转速传感器简介演示文稿
- 格式:ppt
- 大小:5.51 MB
- 文档页数:71
转速传感器原理
转速传感器是一种用于检测机械设备旋转转速的传感器。
其主要工作原理是通过感应设备旋转时产生的信号变化来实现测量。
转速传感器通常采用磁性感应原理。
传感器内部通常包含一种磁性元件,如磁铁或磁盘,并且与旋转设备相连。
当设备旋转时,磁性元件也会随之旋转。
传感器内部还配备了一个特殊的传感器部件,通常是霍尔传感器或感应线圈。
这些传感器部件可以感应到磁性元件的旋转,从而产生与转速相关的电信号。
具体来说,当磁性元件旋转时,它会在传感器部件上产生磁场变化。
霍尔传感器通过检测磁场变化来产生电信号,而感应线圈则通过感应到磁场变化来产生涡流。
通过测量电信号或涡流的频率,可以推算出旋转设备的转速。
这是因为旋转速度越快,磁性元件旋转所引起的磁场变化频率就越高。
转速传感器对于许多设备和行业来说都是非常重要的。
它们被广泛应用于汽车行业、航空航天领域、工业生产中等需要对设备旋转情况进行监测和控制的场合。
转速传感器的原理
转速传感器是一种测量旋转物体转速的设备。
其原理能够通过测量旋转物体上的某一特定点的运动来确定转速大小。
转速传感器常用的原理有磁敏原件原理、霍尔元件原理和光电元件原理等。
其中,磁敏原件原理是通过转子上的多极磁铁和传感器上的磁敏电阻相互作用,产生电信号来测量转速。
当转子旋转时,磁场的变化使得磁敏电阻的阻值发生变化,从而产生与转速相关的电信号。
霍尔元件原理则是利用霍尔效应,通过测量转子磁铁磁场的变化来判断转速大小。
当转子旋转时,磁铁会经过霍尔元件,从而改变霍尔元件的电磁特性,进而产生电信号,从而测量出转速。
光电元件原理是通过传感器上的发光二极管和光敏二极管之间的光信号来测量转速。
转子上带有透明或有反光深浅变化的标志物,当旋转时标志物会使光线被遮挡或透过,从而改变光敏二极管的接收光强,从而产生与转速相关的电信号。
综上所述,转速传感器通过不同的原理来测量旋转物体的转速,并将转速信息转化为电信号进行输出,以满足各类设备对转速监测的需求。
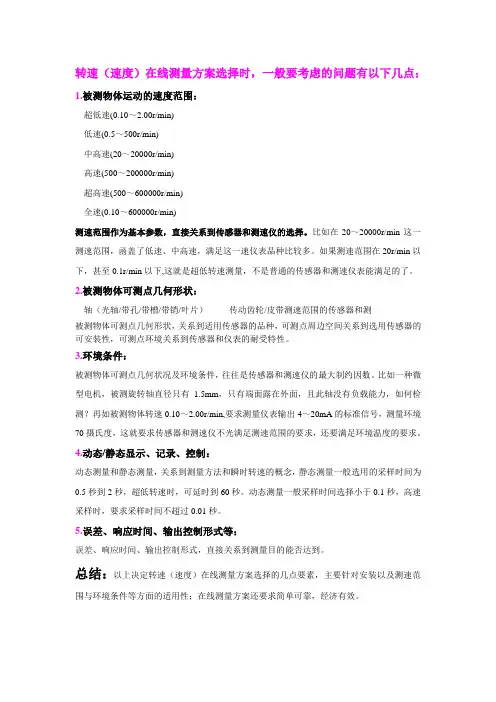
转速(速度)在线测量方案选择时,一般要考虑的问题有以下几点:1.被测物体运动的速度范围:超低速(0.10~2.00r/min)低速(0.5~500r/min)中高速(20~20000r/min)高速(500~200000r/min)超高速(500~600000r/min)全速(0.10~600000r/min)测速范围作为基本参数,直接关系到传感器和测速仪的选择。
比如在20~20000r/min这一测速范围,函盖了低速、中高速,满足这一速仪表品种比较多。
如果测速范围在20r/min以下,甚至0.1r/min以下,这就是超低转速测量,不是普通的传感器和测速仪表能满足的了。
