1-1 直角坐标系中的运动
- 格式:ppt
- 大小:1.35 MB
- 文档页数:20
初二数学直角坐标系动点问题
问题描述
在数学学习中,直角坐标系是一个非常重要的概念。
通过直角坐标系,我们可
以很好地描述点的位置和运动。
在初二数学中,掌握直角坐标系动点问题是必不可少的一环。
本文将通过几个具体例子来介绍初二数学直角坐标系动点问题。
例题1
问题:在直角坐标系中,点A(3,4)围绕原点顺时针旋转90度,求旋转后的坐标。
解析:顺时针旋转90度相当于将点(x,y)变为(-y,x)。
因此,点A(3,4)围绕原点
顺时针旋转90度后的坐标为(-4,3)。
例题2
问题:在直角坐标系中,点B(1,2)绕原点逆时针旋转60度,求旋转后的坐标。
解析:逆时针旋转60度相当于将点(x,y)变为$(\\frac{x}{2}-
\\frac{\\sqrt{3}}{2}y, \\frac{\\sqrt{3}}{2}x+\\frac{y}{2})$。
因此,点B(1,2)绕原
点逆时针旋转60度后的坐标为$(\\frac{1}{2}-\\sqrt{3},\\sqrt{3}+1)$。
例题3
问题:直线y=2x与y=2-x相交于点C,请问点C的坐标是多少?
解析:点C是直线y=2x与y=2-x的交点,即满足方程2x=2−x,解得x=1,代入任意一个方程可得y=2。
所以点C的坐标为(1, 2)。
总结
通过以上例题的解析,我们了解了初二数学中直角坐标系动点问题的一些基本
概念和解题方法。
在学习数学时,通过练习多个实例可以帮助我们更好地掌握知识,提高解题能力。
希望本文对初二数学直角坐标系动点问题的学习有所帮助。
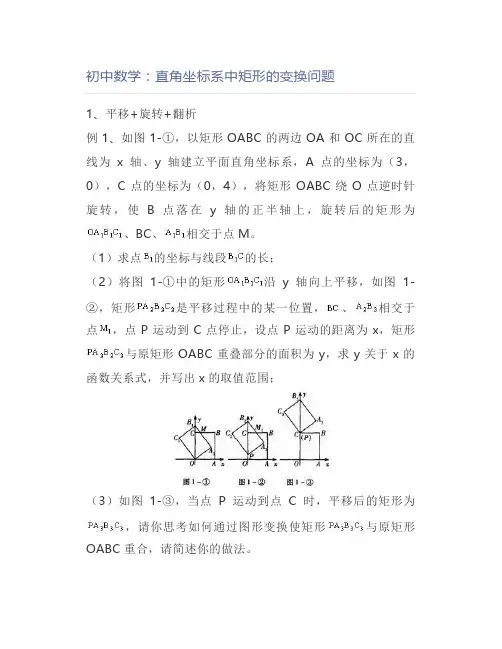
初中数学:直角坐标系中矩形的变换问题1、平移+旋转+翻析例1、如图1-①,以矩形OABC的两边OA和OC所在的直线为x轴、y轴建立平面直角坐标系,A点的坐标为(3,0),C点的坐标为(0,4),将矩形OABC绕O点逆时针旋转,使B点落在y轴的正半轴上,旋转后的矩形为、BC、相交于点M。
(1)求点的坐标与线段的长;(2)将图1-①中的矩形沿y轴向上平移,如图1-②,矩形是平移过程中的某一位置,、相交于点,点P运动到C点停止,设点P运动的距离为x,矩形与原矩形OABC重叠部分的面积为y,求y关于x的函数关系式,并写出x的取值范围;(3)如图1-③,当点P运动到点C时,平移后的矩形为,请你思考如何通过图形变换使矩形与原矩形OABC重合,请简述你的做法。
分析:第(1)问由勾股定理得的长,从而求出点的坐标,已知线段OC的长,继而求出线段的长。
第(2)问在矩形的整个平移过程中,矩形与原矩形OABC重叠图形由四边形(当点从开始位置平移到矩形OABC的边BC上时)变为三角形(当点从矩形OABC的边BC上到运动停止时),求出对应图形在对应条件下自变量x的取值范围及重叠部分的面积。
第(3)问具有开放性,可直接通过图形沿某一条直线翻折得到,或先旋转再平移得到,或先旋转再翻折得到,或先平移再旋转得到。
解:(1)如图1-①,因为,所以点的坐标为(0,5)。
(2)在矩形沿y轴向上平移到P点与C点重合的过程中,点运动到矩形OABC的边BC上时,求得P点移动的距离。
当自变量x的取值范围为时,如图1-②,由△∽△,得,此时,,即,当自变量x的取值范围为时,求得。
(3)①把矩形沿∠的角平分线所在直线对折。
