机械振动二自由度
- 格式:ppt
- 大小:1.67 MB
- 文档页数:29
实验10 二自由度系统的各阶固有频率与主振型一、实验目的1.学会用共振法确定二自由度系统的各阶固有频率。
2.观察二自由度系统的各阶振型。
3.将实验测得的各阶固有频率和振型与理论结果进行比较。
二、实验装置与仪器1.机械振动与控制实验台。
2.磁电式非接触激振器(JZF-1型)。
3.激振信号源(SJF-3型)。
4.重锤两个(1kg 与2kg 各一个),磁性表座,两质量块的钢丝绳一根,螺丝刀。
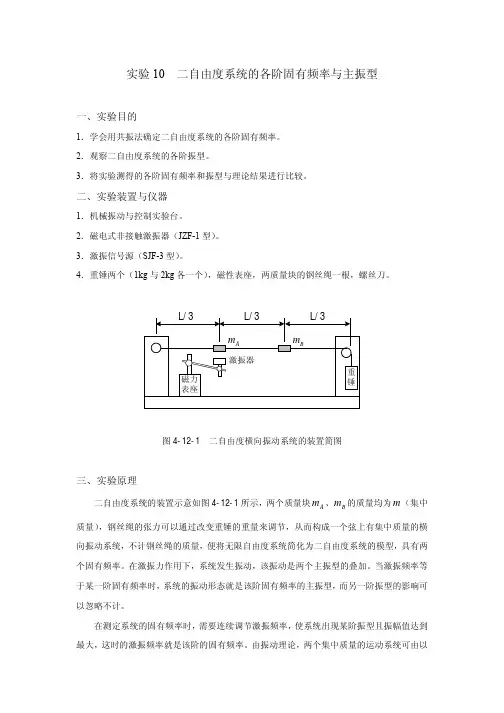
图4-12-1 二自由度横向振动系统的装置简图三、实验原理二自由度系统的装置示意如图4-12-1所示,两个质量块、m 的质量均为m (集中质量),钢丝绳的张力可以通过改变重锤的重量来调节,从而构成一个弦上有集中质量的横向振动系统,不计钢丝绳的质量,便将无限自由度系统简化为二自由度系统的模型,具有两个固有频率。
在激振力作用下,系统发生振动,该振动是两个主振型的叠加。
当激振频率等于某一阶固有频率时,系统的振动形态就是该阶固有频率的主振型,而另一阶振型的影响可以忽略不计。
A mB 在测定系统的固有频率时,需要连续调节激振频率,使系统出现某阶振型且振幅值达到最大,这时的激振频率就是该阶的固有频率。
由振动理论,两个集中质量的运动系统可由以下方程描述:0=+KX XM &&其中质量矩阵为:mm 00=M 刚度矩阵为:21123/6/3/3/6−−=−−=L T L T L T L T L T K 位移矩阵为:21x x X =系统的一阶固有频率为:mLT 31=ω 或者 mL T f 3π211= 系统的二阶固有频率为:mLT 92=ω 或者 mL T f 9π212= 在以上各式中, =0.0045kg 为集中质量, m T 为弦丝张力(N ), =L 0.625m 为弦丝长度。
各阶主振型分别为()111++=A 以及()112−+=A ,参见图4-12-2。
(a ) (b )图4-12-2 二自由度系统的一阶主振型(a )和二阶主振型(b )四、实验方法1.将磁电式非接触激振器接入激振信号源输出端,把激振器对准其中任一个质量块,保持一定的间隙(8—10mm ),使得振动时激振器与质量块不会发生碰撞。
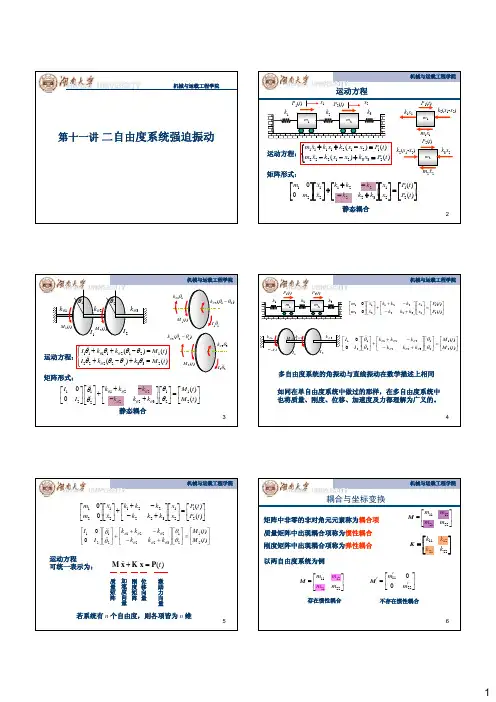
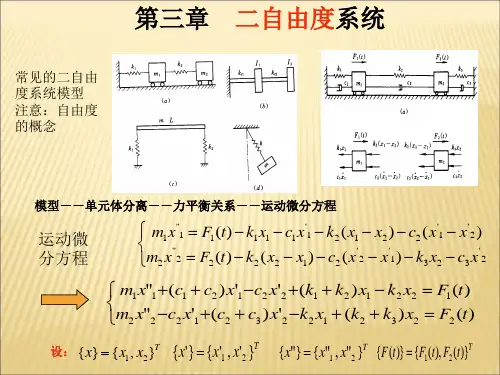
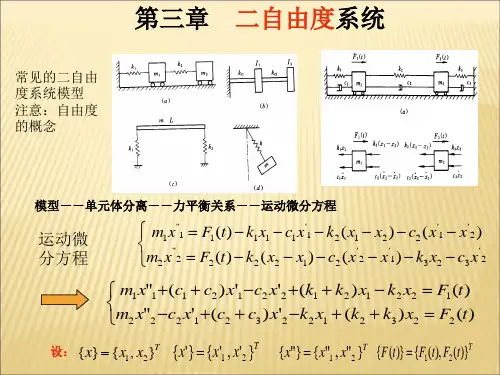
机械与运载工程学院第十一讲二自由度系统强迫振动2机械与运载工程学院运动方程m 1m 2k 3k 1k 2x 1x 2P 1(t )P 2(t )k 1x 1k 2(x 1-x 2)11x m m 1P 2(t )k 2(x 1-x 2)22xm m 2k 3x 2⎩⎨⎧=+−−=−++)()()()(2332122212121111t P x k x x k x m t P x x k x k x m 运动方程:矩阵形式:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+−−++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡)()(0021213222212121t P t P x x k