二自由度机械臂MATLAB仿真中期答辩
- 格式:pptx
- 大小:338.10 KB
- 文档页数:9
机电系统的动力与运动的计算机仿真-----------基于二自由度两连杆平面机器人系统仿真马国锋梁应海周凯(武汉理工大学机电工程学院机械工程及自动化系)摘要:平面两连杆机器人(机械臂)是一种简单的两自由度的机械装置,其具有一定的复杂动力特性,对其的简单研究能够对机电系统和机器人有更好的学习了解和认识。
利用matlab仿真的快捷,简洁,以及可视化操作可以使其研究更方便,以及利用PID调节,使系统具有更好的时间响应性能。
关键词:matlab仿真PID控制调节平面机器人伺服直流电动机Abstract:The Planar two-link robot (Robot Arm) is a simple mechanical device of two degreesof freedom, it has complex dynamic characteristics. We can gain better learning and understandingfor Mechanical and Electrical systems and Robots only through studying it simply! Using thesuperior performance of MATLAB ,we can make the research more convenient ,besides ,we alsocan make the system have better performance in Time Response through the PID correction.0、引言随着科学技术的发展,利用计算机对控制系统进行仿真和分析,是研究控制系统的重要方法。
对控制系统进行仿真,首先应该建立系统模型,然后根据系统模型进行仿真,并充分的利用计算机作为工具进行数值求解。
Matlab是目前应用最为广泛的仿真语言之一。
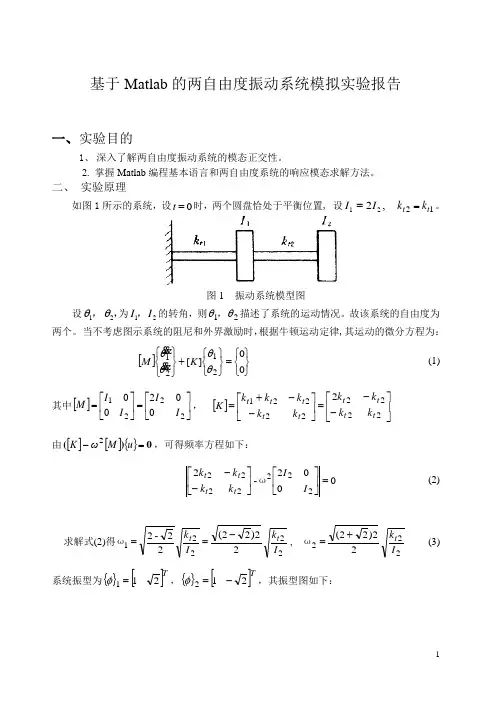
基于Matlab 的两自由度振动系统模拟实验报告一、 实验目的1、 深入了解两自由度振动系统的模态正交性。
2. 掌握Matlab 编程基本语言和两自由度系统的响应模态求解方法。
二、 实验原理如图1所示的系统,设0=t 时,两个圆盘恰处于平衡位置, 设,221I I =2t t k k =。
图1 振动系统模型图设,,21θθ为21I I ,的转角,则21θθ,描述了系统的运动情况。
故该系统的自由度为两个。
当不考虑图示系统的阻尼和外界激励时,根据牛顿运动定律,其运动的微分方程为:[]⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧00][2121θθθθK M(1)其中[]⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=222100200I I I I M ,]⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--+=2222222212t t t t t t t t t k k k k k k k k k K 由[][]{}0)(=-u M ωK 2,可得频率方程如下:0002-22222222=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--I I k k k k t t t t ω (2)求解式(2)得2222122)22(22-2I k I k t t -==ω, 22222)22(I k t +=ω (3)系统振型为{}[]T 211=φ,{}[]T 212-=φ,其振型图如下:图2 系统振型图令{}{}⎥⎦⎤⎢⎣⎡-==Φ2211],[][21φφ, 则 ⎥⎦⎤⎢⎣⎡=ΦΦ10014][][][2I M T, ⎥⎥⎦⎤⎢⎢⎣⎡=ΦΦ22212004][][][ωωI K T (4)式(4)为振动系统的模态正交特性。