或②把矩形绕C点顺时针旋转,使点与点B重合,再沿y轴向下平移4个单位长度。
或③把矩形绕C点顺时针旋转,使点与点B重合,再沿BC所在的直线对折。
或④把矩形沿y轴向下平移4个单位长度,再绕O点顺时针旋转,使点与点A重合。
2、旋转例2、如图2,在平面直角坐标系xOy中,把矩形COAB绕点C顺时针旋转角,得到矩形CFED。
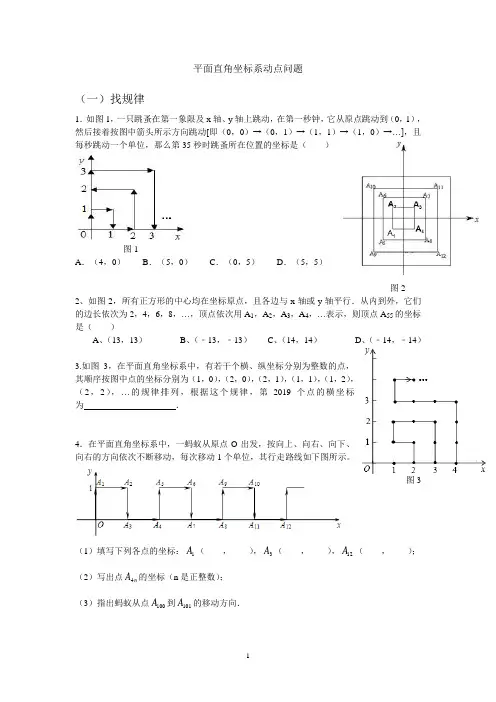
平面直角坐标系动点问题(一)找规律1.如图1,一只跳蚤在第一象限及x 轴、y 轴上跳动,在第一秒钟,它从原点跳动到(0,1),然后接着按图中箭头所示方向跳动[即(0,0)→(0,1)→(1,1)→(1,0)→…],且每秒跳动一个单位,那么第35秒时跳蚤所在位置的坐标是( )图1A .(4,0)B .(5,0)C .(0,5)D .(5,5)图22、如图2,所有正方形的中心均在坐标原点,且各边与x 轴或y 轴平行.从内到外,它们的边长依次为2,4,6,8,…,顶点依次用A 1,A 2,A 3,A 4,…表示,则顶点A 55的坐标是( ) A 、(13,13) B 、(﹣13,﹣13) C 、(14,14) D 、(﹣14,﹣14)3.如图3,在平面直角坐标系中,有若干个横、纵坐标分别为整数的点,其顺序按图中点的坐标分别为(1,0),(2,0),(2,1),(1,1),(1,2),(2,2),…的规律排列,根据这个规律,第2019个点的横坐标为 .4.在平面直角坐标系中,一蚂蚁从原点O 出发,按向上、向右、向下、向右的方向依次不断移动,每次移动1个单位,其行走路线如下图所示。
图3(1)填写下列各点的坐标:1A (____,____),3A (____,____),12A (____,____); (2)写出点n A 4的坐标(n 是正整数); (3)指出蚂蚁从点100A 到101A 的移动方向.5.观察下列有序数对:(3,﹣1)(﹣5,)(7,﹣)(﹣9,)…根据你发现的规律,第100个有序数对是 .6、观察下列有规律的点的坐标:依此规律,A 11的坐标为 ,A 12的坐标为 .7、以0为原点,正东,正北方向为x 轴,y 轴正方向建立平面直角坐标系,一个机器人从原点O 点出发,向正东方向走3米到达A 1点,再向正北方向走6米到达A 2,再向正西方向走9米到达A 3,再向正南方向走12米到达A 4,再向正东方向走15米到达A 5,按此规律走下去,当机器人走到A 6时,A 6的坐标是 .8、如图,将边长为1的正三角形OAP 沿x 轴正方向连续翻转2019次,点P 依次落在点201921,,,P P P 的位置,则点2019P 的横坐标为 .9、如图,在平面直角坐标系上有个点P (1,0),点P 第1次向上跳动1个单位至点P 1(1,1),紧接着第2次向左跳动2个单位至点P 2(﹣1,1),第3次向上跳动1个单位,第4次向右跳动3个单位,第5次又向上跳动1个单位,第6次向左跳动4个单位,…,依此规律跳动下去,点P 第100次跳动至点P 100的坐标是 .点P 第2019次跳动至点P 2019的坐标是 .图4 图5 10、如图5,已知A l (1,0),A 2(1,1),A 3(﹣1,1),A 4(﹣1,﹣1),A 5(2,﹣1),….则点A 2019的坐标为 .1PAOyxP1. 