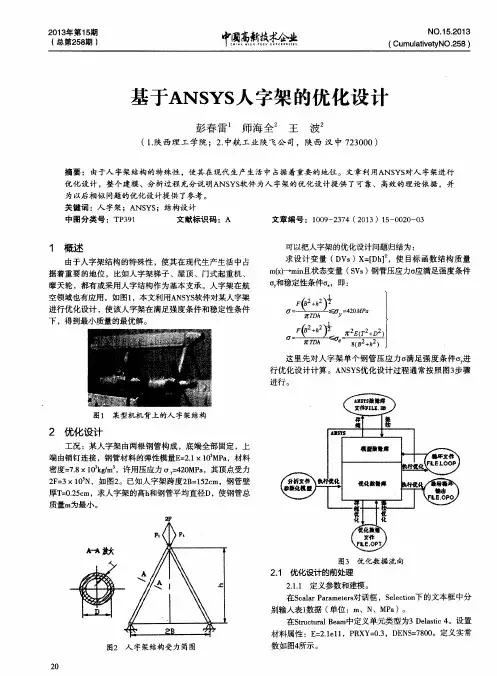
机械优化设计实例(人字架优化)第1页共5页人字架的优化设计一、问题描述如图1所示的人字架由两个钢管组成,其顶点受外力2F=3×105N 。
已知人字架跨度2B=152 cm,钢管壁厚T=0.25cm,钢管材料的弹性模量E=2.1510? MPa ,材料密度p=7.8×103 kg /m ,许用压应力δy =420 MPa 。
求钢管压应力δ不超过许用压应力δy 和失稳临界应力δc 的条件下,人字架的高h 和钢管平均直径D 使钢管总质量m 为最小。
二、分析设计变量:平均直径D 、高度h三、数学建模所设计的空心传动轴应满足以下条件:(1)强度约束条件即δ≤??????y δ 经整理得()[]y hTDhB F δπ≤+2122(2)稳定性约束条件:[]c δδ≤()()()***-*****28h B D T E hTDhB F ++≤+ππ (3)取值范围:第2页共5页*****≤≤D ***-*****≤≤h则目标函数为:()2*****__.122min x x xf +?=-约束条件为:***-*****00106)(212241≤-+?=x Tx x X g π()***-*****5.*****.***-********-*****)(2 221212242≤++-+?=X x x x Tx x g π010)(13≤-=x X g0120)(14≤-=x X g 0200)(25≤-=x X g01000)(26≤-=x X g四、优化方法、编程及结果分析1优化方法综合上述分析可得优化数学模型为:()Tx x X 21,=;)(min x f ;()0..≤x g t s i 。
考察该模型,它是一个具有2个设计变量,6个约束条件的有约束非线性的单目标最优化问题,属于小型优化设计,故采用SUMT 惩罚函数内点法求解。
2方法原理内点惩罚函数法简称内点法,这种方法将新目标函数定义于可行域内,序列迭代点在可行域内逐步逼近约束边界上的最优点。
機械優化設計案例11. 題目對一對單級圓柱齒輪減速器,以體積最小為目標進行優化設計。
2.已知條件已知數輸入功p=58kw ,輸入轉速n 1=1000r/min ,齒數比u=5,齒輪的許用應力[δ]H =550Mpa ,許用彎曲應力[δ]F =400Mpa 。
3.建立優化模型3.1問題分析及設計變數的確定由已知條件得求在滿足零件剛度和強度條件下,使減速器體積最小的各項設計參數。
由於齒輪和軸的尺寸(即殼體內的零件)是決定減速器體積的依據,故可按它們的體積之和最小的原則建立目標函數。
單機圓柱齒輪減速器的齒輪和軸的體積可近似的表示為:]3228)6.110(05.005.2)10(8.0[25.087)(25.0))((25.0)(25.0)(25.0222122212221222212212122221222120222222222121z z z z z z z z z z z g g z z d d l d d m u m z b bd m u m z b b d b u z m b d b z m d d d d l c d d D c b d d b d d b v +++---+---+-=++++-----+-=πππππππ 式中符號意義由結構圖給出,其計算公式為b c d m u m z d d d mu m z D m z d m z d z z g g 2.0)6.110(25.0,6.110,21022122211=--==-===由上式知,齒數比給定之後,體積取決於b 、z 1 、m 、l 、d z1 和d z2 六個參數,則設計變數可取為T z z T d d l m z b x x x x x x x ][][211654321== 3.2目標函數為min )32286.18.092.0858575.4(785398.0)(2625262425246316321251261231232123221→++++-+-+-+=x