逆变器中死区效应及其补偿策略分析
- 格式:pdf
- 大小:142.55 KB
- 文档页数:3


三相逆变器死区补偿一、引言在电力系统中,逆变器是将直流电转换为交流电的关键设备之一。
而三相逆变器是一种常见的逆变器类型,广泛应用于太阳能发电、风能发电等领域。
然而,由于逆变器本身的特性,会存在一个称为死区的问题。
本文将对三相逆变器死区补偿进行深入探讨。
二、三相逆变器死区问题的原因三相逆变器在将直流电转换为交流电时,需要通过开关器件来控制电流的流向。
然而,由于开关器件的切换速度有限,会导致在切换过程中,同时打开或关闭的两个开关器件存在一个时间上的间隔,即死区。
这个死区会导致电流在切换过程中断,使得逆变器输出的交流电存在失真现象。
三、三相逆变器死区补偿的方法为了解决三相逆变器死区问题,研究者们提出了多种补偿方法,下面将介绍其中的几种常见方法。
3.1 死区补偿电路死区补偿电路是一种常见的补偿方法,它通过在开关器件的控制电路中添加补偿电路,来消除死区带来的影响。
补偿电路可以根据死区时间的大小和开关器件的特性进行设计,使得在切换过程中电流能够平滑地流过。
3.2 死区补偿算法除了通过电路来进行死区补偿外,还可以通过算法来实现死区补偿。
死区补偿算法可以根据逆变器输出的电流波形,计算出合适的补偿信号,从而消除死区带来的失真。
3.3 死区时间的选择死区时间的选择也是一项重要的工作。
过小的死区时间可能导致开关器件的损坏,而过大的死区时间则会导致输出电流的失真。
因此,需要根据具体的应用场景和开关器件的特性来选择合适的死区时间。
3.4 死区补偿的效果评估在进行死区补偿时,需要对补偿效果进行评估。
评估的方法可以包括输出波形的失真程度、电流的谐波含量等指标。
通过评估补偿效果,可以进一步优化补偿方法和参数的选择。
四、三相逆变器死区补偿的应用场景三相逆变器死区补偿技术在各种领域都有广泛的应用。
以下列举了几个常见的应用场景:1.太阳能发电系统:太阳能发电系统中的逆变器需要将太阳能电池板产生的直流电转换为交流电。
死区补偿可以提高逆变器的转换效率,减少输出波形的失真,从而提高太阳能发电系统的整体性能。

PWM 逆变器死区影响的几种补偿方法摘要:分析逆变器死区对输出电压的影响以及几种常用的补偿方法。
关键词:死区 补偿 逆变器 脉宽调制1 1 引言引言引言 死区可以避免因桥臂开关管同时导通的故障,但死区同时也引起反馈二极管的续流,使输出电压基波幅值减小,并产生出与死区时间△t 及载波比N 成比例的3、5、7…次谐波,这是设置死区带来的缺点。
这个缺点对变频调速系统的影响最为显著。
特别是在电机低速运行时,调制波角频率ωs 减小,使载波比N 相对增大,因此,死区△t 中二极管续流引起的基波幅值减小,和3、5、7…次谐波的增大更加严重。
在这种情况下,为了保证系统的正常运行,就必须对死区中二极管续流的这种不良影响进行补偿。
常用的最基本补偿方法有两种:一种是电流反馈型补偿,另一种是电压反馈型补偿。
它们的共同补偿原理就是设法产生一个与二极管续流引起的误差电压波形相似、相位相差180°的补偿电压ucom,来抵消或减弱误差波的影响。
所谓误差波,就是由反馈二极管续流而引起的误差电压。
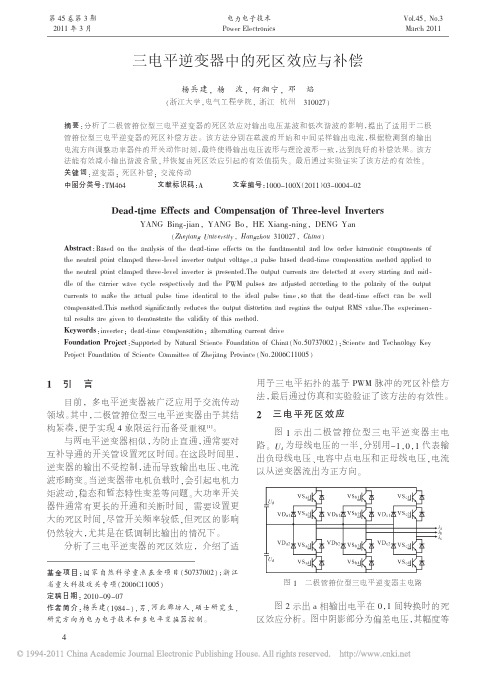
三相半桥式SPWM 逆变器电路图见图1。
2 2 电流反馈型补偿电流反馈型补偿电流反馈型补偿 死区设置方式有两种,即双边对称设置和单边不对称设置。
现以双边对称设置方式为例来进行说明,其结果对单边不对称设置方式也同样适用。
带死区的SPWM 逆变器在感性负载时,基波幅值的减小与3、5、7…次谐波幅值的增大都与Δtωc=ΔtNωs 成正比(ωc 为SPWM 中三角波电压的角频率),随着死区时间△t 及载波比N 的增加,输出电压基波幅值将减小,3、5、7…次谐波幅值将比例增大。
当ωs 减小N 相对增大时,这种影响进一步加剧。
为了保证逆变器的正常运行,就必须消除这种不良影响。
加入补偿电路就能很好地达到这个目的。
采用电流反馈型的补偿电路如图2所示。
通过检测逆变器的三相输出电流,并把它变成三相方波电压分别加到各自的调制波us 上,例如将检测到的A 相电流iA,变成方波电压ui 加到A 相调制波us 上,方波电压ui 使逆变器产生一个与电流iA 相位相同,与误差波uD1.4波形相似,但与uD1.4相位相反的补偿电压ucom,如图3所示。

三电平逆变器死区效应电力电子技术的进步推动了电力系统的发展,三电平逆变器作为一种高效率和高性能的功率变换器件,已经得到了广泛的应用。
