摩巴MOBA找平自动控制系统-平衡梁
- 格式:ppt
- 大小:28.10 MB
- 文档页数:11
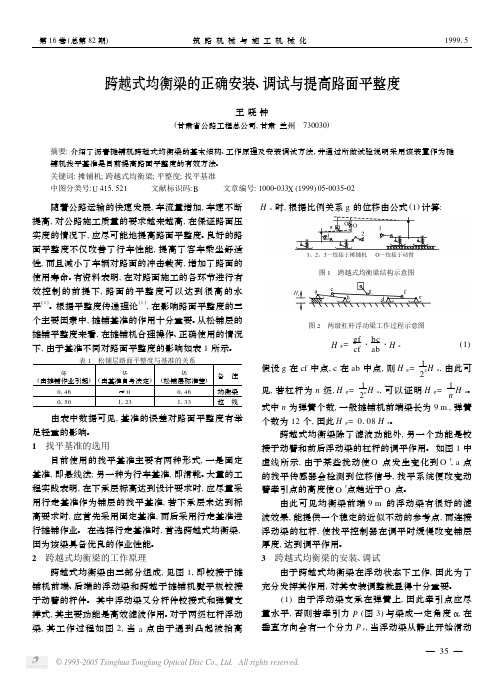
跨越式均衡梁的正确安装、调试与提高路面平整度王晓钟(甘肃省公路工程总公司,甘肃兰州 730030)摘要:介绍了沥青摊铺机跨越式均衡梁的基本结构、工作原理及安装调试方法,并通过所做试验说明采用该装置作为摊铺机找平基准是目前提高路面平整度的有效方法。
关键词:摊铺机;跨越式均衡梁;平整度;找平基准中图分类号:U4151521 文献标识码:B 文章编号:10002033X(1999)0520035202 随着公路运输的快速发展,车流量增加,车速不断提高,对公路施工质量的要求越来越高,在保证路面压实度的情况下,应尽可能地提高路面平整度。
良好的路面平整度不仅改善了行车性能,提高了客车乘坐舒适性,而且减小了车辆对路面的冲击载荷,增加了路面的使用寿命。
有资料表明,在对路面施工的各环节进行有效控制的前提下,路面的平整度可以达到很高的水平[1]。
根据平整度传递理论[1],在影响路面平整度的三个主要因素中,摊铺基准的作用十分重要。
从松铺层的摊铺平整度来看,在摊铺机合理操作、正确使用的情况下,由于基准不同对路面平整度的影响如表1所示。
表1 松铺层路面平整度与基准的关系Ρp(由摊铺作业引起)Ρr(由基准自身决定)Ρ2(松铺层标准差)备 注0146≈00146均衡梁015011231133拉 线 由表中数据可见,基准的误差对路面平整度有举足轻重的影响。
1 找平基准的选用目前使用的找平基准主要有两种形式,一是固定基准,即悬线法;另一种为行车基准,即滑靴。
大量的工程实践表明,在下承层标高达到设计要求时,应尽量采用行走基准作为铺层的找平基准,若下承层未达到标高要求时,应首先采用固定基准,而后采用行走基准进行摊铺作业。
在选择行走基准时,首选跨越式均衡梁,因为该梁具备优良的作业性能。
2 跨越式均衡梁的工作原理跨越式均衡梁由三部分组成,见图1,即铰接于摊铺机前端、后端的浮动梁和跨越于摊铺机熨平板铰接于动臂的杆件。
其中浮动梁又分杆件铰接式和弹簧支撑式,其主要功能是高效滤波作用。
摊铺机平衡梁投标文件江苏四明工程机械有限公司2009年3月目录投标资格证明材料 (3)营业执照 (3)江苏四明工程机械有限公司简介 (4)高新技术企业认定证书 (5)质量体系认证证书 (6)高新技术产品证书 (7)非接触式平衡梁业绩表(部分) (8)投标技术文件 (9)SMC-8428平衡梁产品介绍 (9)附:产品效果图 (11)平衡梁技术响应参数表 (13)发货清单 (15)随机备件清单 (16)随机(专用)工具清单 (17)质量保证 (18)售后服务 (19)投标资格证明材料营业执照江苏四明工程机械有限公司简介江苏四明工程机械有限公司是集科研、开发、制造、销售、服务于一体的高科技企业,具有科技贸易和自营进出口权。
是国内最早从事公路路面施工控制仪器研制、生产的专业制造商,旨在为路面施工行业提供最新的现代化施工产品及技术服务,并始终保持行业内专业技术的领先地位。
公司创立于1992年,始终瞄准路面机械和施工技术的最新成果和发展趋势,结合国内公路建设的实际需要,不断推出同步世界、填补国内空白的高性能和品质可靠的创新实用产品。
以其专业性、技术先进性和超值服务的核心竞争力享有品牌知名度。
为中国的行业技术进步、提升领域内整体水平做出了卓有成效的贡献。
公司现可为客户提供自行式现场路缘石滑模机,各种道路摊铺机的自动控制找平仪、输分料传感器,以及最全系列的平衡梁:多探头靴式超声波平衡梁、单探头超声波平衡梁、机械式浮动梁、电子平衡梁、多点激光平衡梁、激光扫描找平系统、复合式平衡梁(传感方式为机械与非接触相结合式平衡梁)。
能够完全适应不同的施工环境条件,满足不同客户的不同需求。
其中超声波平衡梁获“江苏省高新技术产品”称号,并以优异的品质、稳定持久的性能和合理的价格得到广大用户的支持与信赖,已成为众多知名企业的首选,目前销售累计已超八百套,也是国内最大的非接触平衡梁制造商,目前在所有国内外品牌中市场份额最大。
