SVPWM逆变器死区效应补偿方法的研究[1]
- 格式:pdf
- 大小:316.24 KB
- 文档页数:5
永磁同步电机SVPWM控制方法的死区分析与补偿作者:卢秀和佟雪佳许宏志张志杰来源:《中国高新技术企业》2013年第19期摘要:文章在理想和实际情况下,对逆变器死区效应及对永磁同步电机输出波形的影响进行了分析。
为了防止逆变器的“桥臂”发生直通,必须设置“死区时间”。
文章根据三相电流输出方向,分别按各相电流进行补偿,以达到消除死区效应的目的。
实验结果表明,该方法简单且不需附加硬件,具有较好的补偿效果。
关键词:空间电压矢量脉宽调制;死区效应;永磁同步电机中图分类号:TM341 文献标识码:A 文章编号:1009-2374(2013)28-0074-02空间电压矢量脉宽调制SVPWM控制已经成为三相逆变器中最重要的调制方式。
它的数学建型是以电机统一理论和电机坐标轴变换理论为基础的,物理意义直观,数学模型简单,并具有抑制转矩脉动、噪音低、电压利用率高等优点。
为防止逆变器同一桥臂上的两个功率管发生直通造成短路,必须设置死区时间。
但这会使逆变器出现死区效应,导致输出电流波形发生畸变,输出转矩减小,特别是在低速轻载时稳态转矩脉动,容易引起电机振荡,甚至无法正常工作。
针对在非理想特性下造成的死区效应,本文提出了根据将三相电流分成6个区域,并在各区域中按相电流方向对三相输出电压进行死区补偿措施,此方法不仅提高了逆变器低频轻载时的输出性能,且不需附加额外硬件,实现简单,易于模块化。
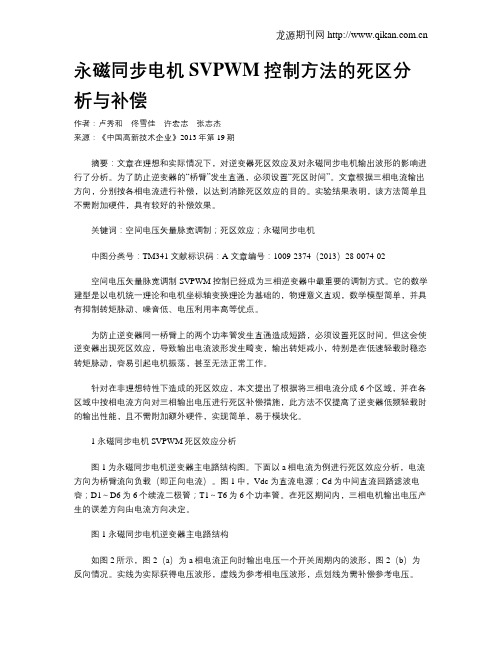
1 永磁同步电机SVPWM死区效应分析图1为永磁同步电机逆变器主电路结构图。
下面以a相电流为例进行死区效应分析,电流方向为桥臂流向负载(即正向电流)。
图1中,Vdc为直流电源;Cd为中间直流回路滤波电容;D1~D6为6个续流二极管;T1~T6为6个功率管。
在死区期间内,三相电机输出电压产生的误差方向由电流方向决定。
图1 永磁同步电机逆变器主电路结构如图2所示,图2(a)为a相电流正向时输出电压一个开关周期内的波形,图2(b)为反向情况。
实线为实际获得电压波形,虚线为参考相电压波形,点划线为需补偿参考电压。



基于svpwm调制策略的死区补偿方法
基于SVPWM(Space Vector Pulse Width Modulation)调制策略的死区补偿方法用于解决电机控制中的死区问题。
在电机控制中,由于硬件或软件原因,控制系统存在一个死区范围,即输入电压在该范围内,电机不会产生输出。
为了解决这个问题,可以采用死区补偿方法。
基于SVPWM 调制策略的死区补偿方法的基本思想是通过调整电压矢量的相位和幅值,使得电机在死区范围内仍能产生输出。
具体的步骤如下:
1. 确定死区范围:首先需要确定电机控制系统的死区范围。
可以通过实验或者根据硬件特性进行测量和确定。
2. 死区检测:在每个采样周期中,检测输入电压是否处于死区范围内。
如果输入电压位于死区范围内,则需要进行死区补偿处理。
3. 死区补偿:根据电压矢量的相位和幅值进行死区补偿。
一种常用的方法是将输入电压沿着电机空间矢量方向平移一个补偿值,使其脱离死区范围。
具体的补偿方法取决于具体的系统要求和硬件特性。
4. 重新调制:根据补偿后的电压矢量,对电机进行重新调制,生成新的PWM信号。
这样可以确保电机在死区范围内也能产生输出。
通过基于SVPWM调制策略的死区补偿方法,可以有效解决电机控制中的死区问题,提高系统的响应速度和控制性能。
PWM 逆变器死区影响的几种补偿方法摘要:分析逆变器死区对输出电压的影响以及几种常用的补偿方法。
关键词:死区 补偿 逆变器 脉宽调制1 1 引言引言引言 死区可以避免因桥臂开关管同时导通的故障,但死区同时也引起反馈二极管的续流,使输出电压基波幅值减小,并产生出与死区时间△t 及载波比N 成比例的3、5、7…次谐波,这是设置死区带来的缺点。
这个缺点对变频调速系统的影响最为显著。
特别是在电机低速运行时,调制波角频率ωs 减小,使载波比N 相对增大,因此,死区△t 中二极管续流引起的基波幅值减小,和3、5、7…次谐波的增大更加严重。
在这种情况下,为了保证系统的正常运行,就必须对死区中二极管续流的这种不良影响进行补偿。
常用的最基本补偿方法有两种:一种是电流反馈型补偿,另一种是电压反馈型补偿。
它们的共同补偿原理就是设法产生一个与二极管续流引起的误差电压波形相似、相位相差180°的补偿电压ucom,来抵消或减弱误差波的影响。
所谓误差波,就是由反馈二极管续流而引起的误差电压。
三相半桥式SPWM 逆变器电路图见图1。