然而,在实际应用中,这些逆变器往往会受到死区效应的影响,从而降低其性能表现。
本文旨在探讨三电平逆变器中死区效应的成因以及相应的解决方法。
第一部分:死区效应的成因三电平逆变器中的死区效应指的是当逆变器切换信号发生变化时,由于晶体管或开关器件的导通延迟和关断时间,会导致输出电压短暂地接近于零。
这种现象会引发一系列问题,包括增加了逆变器的损耗、引起输出谐波的产生以及造成电机振荡等。
死区效应的主要成因有两个方面:1.器件的非理想性:逆变器中的晶体管或开关器件存在导通和关断的时间延迟,导致死区的产生。
这是由于器件的内部结构和材料特性引起的,无法完全避免。
2.控制信号的非理想性:逆变器的控制信号在实际应用中受到多种因素的影响,例如传输延迟、干扰等,这些都会导致控制信号的不准确性,进而造成死区效应的产生。
第二部分:死区效应的影响死区效应对三电平逆变器的性能表现产生了明显的影响,主要体现在以下几个方面:1.损耗增加:由于死区效应导致输出电压在切换过程中短暂接近零,会引发电流冲击,使逆变器的开关器件发生不必要的过渡导通或关断,从而增加了能量损耗。
2.谐波产生:死区效应会引起输出电压的脉动,从而产生谐波。
这些谐波会对电力系统的稳定性和电机的运行带来不利影响。
3.电机振荡:输出电压的不稳定性会导致电机的振荡,甚至引发电机失速等不良现象,从而影响系统的正常运行。
第三部分:死区效应的解决方法为了克服死区效应带来的问题,有以下几种解决方法:1.增加死区时间:通过延长器件的导通时间和关断时间,可以有效地避免死区效应的发生。
这需要在设计和控制中对逆变器的参数进行调整和优化。
2.改进控制策略:采用更加精确和准确的控制算法,可以提高控制信号的精度,从而减小死区效应的影响。
例如,可以采用先行触发技术或者预测控制方法等。

逆变器过零死区补偿全文共四篇示例,供读者参考第一篇示例:逆变器是一种电子器件,能够将直流电转换为交流电。
在逆变器中,过零是一个重要概念,而死区补偿则是一种常见的技术手段。
本文将对逆变器、过零和死区补偿进行详细介绍。
一、逆变器逆变器是一种将直流电转换为交流电的电子装置,它可以将直流电源转换为交流电源,以实现在交流负载上的供电。
逆变器的应用十分广泛,常见于太阳能发电系统、风能发电系统、电动汽车等领域。
逆变器的工作原理是通过将直流电源转换成包含多个不同频率的交流电源,这样可以满足不同负载的需求。
逆变器一般由开关元件、控制电路和输出滤波电路组成。
开关元件可以是晶闸管、二极管、场效应管等,控制电路负责控制开关元件的开关时间,输出滤波电路用于过滤输出电压的谐波。
二、过零在交流电波形中,过零指的是电压或电流的数值等于零的瞬间。
过零是一个重要的概念,因为在逆变器中,为了确保电路的正常工作,需要在逆变器输出波形的每个周期的开始和结束点都保证是零电压状态。
这样可以避免电路在开关时产生过大的峰值电流,从而保护电路元件不被过载。
为了实现过零,通常需要在控制逆变器的开关元件时,对电压或电流信号进行检测,当信号经过零点时,及时进行切换,以确保输出波形的平稳过渡。
通过精确的过零控制,可以有效地降低逆变器的谐波失真,提高输出波形的质量。
三、死区补偿在逆变器的控制过程中,死区是一个常见的难题。
死区指的是开关元件在切换时存在一段时间的延迟,这段延迟时间内开关元件同时导通或者同时关断,会导致电路出现短路或断路的情况。
这种现象会导致输出波形的失真,降低逆变器的效率和稳定性。
为了解决死区带来的影响,通常采用死区补偿技术。
死区补偿通过在控制电路中引入一个补偿信号,可以在开关元件切换时适当提前或延迟一定时间,从而避免开关元件同时导通或关断的情况发生。
这样可以有效地消除死区对输出波形的影响,保证逆变器的正常工作。
在现代逆变器设计中,通常会结合过零和死区补偿技术,以提高逆变器的性能和可靠性。
