矢量计算题
- 格式:doc
- 大小:392.50 KB
- 文档页数:3



场论典型例题第一章 矢量分析 例题1、(基本矢量计算)已知两个矢量j i 2+=A ,j i 34+=B ,求(1)B A + (2)B A - (3)B A •(4)B A ⨯ (5)若A 和B 两矢量夹角为α,求αcos 。
解:(1)B A +=)34()2(j i j i +++=j i )32()41(+++=j i 55+ (2)B A -=)34()2(j i j i +-+=j i )32()41(-+-=j i --3 (3)B A •=)34()2(j i j i +•+=)32()41(⨯+⨯=64+=10(4)B A ⨯=)34()2(j i j i +⨯+=0 3 4 0 21 kj i =k 5- (5)根据内积的定义有:B A •=αcos B A ,其中A ,B 为矢量的模。
所以:BΑBA •=αcos 其中B A •在(2)中已经得到B A •=10,而A =5021222=++,B =5034222=++ 因此B ΑB A •=αcos =5510=52说明:此题可以用于掌握矢量运算法则。
例题2、(矢性函数的极限)设t t t cos sin )(B A F += )20(π<≤t ,式中A ,B 为矢量,分别为j i -=A ,j i +=B 。
求下列极限。
(1))(lim 3/t F t π→ (2)|)(|lim 3/t F t π→解:(1)整理)(t F 。
t j i t j i t t t F cos )(sin )(cos sin )(++-=+=B A=j t t i t t )sin (cos )sin (cos -++而 3/|)sin (cos π→+t t t =231+ 3/|)sin (cos π→-t t t =231- 所以)(lim 3/t F t π→=i 231++j 231- (2)|)(|t F =|j t t i t t )sin (cos )sin (cos -++| =22)sin (cos )sin (cos t t t t -++ =2=→|)(|lim 3/t F t π2说明:对矢性函数的极限,归结为对各坐标分量求极限,因此,需要温习高等数学中微积分中关于“函数极限”的内容,特别是一些常用极限的求法。
0前言大学物理与中学物理相比,最显著的区别就应用矢量、导数和微积分来分析和求解生活实践中更一般的实际问题,微积分思想和方法的运用,使大学物理相比于中学物理有质的飞跃。
相对于高等数学只注重代数形式的导数和微积分性质和计算,大学物理中几乎全是矢量的导数和微积分模型的建立和求解[1],如果没有掌握矢量的导数和微积分的处理方法,对于解物理问题,往往会觉得无从下手。
本文就大学物理中矢量的导数和微积分的求解问题提出自己的一点见解,以期对初学者有所帮助。
1矢量和微积分思想矢量是既有大小又有方向的量。
大学物理中很多物理量都是用矢量的乘法来表示,这就涉及矢量的点积与叉积,如功W =F →·r →=Fr cosθ结果为标量,力矩M →=r →×F →结果为矢量,其中θ为两矢量之间的夹角。
与中学物理研究的大都是“常量”、“标量”,用代数和平面几何去解决生活实践中某个特殊类型的问题不同,大学物理中的研究的大都是“变量”、矢量”,用矢量和微积分来解决生活实践中更一般的实际问题。
对于一般物理实际问题,常常需要应用微积分来解决,其基本思想是先“微”后“积”。
由于物理量对时间或者空间分布不均,因而需要把研究物理量在时间或者空间范围内进行无限次分割,分割后的物理量在这些足够小的时空区域(即微元区域)就变成了均匀分布,这时恰当的选取微元,写出元过程或者元贡献的表达式,然后把所有有限小的过程累加求和[2],再应用定积分,确定积分上、下限,然后求得计算结果。
大学物理中的矢量求解,不管是微分还是积分,首先要将矢量标量化运算,也就是说先要把矢量向某一方向或者坐标系进行投影,然后再进行微积分运算。