2.被测物体可测点几何形状:轴(光轴/带孔/带槽/带销/叶片)传动齿轮/皮带测速范围的传感器和测被测物体可测点几何形状,关系到适用传感器的品种,可测点周边空间关系到选用传感器的可安装性,可测点环境关系到传感器和仪表的耐受特性。
3.环境条件:被测物体可测点几何状况及环境条件,往往是传感器和测速仪的最大制约因数。
比如一种微型电机,被测旋转轴直径只有 1.5mm,只有端面露在外面,且此轴没有负载能力,如何检测?再如被测物体转速0.10~2.00r/min,要求测量仪表输出4~20mA的标准信号,测量环境70摄氏度,这就要求传感器和测速仪不光满足测速范围的要求,还要满足环境温度的要求。
4.动态/静态显示、记录、控制:动态测量和静态测量,关系到测量方法和瞬时转速的概念,静态测量一般选用的采样时间为0.5秒到2秒,超低转速时,可延时到60秒。
动态测量一般采样时间选择小于0.1秒,高速采样时,要求采样时间不超过0.01秒。
5.误差、响应时间、输出控制形式等:误差、响应时间、输出控制形式,直接关系到测量目的能否达到。
总结:以上决定转速(速度)在线测量方案选择的几点要素,主要针对安装以及测速范围与环境条件等方面的适用性;在线测量方案还要求简单可靠,经济有效。
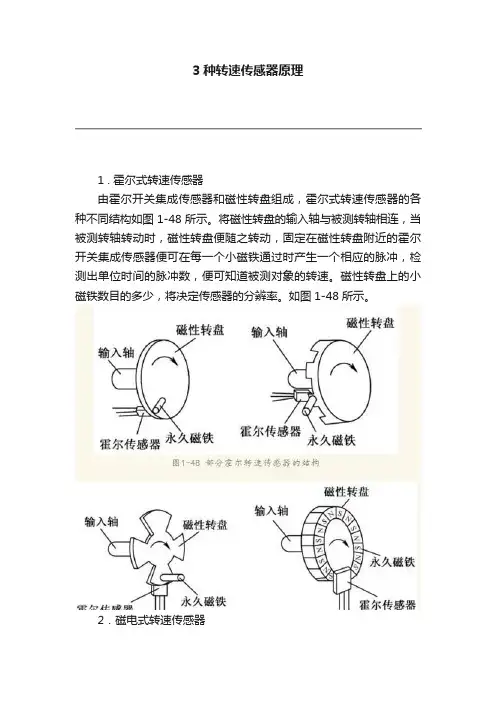
3种转速传感器原理1 . 霍尔式转速传感器由霍尔开关集成传感器和磁性转盘组成,霍尔式转速传感器的各种不同结构如图 1-48 所示。
将磁性转盘的输入轴与被测转轴相连,当被测转轴转动时,磁性转盘便随之转动,固定在磁性转盘附近的霍尔开关集成传感器便可在每一个小磁铁通过时产生一个相应的脉冲,检测出单位时间的脉冲数,便可知道被测对象的转速。
磁性转盘上的小磁铁数目的多少,将决定传感器的分辨率。
如图1-48所示。
2.磁电式转速传感器磁电式转速传感器的结构如图 1-49 所示。
它是由永久磁铁、线圈、磁盘等组成。
在磁盘上加工有齿形凸起,磁盘装在被测转轴上,与转轴一起旋转。
当转轴旋转时,磁盘的凹凸齿形将引起磁盘与永久磁铁间气隙大小的变化,从而使永久磁铁组成的磁路中磁通量随之发生变化。
有磁路通过的感应线圈,当磁通量发生突变时,会感应出一定幅度的脉冲电势,其频率为:3.光电式转速传感器常见的光电式转速传感器有直射式和反射式两种。
直射式输入轴与待测轴相接,光通过开孔圆盘和缝隙板照射在光敏元件上。
开孔盘旋转一周,光敏元件接受光的次数等于盘上的开孔数。
若开孔数为m,记录过程时间为t秒,总脉冲数为N,则转速为:反射型的光电传感器如图1-50所示。
其前端部分采用光纤封装,适应微小物体,特别是微小旋转体的测量。
由于传感器内装有光源(LED)、感光元件(光电晶体管)以及放大器等,所以体积设计得很小,使用方便。