2 2 电流反馈型补偿电流反馈型补偿电流反馈型补偿 死区设置方式有两种,即双边对称设置和单边不对称设置。
现以双边对称设置方式为例来进行说明,其结果对单边不对称设置方式也同样适用。
带死区的SPWM 逆变器在感性负载时,基波幅值的减小与3、5、7…次谐波幅值的增大都与Δtωc=ΔtNωs 成正比(ωc 为SPWM 中三角波电压的角频率),随着死区时间△t 及载波比N 的增加,输出电压基波幅值将减小,3、5、7…次谐波幅值将比例增大。
当ωs 减小N 相对增大时,这种影响进一步加剧。
为了保证逆变器的正常运行,就必须消除这种不良影响。
加入补偿电路就能很好地达到这个目的。
采用电流反馈型的补偿电路如图2所示。
通过检测逆变器的三相输出电流,并把它变成三相方波电压分别加到各自的调制波us 上,例如将检测到的A 相电流iA,变成方波电压ui 加到A 相调制波us 上,方波电压ui 使逆变器产生一个与电流iA 相位相同,与误差波uD1.4波形相似,但与uD1.4相位相反的补偿电压ucom,如图3所示。
三相两电平逆变器死区效应谐波分析及其补偿方法研究摘要:随着社会的发展,我国的科学技术的发展也越来越迅速。
电压源换流器在高压直流输电及新能源并网中起着至关重要的作用。
为研究基于脉冲宽度调制技术(pulsewidthmodulation,PWM)三相逆变器受死区影响的谐波特性。
为降低死区效应对电压谐波的影响,目前国内外学者已提出多种死区补偿方法。
死区对三电平PWM的3D几何墙模型的影响,基于双重傅里叶级数给出了死区时间影响下的输出电压谐波表达式,但未能分析死区补偿的设计方法。
因此,建立更为简洁的电压谐波模型以分析死区影响下的谐波特性,揭示死区效应引发谐波失真的机理,能为死区设计和补偿提供理论依据。
此外,建立更为精确的受死区影响的谐波模型能够为滤波元件的设计提供理论指导。
关键词:三相两电平逆变器;死区效应;谐波分析;补偿方法研究引言传统的两电平电压型逆变器,通常采用正弦电压脉宽调制(SPWM)和电压空间矢量脉宽调制(SVPWM)两种调制方式产生PWM电压,采用SPWM调制方式时输出线电压最大仅能达到直流母线电压的0.707倍,采用SVPWM线性调制时输出线电压最大可以达到与直流母线电压电压相同的值,但是这两种调制方法都没有充分利用逆变器输出电压的能力,其与逆变器六阶梯波工作状态时输出的基波电压还有一定差距,逆变器六阶梯波工作状态时输出的基波电压可以达到直流母线电压的1.103倍。
为了获得更大的输出电压,需要对逆变器采用过调制方法。
进入过调制区域后,逆变器输出电压将会产生畸变,谐波含量有所增加,这对电磁转矩的稳定性影响很大,采用合适的过调制方法尤为重要。
本文采用将过调制区域分为1、2两区的方法,对SVPWM调制区域划分的基本思想、过调制区域调制方法的原理与实现方法进行详细的分析与说明。
1电压空间矢量过调制区域在线性调制区,参考电压矢量终点被限制在六边形内切圆区域内,显然无法将逆变器输出电压的能力最大化。
第32卷第3期2020年9月宁德师范学院学报(自然科学版)Journal of Ningde Normal University(Natural Science)Vol.32No.3Sept.2020一种永磁同步电机交流传动系统SVPWM调制策略死区效应补偿方法黄兰兰,邓小群(贵州航天控制技术有限公司,贵州贵阳550009)摘要:针对采用空间矢量调制(SVPWM)策略的永磁同步电机(PMSM)交流传动系统"由于死区时间的设置、开关管导通及关断延时、系统采样及模拟数字(AD)转换延时等造成的“死区效应”,因此导致电机相电压、相电流畸变,谐波含量增大,转矩脉动及噪音增大,系统控制性能降低等问题.结合系统一拍延时补偿,提出一种“一拍延时+死区效应在线补偿”的方法.与其他方法相比,所提方法无需电流极性判断,无需逆变器特性参数,实现简单,并通过仿真验证了方法的有效性.关键词:交流传动系统;永磁同步电机(PMSM);死区效应;一拍延时补偿中图分类号:TM341文献标识码:A文章编号:2095-2481(2020)03-0259-06近年来,随着高开关频率功率半导体器件的发展,特别是集成式功率模块、智能功率模块(IPM)性能的,使得脉冲调制(PWM)在电压源逆变器(VSI)驱动系统中取得了广泛应用.针对采用空间矢量调制策略(SVPWM)的某大功率永磁同步电机(PMSM)交流调速系统,为了防止VSI同一桥臂上下开关管直通,IGBT模,系统控制,同开关管的驱动脉的导通时间即死区时间.同时开关管开通及关断延时,死区时间的加入和开关管本身开通、关断的延时,导致逆变电压的与,即“死区效应”.