当考虑图1系统的外界激励时,即{}t F F F ωsin 21⎭⎬⎫⎩⎨⎧=时,其运动的微分方程为: []t F F K M ωθθθθsin ][212121⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧ (5)为了求出方程(5)的稳态解,可令⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ,将⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ代入式(5),同时方程两边同乘以T ][Φ,并利用振动系统的模态正交特性,有t I F F I F F q q qq ωωωsin )4/()2()4/()2(0022122121222121⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-+=⎭⎬⎫⎩⎨⎧⎥⎥⎦⎤⎢⎢⎣⎡+⎭⎬⎫⎩⎨⎧(6)利用式(6)很容易求得t I F F I F F q q Tωωωωωsin ))4/()2(,)4/()2((22222122122121---+=⎭⎬⎫⎩⎨⎧, 再由⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ求得⎭⎬⎫⎩⎨⎧21θθ。
任务书设计题目:基于MATLAB的机器人柔性手臂控制系统设计与仿真1.设计的主要任务及目标学生应通过本次毕业设计,综合运用所学过的基础理论知识,在深入了解反馈控制系统工作原理的基础上,掌握机械系统建模、分析及校正环节设计的基本过程;初步掌握运用MATLAB/Simulink相关模块进行控制系统设计与仿真的方法,为学生在毕业后从事机械控制系统设计工作打好基础。
2.设计的基本要求和内容(1)根据已有的机器人柔性手臂系统相关资料,对其结构特点及工作原理进行分析;(2)建立柔性手臂系统的数学模型;(3)应用极点配置对系统进行状态反馈设计;(4)运用MATLAB/SIMULINK对系统进行仿真计算;(5)通过动态仿真设计优化系统参数,对反馈系数K进行确定;3.主要参考文献[1] 刘白燕等编,机电系统动态仿真-基于MATLAB/SIMULINK[M].北京:机械工业出版社,2005.7[2] 王积伟,吴振顺等著,控制工程基础[M].北京:高等教育出版社2001.8[3] (日)末松良一. 机械控制入门[M].北京:科学出版社,2000[4] 徐昕等著. MATLAB工具箱应用指南.北京:电子工业出版社,2000 4.进度安排基于MATLAB的机器人柔性手臂控制系统设计与仿真摘要:机械臂未来的发展趋势是高速、高精度和轻型化、操作灵活的柔性机械臂。
柔性机械臂系统的动力学特点是大范围刚体运动的同时,伴随着柔性臂杆的小幅弹性运动。
柔性臂杆的弹性振动将极大地影响机械臂末端的定位精度。
本设计结合机器人柔性手臂的结构特点,对机器人柔性手臂进行了受力分析,建立了柔性手臂系统的集中参数模型。
对柔性手臂系统的特性、系统的可控制性和可观测性进行了分析,用极点配置求取状态反馈系数K对系统进行反馈。
使柔性手臂系统的振动快速达到稳态,用MATLAB仿真确认控制效果。
关键词:柔性机械臂,控制系统,MATLAB仿真Design and simulation system for flexible manipulator control basedon MATLABAbstract:The trend of the development of mechanical arm is high speed, high precision and light-duty, flexible operation of the flexible manipulator. The dynamics of flexible manipulator system is characterized by a wide range of rigid motion at the same time, with flexible arm slightly elastic movement. The elastic vibration of flexible arm will greatly influence the mechanical arm at the ends of the positioning accuracy. This design with the structure characteristics