船舶航向稳定性与回转性
- 格式:ppt
- 大小:929.50 KB
- 文档页数:15

船舶操纵问答题1、何谓航向稳定性?如何判别?答:船舶航⾏中受到风、浪、流等极⼩的外界⼲扰作⽤,使其偏离原来运动状态。
在外来⼲扰消失后,保持正舵的条件下,船舶能回到原来运动状态的能⼒。
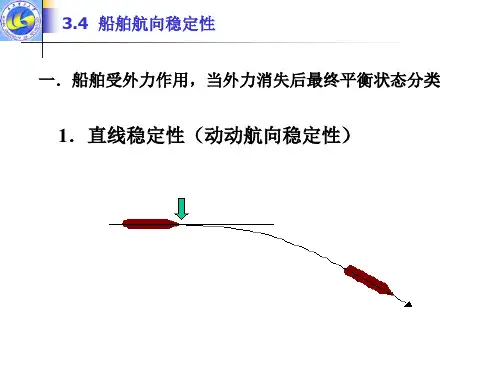
判别:1)外⼒⼲扰消失后,在正舵条件下,如船舶最终能以⼀个新航向作直线运动,称直线稳定性;2)外⼒消失后,在正舵条件下,如船舶最终能恢复到原航向上作直线运动,仅与原来运动轨迹存在⼀个偏量,称⽅向稳定性;3)外⼒⼲扰消失后,在正舵条件下,如船舶最终能⾃⾏恢复到原来航线上,航向与原航向相同,且运动轨迹⽆偏离,称具有位置稳定性;4)外⼒⼲扰消失后,最终进⼊⼀个回转运动,称该船不具备航向稳定性;2、何谓航向改变性?哪些因素影响航向改变性?答:表⽰船舶改向灵活的程度,通常由原航向改驶新航向时,到新航向的距离来表⽰船舶改向性的优劣。
航向改变性通常⽤初始回转性能和偏转抑制能⼒来衡量。
初始回转性能是指船舶对操舵改变航向的快速响应性能:由操舵后船舶航进⼀定距离上船⾸转过的⾓度⼤⼩来衡量;偏转抑制性能:指船舶偏转中操正舵、反向压舵,使船舶停⽌偏转保持直线航⾏的性能;影响航向改变性的因素:1)⽅型系数Cb⼤,旋回性好;2)舵⾓:⼤舵⾓,旋回性好;3)吃⽔与吃⽔差;4)横倾;5)浅⽔;6)其他因素:(如强风、强流等)3、掌握船舶变速性能(冲程、冲时)对船舶操纵有何意义?影响紧急停船距离(冲程)的因素有哪些?答:前进中的船舶完成变速过程中所前进的距离,称为冲程,所经历的时间,称为冲时。
当船舶进⾏启动、变速、停车、倒车时因惯性的存在,采取上述措施时,需经⼀段时间,航⾏⼀段距离,才能从⼀种定常运动状态改变到另⼀种运动状态。
意义:在实际操纵船舶时,应充分考虑到本船的冲程和冲时(即考虑⼀提前量)才能得⼼应⼿地及时将船停住或避让来往船舶或及时避开障碍物,才能采取⼀切有利于安全航⾏的措施,避免紧迫局⾯和事故的发⽣。
尤其要掌握倒车停船性能,当快速航进中,遇到紧急情况时,只有在充分了解本船的紧急停船距离,才能避免碰撞的发⽣。
操纵性绪论操纵性定义:船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。
操纵性内容:1. 航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
2.回转性:表示船舶在一定舵角作用下作圆弧运动的性能。
3.转首性和跟从性:表示船舶应舵转首及迅速进入新的稳定运动状态的性能。
4. 停船性能:船舶对惯性停船和盗车停船的相应性能。
附加质量和附加惯性矩:作不定常运动(操纵和耐波运动)的船舶,除了船体本身受到愈加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度。
根据作用力和反作用力,水对船体存在反作用力,这个反作用力称为附加惯性力。
附加惯性力是与船的加速度成比例的,其比例系数称为附加质量。
船舶操纵一、操纵运动方程1.1坐标系一、固定坐标系:固定坐标系是固结在地球表面,不随时间而变化的,如图所示。
首向角ψ:X 0与X 的夹角(由X 0转向X ,顺时针为正)。
二、运动坐标系:运动坐标系是固结在船体上的,随船一起运动的,如图所示。
重心坐标:X OG 、Y OG ; 船速:V 重心G 瞬时速度; 航速角ψ0:X0轴与船速V 夹角(顺时针为正);漂角:β船速与X 轴夹角(顺时针为正); 回转角速度:γ=dψdt;回转曲率:R 右舷为正; 舵角:δ左舷为正。
三、枢心:回转时漂角为零点、横向速度为零的点。
1.2线性运动方程一、坐标转换00cos sin sin cos ψψψψ=-=+G G x u v y u v二、简化方程当重心在原点处:X G =0 运动坐标系一般方程:三、对于给定船型、给定流体中的运动情况船型参数和流体特性为已知条件; 操纵运动为缓变过程,忽略高阶小量; 忽略推进器转速影响;操舵过程短暂,忽略转舵加速度。