第40卷第3期2006年3月浙 江 大 学 学 报(工学版)Journal o f Z hejiang U niv ersity (Engineering Science )Vol.40No.3M ar.2006收稿日期:20050301.浙江大学学报(工学版)网址:w w w.journals.z /eng作者简介:吴茂刚(1976-),男,山东莱芜人,博士生,从事电力传动及其控制技术的研究.E -mail :w mg _2004@空间矢量PWM 逆变器死区效应分析与补偿方法吴茂刚,赵荣祥,汤新舟(浙江大学电气工程学院,浙江杭州310027)摘 要:针对电压源型空间矢量脉宽调制逆变器的死区效应,提出了一种根据电流矢量判断电流极性的死区补偿方法.分析了因死区时间、功率器件导通关断时间引起的误差电压矢量,在不同的电压矢量扇区内根据电流极性的不同,通过矢量合成的方法得出了误差电压矢量的幅值,给出了该矢量和三相电流极性的对应关系,并在静止参考轴系内完成了补偿算法.结果表明,死区效应引起了逆变器输出电压波形畸变,引起了电机电流波形畸变和转矩脉动.该补偿方法能有效改善电机导流波形,提高了逆变器的输出性能.关键词:误差电压矢量;死区补偿;电流矢量角;永磁同步电动机中图分类号:TM 301.2 文献标识码:A 文章编号:1008973X (2006)03046905Analysis and compensation method of dead time effectfor space vector PWM inverterWU M ao -gang ,ZHAO Rong -xiang ,T ANG Xin -zhou(Col lege of E lectrical Engineering ,Z hejiang University ,Hangzhou 310027,China )A bstract :Aimed at dead tim e effect of v oltag e -fed space vecto r pulse w idth mo dulatio n (SV PWM )invert -er ,a novel com pensatio n method detecting current polaritie s from the current vector w as presented.Erro r voltage vector g enerated by the dead time ,pow er devices turn -o n and turn -off time w as analyzed ,and the am plitude o f error voltage vector w as calculated in diffe rent vo ltage vecto r secto rs unde r different 3-phase current po larities.The relationship o f erro r voltage vecto r and 3-phase current polarities w as given ,and the compensation alg orithm w as im plemented in the stationa ry reference frame.The results indicate that the dead time effect distor ts inverter output voltage and current w aveform and increases torque ripples of the motor.The compensation metho d can effectively improve mo to r cur rent waveform ,the inverter ’s out -put perform ance can be greatly enhanced.Key words :erro r vo ltage vector ;dead time co mpensation ;current vector angle ;permanent magnet synchro -nous mo to r (PMSM ) 电压空间矢量脉宽调制(space vecto r pulse width modulation ,SVPWM )技术在交流传动领域获得了日益广泛的应用,它从电机的角度出发,着眼于如何使电机获得幅值恒定的圆形磁场,即正弦磁通,逆变器通过三相桥臂开关管的不同开关模式产生实际磁通去逼近基准磁通圆,从而达到较高的控制性能.而在实际应用中,开关管由于存储效应而存在关断延时,为保证同一桥臂的开关管不发生直通,必须在开通和关断信号之间设置一个死区时间,同时,开关器件本身存在开通和关断延时,因此理想的调制信号和开关管输出的实际信号之间存在偏差.这个偏差引起死区效应,使输出电压波形产生畸变,降低了基波幅值,增加了低次谐波含量和电机的谐波损耗,在低频以及高载波频率时,会使电机电磁转矩发生较大脉动,严重地影响了系统的运行性能[1-5].