of a flexible robot arm, has carried on the stress analysis of flexible robot arms, established the lumped parameter model of the flexible arm system. Characteristics of the flexible arm system, system controllability and observability are analyzed, using pole assignment for state feedback coefficient K to feedback system. To make the vibration of the flexible arm system to reach steady state quickly, MATLAB simulation confirm the control effect.Key words:Flexible manipulator, Control system, MATLAB simulation目录1概述 (1)1.1引言 (1)1.2研究目的及意义 (2)1.3国内外柔性机械臂的研究现状 (3)1.3.1柔性臂动力学建模的研究现状 (3)1.3.2柔性机械臂的主动控制 (4)2柔性手臂的建模过程 (5)2.1柔性手臂对机器人的重要性 (5)2.2柔性手臂的试验模型 (6)2.3状态方程的建立 (8)2.3.1集中参数模型 (8)2.3.2系统参数和变量的定义 (8)2.3.3数学模型 (10)3系统的特性分析 (13)3.1实验参数 (13)3.2比例变换 (14)3.3系统矩阵的特征值和手臂的振型 (15)3.4可控制性和可观测性 (20)4用极点配置法进行设计和仿真 (22)4.1状态反馈设计 (22)4.2控制系统设计方法选择 (22)4.3利用仿真确认控制效果 (24)5控制系统的实现 (26)总结 (27)参考文献 (29)致谢 (30)附录 (31)1 概述1.1 引言随着人类科技水平的不断进步,机器人的应用越来越广泛。
二自由度机械臂matlab二自由度机械臂是一种常见的工业机器人,它由两个旋转关节组成,可以在水平和垂直方向上进行运动。
在工业自动化领域,二自由度机械臂被广泛应用于装配线上的零部件处理、焊接、涂装等工作。
在本文中,我们将探讨如何利用Matlab对二自由度机械臂进行建模和控制。
我们需要建立二自由度机械臂的数学模型。
通过分析机械臂的结构,可以得到其运动学和动力学方程。
运动学方程描述了机械臂末端的位置和姿态与关节角度之间的关系,而动力学方程则描述了机械臂关节的运动和扭矩之间的关系。
利用Matlab可以方便地求解这些方程,从而实现对机械臂运动的仿真和控制。
接下来,我们可以利用Matlab进行机械臂的控制设计。
控制设计的目标是使机械臂能够按照预先设定的轨迹进行运动,并实现精准的定位和操作。
常见的控制方法包括PID控制、模糊控制和神经网络控制等。
在Matlab中,可以通过编写控制算法来实现对机械臂的闭环控制,从而提高其运动的精度和稳定性。
除了控制设计,Matlab还可以用于机械臂的路径规划和优化。
路径规划是指在给定约束条件下,寻找机械臂末端的最佳运动轨迹,以实现高效的操作。
而优化算法可以帮助机械臂在复杂环境中选择最优的路径,避免碰撞和提高效率。
通过Matlab的强大计算能力,可以快速地求解路径规划和优化问题,为机械臂的运动提供有效的支持。
二自由度机械臂的建模和控制是一个复杂而又具有挑战性的问题。
利用Matlab作为工具,可以方便地对机械臂进行仿真、控制设计、路径规划和优化,从而提高机械臂的运动性能和工作效率。
未来随着人工智能和机器学习的发展,二自由度机械臂的应用将会更加广泛,Matlab将继续发挥重要的作用,推动机械臂技术的发展和应用。
利用MATLAB仿真分析二自由度跟随伺服系统
施文济
【期刊名称】《自动化仪表》
【年(卷),期】2005(026)009
【摘要】利用MATLAB提供的强大计算功能和丰富的数据处理及绘图工具,对二自由度跟随伺服系统在不同的工作条件下(如不同的增益、转动惯量、阻尼特性等)进行系统的动、静态特性仿真分析,从而使系统的优化设计变得方便、简洁.
