四通道电液伺服系统
- 格式:pdf
- 大小:380.47 KB
- 文档页数:19
电液系统摘要:电液系统具有相应快速、控制灵活等优点而广泛应用于现代工业中,对促进工业发展具有重要的作用。
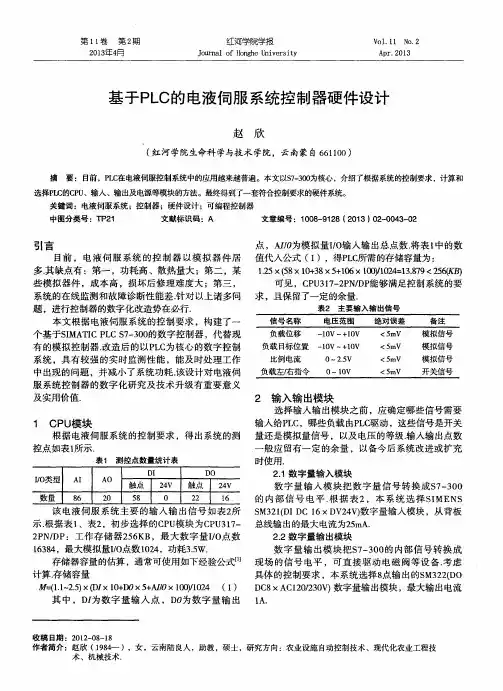
本文从电液控制系统的建模以及电液元件(伺服阀、比例阀)研究状况、电液系统的未来发展趋势三方面进行了阐述.关键词:电液系统;建模;比例阀;伺服阀;发展趋势1前言18世纪欧洲工业革命时期,多种液压机械装置特别是液压阀得到开发和利用,19世纪液压技术取得进展,包括采用油作为工作流体和采用电来驱动方向控制阀,20世纪50—60年代是电液元件和技术发展的高峰期,在军事应用中得到广泛应用[1]。
液压技术是以液体为工作介质,实现能量传递、转换、分配及控制的一门技术。
液压系统因其响应快、功率体积比较大、抗负载刚度大以及传递运动平稳等优点而广泛应用于冶金、化工、机械制造、航空航天、武器装备等领域[2]。
随着液压技术与微电子技术、传感器技术、计算机控制等技术的结合,电液技术成为现代工程控制中不可或缺的重要技术手段和环节。
电液技术既有电气系统快速响应和控制灵活的优点,又有液压系统输出功率大和抗冲击性好等优点[3]。
韩俊伟对电液伺服系统的发展历史、研究现状和系统集成技术的应用进行了全面阐述,通过介绍电液伺服系统在力学环境模拟实验系统中的应用,分析了电液伺服系统的集成设计,比较了我国在电液伺服系统技术研究中的优劣势,指出电液伺服系统的未来发展趋势与挑战[4]。
许梁等从电液元件、电液控制系统、现代电液控制策略三方面对电液系统进行了阐述,指出了电液发展趋势[5]。
陈刚等从电液元件、电液控制系统、计算机在电液系统中应用、现代控制理论的电液技术方面对电液系统进行了阐述,对于现代控制理论的电液技术,从PID调节、状态反馈控制、自适应控制、变结构控制、模糊逻辑控制、神经网络控制进行了探究[6].本文从电液系统的建模、电液元件(比例阀、伺服阀)、发展趋势研究进行综述.2系统的建模伺服系统是一个由多个环节构成的复杂的动力学系统,而且是一种典型的非线性时变系统。
电液伺服系统电液伺服系统是一种将电气信号转换为液压能量的控制系统。
它通过控制液压阀的开启和关闭来调节液压执行器的工作状态,从而实现对机械装置的精确控制。
本文档将详细介绍电液伺服系统的结构、工作原理、常见问题及解决方案等内容。
一、系统结构1.1 主机部分主机部分是电液伺服系统的核心组成部分,包括电液转换器、伺服阀、传感器等。
其中,电液转换器将电信号转换为液压能量,伺服阀通过控制液压流量来控制液压执行器的运动,传感器用于监测执行器的位置和速度。
1.2 液压执行器液压执行器是电液伺服系统中的重要组成部分,主要包括液压缸和液压马达两种。
液压缸可将液压能量转换为机械能,实现直线运动;液压马达则可将液压能量转换为机械能,实现旋转运动。
1.3 控制部分控制部分由控制器和信号处理器组成,用于接收、处理和传输控制信号。
控制器可根据输入信号的变化调节伺服阀的开启度,从而实现对电液伺服系统的精确控制。
二、工作原理2.1 系统工作流程电液伺服系统的工作流程一般包括输入信号采样、信号处理、控制指令、伺服阀控制和液压执行器动作等步骤。
具体流程如下:(1)输入信号采样:传感器将液压执行器的位置和速度等信息转换为电信号,并传输给信号处理器。
(2)信号处理:信号处理器对输入信号进行滤波、放大等处理,将其转换为控制系统可识别的信号。
(3)控制指令:控制器根据输入信号的变化相应的控制指令。
(4)伺服阀控制:控制器根据控制指令调节伺服阀的开启度,控制液压系统的流量大小。
(5)液压执行器动作:伺服阀的控制信号作用于液压执行器,使其按照要求的位置和速度进行运动。
2.2 系统控制策略电液伺服系统可采用位置控制、速度控制和力控制等不同的控制策略。
其中,位置控制可实现对执行器位置的精确控制;速度控制可实现对执行器速度的精确控制;力控制可实现对执行器施加的力或扭矩的精确控制。