基于公司的强大的研发能力和无可替代的专业优势,同时可为客户提供包括摊铺机的行走控制系统、铣刨机电器及进口各品牌平衡梁的电子部件的置换、维修更新服务,亦承担各种类型摊铺机的大修或项修工作。

摊铺机自动找平研究的论文摊铺机自动找平研究的论文一:绝对基准的找平方法。
绝对基准就是钢丝绳基准。
通过测量人员放样,测量,调整钢丝绳的高程变化来改变摊铺时的厚度变化。
假设钢丝绳的高程是绝对的准确的情况下,摊铺机按钢丝绳的高程找平不出现什么失误和故障,其他的工作流程也细致无误,那么修筑出的路面就肯定是条非常平整的路面。
摊铺后的路面实际高程与设计高程一致。
钢丝绳基准的找平方法。
刚丝绳找平方法大致可分为两种—滑竿和声纳传感器。
1滑竿:滑竿的找平是利用滑竿与钢丝绳的角度变化来改变摊铺厚度的。
1)调整初始仰角。
初始仰角的调整可以控制仰角油缸的升降范围,摊铺厚度越厚就要求越大的初始仰角,调整范围随各机型而定。
滑竿与钢丝绳的角度呈45度。
2)起步。
垫木方,木方的厚度最好与所要摊铺的厚度一样厚。
一般木方垫好之后熨平板的地板前方与后方的高差在0.5—1cm之间。
这样标尺仰角的位置就大致确定了。
3)摊铺工作。
摊铺工作时把控制器调整到自动状态,起步后摊铺的厚度可能和设计高程有一定的差距。
旋转仰角提升装置把厚度调整到工作所需厚度。
摊铺工作时确保滑竿在钢丝绳上行走,无杂物将滑竿托起。
4)路过桥面,旧路面的处理方法。
一般在铺筑水泥稳定土路面的时候要求摊铺厚度不能比桥面或者旧路面高。
在找平自动的情况下滑竿还搭在钢丝绳上,看控制器的红灯向上还是向下闪烁,这时需要手动调整标尺仰角向上或是向下直至灯灭为止,实现快速找平。
有时即使仰角降到最低而摊铺厚度还是厚,这时需要抬起熨平板使用人工顺桥面或路面。
这时需要把控制器调到手动档(有数字控制盒的也可以按动数字控制盒上的手动键,但切记不要归零重设)。
5)重新起步。
重新起步时就不需要再重调或者刻意记标尺仰角的位置了,滑竿直接搭在钢丝绳上,垫上木方控制器打到自动挡就可以了。
起步后会自动检测到原先的摊铺厚度。
在横接缝处使用这种方法很方便。
前提是检测厚度和调平升降装置没有变动,手动控制盒没有归零重设的情况下。

沥青混合料摊铺机调平梁的使用一、机械接触式浮动调平梁美国BLAW-KNOX公司接触式浮动基准梁结构图机械接触式调平梁是一种浮动式调平梁,也叫机械接触式平衡梁(或机械接触式基准梁),它安装在沥青摊铺机上,能够大幅度提高沥青路面摊铺的平整度。
1、调机械接触式浮动调平梁的基本构成机械接触式浮动调平梁由前、后纵梁及跨越梁组成,前部由两组较长的纵梁(一般为9M左右)和多个滑靴组成(一般为16个左右,后部由两组较短的纵梁(一般为6M左右)和多个行走轮(一般为32个左右),前后纵梁通过跨越梁与摊铺机的熨平板部分连接在一起。
2、机械接触式浮动调平梁的工作原理调平梁前部纵梁的多个滑靴与未铺路基形成面接触,以减小路基凹凸不平的影响;后部的多个行走轮行走在新铺的路面上从而产生移动式纵向参考基准,它均衡了道路表面的不平整度;前后纵梁通过跨越梁与摊铺机的熨平板部分连接在一起,将地基误差进行多级平均,使摊铺机的自动找平控制以获得最好的信息数据,从而提高路面的平整度。
3、机械接触式浮动调平梁的特点(1)调平梁安装于摊铺机两侧,不改变摊铺机任何结构,采用分段结构,组装、拆卸、运输方便快捷。
(2)传统的摊铺机使用的基准为设置钢丝绳基准线、借用路沿或铺过的路面等等,使用调平梁后节约了时间,减少了劳动强度,提高了铺设基准精度和铺设质量。
(3)调平梁使用飞机铝材制造,重量轻、强度高、质量可靠,适用于公路施工的恶劣工。
4、机械接触式浮动调平梁在使用中存在的问题(1)前部纵梁所带的滑靴底面常与路基下封层洒布的沥青产生粘结物,对找平精度产生一定的影响;后部纵梁所带的多个行走轮在摊铺弯道(甚至非弯道)时阻力时常留下辙痕,影响已铺路面的平整度。
(2)与非接触式调平梁相比,安装、使用(尤其是在弯道、调头或转换场地)极不方便。
(3)控制精度没有非接触式调平梁高。
鉴于上述原因机械接触式浮动调平梁,已逐渐被非接触式调平梁所代替。
