扶梯电气控制部分
- 格式:doc
- 大小:1.04 MB
- 文档页数:18

自动扶梯名词解释1.引言1.1 概述概述自动扶梯是一种用于垂直运输人员的交通设施,也称为自动人行道。
它由一系列与楼梯相似的移动步道组成,通过连续的循环运动,将人们从一个楼层平稳地运送到另一个楼层。
自动扶梯是现代城市生活中常见的一种交通工具,广泛应用于商业中心、购物中心、地铁站等人流密集的地方。
自动扶梯通过电动机驱动,能够实现人员的快速、高效、安全的垂直运输。
其在设计和制造过程中考虑了人体工学和安全性,拥有创新的技术和先进的控制系统。
它提供了一个舒适、便捷的交通方式,不仅能够减轻步行负担,还能够提供轻松和无障碍的访问体验。
自动扶梯的运行原理基于链式运输系统和步道的结构。
链式运输系统由一个或多个链条组成,链条由电机带动,使得整个步道形成循环运动。
步道上安装着一系列金属桥板,它们连接在一起,形成一个平稳的移动表面。
在运行过程中,人们可以站在步道上,随着其连续运动,轻松地上下楼层。
自动扶梯具有多项优势和应用价值。
首先,它提供了高效的人员运输方式,可以快速地将大量人员从一个楼层运送到另一个楼层,节省了时间和劳动力。
其次,自动扶梯的设计考虑了人体工学和安全性,使得乘坐过程更加舒适和安全。
此外,自动扶梯还可以成为商场、购物中心等场所的标志性建筑,增加了其吸引力和竞争力。
随着科技的不断进步和社会的不断发展,自动扶梯也在不断创新和改进。
未来的自动扶梯可能会采用更加智能化和环保的设计,运用先进的材料和能源技术,提高运行效率和节能减排。
同时,自动扶梯可能还会与其他交通工具和智能系统进行连接,实现更加便捷和智能化的交通方式。
综上所述,自动扶梯是一种重要的交通设施,具有广泛的应用价值和发展前景。
它通过创新的设计和高效的运行,为人们提供了舒适、便捷和安全的垂直交通方式。
在未来,随着科技和社会的不断进步,自动扶梯将继续发展壮大,为城市交通和人们的出行提供更好的服务。
1.2文章结构文章结构是指文章按照一定的布局和组织形式来展现内容的方式。

XR 600系列—————————————————————————————————————————————————扶梯/人行道电器调试手册概述:本手册对D10C5系列普通、智能型扶梯、人行道控制系统的安装、使用、维护进行了全面系统的阐述, 可作为系统安装调试维护的使用参考资料。
型号及含义:目录:第一章电器原理图——1 第四章控制系统操作说明——12 第七章控制系统元件表——20第二章电器放线图——6 第五章调试说明——————15 第八章故障代码表————24第三章控制系统简介—7 第六章维护说明——————19 第七章整机电器配置表——25说明:本手册内容如有更改恕不另行通知。
第三章控制系统简介一.概述:控制系统包括上端控制箱、下端配线箱、照明、安全开关、控制按钮监控装置及连接线缆。
a)制系统采用了PCL程序控制, PCL机是控制系统的核心。
主要控制器件及驱动控制部分均在上部控制箱内, 其具体组成说明见”电气控制系统元件明细表”。
b)电源要求三相五线制, 相电压为380V( +7﹪-10﹪) , 接地电阻不大于4Ω。
二.主要功能:a)Y/Δ起动( 8kw可直接启动) ;b)正常运行;c)检修运行;d)智能运行;e)缺相和错相保护电机过热保护。
三.辅助功能:a)安全制动器;b)中心润滑系统;c)电机速度监控( 超、欠速) 、非操作防逆转监控;d)故障显示功能;e)扶手带速度监控( 超、欠速) 、 ( 根据用户要求) ;f)运行方向指示灯( 根据用户要求) ;g)附加制动器( 根据用户要求) ;四.安全回路a)从接线端号A34、 B10、 A35、 A36、 A37、 A38、 B11为基本安全回路, 不可随便跨接。