三、常见问题及解决方案3.1 液压系统压力不稳定可能原因:(1)供油系统压力不稳定。

伺服控制器的多通道控制与应用指南伺服控制器是一种高精度控制设备,被广泛应用于机器人、机床、自动化生产线等领域。
随着科技的不断发展,多通道控制成为伺服控制器的一个重要特性之一。
本篇文章将从多通道控制的相关技术及其应用出发,为大家详细介绍一下伺服控制器的多通道控制与应用指南。
一、多通道控制的技术原理多通道控制是指在同一台伺服控制器中同时控制多个运动轴,通过多通道控制实现对多个轴的精密控制。
多通道控制的技术原理主要包括以下几个方面:1.硬件支持多通道控制需要硬件上的支持,伺服控制器中的CPU预留了多个运动轴控制通道,并配备了相应的数字信号处理器和运动控制芯片,以满足多通道控制的需求。
2.数据同步多通道控制要求多个运动轴的数据同步。
伺服控制器中通过时钟同步技术和数据同步技术,可在微秒级别上实现多个轴的同步控制。
3.坐标变换多通道控制需要对多个轴的位置、速度、加速度等参数进行坐标变换。
伺服控制器中的坐标变换器可以实现从虚拟坐标系到实际坐标系的转换,以满足多通道控制的需求。
4.运动插补多通道控制要求实现多轴的同步运动控制,在实现多轴控制的同时需要进行插补计算、轨迹平滑等处理。
伺服控制器中的运动插补模块可以高效地计算多轴的运动轨迹,并对运动轨迹进行优化和平滑处理。
二、多通道控制在生产中的应用1.机床加工在机床加工行业中,多通道控制可实现复杂零部件的高精度加工。
例如,通过用伺服电机控制数控刀架和工作台的位置和速度,可以实现多角度、多面加工,提高了加工效率和精度。
2.自动化生产线在自动化生产线中,多通道控制可以同时控制多个机器人臂、传送带或其他运动装置,从而实现高效的自动化生产。
例如,在汽车制造业中,多通道控制可以实现对车身的多轴位安装,提高了车身安装精度。
3.医疗机器人在医疗机器人领域,多通道控制可实现对多个关节的精确控制,提高了手术的精度和安全性。
例如,通过用伺服电机来控制手术机器人的多个关节,可以实现对患者肢体的高精度操作,减少手术风险。
电液伺服控制系统概述摘要:电液伺服控制是液压领域的重要分支。
多年来,许多工业部门和技术领域对高响应、高精度、高功率——重量比和大功率液压控制系统的需要不断扩大,促使液压控制技术迅速发展。
特别是控制理论在液压系统中的应用、计算及电子技术与液压技术的结合,使这门技术不论在原件和系统方面、理论与应用方面都日趋完善和成熟,并形成一门学科。
目前液压技术已经在许多部门得到广泛应用,诸如冶金、机械等工业部门及飞机、船舶部门等。
关键词:电液伺服控制液压执行机构伺服系统又称随机系统或跟踪系统,是一种自动控制系统。
在这种系统中,执行元件能以一定的精度自动地按照输入信号的变化规律动作。
液压伺服系统是以液压为动力的自动控制系统,由液压控制和执行机构所组成。
一、电液控制系统的发展历史液压控制技术的历史最早可以追溯到公元前240年,一位古埃及人发明的液压伺服机构——水钟。
而液压控制技术的快速发展则是在18世纪欧洲工业革命时期,在此期间,许多非常实用的发明涌现出来,多种液压机械装置特别是液压阀得到开发和利用,使液压技术的影响力大增。
18世纪出现了泵、水压机及水压缸等。
19世纪初液压技术取得了一些重大的进展,其中包括采用油作为工作流体及首次用电来驱动方向控制阀等。
第二次世界大战期间及战后,电液技术的发展加快。
出现了两级电液伺服阀、喷嘴挡板元件以及反馈装置等。
20世纪50~60年代则是电液元件和技术发展的高峰期,电液伺服阀控制技术在军事应用中大显身手,特别是在航空航天上的应用。
这些应用最初包括雷达驱动、制导平台驱动及导弹发射架控制等,后来又扩展到导弹的飞行控制、雷达天线的定位、飞机飞行控制系统的增强稳定性、雷达磁控管腔的动态调节以及飞行器的推力矢量控制等。
电液伺服驱动器也被用于空间运载火箭的导航和控制。