【总页数】3页(P29-30,33)
【作者】施文济
【作者单位】浙江水利水电专科学校,杭州,310016
【正文语种】中文
【中图分类】TP3
【相关文献】
1.利用Matlab/Simulink的轮式汽车制动过程仿真分析 [J], 朱为国;刘峰
2.基于MATLAB的阀控缸伺服系统仿真分析 [J], 任杉;李玮;韩青
3.基于MATLAB的电液位置伺服系统仿真分析 [J], 王勇亮;卢颖;潘春萍;梁建民
4.基于MATLAB的液压伺服系统位置控制仿真分析 [J], 刘锐
5.基于MATLAB的液压伺服系统位置控制仿真分析 [J], 刘锐
因版权原因,仅展示原文概要,查看原文内容请购买。
二自由度机械臂控制系统的设计与实现的开题报告一、题目二自由度机械臂控制系统的设计与实现。
二、研究背景随着现代工业的发展,机械臂在制造业和物流领域得到广泛应用。
因此,机械臂控制系统的研究和开发具有重要的现实意义。
目前,机械臂的控制方式主要有基于传统PID控制和基于机器学习的控制方式。
而在二自由度机械臂控制系统的设计和实现中,通常会采用传统PID控制方式。
三、研究目的与意义本文旨在设计和实现一套二自由度机械臂控制系统,以便更好地理解和掌握机械臂控制方面的知识,也为制造业和物流领域提供更好的机械臂控制系统方案。
四、研究内容1、二自由度机械臂的建模和仿真。
2、采用传统PID控制方式设计机械臂控制器。
3、采用ROS框架搭建机械臂控制系统。
4、控制系统测试与实验。
五、研究方法1、使用Matlab software建模和仿真二自由度机械臂。
2、采用传统PID控制方式,使用Matlab software设计控制器。
3、使用ROS框架,编写控制程序,搭建机械臂控制系统。
4、进行实验测试,对系统进行调试和优化。
六、研究进度安排1、建模和仿真二自由度机械臂及PID控制器的设计:1个月。
2、ROS框架搭建机械臂控制系统和编写控制程序:2个月。
3、实验测试、调试和优化系统:1个月。
4、论文撰写和答辩:1个月。
七、参考文献[1] 蒋永忠, 梁发才, 李广真. ROS系统在机械臂控制中的应用研究[J]. 物理学报, 2019, 68(8): 080508.[2] 叶海涛, 郭东生, 李修涛. 基于PID控制的多自由度机械臂运动控制研究[J]. 现代电子技术, 2016, 39(12): 92-95.[3] 刘娜. 机械臂运动控制与仿真[D].东华大学, 2016.[4] W. Yu, L. J. Young, W. J. Zhang et al. Sliding mode control for the 2-DOF direct-drive robot arm with uncertainties and disturbances [J]. Robotics and Autonomous Systems, 2016, 82: 139-147.。

二自由度机械臂matlab二自由度机械臂是一种重要的工业机器人,它由两个旋转关节组成,可以完成简单的抓取和定位任务。
在进行机械臂的控制和运动分析时,我们可以使用Matlab 软件,它提供了强大的数学计算和图形界面,可以帮助我们快速构建模型和进行仿真。
首先,我们需要建立机械臂的运动学模型,包括关节尺寸、连杆长度等参数。
这些参数可以通过实际测量或理论计算得到。
然后,我们可以使用正运动学方法计算机械臂的末端坐标,也就是机械臂的位置和姿态。
正运动学模型可以表示为:T_{0n} = T_{01} T_{12} ... T_{n-1n}其中,T_{0n}表示机械臂的末端坐标,T_{ij}表示从第i个关节到第j个关节的变换矩阵。
关节的运动可以通过设置关节角度来实现,这些角度可以通过编程或手动输入。
接下来,我们可以使用逆运动学方法计算机械臂的关节角度,也就是根据末端坐标计算关节角度。
逆运动学模型可以通过解析法、数值法、优化法等多种方法得到。
解析法是最常用的方法,它可以得到解析解,但是只适用于特定的机械臂结构。
数值法和优化法可以得到数值解,适用于复杂的机械臂结构。
在Matlab中,我们可以使用symbolic toolbox来实现解析求解,也可以使用数值库和优化函数来实现数值求解。
例如,我们可以使用fsolve函数来求解非线性方程组,使用fmincon函数来进行优化问题的求解。