b)从接线端号A15开始经A16、 A17、 A18、 A19、 A20、 A21、 A22、 A23、 A24、 A25、 A26、 A27、 A28、 A29、 A30、A31、 A32、 A33、 A34为常规安全回路, 在检修运行时, 为排故障需要能够临时跨接, 但正常运行时严禁跨接。
自动扶梯和自动人行道附加制动器电控系统问题由来和建议一、背景GB16899-1997(EN115:1995)自1998年2月1日起已开始强制执行,在标准12.6规定的条件下,自动扶梯和自动人行道必须装设附加制动器。
由于标准没有规定附加制动器的具体实现形式,且自动扶梯和自动人行道在2004年前并没有列入生产许可证管理的设备范围,因此GB16899-1997(EN115:1995)标准并没有得到全面贯彻实施。
2004年开展自动扶梯和自动人道制造许可和型式试验工作以来,我们发现各制造厂家附加制动器动作原理差距甚远,各检测机构对标准和细则的要求也不一致,造成了一定的混乱。
因此提请安全技术委员会对有关技术问题进行分析和澄清,以助于正确全面的贯彻标准和细则,促进行业的健康发展。
二、问题由来目前市场上已出现多家企业生产安装在自动扶梯和自动人行道上的附加制动器,其电气控制部分的原理如附图1和附图2。
主驱动链上装有防断裂开关,当主驱动链断裂时,防断裂开关动作,常开触点JA闭合,附加制动器的电磁线圈得电,使得附加制动器动作。
梯级或者踏板回路的上部和下部分别装有一个光电开关,将光电开关的信号送入PLC的输入端,检测回路的运转方向和速度。
当电梯超速或者非操纵逆转时,PLC输出一个动作信号,使得附加制动器的电磁线圈得电,附加制动器动作。
其中需要特别指出的是,这种系统在附加制动器的电磁铁是不通电的,当常开触点JA闭合或者PLC输出点导通后,电磁铁才通电触发附加制动器动作。
即附加制动器的工作机理是得电动作的。
三、存在的主要问题分析存在的主要问题有:1.上述电控系统触发电磁铁是得电动作的。
我们在2004年型式试验中发现有多台按照上述原理设计的附加制动器不能动作,仔细分析主要是因导线松动线圈绝缘损坏等原因,而由于正常运行时电磁铁是不通电的,因此无法检测出回路的异常情况。
估计在用自动扶梯和自动人行道附加制动器有相当比例的附加制动器现已失效,构成了安全隐患,请总局领导给予高度重视。

一、概述系列自动扶梯是由一台特种结构型式的链式输送机和两台特素结构型式的交代输送机所组合而成的,用以在建筑物的不同层高间运输人员上下的一种连续输送机械。
该扶梯是一种带有循环运动梯路向上或向下倾斜输送乘客的电力拖动设备,主要被用来在建筑物的不同层高间连续运送人员上下。
它以电力驱动,在一定方向上能够大量、连续运送乘客、在人流集中的公共场所、商店、车站、机场、码头、大厦及地铁站等要在较短时间内运送大量人员的地点,通常使用。
该系列扶梯的设计制造符合国标16899-2011《自动扶梯和自动人行道的制造与安装安全规范》,产品具有结构紧凑、重量轻、运行平稳、舒适感好、输送能力大、运送客流量均匀、安装维修方便等优点。
本梯可正转也可反转,连续运行,以满足上下客的需要。
二、产品介绍第一篇机械部分1产品的型号该自动扶梯的产品系列主要为:1) 普通型自动扶梯(),采用铝型材扶手支架,均是链条式传动,其倾斜度分别为30°和35°,梯级宽度系列1000 、800和600型。
