平面机构的类型
- 格式:pptx
- 大小:2.51 MB
- 文档页数:49
教案纸新课讲述第一节平面连杆机构的基本类型及应用四、滑块机构除了上述三种铰链四杆机构外,在工程实际中还广泛应用着其他形式的四杆机构,其中的绝大多数都可以看作是由铰链四杆机构演化而来的。
1. 曲柄滑块机构图5-9a 所示为一曲柄摇杆机构。
摇杆上的C 点的轨迹是以D 为圆心,以CD 为半径的圆弧mn 。
若将摇杆CD 的长度增加至无穷大,转动副 D 将移至无穷远处,则转动副 C 的轨迹mn 将变成一直线。
构件3 与4 之间的转动副D 将转化成移动副,该机构演化为曲柄滑块机构(图5-9b)。
在该图中,滑块上的转动副中心 C 的移动轨迹mn 不通过曲柄的回转中心A ,该机构称为偏置曲柄滑块机构。
曲柄回转中心 A 到mn 的垂直距离称为偏距,以e 表示。
当e =O ,即直线mn 通过曲柄的回转中心 A 时,该机构称为对心曲柄滑块机构(图5-9c),简称曲柄滑块机构。
它广泛地应用于活塞式内燃机、空气压缩机以及冲床等机械设备中。
2. 转动导杆机构和摆动导杆机构若将图5-10a 中的构件1取为机架,如图5-10b 和5-10c 所示,当 a <b 时构件2 和 4 分别绕固定轴B 和A 作整周转动。
该机构称为转动导杆机构。
图5-11a 所示的插床主体机构中的机构ABC 就是转动导杆机构。
当a >b 时,导杆 4 只能绕转动副 A 相对于机架1作往复摆动,故该机构称为摆动导杆机构。
图5-11b 所示的牛头刨床主体机构中的机构ABC 即是摆动导杆机教案纸新课讲述构的应用实例。
3. 曲柄摇块机构和移动导杆机构若将图5-10a 中的构件2 取为机架,如图5-10d所示,则滑块3 只能是绕固定轴 C 作往复摆动的摇块,故该机构称为曲柄摇块机构。
图5-12 所示的汽车自动卸料机构就是曲柄摇块机构。
若将图5-10a 中的3 作为机架,如图5-10e 所示,则导杆只能在固定滑块 3 中往复移动,故该机构称为移动导杆机构。
平面机构的结构分析
平面机构是一种由多个连接体组成的机械结构,可以用来传递力和运动。
平面机构通常由连杆、转动副和滑动副组成,可以用来实现直线运动、旋转运动等。
在平面机构中,连杆是连接各个连接体的基本元素,它们可以是刚性的,也可以是柔性的。
转动副和滑动副则是连接连杆的关节,用来传递运动或者力的。
转动副能够使连杆产生相对转动运动,滑动副则能使连杆产生相对滑动运动。
根据不同的传动方式,平面机构可以分为平行四杆机构、串联四杆机构、曲柄摇杆机构等。
平行四杆机构由四个长度相等、平行的连杆组成,可以实现直线运动。
串联四杆机构则由多个连杆相互连接组成,可以使得最后一个连杆产生复杂的轨迹运动。
曲柄摇杆机构由一个转动副和一个滑动副组成,可以实现旋转运动。
在设计和分析平面机构时,需要考虑到各个连接体之间的角度关系、长度关系以及运动规律。
通过运用静力学、运动学和动力学等原理,可以对平面机构进行有效地分析和设计,来确定各个连接体之间的关系和运动规律,以实现所需的运动或者力传递。
总之,平面机构是一种重要的机械结构,通过对其结构和运动规律的分析,可以有效地实现力和运动的传递,被广泛应用于各种机械设备和工程中。
平面四杆机构的类型特点及应用概念平行四杆机构的特点是固定杆和活动杆平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动,适用于汽车悬挂系统、工艺机械等领域。