最后,我们可以对机械臂进行动力学分析,包括关节扭矩、惯性矩、作用力等。
动力学分析可以根据机械臂的运动学模型和质量参数得到。
在Matlab中,我们可以使用Simulink工具箱来进行动力学分析和控制设计。
总之,Matlab是一种非常有用的工具,可以帮助我们进行机械臂的建模、控制和分析。
通过Matlab,我们可以更加深入地了解机械臂的运动规律和机理,从而为机械臂的应用和设计提供重要的支持。
二自由度机械臂实验报告实验报告课程名称: 机电系统建模与控制实验项目名称: 二自由度机械臂实验****: **组别:第6组成员:刘仕杰.胡据林.王昊阳.于骁实验日期:2019年12月9日一、实验简介二自由度(DOF)串联柔性(2DSFJ)机械臂包括两个用于驱动谐波齿轮箱(零回转间隙)的直流电机及一个双杆串联机构()。
两个连接都是刚性的。
主连接通过一个柔性关节耦合到第一个驱动器上,在其端部载有第二个谐波驱动器,该驱动器通过另一个柔性关节与第二个刚性连接耦合。
两个电机及两个柔性关节都装有正交光学编码器。
每一个柔性关节配有两个可更换的弹簧。
使用一个翼形螺钉零件,就可沿着支撑杆,将每根弹簧端移到所希望的不同定位点。
该系统可视为多种手臂式机器人机构的高度近似,是典型的多输入多输入(MIMO)系统。
二、实验内容1. 系统开环时域动态特性和频域特性分析;2. 应用极点配置方法设计控制器,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变极点分布位置,完成至少 2 组不同闭环参数性能对比;3. 应用 LQR 方法设计反馈控制律,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变 Q 和 R 的值,完成至少 2 组不同闭环参数性能对比;4. 设计全阶状态观测器,完成物理 PSF 与状态观测(至少两组观测器极点位置)综合作用下的系统性能控制。
三、实验设备1.设备构造与线路图(1)直流电机#1第一台直流电机为一台可在最高27V 下工作的Maxon273759 精密刷电机(90 瓦)。
该电机可提供 3A 的峰值电流,最大连续电流为 1.2A。
注意:施用在电机上的高频信号会对电机刷造成最终损坏。
产生高频噪音的最可能来源是微分反馈。
如果微分增益过高,噪音电压会被输入到电机里。
为保护您的电机,请将您的信号频带限制控制在 50Hz以内。
(2)谐波传动器#1谐波驱动器#1 使用谐波传动器LLC 生产的CS-14-100-1U-CC-SP 谐波减速箱。
二自由度机械臂matlab二自由度机械臂是一种常见的工业机器人,它通常由两个旋转关节组成,可以在水平平面内进行运动。
在工业自动化领域,二自由度机械臂被广泛应用于装配、焊接、搬运等任务中,其简单结构和灵活性使其成为生产线上的重要角色。
在工程设计中,使用Matlab对二自由度机械臂进行建模和控制是一种常见的方法。
Matlab是一种功能强大的数学建模软件,可以帮助工程师们快速准确地分析和设计机械系统。
通过Matlab,工程师可以轻松地对机械臂的运动学和动力学特性进行建模,并设计出高效稳定的控制算法。
建立二自由度机械臂的数学模型是Matlab中的关键步骤。
首先,工程师需要确定机械臂的几何参数,包括关节长度、关节角度范围等。
然后,利用正运动学和逆运动学方程,工程师可以计算出机械臂末端的位置和姿态,从而建立起机械臂的运动学模型。
在建立好运动学模型之后,工程师需要进一步分析机械臂的动力学特性。
通过使用Matlab的仿真工具,工程师可以模拟机械臂在不同工况下的运动轨迹和力学特性,帮助他们优化机械臂的设计参数和控制算法。
控制算法是二自由度机械臂设计中的另一个关键点。
在Matlab中,工程师可以编写各种控制算法,如经典的PID控制、模糊控制、神经网络控制等,来实现对机械臂的精准控制。
通过不断调整和优化控制算法,工程师可以使机械臂在各种工况下实现高效稳定的运动。
总的来说,利用Matlab对二自由度机械臂进行建模和控制是一种高效可靠的方法。
Matlab提供了丰富的工具和函数,帮助工程师们快速准确地分析和设计机械系统。
通过不断优化和改进,工程师们可以设计出性能优越的二自由度机械臂,为工业生产带来更高的效率和质量。