在电机控制系统中,死区效应会导致:电机的相电压、相电流畸变;电机电流谐波增大,增大;电机转矩脉动及噪音增大,直接系统控制性能.同时控制系统中由于采样、AD转换等延时造成的数字控制有的一拍延时:对系统的控制性能以及死区的准确性造成很大的.系统,优化控制,必须对系统有的延时以及死区进行有效补偿,国内外学者就死区及死区的、有效性开大量研究,提出了许多补偿的算法.主分为基于时间的补偿方法基于电压的方法,文献S1-2T的基于变精的数学模型,变精的非线性特性参数计算所需的补偿量.文献通过在系统拓扑上外加电流极性检测和逻辑电路调整PWM的信号,虽然可以达到对死区效应的,但是需要外加硬件电路,增加了系统成本,系统拓扑更为复杂,并且离线补偿方法不能实现对系统死区效应实时的补偿,精度不高.文献[6-11]基于电压的补偿方法,通过电压观测或者计算,将死区效应导致的电压到电压,采用平均电压误计算的方法依赖逆变非线数且时精好.文献线辨识的自适应方法,但计算较复杂,对系统硬求较.为解决部分已有方法断电流极性、逆变器特性参数等问题,进一步提高补偿算法的准确性,本文与系统延时相,采用电压观测器观测死区电压,对死区效应进行在线前馈精的方法.该方法无电流断,无增硬件电路,无变数,原清晰、.1VSI死区效应分析逆变器a相桥臂拓扑如图1所示.假设"为中性接地点,图2所示为采用SVPWM调制策略时,当"a>0时a相上桥臂理想脉冲与实际脉冲的分析图.对逆变器a相进行分析,#+(ideal)、#-(ideal)为a相电流大期:2020-09-02:黄兰兰(1994-),女,助理工程师.E-mail:*******************-260 -宁德师范学院学报(自然科学版)2020年9月于零时桥臂上下开关管的理想驱动脉冲'(real )、!-(re *+ )为插入死区时间后的开关管脉冲,其中死区时间 插入方式为单边不对称设置,即均在开关管导通脉冲的上升沿延迟时间"•从图中可以看岀,由于死区时间的加入以及开关管导通延时"沁 关断延时"逛的影响,实际的输岀电压比理想的输岀电压延迟了("-+"/)•!-an (real )! '(ideal )!-(i-eal )"an (equialent )图2 时*相上桥臂理想脉冲与实际脉冲当桥臂上开关管完全开通、下开关管完全关断时,由于开关管压降的存在,使得实际输岀的#孑#dc /2-#ce ;当桥臂上开关管关断时,由于此时$a >0,a 相桥臂的电流由下桥臂二极管续流,由于二极管通态 压降人存在,使得此时的#孑-#0/2-#-.考虑到死区时间,开通、关断延时,最后得到输岀电压的等效值为#*n (equialent ).当$*〉0时,导通时间偏差和输岀电压的偏差式为:"aerr 2 "d + "on - "ofif ,#aerr =学(#dc +#ie ) •SC考虑到同一桥臂电流的导通方向,可以表示为:"err 2"err ・Sgn ($*),#a err =#a er^-Sgn ($a ).(2)(3)⑷式中,sgn 为符号函数.通 分析得到,死区设置和开关管导通、关断延时造成的电压偏差与控制周期成反比,与母线电压成正比, 与当 电流极性有关.2死区效应电压补偿策略永磁同步电机交流伺服系统的控制框图如图3.本文主要对该系统中SVPWM制开关管死区 的 方,即图3中“延时+死区 ”.2.1电流一拍延时补偿计算数字控制器以其、噪声、 于实、 可于流丁位置、速度测量*统•但是由于数字控制中固有的采样、A/D图3永磁同步电机交流伺服系统的控制框图⑴转换、滤波延时等因素,导致控制器的输岀滞后于系统电流的变化〔叫即在%采样时刻得到电压矢量&严,但是直到%+1采样时刻这个电压矢量才被应用•此时在系统中仍选择%时刻的电压矢量就不符合实际需,尤其在时 延时对控制 能的影响 其严重,会使电 电流谐 增大,甚至导第3期黄兰兰等:一种永磁同步电机交流传动系统SVPWM 调制策略死区效应补偿方法-261 -统发散不稳定.同时也会对系统死区效应补偿电压计算的准确性产生很大影响!直接影响死区补偿的性能.因此,有必要在系统控制算法中增设一拍延时补偿!以实现系统较好的控制性能.永磁同步电机在两相静止坐标下的电压方程表示为:根据PMSM 电压方程,对其电流表达式进行离散,采用梯形积分法得到"+1时刻的电流表达式[12-13]:"+1" * / "-1 "#3+ ~+4—$s %sT !"r )S"+1"+1 * ・R "+1 "$s二%3 一卡旷(%P -%s &s(6 &式中:*sc 为系统采用的控制周期;$s 、"分别为电机的电阻、永磁体磁链.