x x x x x x x x x x x x x x x x x x x x x x x x x f3.3約束條件的建立1)為避免發生根切,應有min z z ≥17=,得017)(21≤-=x x g2 )齒寬應滿足max min ϕϕ≤≤d b ,min ϕ和max ϕ為齒寬係數d ϕ的最大值和最小值,一般取min ϕ=0.9,max ϕ=1.4,得 04.1)()(0)(9.0)(32133212≤-=≤-=x x x x g x x x x g3)動力傳遞的齒輪模數應大於2mm ,得02)(34≤-=x x g4)為了限制大齒輪的直徑不至過大,小齒輪的直徑不能大於max 1d ,得0300)(325≤-=x x x g 5)齒輪軸直徑的範圍:max min z z z d d d ≤≤得0200)(0130)(0150)(0100)(69685756≤-=≤-=≤-=≤-=x x g x x g x x g x x g 6)軸的支撐距離l 按結構關係,應滿足條件:l 2min 5.02z d b +∆+≥(可取min ∆=20),得0405.0)(46110≤--+=x x x x g7)齒輪的接觸應力和彎曲應力應不大於許用值,得400)10394.010177.02824.0(7098)(0400)10854.0106666.0169.0(7098)(0550)(1468250)(224222321132242223211213211≤-⨯-⨯+=≤-⨯-⨯+=≤-=---x x x x x x g x x x x x x g x x x x g8)齒輪軸的最大撓度max δ不大於許用值][δ,得0003.0)04.117)(445324414≤-=x x x x x x g 9)齒輪軸的彎曲應力w δ不大於許用值w ][δ,得05.5106)1085.2(1)(05.5104.2)1085.2(1)(1223246361612232463515≤-⨯+⨯=≤-⨯+⨯=x x x x x g x x x x x g4.優化方法的選擇由於該問題有6個設計變數,16個約束條件的優化設計問題,採用傳統的優化設計方法比較繁瑣,比較複雜,所以選用Matlab 優化工具箱中的fmincon 函數來求解此非線性優化問題,避免了較為繁重的計算過程。



机械优化设计经典实例机械优化设计是指通过对机械结构和工艺的改进,提高机械产品的性能和技术指标的一种设计方法。
机械优化设计可以在保持原产品功能和形式不变的前提下,提高产品的可靠性、工作效率、耐久性和经济性。
本文将介绍几个经典的机械优化设计实例。
第一个实例是汽车发动机的优化设计。
汽车发动机是汽车的核心部件,其性能的提升对汽车整体性能有着重要影响。
一种常见的汽车发动机优化设计方法是通过提高燃烧效率来提高功率和燃油经济性。
例如,通过优化进气和排气系统设计,改善燃烧室结构,提高燃烧效率和燃油的利用率。
此外,采用新材料和制造工艺,减轻发动机重量,提高动力性能和燃油经济性也是重要的优化方向。
第二个实例是飞机机翼的优化设计。
飞机机翼是飞机气动设计中的关键部件,直接影响飞机的飞行性能、起降性能和燃油经济性。
机翼的优化设计中,常采用的方法是通过减小机翼的阻力和提高升力来提高飞机性能。
例如,优化机翼的气动外形,减小阻力和气动失速的风险;采用新材料和结构设计,降低机翼重量,提高飞机的载重能力和燃油经济性;优化翼尖设计,减小湍流损失,提高升力系数。
第三个实例是电机的优化设计。
电机是广泛应用于各种机械设备和电子产品中的核心动力装置。
电机的性能优化设计可以通过提高效率、减小体积、降低噪音等方面来实现。
例如,采用优化电磁设计和轴承设计,减小电机的损耗和噪音,提高效率;通过采用新材料和工艺,减小电机的尺寸和重量,实现体积紧凑和轻量化设计。
总之,机械优化设计在提高机械产品性能和技术指标方面有着重要应用。