2) 苗条型自动扶梯(),采用不锈钢型材扶手支架,均是链条式传动,其倾斜度分别为30°和35°,梯级宽度系列1000、 800和600型。
2主要型号规格及技术参数3主要结构及工作原理本系列自动扶梯由金属骨架、曳引装置、驱动装置、扶手驱动装置、梯路导轨、梯级传动链、梯级、扶手装置、梳齿前沿板、电气控制系统、自动润滑系统等部分组成,如图1-1所示。
图1-1 自动扶梯总体示意图(1)梯级(2)曳引装置(3)驱动装置(4)梯路导轨(5)金属桁架(6)梳齿前沿板(7)扶手装置(8)电气控制系统(9)安全保护系统(10)自动润滑系统3.1 金属桁架:金属桁架的作用在于安装和支撑自动扶梯的各个不见、承受各种载荷以及将建筑物两个不同层高的地面连接起来。
端部驱动及中间驱动自动扶梯的梯路、驱动装置、张紧装置、导轨系统以及扶手系统等安装在金属结构的里面和上面。
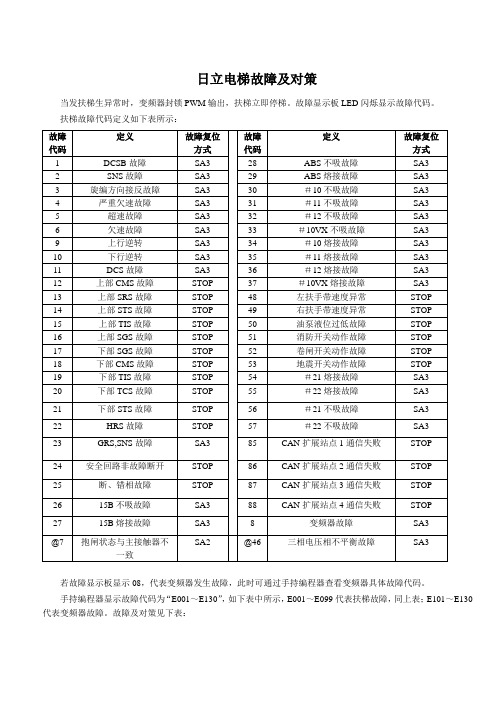
日立电梯故障及对策
当发扶梯生异常时,变频器封锁PWM输出,扶梯立即停梯。
故障显示板LED闪烁显示故障代码。
扶梯故障代码定义如下表所示:
若故障显示板显示08,代表变频器发生故障,此时可通过手持编程器查看变频器具体故障代码。
手持编程器显示故障代码为“E001~E130”,如下表中所示,E001~E099代表扶梯故障,同上表;E101~E130代表变频器故障。
故障及对策见下表:
故障排除后,可使用故障复位功能,清除LED显示的故障代码,变频器恢复正常。
1.非通讯控制方式下(F0.02=0、1、),外部位端子复位XRESET功能绝对有效;XSTOP条件有效,键盘复位功能绝对有效;上位机复位功能无效。
2.通讯控制方式下(F0.02=42时),外部位端子复位XRESET功能绝对有效;XSTOP条件有效,键盘复位功能绝对有效;上位机复位功能绝对有效。

自动扶梯的工作原理和故障绪言自动扶梯广泛用于酒店、商场、地铁、火车站、写字楼、机场等场所,在方便顾客和提高服务质量等方面起到了相当重要的作用。
自动扶梯是带有循环运动梯路向上或向下倾斜输送乘客的固定电力驱动设备。
它是由一台特种结构形式的输送机和两台特殊结构形式的胶带输送机组合而成的,用以建筑物的不同高度间运载人员上下的一种连续循环输送的机械设备。
一系列的梯级与两根牵引链条连接在一起,在按一定线路布置的导轨上运行即形成自动扶梯梯路。
牵引链条绕过上牵引链轮、下张紧装置并通过上、下分支的若干直线、曲线区段构成闭合环路。
这一环路的上分支中的各个梯级(也就是梯路)应严格保持水平,以供乘客站立。
.上牵引链轮(也就是主轴)通过减速器与电动机相连以获得动力。
扶梯两旁装有与梯路同步运行的扶手装置,以供乘客扶手之用。
扶手装置同样由上述电动机驱动。
为了保证自动扶梯乘客绝对安全,要求装设多种安全装置。
为了使乘客舒适,对公共场所不产生噪声污染,对扶梯的主要要求使运行平稳,噪声小。
故降低噪声和振动是扶梯技术的主要攻关项目。
第一章、自动扶梯的工作原理自动扶梯的核心部件是两根链条,它们绕着两对齿轮进行循环转动。
在扶梯顶部,有一台电动机驱动传动齿轮,以转动链圈。
典型的自动扶梯使用100马力的发动机来转动齿轮。
发动机和链条系统都安装在构架中,构架是指在两个楼层间延伸的金属结构。
自动扶梯由梯路和两旁的扶手组成。
梯路是--台变型的板式输送机,扶手是变型的带式输送机。
若干梯级与牵引链联接组成梯路。
在梯路的承载分支上,梯级踏板必须始终保持水平以供乘客站立。
梯级在乘客入口处先作水平运动,以利乘客登梯,以后逐渐形成阶梯。
在接近出口处阶梯逐渐消失, 梯级再度作水平运动。
上述运动都是由梯级的主轮、辅轮分别沿不同的梯级导轨行走来实现的。