由于采用面贴式PMSM ,1g 轴电感,故可用其平均电感L s 控制计算.2.2 电压在线补偿观测器在两相静止坐标系下,根据式(6)可得永磁同步电机"91的电压方程表达式为:・"+1"+i "+i d% "+i "+1U s #R s %s +3s-$^+e (7)"+1式中:u dead 为死区设置导致的电压偏差.本文系统中采样频率为10 kHz ,控制周期足够短,可以认为在一个采样周期内反电动势和死区补偿电压 不 :"+1 "U dead % U dead *(9&"+1根据当前"时刻的电流参考值%s 以及对其做一拍延时补偿后的电流实际值%s ,可以得到当前时电压 为:.ref k-1refref% —% e+1u d R % +L ———s —e .s s s s* c c以计算 时 的电压补偿 为:ref "+1"ref k+1 refref% —%k+1U dead =U s —U s D U s — (R s %s +L s -9e )・(10)(11)在实 控制系统中, 的 在以 实 的 , 为 补偿的 稳定性,因此需要对电压补偿 行. 文将计算得到的电压补偿,到电压.电压在线补偿 的4.2.3仿真验证* c c图4电压在线补偿观测器原理框图系统采用 SFPWM 制的 PMSM系统进行验证,在Simulink 中搭建仿真模型(如图5).控制算法的采样频率为10 kHz ,电机运行在20%额定转速,VSI 中开关管死区时间分别设置为3)69 !s ,对补偿方法的 行性、有效性进行验证.-262 -宁德师范学院学报(自然科学版)2020年9月图5永磁同步电机交流伺服系统仿真模型在实际系统中,死区时间的加入主要有双边对称及单边不对称两种方式.本系统采用单边不对称方 式设置死区时间,即在每个开关管的驱动脉冲上升沿均延迟开通,实际仿真中同一桥臂上下开关管在加入死区时间后的导通脉冲如图6.n|?In|?I;0_ 1____________________________________________________ _<1110.80.6 11 1 1 10.4110.2丄dL-L0.81 ! 0.60.40.210.00.050 0.075"ZsFundamental (20 Hz )@1.895 *********** 2%0.0250.10010岫皿岫皿S •0.0 0.51.0 1.52.0 2.53.0 3.54.0 4.55.0//kHz图 7 不加死区时间相电流谐波分析0.0 0.10.2 0.3 0.40.5 0.6 0.7 0.8 0.9 1.0"ZsX 10-4图6同一桥臂上下开关管加入死区后的导通脉冲不加死区时间时电机相电流的FFT 分析如图7.从电流波形可以看出,不加死区时间时,电流谐波较小,电流波形平滑,不存在“死区平台”即零电流加入3 6 死区时的电流波形分析如图8、图9.从图8(a )、图9(a )可以看出死区时间的加入导致电机相电流存在死区平台,电流 ,使其谐波增大, 导致电机转矩脉动及噪音 ,系统损耗增大,效率降低•图8(b )、图9(b )为在加入死区时间后再加上本文中提出的电压补偿算法后的电流波形,可以看出通过加入,可以有效减轻电流“死区平台”效应,减轻电流的畸变•加入3 死区时,通过加入补偿,使其电流谐波 从9.852降低到4.31%;加入6 死区时,通过加上电流谐波含量从12.79%降低到6.73%.220.0250.0500.075"/sFundamental (20 Hz )@1.894 *********** 5%0.1000.0250.0500.0750.010"/sFundamental (20 Hz )@1.894 *********** 7%10.0 0.5 1.0 1.5 2.02.53.0 3.54.0 4.55.0/ZkHz(0)加补偿0.00.51.01.52.0 2.53.0 3.54.0 4.55.0/ZkHz(a )不加图8加入3 !-死区时间无补偿和有补偿的相电流谐波分析第3期黄兰兰等:一种永磁同步电机交流传动系统SVPWM 调制策略死区效应补偿方法一 263 —£PH 「H(a )不加补偿(b )加补偿图9加入6 !s 死区时间无补偿和有补偿的相电流谐波分析系统中加入9 !s 死区时间的对比波形如图10.在加入补偿后使相电流的谐波含量由17.74%降到9.0%,从电流的波形上可以明显看出死区平台时间的减少,削顶现象减轻,电流波形平滑度改善.tksll “亠..............................................................(4)不加补偿/7kHz(b )补偿图10加入9 !