正交四杆机构的特点是固定杆和活动杆相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于推动机械、绞车等领域。
菱形四杆机构的特点是固定杆和活动杆两两相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动和旋转运动,适用于啮合机构、制造机械等领域。
推动机构的特点是固定杆和活动杆两两平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于传动机构、物料输送机械等领域。
平面四杆机构的应用非常广泛。
它可以用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。
在制造机械中,平面四杆机构常用于构建精密机床,如铣床、钻床等。
在工艺机械中,平面四杆机构常用于构建织机、纺机等。
在汽车悬挂系统中,平面四杆机构可以实现汽车悬挂系统的运动,提高汽车悬挂性能。
在绞车中,平面四杆机构可以用于提升和绞丝等工作。
在传动机构中,平面四杆机构可以用于实现直线传动和转动传动。
在物料输送机械中,平面四杆机构可以用于实现物料的输送和分拨。
总之,平面四杆机构具有多种类型和特点,适用于多个领域的应用。
它可以实现复杂的运动轨迹,广泛应用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。
平面四杆机构是一种常见的机械结构,由四个连杆组成,可以实现转动和传递力量。
根据其连杆排列方式和运动特点,平面四杆机构可以分为以下几种基本类型:
四杆平行机构:四个连杆平行排列的机构,常见的形式是平行四边形。
四杆平行机构具有简单结构和稳定性好的特点,在工程和机械设计中广泛应用。
四杆平行滑块机构:四个连杆中有一个是滑块,可以在平面内作直线运动。
这种机构常见的应用是在平面上实现直线运动,如印刷机的工作台。
四杆旋转机构:四个连杆可以围绕一个固定点旋转,形成一个封闭的轨迹。
这种机构常见的形式是摇杆机构或曲柄摇杆机构,常用于发动机的活塞运动转化为旋转运动。
四杆转动滑块机构:四个连杆中有一个是滑块,可以在平面内作转动运动。
这种机构常见的应用是实现旋转运动和直线运动的转换,如某些机床的进给机构。
这些基本类型的平面四杆机构都具有不同的运动特点和应用场景。
根据具体的工程需求和设计要求,可以选择合适的平面四杆机构类型,并进行优化和改进,以满足特定的运动和力学要求。

平面连杆机构的基本形式平面连杆机构是一种常见的机械传动装置,由连接在同一平面上的连杆组成。
它具有简单、紧凑的结构,广泛应用于各种机械设备中。
平面连杆机构的基本形式包括三种:曲柄摇杆机构、滑块摇杆机构和滑块曲柄机构。
曲柄摇杆机构是平面连杆机构中最简单的形式之一。
它由一个固定的曲柄和一个连接在曲柄上的摇杆组成。
当曲柄转动时,摇杆会随之摆动。
这种机构常用于泵、压缩机等需要周期性运动的设备中。
滑块摇杆机构是由一个固定的摇杆和一个连接在摇杆上的滑块组成。
当摇杆摆动时,滑块会在固定的轨道上滑动。
这种机构常用于工程机械、飞机起落架等需要复杂运动的设备中。
滑块曲柄机构是由一个固定的滑块和一个连接在滑块上的曲柄组成。
当曲柄转动时,滑块会在固定的轨道上滑动。
这种机构常用于发动机、内燃机等需要往复运动的设备中。
平面连杆机构的基本原理是利用连杆的运动来实现机械装置的工作。
在这些机构中,曲柄是主要的运动构件,通过转动曲柄,摇杆或滑块可以实现不同的运动方式,如旋转、摆动或往复运动。