本文运用空间矢量的分析方法,引入了误差电压矢量的概念,按照三相电流极性不同,在每个扇区内分析误差矢量的方向和大小,得出误差矢量在空间的分布.结合控制系统的特性,采用了预测电流的方法对死区进行补偿.实验中将该方法应用于基于转子磁场定向的永磁同步电动机(permanent mag -net sy nchronous m otor ,PM SM )矢量控制系统.1 S VPWM 死区效应分析图1为三相SVPWM 电压源型逆变器带电机负载的结构图,以单相逆变器桥臂为例分析死区和开通关断时间对输出电压的影响,且定义电流极性以流向负载为正.图1 三相SVPWM 逆变器-电动机F ig.1 T hree -pha se SV PW M inver te r -mo to r图2为逆变器A 相桥臂触发信号和输出电压的波形图,图2(a )、(b )为理想的上、下桥臂开关管触发信号,图2(c )、(d )为经死区延迟和器件开通关断延时之后的开关管实际输出信号,图2(e )为该相桥臂的输出电压波形.阴影部分是两个器件都关断的安全余量区间,即两个开关管都关断的实际死区时间,为了避免与设置的死区时间混淆,在此定义为误差时间,此区间的输出电压值由负载电流的方向决定:1)当电流i a 为正,下桥臂二极管D -a 导通,输出电压u ao =-0.5U dc ;2)当电流i a 为负,上桥臂二极管D +a 导通,输出电压u ao =0.5U dc .图2(e )两条虚线之间的宽度为理想的输出正脉冲电压时间,按照电流i a 极性不同分析实际输出脉冲电压与理想给定脉冲电压的宽度差值:1)当电流i a 为正,实际正脉冲宽度比理想给定脉冲宽度窄,减少的时间为T er =T d +T on -T off .(1)式中:T d 为死区时间;T on 、T off 为器件的开通和关断时间;T er 为输出电压实际脉宽与理想脉宽的误差时间.图2 A 相逆变器的触发信号和输出电压Fig.2 P ha se pulse signals and o utput vo ltag e of inve rter2)当电流i a 为负,实际正脉冲宽度比理想给定正脉冲宽度宽,增加的时间为T er ,因此可以用一个电流极性的符号函数sgn (i a )T er 来表示原来脉冲误差时间的变化.其中:sg n (i a )=1;i a >0,-1;i a ≤0.对于其他两相逆变器输出电压脉宽,同样具有上述关系.图3 SVPWM 第三扇区输出电压波形Fig.3 Third sector output voltage waveforms of SV PWM将误差时间内产生的电压定义为误差电压,下面以SVPWM 电压矢量合成的第三扇区为例,分析误差电压矢量的产生,图3为在第三扇区内逆变器的输出电压波形,中心线将载波周期分为左右对称的两部分,虚线是理想的电压上升和下降沿,在阴影部分的误差时间内,逆变器输出0.5U dc 还是-0.5U dc 是由电流极性决定的,以i a 、i b 、i c 极性“负正负”为例分析电压矢量的变化情况:此时u ao 、u co 的阴影部分为正电压,u bo 的阴影部分为正电压,V 4矢量的变化由u ao 、u bo 的脉宽变化确定,在中心线左半面V 4矢量作用时间增加了T er ,在中心线右半面V 4矢量作用时间也是增加了T er ,在一个调制周期内,V 4矢量作用时间增加2T er ;V 6矢量的变化由u bo 、u co 的脉宽变化确定,在中心线左半面V 6矢量作用时间减少了T er ,在中心线右半面V 6矢量作用时间也是减少了T er ,在一个调制周期内,V 6矢量作用时470浙 江 大 学 学 报(工学版) 第40卷 间减少2T er .用电压空间矢量表示为图4,图中ΔV 4和ΔV 6矢量的作用时间为2T er ,则两者的合成矢量就是误差电压矢量ΔV 2,其作用的时间为2T er ,对应的电压值为4U dc T er /(3T ),空间位置滞后V 4矢量60°.以同样的方法分析其他5种电流极性,然后再分析其5个扇区,最后得出结论:误差电压矢量幅值恒定为4U dc T er /(3T ),随电流极性不同在空间共有6个方向,如图5所示.表1给出了在不同三相电流极性下,对应于图5的误差电压矢量.