=死区时间无补偿和有补偿的相电流谐波分析通过仿真结果可以看出,在不同的死区时间设置情况下,所提补偿方法均能有效降低电流的谐波含量,减轻电流的畸变程度,减轻死区效应对系统控制性能的影响.3结论本文针对VSI 中SVPWM 调制的死区效应以及数字控制器的延时效应,提出一种结合一拍延时的死区效应补偿方法.方法先对系统由数字制器 的 延时 电流补偿,在 上用电压观测器观测由于死区导致的电压参考值与际值的偏差,最后对其进行前馈补偿.所提方法:电流极性的判断,无需逆变器的非线性特性参数,观,现 ;同时所提方法 到了系统由于采用数字控制器的固有延时,使死区效应补偿值的 .由际系统的复杂性、性, 后 在 际系统中对方法,本文 通过对 方法,辅以仿真验证.仿真结果证明了所提补偿方法的有效性,同时证明其在不同死区时间设置下补偿的 性,SVPWM 调制中死区效应补偿提 的方法.参考文献:[1] MURAI Y, WATANABE T, IWASAKI H. Waveform distortion and correction circuit for PWM inverter with switching lag-times卩].IEEE Transactions on Industry Applications,1987,23(5):881-886.[2] DODSON R C, EVANS P D, YAZDI H T, et al. Compensating for dead time degradation of PWM inverter waveforms 卩].IEEProceedings B-Electric Power Applications, 1990,137(2):73-81.一 264 —宁德师范学院学报(自然科学版)2020年9月[3] JEONG S G, PARK M H. The analysis and compensation of dead-time effects in PWM inverters [J]. IEEE Transactions on IndustrialElectronics,1991,38(2): 108-114.[4] 王高林,于 泳,杨荣峰,等.感应电机空间矢量PWM 控制逆变器死区效应补偿[J].中国电机工程学报,2008,28(15):79-83.[5] 陈斌,王 婷,吕征宇,等.电压型逆变器非线性的分析及补偿[J].电工技术学报,2014,29(6):24-30.[6] HUANG Q P, NIU W K, XU H P,et al .A nalysis on dead-time compensation method for direct-drive PMSM servo system [C]. ICEMS,2013: 1271-1276.[7] URASAKI N ,SENJYU T ,UEZATO K $et al . A daptive dead-time compensation strategy for permanent magnet synchronousmotor drive卩].I EEE Transactions on Energy Conversion,2007,22(2) :271-280.[8] URASAKI N , SENJYU T , UEZATO K , et al . A n adaptive dead-time compensation strategy for voltage sourceinverter fed motor drives [J]. IEEE Transactions on Power Electronics,2005,20 (5): 1150-1160.[9] KIM H S ,MOON H T , YOUN M J .O n-line dead-time compensation method using disturbance observer卩].I EEE Transactions onPower Electronics , 2003,18(6):1336-1345.[10] 李红梅,王 萍.面装式永磁同步电机驱动系统无位置传感器控制[J ].电工技术学报,2016,31 (S ):85-91.[11] BIBIAN S, JIN H. Time delay compensation of digital control for DC switch mode power supplies using prediction techniques [J]. IEEE Trans on Power Electronics,2000,15(5):835-842.