k k k k k x x m m3机械与运载工程学院1θk 1I 2θ2I 2θk 3θk )(1t M )(2t M 1θ11θθk 11θ I )(1t M )(212θθθ−k 22θ I )(2t M 33θθk )(122θθθ−k 1111121212222332()()()()I k k M t I k k M t θθθθθθθθθθθ⎧++−=⎪⎨+−+=⎪⎩运动方程:矩阵形式:122111122322220()0()k k k I M t k k k I M t θθθθθθθθθθ+−⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥−+⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ 4机械与运载工程学院⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+−−++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡)()(0021213222212121t P t Px x k k k k k k x x m m⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+−−++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡)()(0021213222212121t M t M k k k k k k I I θθθθθθθθθθ 多自由度系统的角振动与直线振动在数学描述上相同如同在单自由度系统中做过的那样,在多自由度系统中也将质量、刚度、位移、加速度及力都理解为广义的。

文献综述二自由度振动系统的简单主动控制摘要:为了改善车辆的平顺性,本文建立了车辆的二自由度振动模型。
并阐述了振动主动控制中主要控制方法和策略及应用中存在的问题。
同时,介绍了国内的部分学者对振动主动控制方面的研究。
最后,并对其进行了相应的总结。
关键词:二自由度振动主动控制1引言振动主动控制主要应用主动闭环控制,其基本思想是通过适当的系统状态或输出反馈,产生一定的控制作用来主动改变被控制结构的闭环零、极点配置或结构参数,从而使系统满足预定的动态特性要求。
控制规律的设计几乎涉及到控制理论的所有分支,如极点配置、最优控制、自适应控制、鲁棒控制、智能控制以及遗传算法等。
本材料主要参考了《振动主动控制技术的研究进展》、《基于MATLAB的自整定模糊PID控制系统》等论文的相关方法。
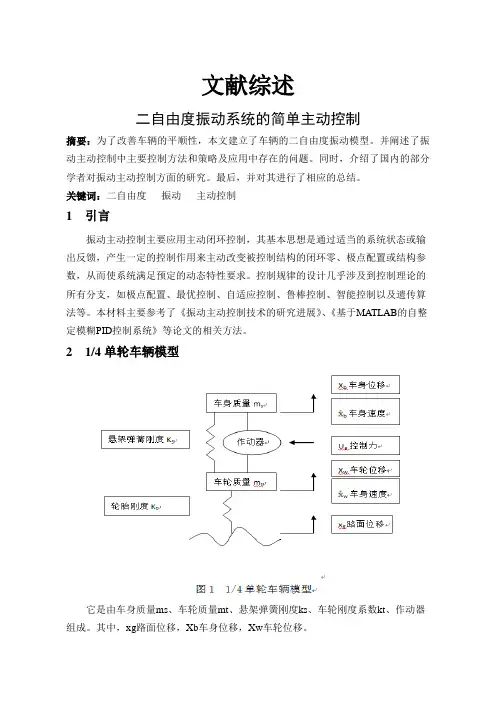
21/4单轮车辆模型它是由车身质量ms、车轮质量mt、悬架弹簧刚度ks、车轮刚度系数kt、作动器组成。
其中,xg路面位移,Xb车身位移,Xw车轮位移。
3控制系统简介3.1独立模态空间法独立模态空间法的基本思想是利用模态坐标变换把整个结构的振动控制转化为对各阶主模态控制,目的在于直接改变结构的特定振型和刚度。
这种方法直观简便,充分利用模态分析技术的特点,但先决条件是被控系统完全可控和可观,且必须预先知道应该控制的特定模态。
3.2极点配置法极点配置法也称特征结构配置,包括特征值配置和特征向量配置两部分。
系统的特征值决定系统的动态特性,特征向量影响系统的稳定性。