为了乘客安全,在梯路两旁设有与梯路同步运动的扶手。
同时,在进、出口的地面有略倾斜的梳齿板,梯级运行到进、出口处时,梯级的齿与梳齿板的齿相互嵌合,以便乘客安全登梯和离梯。
自动扶梯电气故障排除的案例阐述作者:许业伟来源:《中国住宅设施》2017年第08期摘要:本文在分析自动扶梯电气故障现象的基础上探讨了电气故障具体排除,动态控制电气故障发生率,促使自动扶梯各方面性能作用顺利发挥,始终处于正常运行状态。
关键词:自动扶梯;电气故障;排除;案例一、案例一(一)电气故障现象与原因在用PLC试验台模拟测试自动扶梯运行电气控制柜过程中,控制柜试验台32A空气开关合闸之后,控制柜中0.5A的F2保险管熔断,而40A的总电源空气开关处于跳闸保护状态。
在电气故障排除过程中,检修人员初步判断该自动扶梯出现这一电气故障现象的原因并不单一,比如,控制柜DC48V线路出现对地短路故障或者其和AC220V等相窜;控制柜某一相线、零线出现短路故障。
(二)电气故障排除在排除自动扶梯电气故障中,检修人员先要仔细检查PLC试验台、自动扶梯控制柜二者接线是否正确,在万用表作用下,仔细检查自动扶梯相线以及零线,看其是否导通。
如果检查过程中并没有发现问题,则说明自动扶梯控制柜相线、零线二者并没有出现短路故障。
随后,检修人员要巧用万用表,准确测量自动扶梯控制柜F2保险管输入某端的电压,看其是否和AC220V等线路窜入。
如果并未发现异常,检修人员则要将重心放在DC48V对地短路故障方面,巧借电气故障排除方法,明确出现对地短路现象的线路,进一步准确定位故障发生具体位置,结合电气故障发生的原因,实时科学处理自动扶梯运行中出现的电气故障,促使故障自动扶梯在最短的时间内恢复正常运行。
相应地,在排除电气故障过程中,检修人员要多层次准确把握自动扶梯工作原理以及组成要素,深层次分析出现的电器故障现象,便于在最短的时间内解决电气故障。
相应地,下面便是自动扶梯工作原理示意图。
二、案例二(一)电气故障现象在自动扶梯运行中,其上下行可以正常运行,但供电电压、主控板之间的开关电源直流电压+V和-V各输出端的对地电压都为0。
同时,自动扶梯上电过程中,主控板变频检测电源出现缺相以及错相故障现象。
代号LAG绿色方向指示器LAR红色方向指示器LBB/9.6照明LG/7.2机房内照明LKP/7.4梳齿板照明LSS/7.4梯级间距照明MGB/1.7制动器释放线圈MGBA/2.5安全制动器触发线圈MH/1.3主驱动电机NGP/2.7电源印板P/7.3插座PBL/3.6维修空插头PEM/17.1主控制印板PES/16.1副控制印板PGH/3.8维修操作板插头PHSE/12.7围裙光电管接受器PHSS/12.6围裙光电管传输器PHVE光电管扫描接受感应器PHVS光电管扫描传输感应器PRE/3.6维修板插座PSR4/4.3继电器、接触器输出印板照明继电器RE1/4.7星形连接继电器、接触器输出RE2/4.8三角形连接继电器、接触器输出RE3/4.6上行连接继电器、接触器输出RE4/4.5下行连接继电器、接触器输出RGB/2.8安全制动继电器RHM/6.2信号终止继电器RKBF消防继电器RKPH/1.6相序监控继电器RPHV扫描传感器继电器RR/6.5方向继电器RSK/3.6安全回路继电器RSKM/13.4安全回路信号继电器RSSL围裙板信号继电器RSFU慢速继电器RSWS水位探测信号继电器RWS水位探测继电器RRE检修继电器SBL/7.6照明接触器SD三角形连接接触器SFE/2.3起动运行接触器SIBS/1.1客户提供熔断器控制熔断器SIS1/1.6控制熔断器SIS2/2.2控制熔断器SKVB/4.1速度监控主接触器(上端) SKVT/4.1速度监控副接触器(下端) SR-D/4.5下行接触器SR-U/4.6上行接触器SRE-A维修关闭接触器SY星形连接接触器SFU变频器接触器THS/9.4高压变压器TS/2.1控制变压器WTHM/1.3电机定子绕组(PTC)热敏电阻ZQH/10.1操作小时计算器SLPE1乘客光幕1接触器。