[12] ZHANG Y C, XU D L, LIU J L, et al. Performance improvement of model predictive current control of permanent magnetsynchronous motor drives [J]. IEEE Transactions on Industry Applications,2017,53(4):3683-3695.[13] ZHANG Y C, XU D L, HUANG L L. Generalized multiple-vector-based model predictive control for PMSM drives [J].IEEE Transactions on Industrial Electronics, 2018,65(12):9356-9366.A research on dead time compensation for SVPWM modulation strategy with PMSMAC drive systemHUANG Lan-lan, DENG Xiao-qun(Guizhou Air Control Technology Co. Ltd., Guiyang, Guizhou 550009, China)Abstract : For the PMSM AC drive system with SVPWM modulation strategy, an analysis has been made onthe problems of the distortion of the motor phase voltage and phase current, the increase of harmonic contentand torque ripple and noise, and the decrease of the system control performance, the causes of which werethe dead-time setting, on and off delay on switching, the delay of the system sampling and AD conversion. Amethod of one beat delay + dead time on -line compensation method is proposed based on the analysis.Compared with other methods, the proposed method does not need current polarity judgment and inverter characteristic parameters, and is simple to implement. Finally, the effectiveness of the proposed method is verified by simulation.Key words : AC drive system; permanent magnet synchronous motor; dead effect;one beat delay compensation[责任编辑郭涓]。
SVPWM逆变器死区效应补偿方法的研究DEAD-TIME COMPENSATION FOR VECTOR-CONTROL INDUCTION MOTOR PWMINVERTER王高林,贵献国,于泳,徐殿国(哈尔滨工业大学电气工程系,黑龙江省 哈尔滨市 150001) (Email: Wanggl@, Xianggui@, Yuyong@, Xudiang@ )摘要:针对伺服系统矢量控制系统,提出了一种可以补偿死区误差电压并消除零电流钳位效应的死区补偿方法。
在分析了影响死区效应的因素以及等效死区时间的表达式的基础上,采用平均死区时间补偿法,在两相静止轴系中对等效死区时间产生的误差电压进行了补偿。
为了提高电流极性检测的准确性,利用旋转轴系中的励磁电流和转矩电流分量经过坐标反变换,判断电流在两相静止轴系所处的扇区来决定需要施加的补偿电压。
另外为了更好地消除由于死区时间而产生的零电流钳位效应,将一种消除零电流钳位效应的方法结合到上述补偿方法中。
最后通过TMS320F2812 DSP芯片来实现补偿算法,并在11kW 伺服电机矢量控制系统中验证了补偿算法的有效性。