如图,一个粒子在第一象限内及x 、y 轴上运动,在第一分钟内它从原点运动到()1,0,而后它接着按图所示在x 轴、y 轴平行的方向上来回运动,且每分钟移动1个长度单位,那么,在1989分钟后这个粒子所处的位置是( ).A .()35,44B .()36,45C .()37,45D .()44,352. 如果将点P 绕定点M 旋转180︒后与点Q 重合,那么称点P 与点Q 关于点M 对称,定点M 叫做对称中心,此时,点M 是线段PQ 的中点,如图,在直角坐标系中,ABO △的顶点A 、B 、O 的坐标分别为()1,0、()0,1、()0,0,点1P ,2P ,3P ,…中相邻两点都关于ABO △的一个顶点对称,点1P 与点2P 关于点A 对称,点2P 与点3P 关于点B 对称,点3P 与点4P 关于点O 对称,点4P 与点5P 关于点A 对称,点5P 与点6P 关于点B 对称,点6P 与点7P 关于点O 对称,…对称中心分别是A ,B ,O ,A ,B ,O ,…且这些对称中心依次循环,已知1P 的坐标是()1,1.试写出点2P 、7P 、100P 的坐标.3. 如图,在平面直角坐标系中,四边形各顶点的坐标分别为:()0,0A ,()7,0B ,()9,5C ,()2,7D .(1)求此四边形的面积.(2)在坐标轴上,你能否找到一点P ,使50PBC S =△?若能,求出P 点坐标;若不能,请说明理由.4. 如图①,已知OABC 是一个长方形,其中顶点A 、B 的坐标分别为()0,a 和()9,a ,点E在AB 上,且13AE AB =,点F 在OC 上,且13OF OC =.点G 在OA 上,且使GEC △的面积为20,GFB △的面积为16,试求a 的值.图②5. 如图,在平面直角坐标系中,有若干个横坐标分别为整数的点,其顺序按图中“→”方向排列,如()1,0,()2,0,()2,1,()1,1,()1,2,()2,2……根据这个规律,第2019个点的横坐标为_______.6. 在平面直角坐标系xOy 中,我们把横、纵坐标都是整数的点叫做整点.已知点()0,4A ,点B 是x 轴正半轴上的整点,记AOB △内部(不包括边界)的整点个数为m ,当3m =时,点B 的横坐标的所有可能值是_______;当点B 的横坐标为4n (n 为正整数)时,m =________(用含n 的代数式表示).7. 如图,把自然数按图的次序排在直角坐标系中,每个自然数都对应着一个坐标.如1的对应点是原点()0,0,3的对应点是()1,1,16的对应点是()1,2-,那么2019的对应点的坐标是_______.8.如图,长方形BCDE 的各边分别平行于x 轴或y 轴,物体甲和物体乙由点()2,0A 同时出发,沿长方形BCDE 的边作环绕运动,物体甲按逆时针方向以每秒1个单位长度的速度匀速运动,物体乙按顺时针方向以每秒2个单位长度的速度匀速运动,求两个物体开始运动后的第2019次相遇地点的坐标.9. 在平面直角坐标系中,如图①,将线段AB 平移至线段CD ,连接AC 、BD . (1)直接写出图中相等的线段、平行的线段; (2)已知()3,0A -、()2,2B --,点C 在y 轴的正半轴上.点D 在第一象限内,且5ACD S =△,求点C 、D 的坐标;(3)如图②,在平面直角坐标系中,已知一定点,()1,0M ,两个动点(),21E a a +、(),23F b b -+,请你探索是否存在以两个动点E 、F 为端点的线段EF 平行于线段OM 且等于线段OM .