扶梯、步道的电气控制原理自动扶梯是一种倾斜的带有连续循环运动梯路向上或向下输送乘客的电力驱动设备,它的主要特点是:1、输送能力大,输送客流均匀,能连续输送乘客;2、可以向上或向下运行;3、当停电或故障时可作普通楼梯通道使用,不影响楼层之间的交通;4、造型美观,可以美化环境;5、结构比较紧凑,占地面积小,使用维护方便。
扶梯步道扶梯和步道广泛适用于各大型商场、车站、地铁车站、码头、航空港、购物中心等公共场所。
由于自动人行步道与扶梯除了有梯路运行和水平运行的区别外,其他差别不大,因此在本章中不再另行介绍。
在本章中,都以蒂森克虏伯公司生产的FT822型扶梯为例。
扶梯的电气控制部分相对简单,主要有驱动电路、控制电路、安全回路、显示(设置)面板、装饰灯光电路等,下面具体介绍。
一、扶梯的上下行和启动电路。
1、扶梯的上下方向运行。
从电路中来说,扶梯的上下行的实现就是让电动机的正转、反转。
知识回顾:三相交流异步电动机的工作原理:在定子绕组中通入三相正弦电流,就会在转子和定子之间产生旋转磁场。
( 根据安培定则或叫右手螺旋定则电生磁的原理) 由于旋转磁场与转子绕组之间有相对运动,则转子绕组切割磁场,在其中产生感生电压.因为转子绕组是闭合的,所以转子导体中便有电流流过。
(根据右手定则) 根据左手定则,通过电流的导体在磁场中要受到力的作用,这样转子就产生了转矩.在转矩的作用下。
定子就沿着旋转磁场的方向旋转起来了。
定子绕组源源不断地从电网中汲取电能经过电磁作用转化为机械能而输出,电动机就连续不断地旋转起来。
可见,要改变电动机的转向,就是改变旋转磁场的方向,只要把通入电动机定子绕组的三相电任意两相对调即可。
扶梯电路中上下行(正反转)的实现:如图1-a所示,k1.1为上方向运行交流接触器,k1.2为下方向运行交流接触器,k1.1工作时三相电源的顺序是U1、V1、W1进入电动机,K1.2工作时,三相电源的顺序是W1、V1、U1进入电动机,这样就改变了通入定子绕组的三相电源的相序,即改变了定子绕组同转子之间的旋转磁场方向,电动机就由正转变反转或上行变下行了。
2、电动机的启动。
知识回顾:三相交流异步电动机的降压启动有四种:定子回路串电阻、自耦变压器降压启动、星---三角形降压启动、延边三角型降压启动。
其根本目的都是为了减小启动电流。
因为蒂森克虏伯公司生产的FT822型扶梯用的是星→三角型降压启动,所以在此我们只讨论星→三角型降压启动这种方式。
如图1-a所示,k1.1为上方向运行交流接触器,k2.1为星型连接交流接触器,k2.2为三角型连接交流接触器。
我们先假设扶梯现在是上方向运行,即k1.1主触头闭合。
电动机刚启动时,首先星型连接交流接触器K2.1的主触头闭合,电动机变星型启动。
经过N秒的延时,星型连接交流接触器K2.1的主触头断开,三角形连接交流接触器K2.2的主触头闭合,电动机进入三角型正常运行。
我们知道,上面的k1.1(上行)、K1.2(下行)、K2.1(星型连接)、K2.2(三角形连接)交流接触器主触头的闭合与断开就是对相应交流接触器线圈得电与失电的控制。