平面连杆机构的设计需要考虑多个因素,包括连杆的长度、角度和位置等。
根据不同的工作需求,可以通过调整连杆的参数来实现所需的运动方式和速度。
平面连杆机构具有结构简单、可靠性高的优点,但也存在一些局限性。
例如,由于连杆在同一平面上运动,所以只能实现二维的运动,无法实现三维的复杂运动。
此外,由于连杆的长度和角度限制,机构的运动范围也受到一定的限制。
平面连杆机构是一种常见且重要的机械传动装置,具有简单、紧凑的结构。
通过合理设计和调整连杆参数,可以实现不同的运动方式和速度。
在实际应用中,我们可以根据具体的需求选择适合的平面连杆机构,以满足机械装置的工作要求。
简述平面四杆机构的类型特点和应用一、平面四杆机构的类型:1. 平衡四杆机构:该机构有能力保持平衡,即使受到外部干扰也能够回到原来的位置。
这种机构被广泛用于稳定系统和开放环境。
2. 驱动四杆机构:该机构可以转化旋转运动为线性运动或反之。
这种机构广泛应用于机械工程、模具制造和自动化工程中。
3. 可逆四杆机构:该机构可以逆向工作,在不同的任务中灵活应用。
这种机构被广泛用于机器人工程和自动化工程中。
4. 变位四杆机构:该机构可以在不同位置自动调整,以适应不同的应用需求。
这种机构被广泛用于自动化机械和精密制造领域。
二、平面四杆机构的特点:1. 平面四杆机构可以转换不同类型的运动,包括旋转、线性、摆动等。
2. 平面四杆机构结构简单,易于制造和维护,具有良好的可靠性和稳定性。
3. 平面四杆机构可以通过组装多个单元来实现更高级别的机械结构,例如机器人、自动化系统等。
4. 平面四杆机构广泛应用于机械、汽车、制造、物流、自动化等领域,并逐渐成为机器人、智能装备的重要组成部分。
三、平面四杆机构的应用:1. 发动机连杆机构:由于发动机需要将旋转运动转化为线性运动来驱动汽车轮胎,平面四杆机构被广泛应用于汽车发动机的连杆机构中。
2. 物流设备:平面四杆机构可以逆向工作,可以将线性运动转化为旋转运动,这使得物流设备可以保持高速和精度,如自动包装线、调料机等。
3. 机械手:平面四杆机构的结构简单,稳定性好,这使得它成为机器人手臂的优选部件之一,广泛应用于各个制造领域。
4. 印刷机械:平衡四杆机构可以使印刷平台始终稳定,特别是在高速印刷时,它可以保持印刷品的精度和质量。
5. 飞控系统:平衡四杆机构被广泛应用于飞控系统的调节器中,以帮助控制飞行器的稳定性。
总的来说,平面四杆机构具有结构简单、稳定性好、运动特性多样等特点,可以在各个行业发挥重要的作用。
平面机构知识点总结一、定义平面机构是由连接在一起的刚性杆件和连接件组成的机械系统,它们在一个平面内进行相对运动。
平面机构可以通过不同的构造形式实现不同的运动功能,例如传递运动、转换运动、控制运动等。
平面机构的构造形式和动力学特性在机械设计中起着非常重要的作用,因此对其进行深入了解和研究对于工程师和设计师来说是非常重要的。
二、分类根据平面机构的结构特点和运动形式,可以将其分为不同的类型,主要包括以下几种:1.四连杆机构:由四根连杆和四个铰链连接而成的机构,可以实现平行四边形连杆的运动形式,常见的四连杆机构包括平行四边形机构和梯形机构等。
2.曲柄滑块机构:由曲柄、连杆、滑块等部件构成的机构,可以实现曲柄的旋转运动和滑块的直线往复运动,广泛应用在发动机、压力机、注塑机等领域。
3.齿轮机构:由齿轮、齿条、链条等传动件构成的机构,可以实现不同速度比和转矩比的传动,常见的齿轮机构包括行星齿轮机构、直动齿轮机构等。