大体可以归纳为两类,一类是矢量的微分或求导问题,一类是矢量的积分问题。
2矢量的求导问题这类问题在大学物理中比较简单,一般就是先把矢量在坐标系进行投影,然后再在各个分量方向上求导。
例如由位矢r →(t )求速度v →(t )和加速度a →(t ),则先对r →(t )“矢量标量化运算”,即把r →(t )向直接坐标系进行x ,y ,z 方向进行投影,即有r →(t )=x (t )i ^+y (t )j ^+z (t )k ^,然后在个方向上进行求导,如v →(t )=dr →dt =dx dt i ^+dy dt j ^+dz dt k^,同样的,求加速度也是先投影后求导,a →(t )=dv →dt =dvx dt i ^+dv y dt j ^+dv z dt k ^=d 2x dt 2i ^+d 2y dt 2j ^+d 2z dt2k ^。
物理矢量练习题一、简答题1. 什么是物理矢量?物理矢量是在物理学中用来描述物理量的有大小和方向的量。
矢量可以表示位移、速度、加速度、力等物理量。
2. 什么是标量?标量是只有大小没有方向的物理量,如质量、时间、温度等。
3. 如何表示矢量?矢量可以使用箭头符号在物理图中表示,箭头的长度表示矢量的大小,箭头的方向表示矢量的方向。
4. 矢量之间有什么运算?矢量之间有加法和减法运算。
矢量相加时,将各个矢量的起点和终点相连,最终的结果是由起点到终点的矢量。
5. 矢量如何分解?矢量可以通过分解成两个或多个分量,表示为它们的合成或分解。
分解成两个分量时,可以使用垂直分解和平行分解的方法。
二、计算题1. 一个行人以速度5 m/s向东行走100 m,然后以速度3 m/s向北行走80 m。
求该行人的位移和总路程。
解:首先,我们将行人的位移分解成东西方向和南北方向的分量。
东方向分量的位移:100 m南方向分量的位移:80 m位移的大小:sqrt(100^2 + 80^2) ≈ 128.062 m位移的方向:arctan(80/100) ≈ 38.66°所以行人的位移是128.062 m,方向为东北方。
总路程:100 m + 80 m = 180 m2. 一个力F1 = 10 N向东,另一个力F2 = 8 N向北,求合力的大小和方向。
解:首先,我们将这两个力分解成东西方向和南北方向的分量。
F1的东方向分量:10 NF1的南方向分量:0 NF2的东方向分量:0 NF2的南方向分量:8 N合力的东方向分量:10 N + 0 N = 10 N合力的南方向分量:0 N + 8 N = 8 N合力的大小:sqrt(10^2 + 8^2) ≈ 12.806 N合力的方向:arctan(8/10) ≈ 38.66°所以合力的大小约为12.806 N,方向为东北方。
三、应用题1. 一个小汽车以速度20 m/s向东行驶10 s,然后以速度15 m/s向北行驶5 s,最后以速度10 m/s向西行驶8 s。


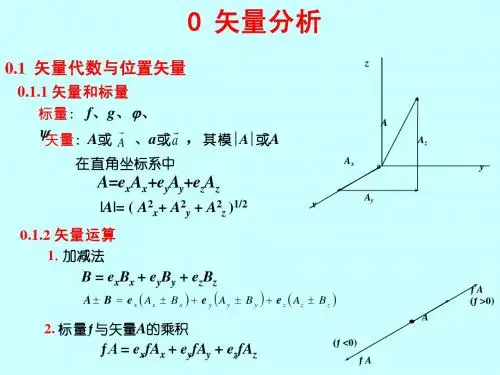
chap0 矢量代数0.1矢量与标量一.标量定义:只有大小,没有方向的量。
表示:数字(可带正负号)。
加法:代数和。
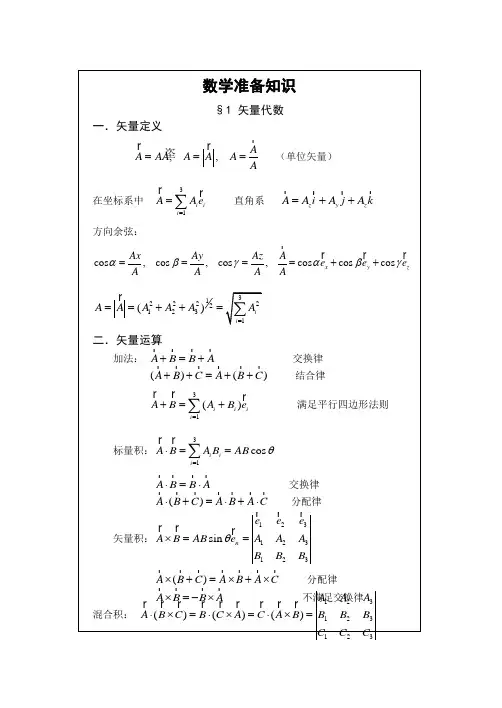
二.矢量定义:既有大小,又有方向的量。
表示:0A v v 矢量的模)矢量的大小A v (:1)A A = 方向的单位矢量沿A A v:0 2)有向线段 矢量的方向方向矢量的模)矢量的大小长度:(:加法:平行四边形法则或三角形法则。
0.2矢量的合成与分解一.矢量的合成Av Av v C v B v Bv Cv Av Bv Cv Dv Ev 说明:)(B A B A vv v v −+=−BA C v v v +=BA C v v +=DC B A E v v v v v +++=A v Bv Cv Bv −Av Cv Bv二.矢量的分解把一个矢量看成两个或两个以上的矢量相加。