通过针对不同机械产品的特点和需求,优化设计可以提高机械产品的可靠性、工作效率、耐久性和经济性。
这些经典实例为我们提供了有效的设计思路和方法,帮助我们在实际设计中充分发挥机械优化设计的优势和潜力。
% 人字架结构尺寸优化设计% 1-主程序% 人字架优化调用两级减速器目标函数文件与非线性约束文件% 设计变量(钢管平均直径D和人字架高度H)的初始值x0=[100;800];% 设计变量(钢管平均直径D和人字架高度H)的下界与上界Lb=[20;200];Ub=[140;1200];% 调用多维约束优化函数% 线性不等式约束放入约束函数文件,参数A,b定义为空矩阵% 没有线性等式约束,参数Aeq,beq定义为空矩阵options=optimset('largescale','off','display','iter');% 'largescale','off'关闭了大规模方式;% 'display'用来控制计算过程的显示;% 'iter'表示显示优化过程的每次计算结果。
[x,fn,exitflag,output]=fmincon(@rzjyh_f,x0,[],[],[],[],Lb,Ub,@rzjyh_g,options);% 返回值exitflag:>0表示计算收敛,=0表示超过了最大的迭代次数,<0表示计算不收敛;% 返回值output有3个分量,其中:% iterations是优化过程中迭代次数,funcCount是代入函数值的次数,algorithm是优化所采用的算法disp ' ******** 人字架结构尺寸优化设计最优解********'fprintf(' 钢管平均直径 D = %3.4f mm \n',x(1))fprintf(' 人字架高度H = %3.4f mm \n',x(2))fprintf(' 人字架体积V = %3.4f mm^3 \n',fn)% 调用多维约束优化非线性约束函数(jsqyh_g)计算最优点x*的性能约束函数值g=rzjyh_g(x);disp ' ======== 最优点的性能约束函数值========'fprintf(' 人字架钢管压缩强度g1 = %3.4f MPa \n',g(1))fprintf(' 人字架钢管稳定性g2 = %3.4f MPa \n',g(2))% 2-目标函数(rzjyh_f)function f=rzjyh_f(x);% 人字架跨距B;钢管厚度T;B=1520;T=2.5;f=2*pi*x(1)*T*sqrt((B/2)^2+x(2)^2);% 3-约束函数(rzjyh_g)function [g,ceq]=rzjyh_g(x);% 人字架跨距B;钢管厚度T;载荷P;弹性模量E;许用压应力Cy;B=1520;T=2.5;P=294300;E=2.119e5;sigma_y=690;% 钢管压缩强度条件Q=0.5*P*sqrt((B/2)^2+x(2)^2)/x(2); % 钢管轴向压力sigma=Q/(pi*T*x(1)); % 钢管压应力g(1)=sigma-sigma_y;% 钢管稳定性条件sigma_c=0.125*pi^2*E*(x(1)^2+T^2)/((B/2)^2+x(2)^2); % 稳定临界应力g(2)=sigma-sigma_c;% 钢管平均直径边界条件g(3)=200-x(2);g(4)=x(1)-140;% 人字架高度边界条件g(5)=20-x(1);g(6)=x(2)-1200;% 没有非线性等式约束ceq=[];% 4-人字架结构尺寸优化设计的几何描述% 按等间隔矢量产生二维网格矩阵xx1=linspace(20,140,20); % D取值范围20- 140 xx2=linspace(200,1200,200); % H取值范围200-1200 [x1,x2]=meshgrid(xx1,xx2);% 数学模型% 人字架跨距B;钢管厚度T;载荷P;弹性模量E;许用压应力sigma_y;B=1520;T=2.5;P=294300;E=2.119e5;sigma_y=690;f=2*pi.