光源是经过频率调制的,所以抗干扰性强,还有状态显示,可供用户测量时确认工作状态。
振荡回路用来产生一个调制频率来点亮光源发光二极管,采用不稳定多谐振荡方式,振荡频率约为7kHz,脉宽约25μs。
从光源发射出来的脉冲光,经过被检测物体的反射,被传感器的光电晶体管所接受,然后经过交流放大器,被放大到适当的电平后,进行检波和积分,再转换成直流电压信号。
然后是波形整形,与一定的直流电压相比较,高于此值,输出为Hi,低于此值,输出为Lo。
状态指示灯也是,输出高电平Hi时,LED点亮,输出低电平Lo时,LED不亮,以作为状态确认用。
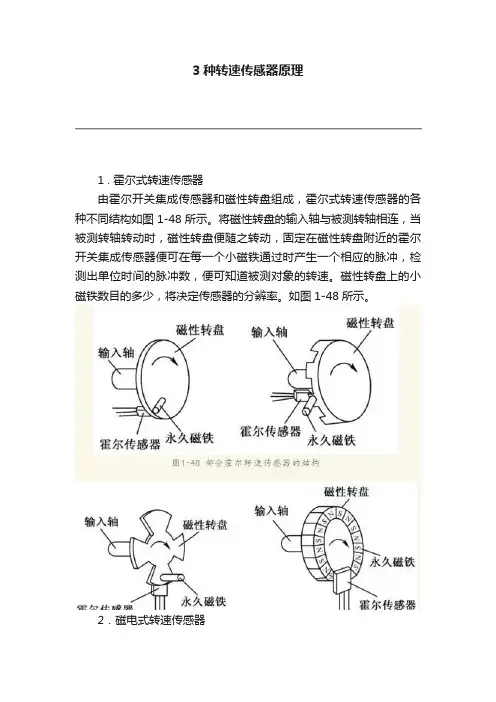
3种转速传感器原理1 . 霍尔式转速传感器由霍尔开关集成传感器和磁性转盘组成,霍尔式转速传感器的各种不同结构如图 1-48 所示。
将磁性转盘的输入轴与被测转轴相连,当被测转轴转动时,磁性转盘便随之转动,固定在磁性转盘附近的霍尔开关集成传感器便可在每一个小磁铁通过时产生一个相应的脉冲,检测出单位时间的脉冲数,便可知道被测对象的转速。
磁性转盘上的小磁铁数目的多少,将决定传感器的分辨率。
如图1-48所示。
2.磁电式转速传感器磁电式转速传感器的结构如图 1-49 所示。
它是由永久磁铁、线圈、磁盘等组成。
在磁盘上加工有齿形凸起,磁盘装在被测转轴上,与转轴一起旋转。
当转轴旋转时,磁盘的凹凸齿形将引起磁盘与永久磁铁间气隙大小的变化,从而使永久磁铁组成的磁路中磁通量随之发生变化。
有磁路通过的感应线圈,当磁通量发生突变时,会感应出一定幅度的脉冲电势,其频率为:3.光电式转速传感器常见的光电式转速传感器有直射式和反射式两种。
直射式输入轴与待测轴相接,光通过开孔圆盘和缝隙板照射在光敏元件上。
开孔盘旋转一周,光敏元件接受光的次数等于盘上的开孔数。
若开孔数为m,记录过程时间为t秒,总脉冲数为N,则转速为:反射型的光电传感器如图1-50所示。
其前端部分采用光纤封装,适应微小物体,特别是微小旋转体的测量。
由于传感器内装有光源(LED)、感光元件(光电晶体管)以及放大器等,所以体积设计得很小,使用方便。
光源是经过频率调制的,所以抗干扰性强,还有状态显示,可供用户测量时确认工作状态。
振荡回路用来产生一个调制频率来点亮光源发光二极管,采用不稳定多谐振荡方式,振荡频率约为7kHz,脉宽约25μs。
从光源发射出来的脉冲光,经过被检测物体的反射,被传感器的光电晶体管所接受,然后经过交流放大器,被放大到适当的电平后,进行检波和积分,再转换成直流电压信号。
然后是波形整形,与一定的直流电压相比较,高于此值,输出为Hi,低于此值,输出为Lo。
状态指示灯也是,输出高电平Hi时,LED点亮,输出低电平Lo时,LED不亮,以作为状态确认用。