1.矢量的分解Ø一般一个矢量有无穷多种分解法Av Cv B v A v xA v yA v CB A v v v +→yx A A A v v v +→2.矢量的正交分解z三.矢量和(差)的正交分量表示k A j A i A A z y x v vv v ++=v vv v k B j B i B B z y x ++=k B A j B A i B A B A z z y y x x v vv v v )()()(±+±+±=±0.3矢量的乘积定义:一.矢量乘以标量Am B v v=二.矢量的标积定义:性质:1)A B B A v v v v ⋅=⋅v θψcos AB B A =⋅=vv )],([B A v v =θ2)C A B A C B A v v v v v v ⋅+⋅=+⋅)(3)B A B A v v v v ⊥⇔=⋅0 4)2A A A =⋅v v 矢量的标积的正交分量表示:zz y y x x B A B A B A B A ++=⋅vv 1=⋅=⋅=⋅=⋅=⋅=⋅k k j j i i i k k j j i v v v v v v v v v v v v三.矢量的矢积定义:==×=大小:)],([sin B A AB S BA S vv v v v θθ性质:⊥⊥满足右螺旋定则方向:,,B S A S v v v v 1)A B B A v v v v ×−=×2)C A B A C B A v v v v v v v ×+×=+×)(3)B A B A v v v v //0↔=×4)0=×A A v v矢量的标积的正交分量表示:0.4矢量函数的导数与积分一.矢量函数矢量A v与变量t 之间存在一定的关系,如果当变量t 取定某个值后,矢量A v有唯一确定的值(大小和方向)与之对应,则A v称为t 的矢量函数,即:)(t A A v v =二.矢量函数的导数定义tt A t t A t Adt A d t t ∆∆∆∆∆∆)()(lim lim 00v v vv −+==→→zv xy)(t A A v v =)('t t A A ∆+=v)()(t A t t A A v v v −+=∆∆O1)dtBd dt A d B A dt d vv v v ±=±)(2)dtAd m A dt dm A m dt d vv v +=)(B d A d d v v v v v v 性质三.矢量函数的积分定义v v v v B d v v,若)(t A A =,)(t B B =,且A dt=则B v称为A v 的积分,记为:∫=dt A B v v性质1)dt B dt A dt B A ∫∫∫±=±v v v v )(2)dt A m dt A m ∫∫=vv )( 常量)=m (3)dt A C dt A C ∫∫⋅=⋅vv v v )(常量)=C r (r 矢量函数积分的正交分量表示k dt A j dt A i dt A dt A z y x v v v v )()()(∫∫∫∫++=4)dt A C dt A C ∫∫×=×vv v v )(常量)=C (例题0-1 两矢量:k j i a v v v v−+=34,k j i b v v v v 543+−=,通过矢量运算求:求:(1)以a v 、b v为两邻边所作的平行四边形两对角线的长度;例0-2 两矢量函数:j i t a v v v2)12(+−=,j t i b v v v )32(−+−=。
高中物理矢量专题如果说中国近代史是一部血泪史,那么高中的物理学习史就是一部矢量史,矢量问题贯穿整个的高中物理学习过程,并且高中所有的矢量问题最终都是三角形的问题。
一、矢量的概念物理上有些物理量,只用大小不足以完整的描述这个物理量的属性,像力大小一样,方向不一样,加在物体上产生的效果是不一样的,这就需要引入矢量思想。