*x1*T.*sqrt((B/2)^2+x2.^2); % 目标函数f% 目标函数值几何描述fh=contour(x1,x2,f); % 目标函数等高线clabel(fh); % 标注目标函数值title('\rm 人字架结构尺寸优化的设计平面');xlabel('钢管平均直径\rm D / mm ');ylabel('人字架高度\rm H / mm ');% 钢管压缩强度条件Q=0.5*P*sqrt((B/2)^2+x2.^2)./x2; % 钢管轴向力sigma=Q./(pi.*x1*T); % 钢管压应力g1=sigma-sigma_y; % 约束函数g1% 钢管稳定性条件sigma_c=0.125*pi^2*E.*(x1.^2+T^2)./((B/2)^2+x2.^2); % 稳定临界应力g2=sigma-sigma_c; % 约束函数g2% 约束函数几何描述hold on;g1h=contour(x1,x2,g1);g2h=contour(x1,x2,g2);% 标注图形gtext('X*');gtext('g_1(X)=0');gtext('g_2(X)=0');计算结果:max Directional First-orderIter F-count f(x) constraint Step-size derivative optimality Procedure0 3 1.73329e+006 -401 7 880958 -41.65 0.5 -1.42e+006 4.65e+0052 11 778317 -34.75 0.5 -2.04e+005 5.46e+0043 15 733855 -27.57 0.5 -8.95e+004 2.8e+0044 19 712302 -13.03 0.5 -4.34e+004 1.35e+0045 23 701688 -6.281 0.5 -2.13e+004 7.36e+0036 27 696432 -3.074 0.5 -1.05e+004 3.72e+0037 31 693820 -1.519 0.5 -5.23e+003 1.87e+0038 35 692519 -0.7551 0.5 -2.61e+003 9359 38 691219 0.004675 1 -1.3e+003 2.2510 41 691220 9.639e-008 1 1.27 0.18111 44 691220 1.137e-013 1 5.35e-005 5.88e-005 Hessian modifiedOptimization terminated: first-order optimality measure less than options.TolFunand maximum constraint violation is less than options.TolCon.Active inequalities (to within options.TolCon = 1e-006):lower upper ineqlin ineqnonlin12******** 人字架结构尺寸优化设计最优解********钢管平均直径 D = 47.5144 mm人字架高度H = 529.2580 mm人字架体积V = 691219.9363 mm^3======== 最优点的性能约束函数值========人字架钢管压缩强度g1 = 0.0000 MPa人字架钢管稳定性g2 = 0.0000 MPa。
机械最优化设计及其应用徐华伟(三峡大学机械与材料学院2009106130)摘要:机械优化设计是将数学规划理论、计算机技术、最优化原理与方法和机械设计相结合的一项新的科学技术。
它是一门综合性的学科,具有丰厚的理论和应用价值,是解决复杂设计问题的一种有效工具。
它是以最优化理论和方法为基础,以计算机为运算工具从众多的设计方案中寻找出最优的机械设计参数的一种现代设计方法。