4.摇杆机构:由摇杆、铰链和固定点连接而成的机构,可以实现摇杆的往复摆动运动,广泛应用在摇摇椅、铣床、钻床等机械装备中。
三、结构特点平面机构具有以下几个结构特点:1.刚性连接:平面机构的连接件和杆件都是由高强度的材料制成,能够保证机构在运动过程中的稳定性和可靠性。
2.铰链连接:平面机构中的连接件通常使用铰链连接,可以实现相对旋转和相对平移运动,能够满足不同的运动需求。
3.多样性:平面机构在结构形式上非常多样化,可以通过不同的连杆和连接方式实现多种不同的运动形式,适用于不同的工程需求。
四、运动分析平面机构的运动分析是研究机构在运动过程中的速度、加速度、位移等动力学特性的过程。
平面机构的运动分析通常包括以下几个方面:1.位移分析:通过分析机构中各个零件的相对位移关系,可以获得机构在运动过程中的位移规律和轨迹形式。
2.速度分析:通过对机构中各个零件的相对速度进行分析,可以获得机构在不同运动状态下的速度大小和方向。
平面四杆机构的三种基本类型判断标准(一)平面四杆机构的三种基本类型判断标准引言平面四杆机构是一种常见的机械结构,广泛应用于机械工程领域。
它由四个连杆组成,能够实现不同的运动,并具有一定的机械优势。
本文将介绍平面四杆机构的三种基本类型判断标准,帮助读者更好地理解和应用这一机械结构。
1. 条件1:连杆数目平面四杆机构的第一个判断条件是连杆数目。
根据连杆数量的不同,平面四杆机构可以分为以下三种基本类型:•4杆1驱动:由一个驱动连杆和三个被动连杆组成,驱动连杆通过轴承或摩擦连接到驱动装置上。
这种类型的机构常用于基本的传动和夹持功能。
•3杆1驱动:由一个驱动连杆和两个被动连杆组成,驱动连杆通过轴承或摩擦连接到驱动装置上。
这种类型的机构在工程领域应用广泛,能够实现特定的运动轨迹和力学优势。
•2杆2驱动:由两个驱动连杆和两个被动连杆组成,每个驱动连杆都通过轴承或摩擦连接到驱动装置上。
这种类型的机构可实现复杂的运动,例如平移和旋转的组合。
2. 条件2:连杆长度比较平面四杆机构的第二个判断条件是连杆长度的比较。
通过比较不同连杆的长度,可以判断机构是否为平面四杆机构。
这里有两种情况:•互为相反数:连杆的长度之比为-1。
若连杆的长度满足这个条件,则可以判断该机构为平面四杆机构。
•乘积为1:连杆的长度之比为1。
若连杆的长度满足这个条件,则可以判断该机构为平面四杆机构。
3. 条件3:杆件连接方式平面四杆机构的第三个判断条件是杆件连接方式。
根据连杆连接方式的不同,可以判断机构是否为平面四杆机构。
这里有两种情况:•直接连接:连杆之间直接连接,形成闭合的杆件结构。
这种连接方式常见于平面四杆机构中。
•间接连接:连杆之间通过其他杆件或连接件连接。
如果连杆之间具有间接连接的情况,则不能判断该机构为平面四杆机构。
结论在判断平面四杆机构的类型时,我们可以从连杆数目、连杆长度比较和杆件连接方式三个方面入手。
通过对这三个判断标准的分析,可以准确判断出平面四杆机构的类型。
平面连杆机构的三种基本形式
平面连杆机构是机械工程中常见的一种机构形式,用于实现直线运动和转动运动的转换。
根据连杆的排列方式和连接方式的不同,平面连杆机构可以分为三种基本形式:四杆机构、单杆机构和双杆机构。
四杆机构是最常见的一种平面连杆机构形式。
它由四个连杆组成,其中两个是固定的,两个是活动的。
四杆机构可以实现复杂的运动,常用于各种机械装置中。
四杆机构中的连杆可以根据其长度和连接方式的不同,实现不同的运动形式。