机械臂运动分析与仿真建模中期报告指导老师:xx队员:xxx xxxxxx机械臂运动分析与仿真建模项目简介:(1)项目背景工业机器人具有工作效率高、稳定可靠、重复精度好、能在高危环境下作业等优势。
在传统制造业,特别是劳动密集型产业的转型升级中可发挥重要作用。
随着机器人技术研究领域的不断发展,机器人仿真系统成为机器人设计和研究的一个灵活工具,发挥着重要的作用。
虚拟样机技术又称机械系统动态仿真技术,是从分析和解决产品整体性能角度出发,来改进产品设计、提高产品性能的新技术。
ADAMS软件是美国机械动力公司研发的,是世界上应用最广泛、最具权威性的机械系统动力学仿真分析软件,可进行动力学、运动学和静态仿真。
(2)虚拟样机技术的特点(1)模拟试验方案,减少试验次数,从而减少试验经费。
(2)缩短产品投向市场的时间。
(3)经过分析计算,采用优化设计方案,降低原材料成本。
(4)在产品的设计阶段发现潜在问题。
(5)增加产品和工程的可靠性。
项目研究目标及主要内容:(1)理解机械臂的运动规律(2)完成三维软件及仿真软件的学习(3)对机械臂进行符合实际情况的运动学仿真计划任务:(1)小组参与研究机械臂的运动原理,根据自己的理解,将其抽象化(2)得到仿真结果后,可以根据小组讨论出的意见合理改良机械臂的运动方式。
工作思路:项目技术路线:(1)机械臂运动分析,描述对应空间位置(2)机械臂三维建模(3)在ADAMS中仿真(4)调试优化项目阶段进展:平移和旋转坐标系映射及复合变换(1)平移坐标变换设坐标系{B}与{A}的方位一致,但坐标系{B}与坐标系{A}的原点不重合。
相对于坐标系{A},坐标{B}的位置用位置矢量A P描述,如图所示。
设点 P 在坐标系Bo{B}中的位置为,那么可通过矢量相加得到点 P 相对于坐标系{A}的位置矢量,即= +旋转坐标变换设坐标系{B}和坐标系{A}的坐标原点相同,但它们的方位不同,如图所示。
用旋转矩阵描述坐标{B}相对于{A}的方位。
2019.21科学技术创新基于AMESim 的二自由度液压机械臂仿真研究陈彬葛怀国温刚(山东优宝特智能机器人有限公司,山东济南250001)液压驱动技术以其高功率密度,高鲁棒性及高刚度等优势,在工业机械臂乃至整个重型机械操作领域都有着举足轻重的地位[1,2]。
相对于电机驱动方式而言,液压驱动系统存在大量的非线性因素,通过数值化的方式很难对液压系统本身进行精确建模[3,4],因此在实际研发过程中,针对液压系统的优化与改进效率极低。
AMESim (Advanced Modeling Environment for Performance Simulation of Engineering Systems)[5,6]作为专业的液压系统仿真软件,对于液压系统的性能评估具有较高的参考价值。
通常,对于液压系统的评估都采用定值的施载方式,机械系统复杂的动力学特性并没有考虑进去。
采用AMESim 和动力学软件联合仿真的手段[7,8]虽能具有较为直观和精确的求解过程,但软件之间的接口调定及仿真过程中接口数据的传输等容易出现错误,由于液压模型与机械模型分别在不同的软件中创建,模型直接的错误查询也存在较大的难度。
本文针对以上问题,提出了一种完全基于AMESim 仿真软件的可视化建模仿真方法,通过针对2自由度机械臂的仿真实验验证了该方法对于多系统联合仿真的高可靠性和实效性,对于液压乃至电机驱动设备的优化与系统评估具有很好的参考价值。
12-DOFs 机械臂运动学分析本文所设计的二自由度机械臂CAD 模型如图1所示。
其中1为机械臂三维机构图,机械臂的两个旋转关节都有直线油缸驱动;2是机械臂的结构参数示意,其具体数值详见表1。
图1机械臂三维模型及参数根据结构参数可得机械臂的末端坐标(t x ,t z )与关节角(,)相对于基坐标的关系如下:根据上式可得:缸长(,)与关节摆角(,)关系可表述如下:2仿真模型创建对于机械臂而言,精确的末端工位轨迹跟踪是最基本的动态特性需求,因此其整体的液压油路易采用恒压阀控系统,设计的液压比例作动器如图2所示。
二自由度机械臂实验报告实验报告课程名称: 机电系统建模与控制实验项目名称: 二自由度机械臂实验****: **组别:第6组成员:刘仕杰.胡据林.王昊阳.于骁实验日期:2019年12月9日一、实验简介二自由度(DOF)串联柔性(2DSFJ)机械臂包括两个用于驱动谐波齿轮箱(零回转间隙)的直流电机及一个双杆串联机构()。