则可将给定船型流体中受力情况表示如下:由泰勒展开式,用水动力导数表示如下:四、简化后的操纵运动线性方程式:2()()()ψψψψψψ=--=++=++G G Z G X m u v x Y m v u x N I mx vu 00cos sin ψψ=+G G X mx my 00cos sin ψψ=-G G Y mymx ()()ψψψ=-=+=z X m u v Y m v u NI (,,,,,,)(,,,,,,)(,,,,,,)X X u v r u v r Y Y u v r u v r N N u v r u v r δδδ===v r v r v r v r Y Y v Y r Y v Y r Y N N v N r N v N r N δδδδ=++++=++++111()()v ur v u u r r v u r+=++∆+∆=+1.3水动力导数一、定义:匀速直线运动时,只改变一个运动参数,其他不变引起的作用于船舶水动力对运动参数的变化率。
船舶的操纵性能(旋回性、冲程、保向性、改向性以及船舶变速运动性能)船舶驾驶人员必须较好地掌握船舶操纵知识,了解本船的操纵性能以及各种外界条件对本船操纵性能的影响,才能正确操纵船舶;准确控制船舶的运动。
往往一艘操纵性能良好的船舶,具有稳定地保持运动状态和迅速准确地改变运动状态的性能。
一、旋回性能是船舶操纵中的重要部分,它包括的因素有偏移或反移量、进距、横距、旋回初径、漂角、转心、旋回时间、旋回中的降速和横倾等。
这些数值是在船舶满载,半载以及空载等不同的状态下实测所得,掌握这些要素,对避让船舶、狭窄区域旋回或掉头等情况下安全操纵船舶有着重要的作用,也是判定船舶是否处于安全操纵范围内的重要参数。
偏移或反移量(KICK)是船舶重心向转舵相反一舷横移的距离,满载时其最大值约为船长的1%左右,但船尾的反移量较大,其最大值约为船长的1/10—1/5,可趁利避害的加以运用,如来船已过船首,且可能与船尾有碰撞危险,紧急情况下可向来船一侧满舵利用反移量避免碰撞(有人落水时向人落水一舷操满舵也是利用该反移量);进距(ADVCNCE)是开始转舵到航向转过任一角度时中心所移动的纵向距离,旋回资料中提供的纵距通常特指转过90度的进距,即最大进距,其值约为旋回初径的0.85—1.0倍,熟练掌握可常帮助我们正确判断船首来船或危险的最晚避让距离;横距(TRANSPER)是开始转舵到航向90度时船舶中心所一定的横向距离,其值约为旋回初径的0.55倍;旋回初径(TACTICAL DIAMETER)是船舶开始转舵到航向180度时重心所移动的横向距离,其值约为3-6倍船长;旋回直径(PINAL IAMETER)是船舶做定常旋回运动时的直径,约为旋回初径的0.9-1.2倍。
漂角(DRIPT AUGTE)是船舶旋回中船首与重心G点处旋回圈切线的方向夹角,其值约在3度—15度之间,漂角约大,其旋回性能越好;转心P是旋回圈的曲率中心O到船舶首尾线所做垂线的垂点,该点处的漂角和横移速度为零,转心P约在船首柱后1/3-1/5船长处,因此,旋回中尾部偏外较船首里为大,操船是应特别注意;旋回时间是旋回360度所需要的时间,它与排水量有密切关系,排水量大,旋回时间增加,比如万吨船快速满舵旋回一周约为6MIN,而超大型船舶旋回时间几乎增加一倍;旋回中的降速系由船体斜航阻力增加,舵阻力以及推进效率降低而造成的,所降部分为航速的1/4-2/4不等;旋回产生的横倾,它是一个应注意的不安全因素,旋回初出现向用舵方向一侧的内倾,倾角较小,时间也较短,不久随着转头角度速度增加,将出现向用舵反侧的外倾,对于GM值较小的集装箱船等,在操纵中应特别注意。
流场变化对船舶航行稳定性影响一、流场变化概述流场变化是指在船舶航行过程中,由于水流、风速、风向等因素的变化,导致船舶所处水域的流体动力学环境发生变化的现象。
这些变化对船舶的航行稳定性有着直接且显著的影响。
船舶在设计和建造时,需要充分考虑流场变化对航行稳定性的影响,以确保船舶在各种环境条件下都能安全、高效地航行。
1.1 流场变化的类型流场变化主要包括以下几种类型:- 流速变化:水流速度的增加或减少,会对船舶的动态响应产生影响。
- 流向变化:水流方向的改变,可能导致船舶受到侧向力,影响船舶的航向稳定性。
- 风速和风向变化:风速的增加或风向的改变,会对船舶的上浪和侧倾产生影响。