常见的四杆机构有平行四杆机构、菲利普机构和斯特拉·劳恩机构等。
单杆机构是由一个连杆和一个固定点组成的机构形式。
单杆机构可以实现简单的直线运动,常用于各种简单的机械装置中。
单杆机构的特点是结构简单,运动稳定,适用于一些只需要简单直线运动的装置。
常见的单杆机构有滑块机构、摇杆机构和曲柄机构等。
双杆机构是由两个连杆和一个固定点组成的机构形式。
双杆机构可以实现复杂的运动,常用于各种需要转动运动和直线运动转换的装置中。
双杆机构的特点是结构简单,运动灵活,适用于一些需要复杂运动的装置。
常见的双杆机构有曲柄滑块机构、摇杆滑块机构和平行双杆机构等。
总结起来,平面连杆机构是机械工程中常见的一种机构形式,用于
实现直线运动和转动运动的转换。
根据连杆的排列方式和连接方式的不同,平面连杆机构可以分为四杆机构、单杆机构和双杆机构三种基本形式。
这三种形式分别适用于不同的工程需求,具有各自的特点和优势。
在机械设计中,我们可以根据实际需求选择合适的平面连杆机构形式,以实现所需的运动方式。
平面机构的组成
平面机构是机械工程中常见的一种机构类型,它由多个构件组成。
平面机构通常由以下几个基本构件组成:
1. 连杆:连杆是平面机构中最基本的构件,它是由刚性材料
制成的直线构件。
连杆在机构中起到连接其他构件的作用,使得机构能够完成所要求的运动。
2. 节点:节点是连杆相互连接的位置,也是支点或铰链的位置。
通过改变节点的位置可以实现不同的运动。
3. 连杆连接点:连杆连接点是指连杆与其他构件连接的位置。
连接点可以是固定点,也可以是可移动连接点。
根据不同的要求,连接点可以是直接连接或者通过连接件连接。
4. 连接件:连接件是连接连杆和其他构件的构件,它通常由
螺栓、螺母、销等组成,用于固定和连接连杆和其他构件。
5. 驱动件:驱动件是平面机构中提供运动能源的构件,它可
以是电机、气缸、液压等驱动装置。
驱动件通过转动或者其他方式提供动力,使得整个机构能够进行运动。
以上是平面机构常见的构成部分,根据具体的机构类型和应用要求,还可以包括其他构件,如支撑件、导轨、轴承等。
平面机构的构成可以根据需要进行设计和优化,以满足具体的运动要求和工作条件。
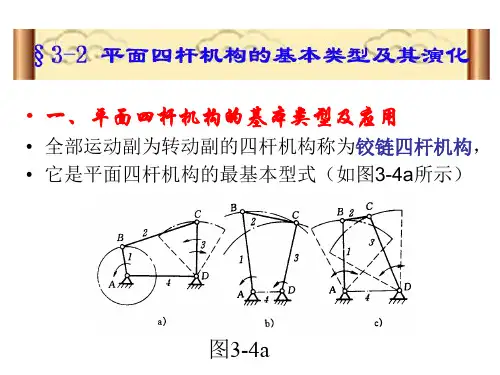
平面四杆机构的基本类型及应用
平面四杆机构是机械设计中常用的连杆机构之一,由于其简单可靠和使用方便,广泛应用于各种机械设备中。
平面四杆机构是由四个链杆组成的,其中至少有一个链杆是固定的。
四个链杆的联接点构成了四个运动副,包括一对转动副和一对平动副,它们通过固定的连杆来互相联系。
平面四杆机构可以实现转动或直线运动,同时可实现正、反、重复运动。
本文将主要介绍平面四杆机构的基本类型及应用。
1. 凸轮机构型平面四杆机构
凸轮机构型平面四杆机构是一种基于凸轮的平面四杆机构,由于其能够产生不同形状的凸轮运动来实现转动或直线运动,因此在机械设备中广泛应用。
例如,凸轮式压力机、凸轮式磨床、凸轮式切削机和凸轮式卷板机等机器均采用了凸轮机构型平面四杆机构。
双曲线机构型平面四杆机构是一种基于双曲线运动的平面四杆机构,由于其具有双曲线重复运动的性质,因此在多运动副平面机构中应用较为广泛。
例如,位移量较小的曲柄滑块机构,就采用了这种结构。
此外,双曲线机构型平面四杆机构还被广泛应用于推动旋转工件的机械系统中。
心轮机构型平面四杆机构是一种基于心轮的平面四杆机构,其构造相比其他机构稍微复杂,但具有较高的可靠性和灵敏度,因此被广泛应用于重要的机械装置中。