若存在,求以点O 、M 、E 、F 为顶点的四边形的面积,若不存在,请说明理由.图②10 . 如图,AOCD 是放置在平面直角坐标系内的梯形,其中O 是坐标原点.点A 、C 、D 的坐标分别为()0,8,()5,0,()3,8,若点P 在梯形内,且PAD POC S S =△△,PAO PCD S S =△△,求P 点的坐标.11. 操作与研究(1)对数轴上的点P 进行如下操作:先把点P 表示的数乘以13,再把所得数对应的点向右平移1个单位,得到点P 的对应点'P B .点A ,B 在数轴上,对线段AB 上的每个点进行上述操作后得到线段''A B ,其中点A ,B 的对应点分别为'A ,'B .如图①,若点A 表示的数是3-,则点'A 表示的数是______;若点'B 表示的数是2,则点表示的数是______;已知线段AB 上的点E 经过上述操作后得到的对应点'E 与点E 重合,则点E 表示的数是_________.(2)如图②,在平面直角坐标系xOy 中,对正方形ABCD 及其内部的每个点进行如下操作:把每个点的横、纵坐标都乘以同一个实数a ,将得到的点先向右平移m 个单位,再向上平移n 个单位()0,0m n >>,得到正方形''''A B C D 及其内部的点,其中点A ,B 的对应点分别为'A ,'B .已知正方形ABCD 内部的一个点F 经过上述操作后得到的对应点'F 与点F 重合,求点F 的坐标.图①A B'-1-2-3-412340图②(二)几何综合问题1、已知点A 的坐标是(3,0)、AB=5,(1)当点B 在X 轴上时、求点B 的坐标、(2)当AB//y 轴时、求点B 的坐标2、如图,已知A 、B 两村庄的坐标分别为(2,2)、(7,4),一辆汽车在x 轴上行驶,从原点O 出发.(1)汽车行驶到什么位置时离A 村最近?写出此点的坐标. (2)汽车行驶到什么位置时离B 村最近?写出此点的坐标. (3)请在图中画出汽车行驶到什么位置时,距离两村的和最短?4.如图,在平面直角坐标系中,点A ,B 的坐标分别为(-1,0),(3,0),现同时将点A ,B 分别向上平移2个单位,再向右平移1个单位,分别得到点A ,B 的对应点C ,D ,连接AC ,BD ,CD .(1)求点C ,D 的坐标及四边形ABDC 的面积ABDC S 四边形D C 3-1BA O x y PDCBAOx y (2)在y 轴上是否存在一点P ,连接PA ,PB ,使PAB S ∆=ABDC S 四边形,若存在这样一点,求出点P 的坐标,若不存在,试说明理由.(3)点P 是线段BD 上的一个动点,连接PC ,PO ,当点P 在BD 上移动时(不与B ,D 重合)给出下列结论:①DCP BOP CPO ∠+∠∠的值不变,②DCP CPOBOP∠+∠∠的值不变,其中有且只有一个是正确的,请你找出这个结论并求其值.5.已知:在平面直角坐标系中,四边形ABCD 是长方形, ∠A =∠B =∠C =∠D =90°,AB ∥CD ,AB =CD =8cm ,AD =BC =6cm ,D 点与原点重合,坐标为(0,0). (1)写出点B 的坐标.(2)动点P 从点A 出发以每秒3个单位长度的速度向终点B 匀速运动, 动点Q 从点C 出发以每秒4个单位长度的速度沿射线CD 方向匀速运动,若P ,Q 两点同时出发,设运动时间为t 秒,当t 为何值时,PQ ∥BC ?(3)在Q 的运动过程中,当Q 运动到什么位置时,使△ADQ 的面积为9? 