电液控制技术在非军事工业上的应用也越来越多,最主要的是机床工业。
在早些时候,数控机床的工作台定位伺服装置中多采用电液系统(通常是液压伺服马达)来代替人工操作,其次是工程机械。
浅谈航空领域中电液伺服系统应用1 引言近年来,电液伺服系统在航空、航天、军事等领域中得到广泛的应用。
什么是电液伺服系统,电液伺服系统相较于其他控制系统有什么独到之处,航空领域中有哪些普遍应用,本文将围绕以上问题进行简要地介绍。
飞机液压系统组成图2 基本概念2.1电液伺服系统“伺服”一词来源于希腊语中的“奴隶”。
顾名思义,电液伺服系统即是指用电信号驱动伺服元件的液压反馈控制系统。
电液伺服系统仿真模型在电液伺服反馈控制系统中,执行装置的实际输出量作用于控制对象,反馈元件监测控制对象状态信息产生电反馈信号,借助比较元件将反馈信号与规划指令进行比较,得到误差信号,经过相应的算法控制器处理后,通过放大元件生成控制指令传递给控制装置,引导执行装置下一步的动作。
电液伺服系统信号传递图2.2伺服元件电液伺服系统中的伺服元件包括伺服阀与伺服泵。
传统液压系统中的换向阀只能用于流向的改变,而不能改变流量与压力的大小,无法满足现代工业控制的需求。
为了满足人们对于“伺服”的需要,能够对压力、流量按比例地进行控制的比例阀,精度进一步提高的伺服阀以及介于两者间的比例伺服阀便应运而生。
而比例阀通常用于开环控制系统中,故狭义来讲不算做伺服元件。
伺服泵则是指通过伺服电机来控制的液压泵,可以精确控制输出功率,根据工况要求供给合适流量的液压油,具有节约能源、降低油温、减少噪声等优点。
3 系统特性传统液压伺服系统作为早期机载作动系统,采用液压信号作为控制信号传递的媒介,尽管有着输出功率大、可无级调速的优点,但其信号传递速度慢、延迟较高,不利于进行复杂综合运算,控制效果不理想,且能量损失较大,机身散热性差。
针对上述问题,电液伺服系统采用电信号取代液压信号,在保留液压系统优点的同时也有着自己的独到之处:(1)控制装置与执行装置频率响应快。
电液伺服系统中采用电液伺服阀作为控制装置,其固有频率通常在100Hz以上,能够实现高速启动、制动与换向。
XD293-16 DIP16 XL293-20 SOP20600mA OUTPUT CURRENT CAPABILITY PER CHANNEL1.2A PEAK OUTPUT CURRENT (non repeti-tive) PER CHANNEL ENABLE FACILITYOVERTEMPERATURE PROTECTIONLOGICAL "0" INPUT VOLTAGE UP TO 1.5 V (HIGH NOISE IMMUNITY)INTERNAL CLAMP DIODESDESCRIPTIONThe Device is a monolithic integrated high volt-age, high current four channel driver designed to accept standard DTL or TTL logic levels and drive inductive loads (such as relays solenoides, DC and stepping motors) and switching power tran-sistors.To simplify use as two bridges each pair of chan-nels is equipped with an enable input. A separate supply input is provided for the logic, allowing op-eration at a lower voltage and internal clamp di-odes are included.This device is suitable for use in switching appli-cations at