例如,用于驱动自动调焦装置、扫描仪输送装置、医院电梯系统等机器的传动装置均采用了心轮机构型平面四杆机构。
总之,平面四杆机构广泛应用于机械设计中的各个领域,包括制造业、食品加工、印刷、医疗和各种运动设备等。
不同类型的平面四杆机构各具特点,可根据使用情况和需要选择。
平面四杆机构的类型,特点及应用概念平面四杆机构是一种重要的机械构件,具有固定点簇、连杆及活动点簇等关键组成部分。
根据不同的连接方式和功能需求,平面四杆机构可以分为平行四杆机构、菱形四杆机构、双曲线四杆机构、半圆四杆机构等多种类型。
下面本文将对这些机构类型的特点及应用进行相关介绍。
一、平行四杆机构平面四杆机构中的平行四杆机构,最为常见。
平行四杆机构由两对等长连杆组成,各自平行滑动,所以叫做平行四杆机构。
平行四杆机构的特点是连接点严格固定,适合转动相同方向的连续运动,如车床上的顶轴和平面磨床的进给机构就采用了平行四杆机构。
二、菱形四杆机构菱形四杆机构是由一对等长的对边固定的菱形和一对等长杆件组成的机构。
其中,两个杆件与菱形的对角线相连,另外两个杆件则与菱形两条平行线相连。
通过这样的联结方式,菱形四杆机构可以实现不同方向的运动,如旋钮开关,废乳机械的减速机构等都采用了菱形四杆机构。
三、双曲线四杆机构双曲线四杆机构是由双曲面、两个相交的固定点、两个关节和两个等长杆组成的平面四杆机构,主要是用来实现一定的负载传递和动力,例如工件阻力和重力等。
双曲线四杆机构的优点在于具有一定的自适应能力,可以自动调整杆长度,达到更稳定的运动效果。
应用领域包括夹持,钻床等。
四、半圆四杆机构半圆四杆机构是由两条半圆弧及两对连杆构成的平面四杆机构。
通过调整连接点的位置及杆长度,可以实现转轴轨迹的变化。
半圆四杆机构在工业生产中被广泛应用,如水平挖掘机,转子泵等。
在应用平面四杆机构的过程中,大多数机构的运动往往还需要与其它机构进行配合才能实现更复杂多变的功能。
此外在机器人领域中,四杆机构也得到了广泛应用,如各类机器人的手臂,就是利用四杆机构的特性来完成精细灵活的动作。
总的来说,平面四杆机构是机械领域中一类非常基础且重要的构件。
通过不同的连接方式和调整,可以实现多样化的运动功能,并被广泛应用在工业生产及机器人领域中。
平面连杆机构的基本形式
平面连杆机构是一种常见的机械结构,由多个连杆和固定点组成,用
于将旋转运动转换为直线运动或者将直线运动转换为旋转运动。
平面
连杆机构的基本形式包括四种:曲柄摇杆机构、双曲柄摇杆机构、滑
块机构和凸轮机构。
曲柄摇杆机构是最简单的平面连杆机构之一。
它由一个固定点、两个
连杆和一个曲柄组成。
其中,一个连杆连接着曲柄和固定点,另一个
连杆连接着固定点和工作部件。
当曲柄旋转时,工作部件就会做往复
直线运动。
这种结构广泛应用于内燃机等设备中。
双曲柄摇杆机构则是由两个相交的连接臂组成的平面连杆机构。
它可
以将圆周运动转换为直线运动,并且能够实现不同幅值和相位的输出。
这种结构常用于制造振荡器等设备。
滑块机构由一条滑块、两个连接臂和一个固定点组成。
当滑块沿着一
条直线移动时,连接臂也会沿着另一条直线做相应的运动。
这种结构
广泛应用于起重机、升降机等设备中。
凸轮机构则是由一个凸轮和一个连接臂组成的平面连杆机构。
当凸轮
旋转时,连接臂会做往复直线运动。
这种结构常用于制造发动机、液
压泵等设备。
总之,平面连杆机构是一种非常重要的机械结构,广泛应用于各种设备中。
了解其基本形式对于设计和制造具有重要意义。