- 波浪变化:海浪的高度、周期和方向的变化,会对船舶的动态稳定性造成影响。
1.2 流场变化对船舶航行稳定性的影响流场变化对船舶航行稳定性的影响主要体现在以下几个方面:- 船舶的航速:流场变化会影响船舶的阻力和推进效率,进而影响航速。
- 船舶的航向:流向变化和风向变化可能导致船舶偏离预定航向。
- 船舶的稳定性:波浪和风浪的变化会影响船舶的横倾和纵倾稳定性。
- 船舶的操纵性:流场变化会影响船舶的操纵性能,如转向响应和回转性能。
二、流场变化对船舶航行稳定性的影响分析2.1 流速变化对船舶航行稳定性的影响流速的增加会导致船舶受到更大的水动力,这可能会增加船舶的阻力,降低推进效率,从而影响船舶的航速和燃油消耗。
同时,流速的增加也可能导致船舶受到更大的波浪冲击,影响船舶的动态稳定性。
2.2 流向变化对船舶航行稳定性的影响流向的变化会使船舶受到侧向力,这可能导致船舶偏离预定航向,需要通过调整舵角来维持航向。
此外,流向变化还可能与船舶的自旋力相互作用,影响船舶的操纵性和稳定性。
2.3 风速和风向变化对船舶航行稳定性的影响风速的增加会增加船舶受到的风压,可能导致船舶产生较大的上浪和侧倾。
风向的变化则可能使船舶受到侧向风力,影响船舶的航向和稳定性。
操纵性绪论操纵性定义:船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。
操纵性内容:1. 航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
2.回转性:表示船舶在一定舵角作用下作圆弧运动的性能。
3.转首性和跟从性:表示船舶应舵转首及迅速进入新的稳定运动状态的性能。
4. 停船性能:船舶对惯性停船和盗车停船的相应性能。
附加质量和附加惯性矩:作不定常运动(操纵和耐波运动)的船舶,除了船体本身受到愈加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度。
根据作用力和反作用力,水对船体存在反作用力,这个反作用力称为附加惯性力。
附加惯性力是与船的加速度成比例的,其比例系数称为附加质量。
船舶操纵一、操纵运动方程1.1坐标系一、固定坐标系:固定坐标系是固结在地球表面,不随时间而变化的,如图所示。
首向角ψ:X 0与X 的夹角(由X 0转向X ,顺时针为正)。
二、运动坐标系:运动坐标系是固结在船体上的,随船一起运动的,如图所示。
重心坐标:X OG 、Y OG ; 船速:V 重心G 瞬时速度; 航速角ψ0:X0轴与船速V 夹角(顺时针为正);漂角:β船速与X 轴夹角(顺时针为正); 回转角速度:γ=dψdt;回转曲率:R 右舷为正; 舵角:δ左舷为正。
三、枢心:回转时漂角为零点、横向速度为零的点。
1.2线性运动方程一、坐标转换00cos sin sin cos ψψψψ=-=+G G x u v y u v二、简化方程当重心在原点处:X G =0 运动坐标系一般方程:三、对于给定船型、给定流体中的运动情况船型参数和流体特性为已知条件; 操纵运动为缓变过程,忽略高阶小量; 忽略推进器转速影响;操舵过程短暂,忽略转舵加速度。
则可将给定船型流体中受力情况表示如下:由泰勒展开式,用水动力导数表示如下:四、简化后的操纵运动线性方程式:2()()()ψψψψψψ=--=++=++G G Z G X m u v x Y m v u x N I mx vu 00cos sin ψψ=+G G X mx my 00cos sin ψψ=-G G Y mymx ()()ψψψ=-=+=z X m u v Y m v u NI (,,,,,,)(,,,,,,)(,,,,,,)X X u v r u v r Y Y u v r u v r N N u v r u v r δδδ===v r v r v r v r Y Y v Y r Y v Y r Y N N v N r N v N r N δδδδ=++++=++++11111()()()()()()()()v v G r r G v v z r G r v ur v u u r r v u rm Y v Y v mx Y r mu Y r Y mx N v N v I N r mx u N r N δδδδ+=++∆+∆=+--+-+-=--+-+-=1.3水动力导数一、定义:匀速直线运动时,只改变一个运动参数,其他不变引起的作用于船舶水动力对运动参数的变化率。