图4 误差矢量的合成Fig.4 Synthesiza tion of er ro r vector图5 误差电压矢量Fig.5 Err or voltage v ecto rs 表1 不同电流极性下的误差电压矢量T ab.1 Erro r v oltage vecto rs under different current polari -ties i a 极性i b 极性i c 极性ΔV ++-ΔV 6+-+ΔV 5+--ΔV 4-++ΔV 3-+-ΔV 2--+ΔV 12 PMS M 死区效应仿真基于以上对误差电压矢量的分析,用Matlab 软件对PM SM 转子磁场定向矢量控制系统建立仿真模型,进行了PMSM 速度环开环的死区效应仿真.PM SM 参数:定子相绕组电阻R s =5.0Ψ,定子d 轴绕组电感L d =0.03H ,q 轴绕组电感L q =0.05H ,转动惯量J =0.001kg m 2,极对数P =2.仿真中给定u d 值为-3V ,给定u q 值为50V ,所加的负载转矩T l =3N m.在一个电周期内三相电流的极性改变6次,误差电压矢量也有6次突变,相应的受控电气物理量也会有6次畸变过程.图6为一相电流波形,电流在畸变点处有保持原值甚至低于原值的趋向,出现过零点电流钳位和峰值削平现象,图7和图8为u q 和u d 波形,死区效应使u q 幅值减小并波动,使电机的有效输出转矩减小并波动,同样死区效应会使u d 偏离原值并振荡.图9为电机转速波形,三相电流波形的畸变导致了转速以6倍基速波动.误差电压矢量的幅值与母线电压、误差时间成正比,与载波周期成反比,方向由电流极性确定,当电机在低速轻载运行时,由于此时加到电机上的电压很小,因此很容易被误差电压抵消掉,使电机的最低转速受到限制,并且引发电机电磁转矩的低频脉动.3 SV PWM 死区补偿方法对于电流反馈型死区补偿方法,首先要准确检测到三相电流的极性,因此电流过零点的检测十分重要,比较常用的方法是直接检测电流过零点,而在转子磁场定向的矢量控制系统中,还可以用电流矢量角来判断三相电流的极性.对于直接检测过零点471第3期吴茂刚,等:空间矢量PWM 逆变器死区效应分析与补偿方法的方法,因电流在零点附近存在模糊性,准确的零点检测很困难,对于用电流矢量角的方法,由于电流是检测得到的,因此容易受检测精度的影响,且检测存在滞后,也会存在一定程度的偏差.电流极性的判断,本文采用预测电流的方法,该方法根据电流矢量角度判断三相电流极性,电流矢量角度不是通过检测实际电流得到的,而是根据控制系统的特性,由运算出来的电压矢量角度计算得来或直接得出的.由于PM SM 的功率因数角很小,稳态时随负载变化不大,因此可以用电压矢量角度减功率因数角得到电流矢量的角度,而对于i d =0的转子磁场定向控制系统,电流矢量就是i q .电压矢量角度可以通过u d 、u q 值和转子位置角θ计算出来,而i q 的角度则是θ加90°.电流矢量的角度和电流极性的对应关系如图10所示,图中根据三相电流极性的不同,将复平面分为6个扇区,通过计算电流矢量所在的扇区可判断出三相电流的极性.按i a 、i b 、i c 的顺序排列电流极性,电流矢量角度与电流极性的对应关系如表2所示.根据电流极性,按表1可以得到误差电压矢量ΔV ,死区补偿就是要产生与此误差矢量大小相等而方向相反的补偿矢量以抵消其作用,将补偿电压矢图10 电流极性与电流矢量角对应关系Fig.10 Relation betw een cur rent polarities and currentvecto r angle表2 电流矢量角度和补偿电压对应关系表T ab.2 Relation betw een cur rent vec to r angles and compen -satio n voltages 扇区i q电流极性u c omαu c om β4°-π6<θ≤π6+--K 06°π6<θ≤π2++-12K 32K 2°π<θ≤5π-+-1K 32K 3°5π6<θ≤7π6-++-K 01°7π6<θ≤3π2--+12K 32K 5°3π2<θ≤11π6+-+12K -32K 量以V com表示,则V com=-ΔV .(2)在αβ轴系内将V com 分解成2个分量u com α和u comβ,电流极性与这2个分量的对应关系如表2所示,表中K =4U dc T er /(3T )为误差电压矢量幅值,补偿后的分量为u α=u *α+u com α,(3)u β=u *β+u com β.