求出此时Q 点的坐标.6.如图在平面直角坐标系中,A(a,0),B(b,0),(﹣1,2).且|2a+b+1|+=0.(1)求a、b的值;(2)①在y轴的正半轴上存在一点M,使S△COM=S△ABC,求点M的坐标.②在坐标轴的其他位置是否存在点M,使S△COM=S△ABC仍成立?若存在,请直接写出符合条件的点M的坐标.7.如图,在下面的直角坐标系中,已知A(0,a),B(b,0),C(b,4)三点,其中a,b 满足关系式.(1)求a,b的值;(2)如果在第二象限内有一点P(m,),请用含m的式子表示四边形ABOP的面积;(3)在(2)的条件下,是否存在点P,使四边形ABOP的面积与△ABC的面积相等?若存在,求出点P的坐标;若不存在,请说明理由.8.在平面直角坐标系中,点A(a,b)是第四象限内一点,AB⊥y轴于B,且B(0,b)是y轴负半轴上一点,b2=16,S△AOB=12.(1)求点A和点B的坐标;(2)如图1,点D为线段OA(端点除外)上某一点,过点D作AO垂线交x轴于E,交直线AB于F,∠EOD、∠AFD的平分线相交于N,求∠ONF的度数.(3)如图2,点D为线段OA(端点除外)上某一点,当点D在线段上运动时,过点D作直线EF交x轴正半轴于E,交直线AB于F,∠EOD,∠AFD的平分线相交于点N.若记∠ODF=α,请用α的式子表示∠ONF的大小,并说明理由.。
平面内直角坐标系中坐标旋转变换公式平面内的坐标旋转变换公式可以通过向量旋转的方式进行推导和表示。
在直角坐标系中,设有一个平面点P(x, y),其绕原点O逆时针旋转θ角度后的新坐标为P'(x', y')。
为了推导出坐标旋转变换公式,我们可以利用向量的旋转表达式来推导。
首先,我们将点P(x, y)表示为位于原点O(0, 0)到点P(x, y)的向量r = OP。
同理,点P'(x', y')可表示为向量r' = OP'。
然后,我们利用向量的旋转表达式来表示矢量r',即:r' = r • R,其中R为旋转矩阵。
在平面内的逆时针旋转θ角度的旋转矩阵为:R = |cosθ -sinθ||sinθ cosθ|将向量r表示为坐标形式,则有:r = (x, y)将旋转矩阵R和向量r代入旋转表达式中,就可以得到点P'的坐标表示:(x', y') = (x, y) • |cosθ -sinθ||sinθ cosθ|根据矩阵乘法的定义,可以得到:x' = x • cosθ - y • sinθy' = x • sinθ + y • cosθ综上所述,平面内的坐标旋转变换公式为:x' = x • cosθ - y • sinθy' = x • sinθ + y • cosθ这个公式表示了坐标旋转变换的关系,可以使用这个公式将原平面上的点P(x, y)绕原点逆时针旋转θ角度后,得到新的坐标P'(x', y')。
在具体应用中,可以使用这个公式来进行坐标旋转变换。
例如,在计算机图形学中,可以使用这个公式将图像绕指定点进行旋转;在机器人学中,可以使用这个公式计算机器人末端执行器的位置;在仿真实验中,可以使用这个公式模拟物体的运动等等。
总之,坐标旋转变换公式提供了一种计算平面内点的旋转后坐标的方法,通过对原点到点P的向量进行旋转矩阵的乘法运算,可以计算出点P'的新坐标。
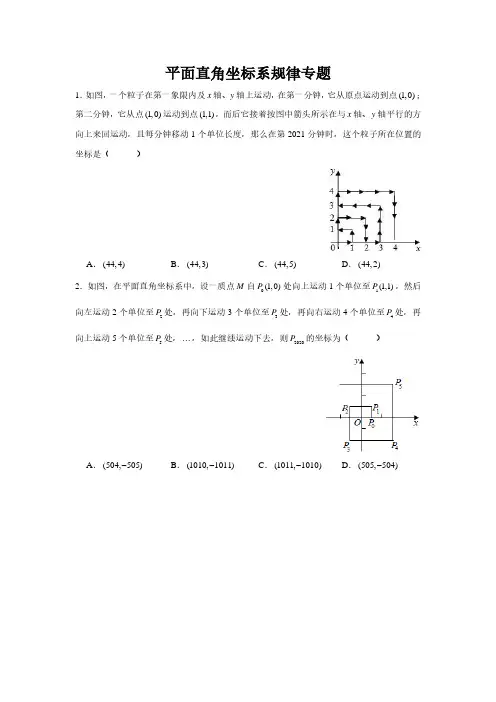
