平面机构自由度计算及结构分析
- 格式:docx
- 大小:3.96 MB
- 文档页数:20
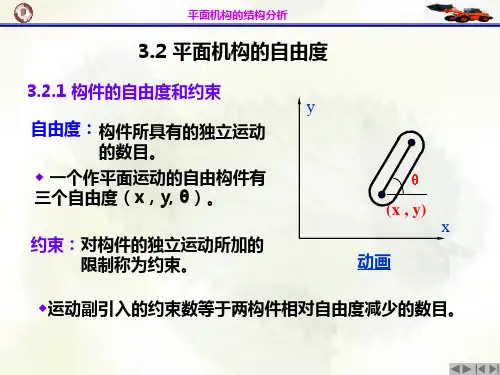
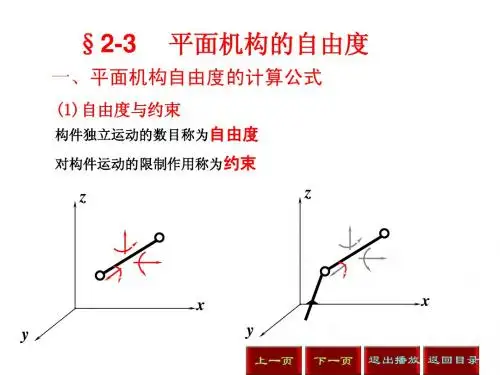
平面机构的自由度与运动分析一、平面机构的自由度平面机构是指机构中的构件只能在一个平面内运动的机构,它由多个连接杆、转动副和滑动副组成。
平面机构的自由度是指机构中能够独立变换位置的最小的连接杆数目,也可以理解为机构中独立的变量的数量。
对于平面机构,其自由度可以通过以下公式计算:自由度=3n-2j-h其中,n表示连接杆的数量,j表示驱动链的数量,h表示外部约束的数量。
根据上述公式可以看出,自由度与平面机构中连接杆的数量和驱动链和外部约束的数量有关。
连接杆的数量越多,机构的自由度就越大,可以实现更复杂的运动。
驱动链的数量越多,机构中的动力驱动器越多,自由度就越小,机构的运动变得更加确定。
外部约束的数量越多,机构中的约束条件就越多,自由度就越小,机构的运动也会变得更加确定。
二、平面机构的运动分析1.闭合链和链架分析:首先需要确定机构中的闭合链和链架,闭合链是指机构中连接杆形成一个封闭的回路,闭合链中的连接杆数目应该为n 或n-1,n是机构中的连接杆数量。
链架是指机构中的连接杆形成一个开放的链路。
通过分析闭合链和链架中的链接关系和约束条件,可以确定机构中构件的位置和运动方式。
2.位置和速度分析:根据机构的连接杆的长度和角度,可以通过几何方法或代数方法确定机构中构件的位置和速度分量。
通过分析连接杆的长度和角度的变化规律,可以推导出机构中构件的位置和速度随时间的变化关系。
3.加速度和动力学分析:根据机构中各个构件的位置和速度,可以通过几何方法或动力学方法计算构件的加速度和动力学特性。
通过分析机构中构件的加速度和动力学特性,可以确定机构中构件的运动稳定性和质量分布。
4.动力分析:对于需要携带负载或进行力学传动的机构,需要进行动力学分析,确定机构中各个构件的受力和承载能力。
通过分析机构中构件的受力情况,可以确定机构的设计参数和强度要求。
总结起来,平面机构的自由度与运动分析是确定机构中构件位置和运动状态的重要方法,通过分析机构中的闭合链和链架、构件的位置和速度、加速度和动力学特性,可以确定机构的运动方式和特性,为机构的设计和优化提供依据。
平面机构自由度计算及结构分析在机械工程领域,平面机构是由一系列连接件和铰链组成的机械系统,在平面内进行运动。
平面机构的自由度指的是机构能够独立移动的自由度数量。
自由度的计算及结构分析是设计和优化机构的重要环节,下面将详细介绍平面机构自由度的计算及结构分析方法。
1.平面机构自由度计算的基本原理平面机构中常见的连接件包括滑动副、铰链副和齿轮副等。
根据这些连接件的类型和数量,可以确定机构的格式方程。
例如,如果机构中有n个滑动副,则格式方程的数量为2n,因为每个滑动副有两个约束方程(平移约束和转动约束)。
同样地,如果机构中有m个铰链副,则格式方程的数量为m。
确定格式方程后,我们需要计算机构的独立运动方程数量。
独立运动方程描述了机构中各连接件之间的相对运动关系。
对于平面机构,独立运动方程的数量等于机构中的自由度数量。
通过求解格式方程和独立运动方程,我们可以得到平面机构的总约束方程数量。
然后,通过公式自由度=3n-总约束方程数量,可以计算机构的自由度数量。
2.平面机构自由度计算方法(1)基于迎接方式的计算方法这是一种基本的自由度计算方法,其思想是通过分析机构中两个相邻部件之间的约束关系来计算自由度数量。
首先,确定机构的基本框架,并标记出机构的连杆、滑块等部件。
然后,根据机构的连杆相邻部件之间的连接方式和铰链类型,确定相邻部件之间的约束关系。