(4)式中:u *α、u *β为原来给定电压矢量的α、β轴分量.4 实验结果将补偿方法应用到PMSM 变频调速系统中,系统的控制方法采用矢量控制中i d =0的转子磁场定向控制,主控制器采用美国TI 公司数字信号处理器TMS320F240,逆变器采用智能功率模块PM75RSE120(三菱).PM SM 参数为:额定功率P =7.5kW ,极对数P =3,额定电压380V ,额定电流17A.SVPMW 逆变器死区时间设置为5μs ,调制频率为8kH z.在低速(40r /min)轻载的情况下进行了实验对比和验证,图11(a )为未进行死区补偿的相电流波形,图11(b )为死区补偿后的相电流波形.图中,横(a )补偿前的相电流波形(b )补偿后的相电流波形图11 补偿前、后的相电流波形Fig.11 Wavefo rm o f phase cur rent befo re a nd after com -pensa tion472浙 江 大 学 学 报(工学版) 第40卷 坐标时间轴为250ms /格,纵坐标电压轴为500mV /格,对应于霍耳传感器检测到的电流值为1.67A /格.图11(a )中电流因为死区效应具有明显的畸变,与仿真图6波形相似,图11(b )中电流波形相对图11(a )明显正弦化,基本没有波形畸变的现象,正弦化的电流波形为优良的电机转矩控制提供了保证,改善了电机的调速性能.5 结 语对SV PWM 逆变器的死区效应进行了分析和仿真,推导出误差时间引起的误差电压矢量幅值与母线电压、误差时间和载波周期有关,而方向由三相电流极性决定,采用预测电流的方法产生一个与误差矢量大小相等、方向相反的补偿矢量来抵消其作用,采用的算法简单,只需编写软件就可实现,而无需额外硬件.该方案适合于应用SV PWM 逆变器的高性能交流传动系统,仿真和实验结果都验证了理论分析的正确性以及方法的可行性.参考文献(References ):[1]JON G L L.A new appro ach o f dead -time co mpensatio nfor PW M voltage inver ters [J ].IEEE Transactions on C ircuits and Systems ,2002,49(4):476483.[2]A T T A IA NESE C ,TO M A SSO G.P redictive compensa -tio n o f dead -time effects in V SI feeding induction moto rs [J ].IEEE Transactions on Industry Applications ,2001,37(3):856863.[3]M UN OZ A R ,LIPO T A.On -line dead -time compensationtechnique for open -loop PWM -V SI drives [J ].IEEE T rans -actions on Pow er Electro nics ,1999,14(4):683689.[4]U RA SA K I N ,SEN JYU T.A dead -time compensationstra teg y fo r permanent magnet sy nchr onous mo to r driv e suppressing cur rent distor tion [C ]∥The 29th Annual Conference of the IEEE on Industrial Electronics Society ,V irginia ,U SA :I EEE ,2003,2:12551260.[5]贺益康,智大为,王文举.交流励磁发电机输出电力谐波抑制技术研究[J ].浙江大学学报:工学版,2002,36(4):432436.HE Yi -kang ,ZHI Da -wei ,W A NG Wen -ju.Study on the technique fo r suppressing power -harmonics generated by an A.C.exited generator [J ].Journal of Zhejiang University :Engineering Science ,2002,36(4):432436.