因此,优化设计可以形象的表示为:专业理论+数学规划+计算机技术。
优化设计其内容包括:最优化问题基础知识、一维探索、无约束最优化问题的求解方法、约束最优化问题的求解方法、多目标函数的优化设计方法、遗传算法简介、最优化方法在压力加工、机构设计、拟合公式中的应用等。
其在工程设计中的应用如:具有独立悬挂汽车的双桥转向机构的最优化设计、内燃机连杆结构的最优化设计、凸轮机构的最优化设计、汽车变速器的最优化设计、弹簧的最优化设计、制动器的最优化设计、离合器盖结构形状的最优化设计等等。
关键词:设计机械最优化目标函数变量约束常规的设计方法进行工程设计,特别是当影响设计的因素很多时,只能得到有限候选方案中的最好方案,而不可能得到众多可能方案中的“最优设计方案”。
优秀的工程设计人员总是准备好几种候选设计方案,再从中择其“最优”,如此这样才会让所设计的项目达到更精。
然而,由于设计时间和经费的制约,所设计的候选方案的数目会受到很大限制。
“最优化设计”是在现代计算机广泛应用的基础上发展起来的一项新技术。
是根据最优化原理和方法综合各方面的因素,以人机配合方式或“自动探索”方式在计算机上进行的半自动或自动设计以选出在现有工程条件下的最佳设计方案的一种现代设计方法。
其设计原则是最优设计,设计手段是电子计算机及计算程序,设计方法是采用最优化数学方法。
实践证明,最优化设计是保证产品具有优良的性能,减轻自重或体积,降低工程造价的一种有效设计方法。
同时也可使设计者从大量繁琐和重复的计算工作中解脱出来使之有更多的精力从事创造性的设计并大大提高设计效率。
机械优化设计案例11.题目对一对单级圆柱齿轮减速器,以体积最小为目标进行优化设计。
2■已知条件已知数输入功p=58kw,输入转速n i=1000r/min,齿数比u=5, 齿轮的许用应力[、:]H=550Mpa,许用弯曲应力[:]F=400Mpa。
3■建立优化模型3.1问题分析及设计变量的确定由已知条件得求在满足零件刚度和强度条件下,使减速器体积最小的各项设计参数。
由于齿轮和轴的尺寸(即壳体内的零件) 是决定减速器体积的依据,故可按它们的体积之和最小的原则建立目标函数。
单机圆柱齿轮减速器的齿轮和轴的体积可近似的表示为:2 2 2 2 2 2v =0.25*0 -d z1) 0.25二b(d2 -d z2) -0.25(b -c)(D g2 -d g2)-d0c 0.25二l(d; d;2) 7二d; 8:d;22 2 2 2 2 2 2 2= 0.25叫m z b _d z初+m z u b _d z2b-0.8b(mzu—10m) +2 2 2 22.05bd Z2 -0.05b(mzu -10m -1.6d z2)+d zd + 28d z1 +32d z2】式中符号意义由结构图给出,其计算公式为d1= mz, d2= mz2D g2二u m1z10md g2=1.6d z2,d0=0.25(u m1z10m-1.6d z2)c =0.2b由上式知,齿数比给定之后,体积取决于b、Z1、m、l、d z1和d z2六个参数,则设计变量可取为x 二[X1 X2 X3 X4 X冷]丁=[b 乙m I d z1 d z2〕T3.2目标函数为2 2 2 2 2 2 f (x^ 0.785398(4.75X1X2X385X1X2X3-85X1X30.92X1X^X1X52 2 2 2 2 20.8x1x2x3x^ -1.6x1x3x6x4x5x4x628x532x6)—;min3.3约束条件的建立1)为避免发生根切,应有乙-為山=17,得g i(x) =17 _X2 乞0:? .:■■ b.