frequencies up to 5 kHz.The XD293-16 is assembled in a 16 lead plastic packaage which has 4 center pins connected to-gether and used for heatsinkingThe XL293-20 is assembled in a 20 lead surface mount which has 8 center pins connected to-gether and used for heatsinking.BLOCK DIAGRAMABSOLUTE MAXIMUM RATINGSTHERMAL DATAUnit SO DIP –14Thermal Resistance Junction-pins max.°C/W 50 (*)80Thermal Resistance junction-ambient max.°C/W–14Thermal Resistance Junction-case max.(*) With 6sq. cm on board heatsink.PIN CONNECTIONS(Top view)ELECTRICAL CHARACTERISTICS (for each channel, V S = 24 V, V SS = 5 V, T amb = 25 °C, unless otherwise specified)(*) See fig. 1.Figure 1: Switching TimesTRUTH TABLE (one channel) ArrayZ = High output impedance(*) Relative to the considered channelFigure 2:Junction to ambient thermal resistance vs. area on board heatsinkSOPDIP。
电液伺服系统的优化设计与控制研究概述电液伺服系统是一种将电力与液压技术相结合的控制系统,能够实现高精度、快速响应的运动控制。
在工业自动化、航空航天等领域有广泛的应用。
本文将围绕电液伺服系统的优化设计与控制展开研究,深入探讨相关技术和方法。
一、电液伺服系统的组成与工作原理电液伺服系统由电气控制部分和液压执行部分组成。
电气控制部分包括传感器、控制器、电动机等,液压执行部分包括液压阀、液压缸等。
电液伺服系统的工作原理是通过电气信号控制液压系统的动作,实现位置、速度、力矩等的精确控制。
二、电液伺服系统的优化设计电液伺服系统的优化设计是提高系统性能、减少能耗和延长使用寿命的重要环节。
主要包括以下几个方面的工作:1. 参数优化:通过对系统参数的合理设计和选择,提高系统的控制性能。
包括选取合适的电动机、液压阀、液压缸等,并确定其参数值,以满足系统的需求。
2. 结构优化:通过对系统结构的调整和优化,减少系统的复杂性和能耗。
可以采用流量分配器、减压阀等组件来改善系统的性能。
同时,还需要考虑系统的可维护性和可靠性。
3. 控制算法优化:选用合适的控制算法,优化系统的响应速度、稳定性和精度。
常用的控制算法包括比例控制、积分控制、PID控制等。
还可以采用模型预测控制、自适应控制等高级控制方法,提高系统的性能。
三、电液伺服系统的控制研究电液伺服系统的控制是其研究的核心内容。
在实际应用中,为了满足不同的控制需求,需要研究和开发相应的控制方法和技术。
以下是几个常见的控制研究方向:1. 位置控制:电液伺服系统可以实现高精度的位置控制。
可以通过采用编码器等传感器,将位置信号反馈给控制器进行闭环控制。
同时,还可以采用滤波器、补偿器等技术,减少位置误差和振荡现象。
2. 力矩控制:对于需要精确控制力矩的应用场景,如机械臂、液压切割等,通过采用力传感器等设备,可以实现对力矩的精确控制。
需要研究合适的力矩控制算法和技术,提高系统的控制精度。