ABSTRACT: A dead-time compensation strategy is presented to compensate dead-time error-voltage and eliminate zero-current clamping effect for servo motor vector control system. The factor influencing dead-time effect is analyzed, and expression of equivalent dead time is deduced. Average dead-time compensation technique is adopted to compensate error-voltage at two-phase stationary frame. To improve accuracy of detection of current direction, components of magnetizing current and torque current are transformed into two-phase stationary frame. Therefore compensating voltage vector can be decided according to the sector the current vector is locating. In addition, a kind of zero-current clamping effect eliminating scheme is adopted combining with the above compensation method to improve the compensation performance. The proposed compensation method is performed with TMS320F2812 DSP chip. Experimental results demonstrate the efficiency of the dead-time compensation method in 11kW servo motor vector control system.关键词:伺服系统,空间矢量PWM,死区效应,零电流钳位,补偿KEY WORDS:servo system; space vector PWM; dead-time effect; zero-current clamping; compensation1 引言由于伺服系统在各种工业场合应用非常普遍,永磁伺服电机相关控制技术研究也获得了广泛重视,其中空间矢量脉宽调制技术(SVPWM)一直是一个热门的研究课题[1,2]。
在SVPWM逆变器中,为了防止同一桥臂的两只开关管产生直通,需要在两只开关管的开通与关断时刻之间加入一定的死区时间,所产生的死区效应会造成逆变器输出电压基波分量减小、输出电流波形畸变及输出转矩脉动[3]。
在感应电机矢量控制场合,往往需要知道电压的状态量,由于输出电压是由离散的脉冲组合而成难以测量,通常直接将参考电压当作输出电压。
但与参考电压相比,实际的输出电压由于受死区时间影响而与参考电压有所差别。
因此为了能够进一步提高感应电机的控制性能,有必要对死区效应进行有效地补偿。
已经有众多学者对死区效应进行了研究,并提出了许多补偿方法[3-10]。
这些方法基本上可以分为两种,一种是基于平均误差电压补偿法,这种方法具有易于实现的优点,缺点是补偿不够精确,后来又有学者对开关器件管压降引起的附加死区时间,以及电路中寄生参数对死区效应的影响进行了研究[11,12]。
另一类方法是基于脉冲的补偿方法,这种方法可以对死区时间进行较精确地补偿,但对控制芯片的要求也更高,要求在一个PWM载波周期内进行两次采样[12]。
死区补偿中电流极性的检测很重要,如果对电流过零点判断不够准确反而会引起误补偿。
尽管很多补偿方法能够取得不错的补偿效果,但在低速轻载的场合,经常会发生零电流钳位的现象,使输出电流产生畸变[12]。
本文研究了一种采用平均误差电压补偿法并结合消除零电流钳位效应的方法对感应电机PWM逆变器的死区效应进行了补偿,最后在11kW伺服电机系统中对这种补偿方法进行了验证。
2 PWM 逆变器死区效应分析图1为伺服系统PWM 逆变器的原理图。
由于死区时间的存在,使得在死区时间内输出电压的大小不受开关管控制,由输出电流的流向来决定,另外IGBT 的开通和关断都需要一定的时间,再考虑到IGBT 和反并联二极管的通态管压降,这些因素共同作用使得输出电压产生了一定的误差。