二、非接触式调平梁(超声波、激光)超声波非接触调平梁,利用超声波测距原理,在路面以上一定距离处使用多个声纳传感器(一般为4个),它以地面为基准精确地测出距离平均值,控制摊铺机大臂的升降高度,从而达到更好的光滑平整的摊铺效果。

抽油机游梁平衡自动调节系统的设计杜永军;于嘉骥【摘要】针对抽油机由于不平衡而造成的耗能问题,设计了一个抽油机游梁平衡自动调节系统.系统采用功率法检测抽油机的平衡度,当抽油机处于失衡状态时,系统通过步进电机驱动游梁上的平衡配重小车改变它与游梁支点的相对位置,进而调整曲柄轴上的扭矩,使抽油机重新在新平衡状态下运行.%Considering incorrect energy consumption incurred by the pumping unit's unbalance,an auto-regulating system for beam balance was designed.The system adopts the power method to detect the pumping unit's degree of balance;when the pumping unit stays at imbalance state,the system changes its position relative to beam support by driving the stepper motor-driven balance weight car on the beam so as to adjust the crankshaft torque to make the pumping unit operated under the new balance state.【期刊名称】《化工机械》【年(卷),期】2017(044)001【总页数】3页(P52-53,56)【关键词】抽油机;游梁平衡自动调节系统;动力学分析;平衡度【作者】杜永军;于嘉骥【作者单位】东北石油大学机械科学与工程学院;东北石油大学机械科学与工程学院【正文语种】中文【中图分类】TQ051.21油田现场的抽油机大多在不平衡状态下运行,对于这些失衡的抽油机,通常采用调整平衡机构的方式(如人工调整平衡块力矩的方法)使抽油机重新达到平衡的状态[1]。
筑养路机械多功能摊铺机无接触平衡梁系统的使用庞爱忠(山西路桥第一工程有限责任公司, 山西太原030006)摘要: 介绍了多功能摊铺机无接触平衡梁系统3 种方式的组成, 优缺点及其在工程中的使用情况。
关键词: 摊铺机; 无接触平衡梁; 系统; 使用中图分类号: U 415. 521 文献标识码: A文章编号: 100623528 (2003) 022*******1 3 种沥青路面摊铺机找平系统特点沥青路面施工中摊铺机找平系统主要有以下3 种方式: 接触式传感器+ 钢丝线、接触式传感器+ 接触式平衡梁、数字式传感器+ 非接触式平衡梁。
前两种方式在以往的施工中应用比较普遍, 但是在使用过程中确实存在着诸多弊端, 给施工带来很多不便。
应用最早的是接触式传感器+ 钢丝线的找平方式, 以人工设置的一段钢丝线作为参考线, 它是一个绝对基准, 其优点在于能较好地补偿路面高程误差, 在基层稳定材料和沥青下面层的摊铺中非常有效。
但是人工挂线时影响的因素太多, 测量和挂线是否准确、钢丝的张紧程度如何, 以及振动、风力和偶然因素等等的影响, 一般均方差只能控制在1. 2 左右,很难达到路面施工对平整度的要求。
接触式传感器+ 机械式平衡梁的找平方式是后来针对挂线基准的不足而提出的, 它用随主机移动的机械装置产生一个相对平直的虚拟基准线, 但是整个控制系统功能并没有丝毫改变, 因为控制器仍然是原来的, 这种方法在一定程度上提高了平整度, 而且价格不高, 所以在目前沥青路面的施工中广为采用, 但是, 也带来了很多弊端, 首先就是体积过于庞大。
另一方面, 由于这个系统是机械动作反馈, 多次拆装容易变形。
挂线钢丝与机械平衡梁系统只解决了基准问题, 控制方法、误差检测、传感器都没有改变, 仍旧采用老式的模拟控制系统, 所以平整度的提高也只是基于模拟系统而言的。