下期论文摘要预登对Nasrifar -Moshfeghian 方程的评价及扩展其到气液相平衡中韩晓红,陈光明,王 勤(浙江大学制冷与低温研究所,浙江杭州310027)摘 要:从热力学出发对Nasrifar -M oshfeg hian (N -M )两参数立方形状态方程进行评价,并将其应用到混合物的汽液相平衡计算中.N -M 状态方程结合M H V1混合规则对21种双元混合物的汽液相平衡数据进行了关联,与P R -M HV 1、SRK -M H V1模型相比,前者的关联精度比后两种模型所关联的精度低.为了更进一步提高关联精度,对于M HV 1混合规则进行了两方面的改进:1)引入了新的非对称参数f ;2)参数b 经验地采用非线性结合规则.N -M 方程结合改进后的M H V1混合规则对17种混合物的汽液相平衡数据进行了关联,关联结果与采用原M H V1混合规则所得的结果相比,精度有了一定的提高,而且绝大部分体系的精度与采用P R -M HV 1,S RK -M HV 1模型的精度略优于这两个模型的精度.但是对于极性体系,如丙酮/水,甲醇/水,精度仍然较差,原因为:N -M 状态方程本身的缺点,即总是考虑 b / T 的符号;在低温下计算时,对于具有较大压缩因子的物质不适应;参数b 的结合规则.总之,N -M 方程的提出为纯物质的饱和液体及混合物的汽液相平衡计算提供了有价值的参考.关键词:汽液相平衡;状态方程;混合规则473第3期吴茂刚,等:空间矢量PWM 逆变器死区效应分析与补偿方法。
PWM逆变器死区效应的补偿1引言在PWM三相逆变器中,由于开关管存在一定的开通和关断时间,为防止同一桥臂上两个开关器件的直通现象,控制信号中必须设定几个微秒的死区时间。
尽管死区时间非常短暂,引起的输出电压误差较小,但由于开关频率较高,死区引起误差的叠加值将会引起电机负载电流的波形畸变,使电磁力矩产生较大的脉动现象,从而使动静态性能下降,降低了开关器件的实际应用效果。
本文从分析死区效应的产生机理入手,寻求死区效应的补偿方法。
2死区效应的产生利用逆变器中的一个桥臂(。
由图2可见,输出理想波与实际波之间将会引起误差波。
若忽略开关器件的存储时间及脉冲上升与下降时间,误差波可认为是矩形波。
图1逆变器的一个桥臂图2死区误差及矫正波形图3死区效应的补偿3 1调整参考波形的补偿方法假定开关频率远大于基波频率,输出电流为正弦波,每一死区引起的电压误差近似相等,则死区时间对基波电压的影响可用电流正负半周的平均电压误差来表示。
每个死区的误差波面积为:Δe=tdUd(1)式中:td——死区时间(μs)Ud——直流电源电压(V)则在每一个基波周期内的误差平均值为:ΔU=sign(i)Ud(2)式中:M——每一个周期内开关的次数T——基波周期(μs)可见,电压损失与电流幅度无关,与电流方向有关。
平均误差电压对逆变器影响的波形。
其中ur为理想基波。
若负载为感性,则电流滞后ur的角度为φ′。
平均误差电压ΔU为矩形波,与电流i成反向关系,分解后基波为Δu1。
则实际基波电压u1为理想基波ur与误差基波Δu1的叠加。
第27卷 第11期2003年11月 信 息 技 术I NFORM ATI ON TECH NO LOGYVO L.27 NO.11Nov.2003逆变器中死区效应及其补偿策略分析张 涛1,张 强2,李良辰2(1.黑龙江省电力开发公司,哈尔滨150001; 2.亿阳集团有限公司,哈尔滨150090)摘 要:对死区时间对逆变器输出电压的影响进行了分析。
死区效应引起的电压偏差可以等效为一个与电流相为相反的方波。
并对死区效应的补偿策略进行了研究。
关键词:死区时间;逆变器;补偿中图分类号:T M464 文献标识码:B 文章编号:1009-2552(2003)11-0070-02Analysis of the dead-time effect of the inverterand its compensation methodsZHANG T ao1,ZHANG Qiang2,LI Liang2chen2(1.H eilongjiang Province Pow er Development Co.,H arbin150001,China;2.B right Oceans Corporation,H arbin150090,China)Abstract:The effects of the dead-time on the output v oltage waveforms of thePW M inverter are analyzed. The dead-time effect is evaluated by averaging the v oltage deviation over a half cycle of the inverter.The com pensation methods of the dead-time effect are studied.K ey w ords:dead-time;inverter;com pensation0 前言微处理和电力电子技术的迅速发展,极大地促进了PW M技术的发展和应用,各种PW M交流传动技术在工农业生产、国防和日常生活中得到了广泛的应用。