那么它们是怎么来控制的呢?一般来说,是用启动按钮、停止按钮、时间继电器等来控制的,在蒂森克虏伯公司生产的FT822型扶梯中,该功能的控制是用可编程控制器(PLC)来实现的。
用的PLC具体型号是:西门子S7-200 。
知识引入:可编程控制器(PLC)的基本介绍。
一、可编程控制器概况可编程控制器(PROGRAMMABLE CONTROLLER,简称PC)。
与个人计算机的PC相区别,用PLC表示。
PLC是在传统的顺序控制器的基础上引入了微电子技术、计算机技术、自动控制技术和通讯技术而形成的一代新型工业控制装置,目的是用来取代继电器、执行逻辑、记时、计数等顺序控制功能,建立柔性的程控系统。
国际电工委员会(IEC)颁布了对PLC的规定:可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。
二、PLC的结构及基本配置一般讲,PLC分为箱体式和模块式两种。
但它们的组成是相同的,对箱体式PLC,有一块CPU板、I/O板、显示面板、内存块、电源等,当然按CPU性能分成若干型号,并按I/O点数又有若干规格。
对模块式PLC,有CPU模块、I/O模块、内存、电源模块、底板或机架。
无任哪种结构类型的PLC,都属于总线式开放型结构,其I/O能力可按用户需要进行扩展与组合。
PLC的基本结构框图如下:三、基本指令系统特点PLC的编程语言与一般计算机语言相比,具有明显的特点,它既不同于高级语言,也不同与一般的汇编语言,它既要满足易于编写,又要满足易于调试的要求。
目前,还没有一种对各厂家产品都能兼容的编程语言。
如三菱公司的产品有它自己的编程语言,OMRON公司的产品也有它自己的语言。
在逻辑运算部分,几乎所有的厂家都采用类似于继电器控制电路的梯形图,很容易接受。
如西门子公司还采用控制系统流程图来表示,它沿用二进制逻辑元件图形符号来表达控制关系,很直观易懂。
较复杂的算术运算、定时计数等,一般也参照梯形图或逻辑元件图给予表示,虽然象征性不如逻辑运算部分,也受用户欢迎。
一些高档的PLC还具有与计算机兼容的C语言、BASIC语言、专用的高级语言(如西门子公司的GRAPH5、三菱公司的MELSAP),还有用布尔逻辑语言、通用计算机兼容的汇编语言等。
不管怎么样,各厂家的编程语言都只能适用于本厂的产品。
本章节采用最常用的编程语言---梯形图(LAD)来讨论电路问题,它类似于电气原理图是符号,易为电气工作人员所接受。
对使用者不要求具备高深的知识、不需要长时间的专门训练,只要你能看懂电路图就能看懂梯形图。
什么叫梯形图呢?梯形图是通过连线把PLC指令的梯形图符号连接在一起的连通图,用以表达所使用的PLC指令及其前后顺序,它与电气原理图很相似。
它的连线有两种:一为母线,另一为内部横竖线。
内部横竖线把一个个梯形图符号指令连成一个指令组,这个指令组一般总是从装载(LD)指令开始,必要时再继以若干个输入指令(含LD指令),以建立逻辑条件。
最后为输出类指令,实现输出控制,或为数据控制、流程控制、通讯处理、监控工作等指令,以进行相应的工作。
母线是用来连接指令组的。
PLC的基本逻辑指令基本逻辑指令是PLC中最基本的编程语言,掌握了它也就初步掌握了PLC的使用方法,各种型号的PLC的基本逻辑指令都大台大同小异,现在我们针对三菱公司的FX2N系列,来看看其指令的功能和使用方法,。
每条指令及其应用实例都以梯形图和语句表两种编程语言对照说明。
一、输入输出指令(LD/LDI/OUT)下面把LD/LDI/OUT三条指令的功能、梯形图表示形式、操作元件以列表的形式加以说明:LD与LDI指令用于与母线相连的接点,此外还可用于分支电路的起点。