尤其在调整摊铺厚度的时候, 普遍都是通过旋转摇杆升降, 由人为估计调整, 不能精确地控制。
MOBA-matic(CAN)非接触式平衡梁系统操作手册摩巴(大连)自动控制系统有限公司中国.大连西岗区石峰街1号邮政编码:116013电话:86-411-82498011传真:86-411-82498711电子信箱:wangx@本操作手册中的文字、图片都经过了精心的制作。
尽管如此,仍可能存在一些不足。
如您有针对本操作手册的建议或指出其中的不足,请您与当地的经销商联系。
我们将认真对待您所有的建议或意见。
本手册中一些公司名称、商标名称受商标、专利保护。
版权所有,无MOBA(摩巴)书面同意,不得以任何方式进行复制、转让!定货号: 10-02-00855日期: 04.2006MOBAMobile Automation AGKapellenstr.15D-65555 LimburgInternet:www.moba.deMOBA-MaticV 4.XX 非接触式平衡梁操作手册U目录 :U1. 概述 (4)2. 产品描述 (6)3.系统一览表 (7)4.数字控制器 (8)4. 1数字控制器的描述 (8)4. 2 通电自检 (12)4. 3 传感器的识别 (12)4.4 操作菜单 (13)4.5不同用户设定 (20)5.数字坡度传感器 (21)5.1概述 (21)5.2安装 (21)5.3 数字坡度传感器的操作 (21)6.超声波滑靴传感器 (24)6.1概述 (24)6. 2安装说明和检测范围 (24)6.3超声波滑靴传感器的工作 (26)7.非接触式平衡梁 (29)7.1概述 (29)7.2功能模式 (29)7.3安装说明 (30)7.4非接触式平衡梁的操作 (32)8. 保养维护 (34)9.故障时的补救措施 (34)10.认证声明 (36)1.概述修改权我们力求操作手册的准确及更新。
但为确保我们技术的领先地位,我们有权在没有事先通知的情况下,对我们的产品及其操作作出与本手册不一致的改动。
我们对由此而产生的故障、损失均不负责!包装及储存为确保运输安全,本产品包装严格仔细。
MOBA-matic(CAN)非接触式平衡梁系统操作手册摩巴(大连)自动控制系统有限公司中国.大连西岗区石峰街1号邮政编码:116013电话:86-411-82498011传真:86-411-82498711电子信箱:wangx@本操作手册中的文字、图片都经过了精心的制作。
尽管如此,仍可能存在一些不足。
如您有针对本操作手册的建议或指出其中的不足,请您与当地的经销商联系。
我们将认真对待您所有的建议或意见。
本手册中一些公司名称、商标名称受商标、专利保护。
版权所有,无MOBA(摩巴)书面同意,不得以任何方式进行复制、转让!定货号: 10-02-00855日期: 04.2006MOBAMobile Automation AGKapellenstr.15D-65555 LimburgInternet:www.moba.deMOBA-MaticV 4.XX 非接触式平衡梁操作手册U目录 :U1. 概述 (4)2. 产品描述 (6)3.系统一览表 (7)4.数字控制器 (8)4. 1数字控制器的描述 (8)4. 2 通电自检 (12)4. 3 传感器的识别 (12)4.4 操作菜单 (13)4.5不同用户设定 (20)5.数字坡度传感器 (21)5.1概述 (21)5.2安装 (21)5.3 数字坡度传感器的操作 (21)6.超声波滑靴传感器 (24)6.1概述 (24)6. 2安装说明和检测范围 (24)6.3超声波滑靴传感器的工作 (26)7.非接触式平衡梁 (29)7.1概述 (29)7.2功能模式 (29)7.3安装说明 (30)7.4非接触式平衡梁的操作 (32)8. 保养维护 (34)9.故障时的补救措施 (34)10.认证声明 (36)1.概述修改权我们力求操作手册的准确及更新。
但为确保我们技术的领先地位,我们有权在没有事先通知的情况下,对我们的产品及其操作作出与本手册不一致的改动。
我们对由此而产生的故障、损失均不负责!包装及储存为确保运输安全,本产品包装严格仔细。