两个连接都是刚性的。
主连接通过一个柔性关节耦合到第一个驱动器上,在其端部载有第二个谐波驱动器,该驱动器通过另一个柔性关节与第二个刚性连接耦合。
两个电机及两个柔性关节都装有正交光学编码器。
每一个柔性关节配有两个可更换的弹簧。
使用一个翼形螺钉零件,就可沿着支撑杆,将每根弹簧端移到所希望的不同定位点。
该系统可视为多种手臂式机器人机构的高度近似,是典型的多输入多输入(MIMO)系统。
二、实验内容1. 系统开环时域动态特性和频域特性分析;2. 应用极点配置方法设计控制器,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变极点分布位置,完成至少 2 组不同闭环参数性能对比;3. 应用 LQR 方法设计反馈控制律,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变 Q 和 R 的值,完成至少 2 组不同闭环参数性能对比;4. 设计全阶状态观测器,完成物理 PSF 与状态观测(至少两组观测器极点位置)综合作用下的系统性能控制。
三、实验设备1.设备构造与线路图(1)直流电机#1第一台直流电机为一台可在最高27V 下工作的Maxon273759 精密刷电机(90 瓦)。
该电机可提供 3A 的峰值电流,最大连续电流为 1.2A。
注意:施用在电机上的高频信号会对电机刷造成最终损坏。
产生高频噪音的最可能来源是微分反馈。
如果微分增益过高,噪音电压会被输入到电机里。
为保护您的电机,请将您的信号频带限制控制在 50Hz以内。
(2)谐波传动器#1谐波驱动器#1 使用谐波传动器LLC 生产的CS-14-100-1U-CC-SP 谐波减速箱。
邮局订阅号:82-946360元/年技术创新博士论坛《PLC 技术应用200例》您的论文得到两院院士关注基于ADAMS 和MATLAB 的机械臂控制仿真The two degrees of freedom manipulator control simulation based on ADAMS and MATLAB(河北大学)宗晓萍李月月ZONG Xiao-ping LI Yue-yue摘要:运用多体系统动力学分析软件ADAMS 建立虚拟模型,运用MATLAB 建立控制方案,对虚拟模型进行控制,将两者结合起来对二自由度机械臂关节角度进行控制,结果表明ADAMS 和MATLAB 的联合控制是直观而有效的。
关键词:ADAMS;MATLAB;机械臂;联合控制中图分类号:TP15文献标识码:BAbstract:Employing multi -body systematic dynamic analysis software ADAMS to create a virtual model,and employing MATLAB software to establish the control of the virtual model,with the combination of the two above,it is to control the robot arm joint an -gles of the two degrees of freedom manipulator.The results show that the joint control by ADAMS and MATLAB is intuitive and ef -fective.Key words:ADAMS;MATLAB;manipulator;Joint control文章编号:1008-0570(2009)12-2-0029-021引言ADAMS 软件为用户提供了强大的建模、仿真环境,使用户能够对各种机械系统进行建模、仿真和分析,但是对于控制系统设计,ADAMS 软件提供的控制工具箱不够强大,而MATLAB 中的Simulink 模块具有强大的控制功能,能够帮助用户构建控制模型,如果将两者结合起来使用,充分发挥它们各自的优势,不仅可以直观的观察到目标的运动过程,而且可以建立复杂的控制方案,为机械系统研究提供便利。