首向角:船舶纵剖面与OoXo轴的交角。
漂角:重心速度与GX轴正方向夹角。
航速角:重心瞬时速度矢量与OoXo轴夹角。
船舶操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变其航速、航向和位置的性能。
包括小舵角的航向稳定性、中舵角的航向机动性和大舵角的紧急规避性。
内容如下:1. 航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
2.回转性:表示船舶在一定舵角作用下作圆弧运动的性能。
3.转首性和跟从性:表示船舶应舵转首及迅速进入新的稳定运动状态的性能。
4. 停船性能:船舶对惯性停船和盗车停船的相应性能。
枢心:回转时漂角为零点、横向速度为零的点。
附加惯性力:作不定常运动的船舶,除本身受到与加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度,根据作用与反作用力原理,水对船体存在反作用力,这个力称为。
附加质量:附加惯性力是与船的加速度成比例的,其比例系数称为。
水动力导数:位置导数 Yv ,Nv:船体受到一个升力Yv,船体首部和尾部长力方向一致,v都都指向v的负方向,因此合力是一个较大的负值,Yv是一个较大的负值,而水动力矩由于首尾作用相抵消,其绝对值不会很大,因机翼的水动力中心在形成之前,首部作用占优,Nv是一个不大的负值。
加速度导数:Yv点是水动力Y相对于加速度在平衡状态下的变化率,正的加速度的船舶经受一个与加速度相反方向的水反作用力,因此Yv点是一个相当大的负值。
由于船首和船尾对Z轴产生的水动力力矩方向相反,因此水动力矩导数Nv点是一个不大的数值,其符号取决于船型。
旋转导数Yr ,Nr:由于船首和船尾水动力方向相反,因此水动力导数Yr的绝对值不是很大,其符号取决于船型,可正可负。
由于船体回转产生的水动力矩在船首尾有相同的方向,都是阻止船舶回转的,因此水动力矩导数Nr是一个很大的负值。
第一章船舶操纵性能基本概念1.船舶操纵性能可分为固有操纵性和控制操纵性,固有操纵性:包括追随性、定长旋回性、航向稳定性;控制操纵性:包括改向性、旋回性、保向性。
2.转心:从瞬时轨迹曲率中心O 点作船舶首尾线的垂线可得瞬时转动中心P 点,简称“转心”。
船舶定常旋回时,一般转心位于船首之后约1/3 - 1/5 船长处;尾倾时,转心后移,首倾时,转心前移。
3.漂角:漂角是指船体上一点的船速矢量与船舶首尾线之间的交角;漂角一般指船舶重心处的漂角,用符号β 表示,左舷为负,右舷为负。
4.水动力及其力矩:水给予船舶的运动方向相反的力。
5.水动力作用中心:水动力作用中心是指船体水下部分的面积中心,随漂角β 的增大而逐渐向后移动。
船舶平吃水时,当漂角为0,船舶向前直航时,水动力中心在船首之后约1/4 船长处,且船速越低,越靠近船中;⏹当漂角为180º,即船舶后退时,水动力中心在距离船尾之前约1/4 船长处,且船退速越低,越靠近船中。
⏹船舶空载或压载时往往尾倾较大,船体水下侧面积中心分布在船中之后,水动力作用中心要比满载平吃水时明显后移。
6.引航卡(Pilot Card):船长与引航员之间关于船舶操纵性能进行信息沟通的资料卡;每航次由船长填写;内容包括本船的主尺度、操纵装置性能、船在不同载况时主机不同转速下的航速以及船舶特殊操纵装置(侧推器)等信息。
7.驾驶台操纵性图(Wheelhouse Poster):详细概述船舶旋回性能和停船性能的图表资料;置于驾驶台显著位置;内容包括深水和浅水(=1.2),满载和压载情况下船舶的旋回圈轨迹图及制动性能(停船试验)资料。
8.船舶操纵手册(Maneuvering Booklet):详细描述船舶实船操纵性试验结果的手册;它是重要的船舶资料之一;内容包括旋回试验、Z形操纵试验和停船试验的试验条件、试验记录以及试验分析等;操纵手册包括全部驾驶台操纵性图上的全部信息;除实船试验结果之外,操纵手册中的大部分操纵信息估算结果。