矢量对应数学上的向量。
1.矢量的定义——既有大小又有方向并且运算满足平行四边形法则的量叫做矢量(向量)(电流有大小有方向,但是标量)标量:仅有大小的量叫做标量标量仅有大小没有方向但有正负,如温度 t。
矢量的正负表示方向,比较大小时候看绝对值;标量比较大小是带正负。
2. 矢量的图形表示:带有箭头的线段线段长度——矢量大小箭头指向——矢量的方向3. 两矢量相等的条件:大小相等,方向相同.与起点无关4.矢量可以平移5. 负矢量——两矢量等大反向互称为负矢量二. 矢量的加法1.矢量加法的平行四边形法则两矢量 a与b 的和是以这两个矢量为两边的平行四边形的对角线矢量c ,记为:a+b=c通常将这种用平行四边形的对角线来求出两矢量和的方法叫——矢量加法的平行四边形法则.余弦定理求解大小2.矢量加法的三角形法则两矢量相加,要将一个矢量的起点移到另一个矢量的终点,然后连结一矢量的始点和另一矢量的终点,即为两矢量的和。
由于三个矢量构成一个三角形,所以称为矢量加法的三角形法则。
应当注意:合矢量可大于、等于、小于其它任一分矢量。
即三角形的任一边可大于、等于、小于其它任一边。
3.矢量加法的多边形法则依次作出各个矢量,其中后一个矢量的起点正好是前一个矢量的终点,那么从第一个矢量的起点到最后一个矢量的终点所引的矢量,即它们的矢量和.此时所有的分矢量与合矢量围成一个多边形.所以称为矢量加法的多边形法则。
注:① 力平衡时,构成一个封闭的三角形. ——三力平衡力三角形自行封闭②在共点力的作用下,物体处于平衡状态时,合力为零,构成一个封闭的多边形——多力平衡力多边形自行封闭.三.矢量的减法1.矢量减法的平行四边形法则可见求 c 与 a的差即求 c 与 -a 的和,可以按平行四边形法则或三角形法则计算——即矢量的减法实质上仍是矢量的加法,矢量的加、减法统称为矢量的合成.2.矢量减法的三角形法则两矢量相减,要将它们移到一个共同的起点,然后从减项矢量的终点向被减项矢量的终点所引的矢量即为所求之差。
1.5 矢量场的通量和散度习题解答1. 如图所示,均匀矢量场A通过半径为R 的半球面的通量为( ) A. 2πA R B. 2πA R C. 22πA R D. 22πA R解析:本题考查通量的概念,基本知识点如图所示,可知矢量A 从1S 面穿入,再从S面穿出 因此:1d 0S S A S11d d d 0S S SS A S A S A S1d d SS A S A S由已知可知,矢量A 是均匀场,闭合曲面的法线方向是外法线方向,因此1S面的法线方向与矢量A 方向正好相反,1S的面积为2πR 。
122d d (π)πSS A S A S A R A R2. 关于散度,下列陈述错误的是( )A. 矢量场的散度是一个标量,是空间坐标点的函数B. 在场中某点M 处,若0A则说明该点有发出通量线的正源C. 在场中某点M 处,若0A则说明该点有汇集通量线的负源D. 在场中某点M 处,若0A 则说明该点既没有正源也没有负源,此时A称为无源场解析:本题考查散度的性质,基本知识点在场中处处存在0A ,A才称为无源场。
仅某些点处0A,不能称为无源场。
所以D 错误。
SS3. 已知矢量2322(32)()(3)x y z A x yz e y yz e xyz xz e ,则A ( ) A. 226(3)(6)x y z xe y z e xy xz eB. 22636x y z xy xzC. 2322323x yz y yz xyz xzD. 263x yz z解析:本题考查散度的计算,基本知识点22636y x z A A AA x y z xy xz x y z4. 标量场342x y z 的梯度场的散度( ) A. 24233234342x y z x y z x y zB. 24233234342x y z x y z e x y z e x y zeC. 42322346122xy z x y z x yD. 0解析:本题考查梯度和散度的计算,基本知识点242332344232234(342)6122x y z x y z e x y z e x y ze xy z x y z x y5. 如图所示,则在点M 处散度A( )A. 大于零B. 小于零C. 等于零D. 无法判断正负解析:本题考查散度的性质,基本知识点 习题难度:略难。