对于滑块,如果其只能实现平移运动,则约束数量为2;如果可以实现平移和转动,则约束数量为3、类似地,对于连杆,如果只能实现转动运动,则约束数量为1;如果可以实现平移和转动,则约束数量为2在计算约束数量时,需要注意对于普通铰链,其约束数量为2;对于直线铰链,其约束数量为1;对于齿轮铰链,其约束数量为0。
通过统计各部件之间的约束数量,可以得到机构的自由度数量。
(2)利用虚位移法的计算方法虚位移法是一种准确且广泛应用的方法,用于计算机构的自由度数量。
这种方法基于贝努利-克洛福特定理,即机构中任意一点的虚位移应符合约束条件。
机械设计之平面机构自由度计算在机械设计中,平面机构是由几个刚性杆件和连接件组成的,用于转换或传递力、运动或位置的机器系统。
而平面机构的自由度是指机构中独立移动的自由度数量。
平面机构的自由度可以通过格里ュ布勒定理(Gruebler's criterion)来计算。
该定理表明平面机构的自由度等于总的刚接触约束数量减去约束其中一杆件上的铰链滑块轴承约束数量的总和,再减去总的铰链滑块轴承约束数量。
在计算平面机构的自由度时,首先需要明确机构的结构以及刚性杆件和连接件的数量。
然后,分别确定机构中的铰链、滑块和轴承的位置以及相互之间的约束。
接下来,需要计算总的刚接触约束数量。
刚接触约束是指通常由铰链、滑块和轴承组成的约束,可以通过刚性杆件和连接件之间的连接点来确定。
这些约束限制了杆件和连接件的相对运动。
然后,计算约束其中一杆件上的铰链滑块轴承约束数量的总和。
这些约束是指仅约束其中一杆件上的铰链、滑块和轴承约束。
通过计算这些约束的数量,可以得出约束其中一杆件上的铰链滑块轴承约束数量的总和。
最后,将总的刚接触约束数量减去约束其中一杆件上的铰链滑块轴承约束数量的总和,再减去总的铰链滑块轴承约束数量,即可得到平面机构的自由度数量。
需要注意的是,平面机构的自由度仅仅是指机构中独立移动的自由度数量,并不包括相对于机构整体移动的自由度。
例如,如果机构的一个铰链用于固定整个机构的位置,那么该铰链并不会增加机构的自由度。
总结起来,平面机构的自由度可以通过格里ュ布勒定理来计算。
计算过程包括确定机构中的铰链、滑块和轴承的位置以及相互之间的约束,计算总的刚接触约束数量,计算约束其中一杆件上的铰链滑块轴承约束数量的总和,计算总的铰链滑块轴承约束数量,最后将这些数量带入格里ュ布勒定理中计算得出平面机构的自由度数量。


平面机构自由度计算及结构分析
一、平面机构结构分析(15分)
1.计算图1所示机构的自由度,明确指出其中的复合铰链、局部自由度或虚约束;(7分)
2. 画出该机构图示瞬时除去虚约束后的低副替代机构示意图;(3分)
3. 取与机构自由度数相同且做定轴转动的连架杆为原动件,对低副替代机构进行结构分析。
要求画出机构拆分后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(5分)
1.计算图1所示机构的自由度,明确指出其中的复合铰链、局部自由度或虚约束;
解:n=8,P L =11,P H =1,F= 3n-2P L -P H =3⨯8-2⨯11-1=1(4分)
3. 答案一:凸轮为原动件,每个组1分,三级机构(1分)
答案二:以右边的两个联架杆之一为原动件:原动件不计分,每个基本组1分,二级机构
(1
图1
虚约束(1分)
复合铰链(1分)
虚约束(1分)
答案三:以左边的联架杆为原动件:每个基本组1分,三级机构(1分)
二、平面机构结构分析(15分)
1.计算图1所示机构的自由度,明确指出其中的复合铰链、局部自由度或虚约束;(7分)
2. 画出该机构图示瞬时除去虚约束后的低副替代机构示意图;(3分)
3. 取与机构自由度数相同且做定轴转动的连架杆为原动件,对低副替代机构进行结构分析。
要求画出机构拆分后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(5分)
图1
Ⅲ级杆组(4个构件6个低副组成)Ⅱ级杆组(2个构件3个低副)。