OUT 指令是线圈的驱动指令,可用于输出继电器、辅助继电器、定时器、计数器、状态寄存器等,但不能用于输入继电器。
输出指令用于并行输出,能连续使用多次。
X000 Y000 地址指令数据0000 LD X0000001 OUT Y000二、触点串连指令(AND/ANDI)、并联指令(OR/ORI)AND、ANDI指令用于一个触点的串联,但串联触点的数量不限,这两个指令可连续使用。
OR、ORI是用于一个触点的并联连接指令。
X001 X002 Y001 地址指令数据0002 LD X001 X003 0003 ANDI X0020004 OR X0030005 OUT Y001三、电路块的并联和串联指令(ORB、ANB)符号(名称)功能梯形图表示操作元件ORB(块或)电路块并联连接无ANB(块与)电路块串联连接无含有两个以上触点串联连接的电路称为“串联连接块”,串联电路块并联连接时,支路的起点以LD或LDNOT指令开始,而支路的终点要用ORB指令。
ORB指令是一种独立指令,其后不带操作元件号,因此,ORB指令不表示触点,可以看成电路块之间的一段连接线。
如需要将多个电路块并联连接,应在每个并联电路块之后使用一个ORB指令,用这种方法编程时并联电路块的个数没有限制;也可将所有要并联的电路块依次写出,然后在这些电路块的末尾集中写出ORB的指令,但这时ORB指令最多使用7次。
将分支电路(并联电路块)与前面的电路串联连接时使用ANB 指令,各并联电路块的起点,使用LD或LDNOT指令;与ORB指令一样,ANB指令也不带操作元件,如需要将多个电路块串联连接,应在每个串联电路块之后使用一个ANB指令,用这种方法编程时串联电路块的个数没有限制,若集中使用ANB指令,最多使用7次。
X000 X002 X003 Y006X001 X004 X005ORBX006X003地址指令数据0000 LD X0000001 OR X0010002 LD X0020003 AND X0030004 LDI X0040005 AND X0050006 OR X0060007 ORB0008 ANB0009 OR X0030010 OUT Y006有了上面关于PLC的基础知识,我们再来看扶梯需要星三角降压启动时,用PLC是怎样控制的。
用可编程控制器控制电机的正反转或星三角降压启动时控制电路中的接触器触点逻辑关系可用编程实现从而使线路接线大为简化。
用可编程控制器实现电机星三角降压启动的接线图,主电路不变,控制电路如图1-b所示,请结合图1-a来看。
KM1.1(上行)上行钥匙开关 I1.0 Q1.0下行钥匙开关 I1.1 Q1.1 KM2.1(星)I1.2 Q1.2 KM2.2(三角)停止按钮 PLCS7-200 FR(热继电器常闭触头) COM NDC 24v AC 220v图1-b只画出上行的简单梯形图如下:星)三角)现在我们来分析梯形图,在梯形中,I1.0是扶梯上行的钥匙开关,当扭动此开关时(I1.0闭合),能流从母线通过I1.0到达I1.2,而I1.2是闭合的,能流到达M30.0。
这里可以把M30.0看成是在PLC内部的一个中间继电器,能流到达后,它便动作了。
M30.0的动作后,其常开点变成了常闭点,锁住了扶梯上行的钥匙开关I1.0,使M30.0一直闭合。
再来看下一句,M30.0闭合,能流分成了三路,一路使上方向运行的交流接触器KM1.1动作;第二路通过定时器T40的常闭点到达KM2.2线圈,使KM2.1闭合;第三路到达T40定时器,使T40定时器开始记时。
此时,由于KM1.1、KM2.1接触器线圈得电,从电路图中可知电动机作星行启动。