第2章电液伺服控制技术及应用电液伺服系统是一种采用电液伺服机构,根据液压传动原理建立起来的自动控制系统。
在这种系统中,执行元件的运动随着控制信号的改变而改变。
2.1 电液伺服阀伺服阀通过改变输入信号,连续的、成比例地控制液压系统的流量或压力。
电液伺服阀输入信号功率很小(通常仅有几十毫瓦),功率放大系数高;能够对输出流量和压力进行连续双向控制。
其突出特点是:体积小、结构紧凑、直线性好、动态响应好、死区小、精度高,符合高精度伺服控制系统的要求。
电液伺服阀是现代电液控制系统中的关键部件,它能用于诸如位置控制、速度控制、加速度控制、力控制等各方面。
因此,伺服阀在各种工业自动控制系统中得到了越来越多的应用。
2.1.1 工作原理及组成1 基本组成与控制机理电液伺服阀是一种自动控制阀,它既是电液转换组件,又是功率放大组件,其功用是将小功率的模拟量电信号输入转换为随电信号大小和极性变化、且快速响应的大功率液压能[流量(或)和压力]输出,从而实现对液压执行器位移(或转速)、速度(或角速度)、加速度(或角加速度)和力(或转矩)的控制。
电液伺服阀通常是由电气一机械转换器、液压放大器(先导级阀和功率级主阀)和检测反馈机构组成的(见图2-1)。
图2-1 电液伺服阀的组成2 电气—机械转换器电气—机械转换器包括电流—力转换和力—位移转换两个功能。
典型的电气—机械转换器为力马达或力矩马达。
力马达是一种直线运动电气一机械转换器,而力矩马达则是旋转运动的电气—机械转换器。
力马达和力矩马达的功用是将输入的控制电流信号转换为与电流成比例的输出力或力矩,再经弹性组件(弹簧管、弹簧片等)转换为驱动先导级阀运动的直线位移或转角,使先导级阀定位、回零。
通常力马达的输入电流为150~300mA,输出力为3~5N。
力矩马达的输入电流为10~30mA,输出力矩为0.02~0.06N·m。
伺服阀中所用的电气一机械转换器有动圈式和动铁式两种结构。
电液位置伺服控制系统摘要:采用电液比例方向阀,设计了电液位置伺服控制系统,以LABVIEW和MATLAB混合编程实现系统的实时控制功能,以个人计算机为数字控制器,采用NI公司的USB-6008数据采集卡完成数据采集、数据输出控制等多项功能。
针对电液比例位置控制系统的特点,建立数学模型。
对于系统的不稳定性,采用PID控制算法对其进行校正,提高了系统的精度及响应速度。
关键词:LABVIEW,MATLAB,位置控制,PID算法0前言电液位置伺服系统是最基本和最常用的一种液压伺服系统,如机床工作台的位置、板带轧机的板厚、带材跑偏控制、飞机和船舶的舵机控制、雷达和火炮控制系统以及振动试验台等。
在其它物理量的控制系统中,如速度控制和力控制等系统中,也常有位置控制小回路作为大回路中的一个环节电液位置伺服系统主要是用于解决位置跟随的控制问题,其根本任务就是通过执行机构实现被控量对给定量的及时和准确跟踪,并要具有足够的控制精度。
电液伺服系统的动态特性是衡量一套电液伺服系统设计及调试水平的重要指标。
它由电信号处理装置和若干液压元件组成,元件的动态性能相互影响,相互制约及系统本身所包含的非线性,致使其动态性能复杂。
因此,电液伺服控制系统的设计及仿真受到越来越多的重视[1]。
本文以比例方向阀实现对伺服油缸的位置控制,加入位移传感器构成位置闭环控制系统。
采用NI公司的USB-6008数据采集卡完成数据采集、数据输出控制等多项功能,以LABVIEW和MATLAB混合编程实现了良好的实时控制功能。
1系统原理及建模1.1系统组成及原理电液位置伺服控制系统以液体作为动力传输和控制介质,利用电信号进行控制输入和反馈。
只要输入某一规律的输入信号,执行元件就能启动、快速并准确地复现输入量的变化规律。
控制系统结构图如图1所示:图1电液位置伺服控制系统结构图1.2电液位置伺服系统建模本系统的电液比例方向阀为BFW-03-3C2-95-50,通径为10mm ,最高工作压力31.5MPa ,最大流量50l/ min 。