根据对被控系统动态品质的要求,确定系统的特征值与特征向量的分布,通过反馈或输出反馈来改变极点位置,从而实现规定要求。
3.3最优控制最优控制方法就是利用极值原理、最优滤波或动态规划等最优化方法来求解结构振动最优控制输入的一种设计方法。
由于最优控制规律是建立在系统理想数学模型基础之上的,而实际结构控制中往往采用降阶模型且存在多种约束条件,因此基于最优控制规律设计的控制器作用于实际的受控结构时,大都只能实现次最优控制。
机械振动大作业姓名:徐强学号:SX1302106专业:航空宇航推进理论与工程能源与动力学院2013年12月简支梁的振动特性分析题目:针对简支梁、分别用单、双、三、十个自由度以及连续体模型,计算其固有频率、固有振型。
单、双、三自由度模型要求理论解;十自由度模型要求使用李兹法、霍尔茨法、矩阵迭代法、雅可比法、子空间迭代法求解基频;连续体要求推导理论解,并通过有限元软件进行数值计算。
解答:一、 单自由度简支梁的振动特性如图1,正方形截面(取5mm ×5mm )的简支梁,跨长为l =1m ,质量m 沿杆长均匀分布,将其简化为单自由度模型,忽略阻尼,则运动微分方程为0=+••kx x m ,固有频率ωn =eqeq m k ,其中k 为等效刚度,eq m 为等效质量。
因此,求出上述两项即可知单自由度简支梁的固有频率。
根据材料力学的结果,由于横向载荷F 作用在简支梁中间位置而引起的变形为)(224348EI F -)(x l x x y -=(20l x ≤≤), 48EI F -3max l y =为最大挠度,则: eq k =δF=348EIl 梁本身的最大动能为:)(224348EI F -)(x l x x y -==)(223max43x l lx y -T max =2×dx x y l m l 220)(21⎭⎬⎫⎩⎨⎧•⎰=2max 351721•y m )( 如果用eq m 表示简支梁的质量等效到中间位置时的大小,它的最大动能可表示为:T max =2max21•y m eq所以质量为m 的简支梁,等效到中间位置的全部质量为: m m eq 3517=故单自由度简支梁横向振动的固有频率为:ωn =eqeq m k =3171680ml EImk图1 简支梁的单自由度模型二、 双自由度简支梁的振动特性如图2,将简支梁简化为双自由度模型,仍假设在简支梁中间位置作用载荷,根据对称性,等效质量相等,因此只要求出在3/l 处的等效质量即可。
第五章两自由度系统振动§5-1 概述单自由度系统的振动理论是振动理论的基础。
在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。
研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度的振动系统。
①汽车动力学模型:图3.1两自由度汽车动力学模型§5-2 两自由度系统的自由振动一、系统的运动微分方程②以图3.2的双弹簧质量系统为例。
设弹簧的刚度分别为k 1和k 2,质量为m 1、m 2。
质量的位移分别用x 1和x 2来表示,并以静平衡位置为坐标原点,以向下为正方向。
(分析)在振动过程中的任一瞬间t ,m 1和m 2的位移分别为x 1及x 2。
此时,在质量m 1上作用有弹性恢复力()12211x x k x k -及,在质量m 2上作用有弹性恢复力()122x x k -。
这些力的作用方向如图所示。