旋转矢量练习题一、问题描述已知三维空间中的一个向量A,其分量表示为(Ax, Ay, Az),请你编写一个程序,将该向量绕指定的旋转轴旋转指定的角度,并输出旋转后的向量坐标。
二、算法设计1. 输入向量A的分量(Ax, Ay, Az)。
2. 输入旋转轴的坐标(Rx, Ry, Rz)。
3. 输入旋转角度θ。
4. 将旋转轴单位化,得到单位向量R。
5. 计算向量A与旋转轴R的点积。
dot_product = Ax*Rx + Ay*Ry + Az*Rz6. 计算向量A在旋转轴上的投影。
projection = dot_product * R7. 计算向量A在旋转轴垂直方向上的分量。
perpendicular = A - projection8. 计算旋转向量B在旋转轴垂直方向上的分量。
B_perpendicular = perpendicular * cos(θ)9. 计算旋转向量B在旋转轴上的投影。
B_projection = dot_product * R * cos(θ)10. 计算旋转向量B在旋转轴方向上的分量。
B_parallel = dot_product * R * sin(θ)11. 计算旋转向量B的坐标。
Bx = B_projection.x + B_perpendicular.x + B_parallel.x By = B_projection.y + B_perpendicular.y + B_parallel.y Bz = B_projection.z + B_perpendicular.z + B_parallel.z12. 输出旋转向量B的坐标。
三、示例程序```pythonimport math# 输入向量A的分量Ax = float(input("请输入向量A的x分量: "))Ay = float(input("请输入向量A的y分量: "))Az = float(input("请输入向量A的z分量: "))# 输入旋转轴的坐标Rx = float(input("请输入旋转轴的x坐标: "))Ry = float(input("请输入旋转轴的y坐标: "))Rz = float(input("请输入旋转轴的z坐标: "))# 输入旋转角度theta_deg = float(input("请输入旋转角度(度): "))# 将旋转角度转换为弧度theta_rad = math.radians(theta_deg)# 计算旋转轴的单位向量R_norm = math.sqrt(Rx**2 + Ry**2 + Rz**2)Rx_unit = Rx / R_normRy_unit = Ry / R_normRz_unit = Rz / R_norm# 计算向量A与旋转轴的点积dot_product = Ax * Rx_unit + Ay * Ry_unit + Az * Rz_unit# 计算向量A在旋转轴上的投影projection = dot_product * Rx_unit, dot_product * Ry_unit, dot_product * Rz_unit# 计算向量A在旋转轴垂直方向上的分量perpendicular = Ax - projection[0], Ay - projection[1], Az - projection[2]# 计算旋转向量B在旋转轴垂直方向上的分量B_perpendicular = perpendicular[0] * math.cos(theta_rad), perpendicular[1] * math.cos(theta_rad), perpendicular[2] *math.cos(theta_rad)# 计算旋转向量B在旋转轴上的投影B_projection = dot_product * Rx_unit * math.cos(theta_rad),dot_product * Ry_unit * math.cos(theta_rad), dot_product * Rz_unit * math.cos(theta_rad)# 计算旋转向量B在旋转轴方向上的分量B_parallel = dot_product * Rx_unit * math.sin(theta_rad), dot_product * Ry_unit * math.sin(theta_rad), dot_product * Rz_unit * math.sin(theta_rad)# 计算旋转向量B的坐标Bx = B_projection[0] + B_perpendicular[0] + B_parallel[0]By = B_projection[1] + B_perpendicular[1] + B_parallel[1]Bz = B_projection[2] + B_perpendicular[2] + B_parallel[2]# 输出旋转向量B的坐标print("旋转后的向量B坐标为: ({}, {}, {})".format(Bx, By, Bz))```四、总结通过本程序,我们可以输入一个三维向量A的坐标、旋转轴的坐标以及旋转角度,然后计算得到旋转后的向量B的坐标。
矢量的基本知识和运算法则
1.矢量和标量的不同点在于:矢量除了有大小之外,还有方向,矢量A 记做A ,其大小等于A
矢量的图示:通常用一条带有箭头的线段来表示,(线段的长度表示大小,箭头表示方向)如图5-1所示。
两个矢量相等的条件是:大小相等,方向相同。
如图5-2所示。
两矢量的夹角定义为两矢量所构成的小于或等于1800的角。
在一般问题中(除非特别指明),矢量的始点位置不关重要的,在进行矢量运算时可将矢量平移。
2.矢量的加减法运算遵从平行四边形法则或三角形法则。
对三个以上的矢量相加,通常使用多边形法则。
3.矢量A 与数量K 相乘时,其结果仍是一个矢量。
所得矢量的大小等于原矢量大小乘以,所得矢量的方向:当K >0时,与原矢量方向相同;当K<0 时,与原矢量方向相反
如动量()mV 、冲量()F t ⋅∆都是矢量,其方向分别与矢量V 和F 矢量相同。
动量的变化量()m V ∆也是矢量,其方向与V ∆相同。
矢量A 与数量K 相除,可以看成A 矢量乘以数量
1K ,如加速度1F a F m m ==⋅,方向与F
相同。
4.矢量A 与矢量B 相乘 一种乘法叫做两矢量的数量积(又叫点积),用AB
⋅表示,乘得的积是标量,大小等于两矢量的大小与两矢量夹角余弦的积。
即:c o s A B A B θ⋅=。
如:功是力F
与位移S 的数量积,是标量。
c o s W F S F
S θ=⋅= 另一种乘法运算是两矢量的矢量积(又叫叉积),用A B ⨯表示,矢量积A B C ⨯=还是一个矢量,其大小等于两矢量的大小和两矢量夹角的正弦的乘积。
sin C A B θ=⋅,即矢量C 的大小等于两矢量A 和B 为邻边的平行四边形的面积,矢量C 的方向垂直于矢量A 和B 所决定的平面,指向用“右手螺旋法则”来确定,如图5-5(甲)或(乙)所示。
A B B A ⨯≠⨯,A
B ⨯与B A ⨯大小相等,方向相反。
如力矩M 等于力F 和矢径r 两矢量的矢量积,力矩M r F =⨯,大小为sin M Fr θ=。
带电粒子所受的磁场力(即洛仑兹力)F qV B =⨯,大小为sin F q vB θ=⋅(若是负电荷受力方向与此相反)
例5-1为什么说匀速园周运动既不是匀速运动,也不是匀变速运动?物体在运动过程中合外力是否做功?