图1 三相PWM 逆变器原理图 Fig.1 Three-phase PWM inverter下面以a 相为例来分析PWM 逆变器的死区效应。
图2所示为a 相电流由逆变器流向负载(>0)时死区效应的波形图。
ai gau +gau −an u rael anu rael an u rael anu anu 图2 a 相死区效应波形图(>0) a i Fig.2 Dead-time effect of phase a (>0)a i gau +和ga u −分别为上下两只开关管的驱动信号,两只开关管开通与关断时刻之间的死区时间为。
为不考虑死区时间时的理想输出电压波形,为考虑了外加死区时间时的输出电压波形,为考虑了开关器件开通和关断延迟时间(和)时的输出电压波形,是将开关管和二极管的管压降(和d t idealan u 1real an u 2real an u on t off t 3real an u S u D u )也加以考虑时的输出电压波形。
an u Δ为输出电压的误差电压波形图。
同理可以对<0的情况进行分析。
如果将、、、和a i d t on t off t S u D u 对输出电压产生的影响都进行考虑,则等效死区时间可以表示为:err t sign()()err an d on off avon t i t t t t =+−+ (1) 其中1,0sign()1,0an an an i i i >⎧=⎨−<⎩,为开关管和二极管的平均通态管压降产生的等效误差时间:avon t ,0,0on S off Dan dcavonoff D on S an dc t u t u i u t t u t u i u +⎧>⎪⎪=⎨+⎪<⎪⎩(2) 实际输出相电压与理想输出相电压的一个周期内的平均误差电压an u 可以表示为:errerr dcst u u T = (3) 3 死区补偿方法3.1 误差补偿电压矢量的确定采用平均死区时间补偿法进行补偿,通过以上分析可以确定三相静止轴系中的误差电压,则两相静止轴系中的误差电压可以通过坐标变换来计算:11122022an bn cn u u u u u αβ⎤Δ⎡⎤−−⎥Δ⎡⎤⎢=Δ⎢⎥⎢Δ⎣⎦⎢⎥Δ−⎣⎦⎣⎦⎥⎥ (4) 在两相静止轴系中,误差电压矢量可以用图3表示,误差电压矢量取决于电流矢量角,可以将两相静止电流轴系平面分为6个扇区,每个扇区对应一个误差电压矢量。
于是可以得到在两相静止轴系中补偿电压与电流矢量角的关系如表1所示。
3.2 电流极性的判断方法补偿电压取决于三相电流的极性,如果通过直接检测三相电流来判断电流极性,在零点附近会有较大误差,容易引起误补偿。
由于和为直流量,d i q i图3 两相静止轴系中的误差电压矢量 Fig.3 Error-voltage vector in two-phase stationaryscheme表1 电流矢量与补偿电压的关系Tab.1 Relation of current vector to compensation voltageSector a ib ic i 1dcom u 1qcom u Ⅰ + - -43err u 0Ⅱ + + - 23err u err Ⅲ - + -23err u − errⅣ - + +43err u − 0Ⅴ - - + 23err u − err Ⅵ+ - +23err u err可通过一个简单的一阶低通滤波器来滤除高次谐波成分,再由滤波后的和来判断电流的极性。
df i qf i 同步旋转轴系的电流和经过坐标反变换可以得到两相静止坐标系下电流矢量的幅值和相位角:df i qf i cos cos sin sin sin cos df i s qf i i i t t I i i t t αβθωωθωω−⎡⎤⎡⎤⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎥ (5) 根据所计算得到的电流矢量角i θ,可以在两相静止坐标系中判断电流矢量所处的扇区,这样就可以根据表1来确定所需的补偿电压矢量。
3.3 零电流钳位效应消除策略为了提高死区补偿效果,有必要对电流过零点的钳位现象进行分析,采取有效措施将其消除。
图4为a 相电流由正向往负向过渡时,由于死区时间引起电流与电压波形的偏差。
在死区时间内,当减小到零时,由于同一桥臂的两只开关管都处于关断的状态,使得失去开关管的控制而出现了偏差(此时等于a 相反电动势),这将阻碍朝反方向变化而钳位在零点。
当电机低转速运行时,输出电压较低,这种现象可能持续几个采样周期,从而产生了明显的零电流钳位效应。