应用牛顿运动定律,可建立该系统的振动微分方程式:()()⎭⎬⎫=-+=--+00122221221111x x k x m x x k x k xm (3.1)令2212121,,m k c m k b m k k a ==+=则(3.1)式可改写成如下形式:()()⎭⎬⎫=-+=--+00122221221111x x k x m x x k x k xm⎭⎬⎫=+-=-+00212211cx cx xbx ax x(3.2) 这是一个二阶常系数线性齐次联立微分方程组。
(分析)在第一个方程中包含2bx -项,第二个方程中则包含1cx -项,称为“耦合项”(coupling term )。
这表明,质量m 1除受到弹簧k 1的恢复力的作用外,还受到弹簧 k 2的恢复力的作用。
一、单自由度系统的振动2()()0()(nmx t kx t x t w x t +=⇔+120)cos sin cos n n A w t A w t x =+=2()()()0()2()()0n n mx t cx t kx t x t w x t w x t ξ++=++= 211)(nn w t w t e X e ξξ--=+自然频率 阻尼率 22n c c mw mkξ==w 2()2()(()cos(n n nw td x t w x t w x t t C ew t ξξψ-++=-:尼激0 ()cos(n x t C w t =-幅频曲线及其特性 ()H w 1:此时力与位移相位相反sin nwt c =/2/22T T T -=⎰周期函数将失去周期性,而离散频谱将转化为连续谱,此时傅里()()(mx t cx t kx t ++21)[1(/)n n c k w w ∞==-∑00sin n dx x ξωω+0sin n n x t ωω +自由振动是强迫振动的基础,任一时刻的强迫振动响应其实只是该时刻前被激起的一系列自由振动的叠加。
2()2()()n nx t w x t w x t ξ++=1()()()2iwtt H w F w e dw π+∞-∞=⎰()()()mx t cx t kx t ++=拉普拉斯变换:()(0)(()()()F s mx ms X s D s D s ++=+拉氏反变换:11()[()]2jw jwx t L X s j γγπ+--==⎰牛顿第二定律、定轴转动方程、能量原理、拉格朗日方程一般情况采用解析法求解,对于非线性方程,常采用数值方法求解振动系统反作用力近似为位移和速度的函数:)x 泰勒展开并取cx 结论:弹簧刚度与阻尼系数实际上是泰勒展开式中定义:单位位移所需要的力。
弹簧串联、并联,关键在于共力还是共位移用积分计算结构运动时的动能,得到某结构的等效质量/d m ;经变形法;能量法:max V不变,响应振幅与激振力振幅正比,为滞后激励多少,Ψ初相位微小的阻尼就可以限制振幅的无限扩大共振需要一个较长的建立过程,机器需有足够的加速功率顺利通过共振区。
课程名称:机械振动学授课对象:机械工程专业本科生授课学时:16学时教学目标:1. 理解机械振动的概念、分类及其基本特性;2. 掌握单自由度、两自由度和多自由度系统的振动分析;3. 了解机械振动在工程中的应用及其危害;4. 能够运用振动学原理解决实际振动问题。