■:min 二—T max m CO CD 2 )齿宽应满足 d , Fin和Fax为齿宽系数'd的最大值和最小值,一般取;:min =0.9, max=1.4,得g2(x) =0.9 -为(X2X3) _0g3(x) =x1;(X2X3) -1.4 乞03)动力传递的齿轮模数应大于2mm,得g4(x)=2-X3 乞04)为了限制大齿轮的直径不至过大,小齿轮的直径不能大于d1 max 彳得g5(x) 7x3 -3 0 005)齿轮轴直径的范围:dzmin - dz "/x得g6(x)=1 0 0X5 _0g7(x) =X5 -1 5 00g8(x) =1 3 0X6 岂0g9(x)=冷一2 0 0 06)轴的支撑距离1按结构关系,应满足条件:1 - b • 2:伽• 0.5dz2(可取比min =20),得g10 (x)二X1 0.5x6 - X4 - 40 _ 0 7)齿轮的接触应力和弯曲应力应不大于许用值,得g11(x) =1468250. (x2x3 _ % ) -550 - 0q12(x)=7098 2 Q-4 2 一400 —0 12X1X2X3 (0.169 0.6666 10 x^ 0.854 10 X2)g13(x)=70982 2 4 2 -400 空01X1X2X3 (0.2824 0.177 10 x^0.394 10 X2)8)齿轮轴的最大挠度;max 不大于许用值,得g 14(x ) =117.04x ;.(X 2X 3X 4) -0.003x 4 乞 09)齿轮轴的弯曲应力;w 不大于许用值['」w ,得 g i5(x )=厶](2.85"0 生)2 +2.4X101'-5.5 兰0X 5 V X 2X 3 | 61 J 2.85^ 10 沧\2 丄c 12g i6(x )=p 1( -------------- ) +6X10 —5.5 兰 0X 6 t X 2X 34■优化方法的选择由于该问题有6个设计变量,16个约束条件的优化设计问题, 采用传统的优化设计方法比较繁琐,比较复杂,所以选用 Matlab 优化工具箱中的fmincon 函数来求解此非线性优化问题,避免了 较为繁重的计算过程。
人字架的优化设计
一、问题描述
如图1所示的人字架由两个钢管组成,其顶点受外力2F=3×105N 。
已知人字架跨度2B=152 cm,钢管壁厚T=0.25cm,钢管材料的弹性模量E=2.15
10⨯ MPa ,材料密度p=7.8×103 kg /m ,许用压应力δy =420 MPa 。
求钢管压应力δ不超过许用压应力 δy 和失稳临界应力 δc 的条件下,人字架的高h 和钢管平均直径D 使钢管总质量m 为最小。
二、分析
设计变量:平均直径D 、高度h
三、数学建模
所设计的空心传动轴应满足以下条件: (1) 强度约束条件 即
δ≤⎥⎦
⎤⎢⎣⎡y δ 经整理得
(
)
[]y hTD
h
B F δπ≤+2
122
(2) 稳定性约束条件:
[]c δδ≤
(
)
(
)
(
)
2
22
222
122
8h
B D T E hTD
h B F ++≤+ππ (3)取值范围:
12010≤≤D 1000200≤≤h
则目标函数为:()22
13
57760010
5224.122min x x x f +⨯=- 约束条件为:0420577600106)(2
12
2
41≤-+⨯=x Tx x X g π
()
057760025.63272.259078577600106)(2
2
212
12
2
42≤++-+⨯=
X x x x Tx x g π010)(13≤-=x X g 0120)(14≤-=x X g
0200)(25≤-=x X g 01000)(26≤-=x X g
四、优化方法、编程及结果分析
1优化方法
综合上述分析可得优化数学模型为:()T
x x X 21,=;)(min x f ;()0..≤x g t s i 。
考察该模型,它是一个具有2个设计变量,6个约束条件的有约束非线性的单目标最优化问题,属于小型优化设计,故采用SUMT 惩罚函数内点法求解。
2方法原理
内点惩罚函数法简称内点法,这种方法将新目标函数定义于可行域内,序列迭代点在可行域内逐步逼近约束边界上的最优点。
内点法只能用来求解具有不等式约束的优化问题。
对于只具有不等式约束的优化问题
)(min x f
),,2,1(0)(..m j x j