解:因为速度和加速度都是矢量,在图5-6所示的圆周上任意取两点A 、B ,虽然,A B A B v v a a ==,但方向不同,由矢量相等的条件可知:A B v v ≠,A B a a ≠,因此匀速园周运动既不是匀速运动,也不是匀变速运动。
由功的定义得:c o s W F S F S θ=⋅=,因为作用于匀速园周运动的物体上的合外力F 始
终沿着半径指向圆心,与位移S 的方向垂直。
故cos
02W FS π==,所以物体在做匀速园周运动的过程中,合外力(即向心力不做功)
例5-2判断图5-7所示的带电粒子受力的方向。
解:根据F qv B =⨯,用右手螺旋法则得出带电粒子的受力方向竖直向上(如图5-8) 例5-3空间某处O ,有互相垂直的两个水平磁场1B 和2B ,55121.7310, 1.0010B T B T --=⨯=⨯,现在该处有一段载流直导线,问导线应如何放置,才能使两磁场作用在它上面的合力为零。
解:以O 为坐标原点,建立直角坐标系oxyz ,令2B 沿x 轴方向,1B 沿y 轴方向(如图5-9)
根据安培定律:F I l B =⨯
磁场作用于载流导线上的力F 垂直于l 和B 所决定的平面,并依右手螺旋定则规定其方向。
为使两磁场作用于载流导线的合力为零,则导线l 必须置于oxy 平面内,设它与y 轴的夹角为θ,则有:
11sin F B Il θ=方向沿z 轴向上。
()0222sin 90cos F B Il B Il θθ=-=,方向沿z 轴向下。
平衡时:12sin cos 0B Il B Il θθ-= 012
cot 1.73,30B B θθ==∴= 即导线与1B 所成的角度为300,与2B
所成的角度为600。
例5-4图5-10是一张斜碰的闪光照片。
大球的质量m 1=201.1g 小球的质量m 2=85.4g 。
两球都是从下向上运动,碰撞后左、右分开,闪光的快慢是每秒30次,照片和实物的线度比例大约是1:10,试作出它们的动量分析图,并求出两球的动量的改变量12P P ∆∆和,由此可得出什么结论? 解:由照片所示的两球位置和线段的比例,分别量出两球碰撞前后。
在
130秒内所通过的距离。
大球:/1110 6.0 6.010 5.0 5.0S mm cm
S mm cm =⨯==⨯= 小球:/22107.07.0,
109.09.0S mm cm S mm cm =⨯==⨯= 由此计算出两球碰撞前后的速度:
大球:()()21/
21 6.030 1.810(/) 1.8(/)
5.0 1.5/ 1.5/v cm s m s v cm s m s =⨯=⨯==⨯=
小球:()()
()()22/
22730 2.110/ 2.1/930 2.710/ 2.7/v cm s m s v cm s m s =⨯=⨯==⨯=⨯=
根据动量P m
v =算出两球碰撞前后的动量: 大球:碰撞前:1110.2011 1.80.36(/)P m v kg m s ==⨯=⋅,方向与V 1相同。
碰撞后://1110.2011 1.50.30(/)P m v kg m s ==⨯=⋅,方向与/1V 相同。
小球:碰撞前:22228.54 2.1100.18(/)P m v kg m s -==⨯⨯=⋅,方向与2V 相同。
碰撞后://22228.54 2.7100.23(/)P m v kg m s -==⨯⨯=⋅,方向与/
2V 相同。
两球碰撞前后动量的变化量:
大球:()//11111P P P P P ∆=-=+-
小球:()//22222
P P P P P ∆=-=+- 选取比例线段,根据平行四边形法则,作动量分析图(图5-11),从图中可以量得:
10.13(/)P kg m s ∆=⋅ 20.13(/)
P k g m s ∆=⋅两者方向相反。
所以:12P P ∆=-∆
即两球碰撞前后动量的改变量是大小相等,方向相反的。