伺服控制(电液伺服系统 )课件
- 格式:pptx
- 大小:791.78 KB
- 文档页数:63
1电液伺服控制系统1.1电液控制系统的发展历史概述液压控制技术的历史最早可以追溯到公元前240年,一位古埃及人发明的液压伺服机构———水钟。
而液压控制技术的快速发展则是在18世纪欧洲工业革命时期,在此期间,许多非常实用的发明涌现出来,多种液压机械装置特别是液压阀得到开发和利用,使液压技术的影响力大增。
18世纪出现了泵、水压机及水压缸等。
19世纪初液压技术取得了一些重大的进展,其中包括采用油作为工作流体及首次用电来驱动方向控制阀等。
第二次世界大战期间及战后,电液技术的发展加快。
出现了两级电液伺服阀、喷嘴挡板元件以及反馈装置等。
20世纪50~60年代则是电液元件和技术发展的高峰期,电液伺服阀控制技术在军事应用中大显身手,特别是在航空航天上的应用。
这些应用最初包括雷达驱动、制导平台驱动及导弹发射架控制等,后来又扩展到导弹的飞行控制、雷达天线的定位、飞机飞行控制系统的增强稳定性、雷达磁控管腔的动态调节以及飞行器的推力矢量控制等。
电液伺服驱动器也被用于空间运载火箭的导航和控制。
电液控制技术在非军事工业上的应用也越来越多,最主要的是机床工业。
在早些时候,数控机床的工作台定位伺服装置中多采用电液系统(通常是液压伺服马达)来代替人工操作,其次是工程机械。
在以后的几十年中,电液控制技术的工业应用又进一步扩展到工业机器人控制、塑料加工、地质和矿藏探测、燃气或蒸汽涡轮控制及可移动设备的自动化等领域。
电液比例控制技术及比例阀在20世纪60年代末70年代初出现。
70年代,随着集成电路的问世及其后微处理器的诞生,基于集成电路的控制电子器件和装置广泛应用于电液控制技术领域。
现代飞机上的操纵系统。
如驼机、助力器、人感系统,发动机与电源系统的恒速与恒频调节,火力系统中的雷达与炮塔的跟踪控制等大都采用了电液伺服控制系统。
飞行器的地面模拟设备,包括飞行模拟台、负载模拟器大功率模拟振动台、大功率材料实验加载等大多采用了电液控制,因此电液伺服控制的发展关系到航空与宇航事业的发展,在其他的国防工业中如机器人也大量使用了电液控制系统。

电液伺服系统电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。
根据输入信号的形式不同,又可分为模拟伺服系统和数字伺服系统两类。
下面对模拟伺服系统和数字伺服系统作一简单的说明。
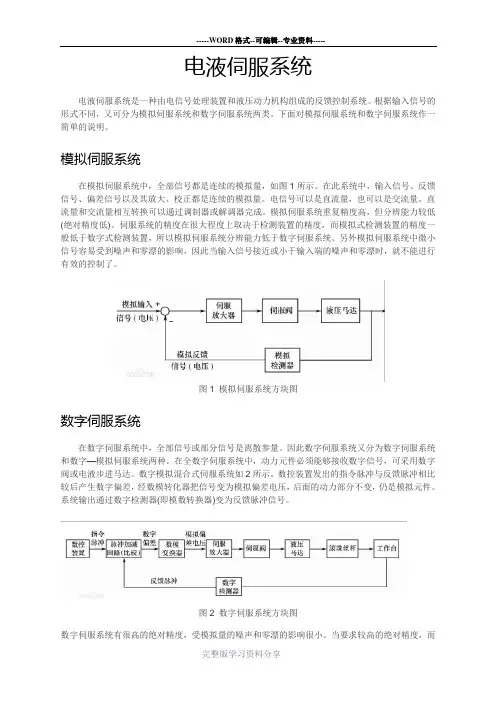
模拟伺服系统在模拟伺服系统中,全部信号都是连续的模拟量,如图1所示。
在此系统中,输入信号、反馈信号、偏差信号以及其放大、校正都是连续的模拟量。
电信号可以是直流量,也可以是交流量。
直流量和交流量相互转换可以通过调制器或解调器完成。
模拟伺服系统重复精度高,但分辨能力较低(绝对精度低)。
伺服系统的精度在很大程度上取决于检测装置的精度,而模拟式检测装置的精度一般低于数字式检测装置,所以模拟伺服系统分辨能力低于数字伺服系统。
另外模拟伺服系统中微小信号容易受到噪声和零漂的影响,因此当输入信号接近或小于输入端的噪声和零漂时,就不能进行有效的控制了。
图1 模拟伺服系统方块图数字伺服系统在数字伺服系统中,全部信号或部分信号是离散参量。
因此数字伺服系统又分为数字伺服系统和数字—模拟伺服系统两种。
在全数字伺服系统中,动力元件必须能够接收数字信号,可采用数字阀或电液步进马达。
数字模拟混合式伺服系统如2所示。
数控装置发出的指令脉冲与反馈脉冲相比较后产生数字偏差,经数模转化器把信号变为模拟偏差电压,后面的动力部分不变,仍是模拟元件。
系统输出通过数字检测器(即模数转换器)变为反馈脉冲信号。
图2 数字伺服系统方块图数字伺服系统有很高的绝对精度,受模拟量的噪声和零漂的影响很小。
当要求较高的绝对精度,而不是重复精度时,常采用数字模拟系统。
从经济性可靠性方面来看,简单的伺服系统采用采用模拟型控制为宜。
系统特点及使用场合电液伺服系统综合了电气和液压两方面的优点,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量的反馈等优点。
因此,在负载质量大又要求响应速度快的场合最为适合,其应用已遍及国民经济的各个领域,比如飞机与船舶舵机的控制、雷达与火炮的控制、机床工作台的位置控制、板带轧机的板厚控制、电炉冶炼的电极位置控制、各种飞机车里的模拟台的控制、发电机转速的控制、材料试验机及其他实验机的压力控制等等。