教学内容:一、绪论1. 机械振动的定义及分类2. 机械振动的基本特性3. 机械振动学的研究内容二、单自由度系统的振动1. 简谐振动及其表示2. 单自由度系统的自由振动3. 单自由度系统的受迫振动4. 系统的响应分析三、两自由度系统的振动1. 两自由度系统的自由振动2. 两自由度系统的受迫振动3. 系统的响应分析四、多自由度系统的振动1. 多自由度系统的自由振动2. 多自由度系统的受迫振动3. 系统的响应分析五、弹性体的振动1. 弹性体的自由振动2. 弹性体的受迫振动3. 系统的响应分析六、机械振动在工程中的应用1. 机械振动在机械设计中的应用2. 机械振动在结构工程中的应用3. 机械振动在噪声控制中的应用七、机械振动的危害及控制1. 机械振动的危害2. 机械振动的控制方法3. 振动监测与故障诊断教学方法和手段:1. 讲授法:结合实例,深入浅出地讲解机械振动学的基本概念、原理和方法;2. 讨论法:组织学生讨论机械振动在工程中的应用及其危害,培养学生的分析和解决问题的能力;3. 案例分析法:选取典型工程案例,引导学生分析振动问题,提高学生的实际应用能力;4. 多媒体教学:利用PPT、视频等媒体,形象生动地展示振动现象和振动分析方法。
教学进度安排:第1-2学时:绪论第3-4学时:单自由度系统的振动第5-6学时:两自由度系统的振动第7-8学时:多自由度系统的振动第9-10学时:弹性体的振动第11-12学时:机械振动在工程中的应用第13-14学时:机械振动的危害及控制第15-16学时:总结与复习考核方式:1. 平时成绩:占30%,包括课堂表现、作业完成情况等;2. 期中考试:占30%,测试学生对机械振动学基本概念、原理和方法的掌握程度;3. 期末考试:占40%,测试学生对振动学知识的综合运用能力。
第四章两自由度系统的振动当振动系统需要两个独立坐标描述其运动时,称为两自由度振动系统。
两自由度系统是最简单的多自由度系统,因此研究两自由度系统是分析和掌握多自由度系统的基础。
两自由度系统具有两个固有频率,两自由度系统以固有频率进行的振动与单自由度系统不同,它以固有频率进行的振动是指整个系统在运动过程中莫一位移形状,称为固有振型,因此两自由度具有两个与固有频率对应的两个固有振型。
在任意初始条件下的自由振动响应一般由两个固有振型的叠加得到。
受迫简谐振动的频率与激励频率相同。
两自由度系统的振动微分方程一般由两个联立的微分方程组成。
如果恰当地选取坐标,可使两个微分方程解除耦合,这种坐标称为主坐标或固有坐标。
用固有坐标建立的系统振动微分方程为两个独立的单自由度系统的微分方程。
4.1系统的自由振动如图所示的无阻尼两质量-弹簧系统,可沿光滑水平面滑动的两个质量与分别用弹簧与连至定点,并用弹簧相互连接。
三个弹簧的轴线沿同一水平线,质量与只限于沿着该直线进行往复运动。
这样与的任一瞬时的位置只需用坐标与就可以完全确定,因此该系统具有两个自由度。
图两自由度系统的振动取与的静平衡位置为坐标原点。
在振动过程中任一瞬时t,与的位置分别为与,作用于与的重力于光滑水平面的法向反力相平衡,在质量的水平方向作用有弹性恢复力和,质量的水平方向则受到和作用,方向如图所示。
取加速度和力的正方向与坐标正方向一致,根据牛顿运动定律有移项得方程()就是图所示的两自由度系统自由振动的微分方程,为二阶常系数线性齐次常微分方程组。
方程()可以使用矩阵形式来表示,写成由系数矩阵组成的常数矩阵m和k分别称为质量矩阵和刚度矩阵,向量x 称为位移向量。
因此设分别为刚度矩阵k中的元素,因而方程()可以写成方程()为系统自由振动的微分方程。
方程()是齐次的,如果和位方程()的一个解,那么与其相差一个因子的和也将是一个解。
通常感兴趣的是一种特殊形式的解,也就是和同步运动的解。