SVPWM逆变器死区效应补偿方法的研究DEAD-TIME COMPENSATION FOR VECTOR-CONTROL INDUCTION MOTOR PWMINVERTER王高林,贵献国,于泳,徐殿国(哈尔滨工业大学电气工程系,黑龙江省 哈尔滨市 150001) (Email: Wanggl@, Xianggui@, Yuyong@, Xudiang@ )摘要:针对伺服系统矢量控制系统,提出了一种可以补偿死区误差电压并消除零电流钳位效应的死区补偿方法。
在分析了影响死区效应的因素以及等效死区时间的表达式的基础上,采用平均死区时间补偿法,在两相静止轴系中对等效死区时间产生的误差电压进行了补偿。
为了提高电流极性检测的准确性,利用旋转轴系中的励磁电流和转矩电流分量经过坐标反变换,判断电流在两相静止轴系所处的扇区来决定需要施加的补偿电压。
另外为了更好地消除由于死区时间而产生的零电流钳位效应,将一种消除零电流钳位效应的方法结合到上述补偿方法中。
最后通过TMS320F2812 DSP芯片来实现补偿算法,并在11kW 伺服电机矢量控制系统中验证了补偿算法的有效性。
ABSTRACT: A dead-time compensation strategy is presented to compensate dead-time error-voltage and eliminate zero-current clamping effect for servo motor vector control system. The factor influencing dead-time effect is analyzed, and expression of equivalent dead time is deduced. Average dead-time compensation technique is adopted to compensate error-voltage at two-phase stationary frame. To improve accuracy of detection of current direction, components of magnetizing current and torque current are transformed into two-phase stationary frame. Therefore compensating voltage vector can be decided according to the sector the current vector is locating. In addition, a kind of zero-current clamping effect eliminating scheme is adopted combining with the above compensation method to improve the compensation performance. The proposed compensation method is performed with TMS320F2812 DSP chip. Experimental results demonstrate the efficiency of the dead-time compensation method in 11kW servo motor vector control system.关键词:伺服系统,空间矢量PWM,死区效应,零电流钳位,补偿KEY WORDS:servo system; space vector PWM; dead-time effect; zero-current clamping; compensation1 引言由于伺服系统在各种工业场合应用非常普遍,永磁伺服电机相关控制技术研究也获得了广泛重视,其中空间矢量脉宽调制技术(SVPWM)一直是一个热门的研究课题[1,2]。