g t s Λ=≤
转化后的惩罚函数形式为
⎰∑
=-=m
j j x g r x f r x 1
)
(1
)(),(φ 或[]
∑=--=m
j j x g r x f r x 1
)(ln )()
,(φ
式中r ——惩罚因子,它是由大到小且趋近于0的数列,即
0210→>>>Λr r r 。
[]
∑∑==-m
j m
j j j x g x g 11)(ln )(1
—障碍项—或。
由于内点法的迭代过程在可行域内进行,障碍项的作用是阻止迭代点越出可行域。
由障碍项的函数形式可知,当迭代靠近某一约束边界时,其值趋近于0,而障碍项的值陡然增加,并趋近于无穷大,好像在可行域的边界上筑起了一道“围墙”,使迭代点始终不能越出可行域。
显然,只有当惩罚因子0→r 时,才能求得在约束边界上的最优解。
3编程
首先编制两个函数文件,分别保存为目标函数和约束函数。
function f=objfun(x) B=1520;T=2.5;P=7.8e-3;
f=2*pi*P*x(1)*T*sqrt((B/2)^2+x(2)^2); 再编写非线性约束函数文件M 文件confun.m; function [c,ceq]=confun(x)
B=1520;T=2.5;P=300000;E =2.1e5;F1=420; Q=0.5*P*sqrt((B/2)^2+x(2)^2)/x(2); st=Q/(pi*T*x(1)); g(1)=st-F1;
F2=0.125*pi^2*E*(x(1)^2+T^2)/((B/2)^2+x(2)^2);
g(2)=st-F2;
ceq=[];
在MATLAB命令窗口给出搜索值和线性约束,并调用优化程序:x0=[100;700];
a=[-1,0 ;1,0 ;0 ,-1;0,1];
b=[-10;120;-200;1000];
1b=[10;200];
ub=[120;1000];
[x,fval]=fmincon(@objfun,x0,a,b,[],[],1b,ub,@confun)
4结果分析
优化程序经过11次迭代计算收敛,得到结果如下:
x=64.3083 760.0000
fval=8468.5714
圆整后得到X=(65,760)T.
图1
图2
验算:7.253)(1-=X g <0
65.782)(2-=X g <0 )(3X g <0
)(4X g <0 )(5X g <0 )(6X g <0
五、课程实践心得体会
通过《机械优化设计》这门课程的学习,初步了解和熟悉了机械优化设计的基本设计流程。
传统的机械设计往往很保守,这样就造成了材料的浪费,也增加了产品的成本。
优化方法随着计算机的应用而迅速发展起来,采用优化方法,既可以使方案在规定的设计要求下达到某些优化的结果,又不必耗费过多的计算工作量,因而得到广泛的重视,其应用也越来越广。
再本科做课程设计设计轴以及其他零件的时候,往往把尺寸加大,用这种方法来使零件满足强度要求。
这种做法在实际的生产过程中实不可取的。
因此作为一名机械专业的学生,在走向工作岗位之前了解并能够熟练运用这些方法是很有必要的。
在这2个多月的学习中,我学习了一些优化方法的原理及其求解步骤。
在实际应用中,能够对简单的问题进行分析和求解。
在这次的作业中,因为编程的基础比较薄弱,因此我运用了matlab 软件。
只要能够建立起问题的数学模型,运用matlab 很容易就能求得结果。
在做的过程当中,还是遇到了许多的问题。
虽然本题的设计变量,约束方程相对来说比较少,但在编程的时候还是出现了很多的错误。
用了很长的时间来排除这些错误。
因此如果面对的是比较复杂的问题,在编程之前一定要先做好规划。
通过这门课程的学习,开拓了我的视野。
任何的事物都在不断的发展改进,书本上所学到的各种算法也都有其局限性,随着工程问题的日益扩大,优化要面对的问题的规模和复杂程度的逐渐增大,这种局限性也就更加的明显。
因此,算法也在不断的改进,所以需要在以后及时的了解更加先进的算法,使其能够解决实际的问题。