平面直角坐标系规律专题1.如图,一个粒子在第一象限内及x 轴、y 轴上运动,在第一分钟,它从原点运动到点(1,0);第二分钟,它从点(1,0)运动到点(1,1),而后它接着按图中箭头所示在与x 轴、y 轴平行的方向上来回运动,且每分钟移动1个单位长度,那么在第2021分钟时,这个粒子所在位置的坐标是( )A .(44,4)B .(44,3)C .(44,5)D .(44,2)2.如图,在平面直角坐标系中,设一质点M 自0(1,0)P 处向上运动1个单位至1(1,1)P ,然后向左运动2个单位至2P 处,再向下运动3个单位至3P 处,再向右运动4个单位至4P 处,再向上运动5个单位至5P 处,⋯,如此继续运动下去,则2020P 的坐标为( )A .(504,505)−B .(1010,1011)−C .(1011,1010)−D .(505,504)−3.如图,在平面直角坐标系中,边长为1的正方形111OA B C 的两边在坐标轴上,以它的对角线1OB 为边作正方形122OB B C ,再以正方形122OB B C 的对角线2OB 为边作正方形233OB B C ,以此类推⋯、则正方形201920202020OB B C 的顶点2020B 的坐标是( )A .1010(2,0)B .(0,10102)C .1010(0,2)−D .1010(2−,0)4.如图,一机器人从原点出发按图示方向作折线运动,第1次从原点到1(1,0)A ,第2次运动到2(1,1)A ,第3次运动到3(1,1)A −,第4次运动到4(1,1)A −−,第5次运动到5(2,1)A −⋯则第15次运动到的点15A 的坐标是( )A .(4,4)B .(4,4)−C .(4,4)−−D .(5,4)−5.如图,在平面直角坐标系中,O 为坐标原点,点N 在x 轴正半轴上,点1A ,2A ,3A ,…在射线ON 上,点1B ,2B ,3B ,…在射线OM 上,30MON ∠=︒,△112A B A ,△223A B A ,334A B A △,…,为等边三角形,依此类推,若11OA =,则点2020B 的横坐标是( )A .201723⨯B .201823⨯C .201923⨯D .202023⨯6.如图,在平面直角坐标系中,将边长为3,4,5的Rt ABO ∆沿x 轴向右滚动到△11AB C 的位置,再到△112A B C 的位置⋯依次进行下去,发现(3,0)A ,1(12,3)A ,2(15,0)A ⋯那么点10A 的坐标为( )A .(60,3)B .(60,0)C .(63,3)D .(63,0)7.如图,平面直角坐标系中,已知点(1,1)A ,(1,1)B −,(1,2)C −−,(1,2)D −,动点P 从点A 出发,以每秒2个单位的速度按逆时针方向沿四边形ABCD 的边做环绕运动;另一动点Q 从点C 出发,以每秒3个单位的速度按顺时针方向沿四边形CBAD 的边做环绕运动,则第2019次相遇点的坐标是( )A .(1,1)−−B .(1,1)−C .(2,2)−D .(1,2)8.如图,在平面直角坐标系上有点(1,0)A ,点A 第一次跳至点1(1,1)A −,第二次向右跳动3个单位至点2(2,1)A ,第三次跳至点3(2,2)A −,第四次向右跳动5个单位至点4(3,2)A ,…依此规律跳动下去,点A 第100次跳至点100A 的坐标是( )A .(50,50)B .(51,50)C .(50,51)D .(49,50)9.如图,已知点1(1,0)A,2(1,1)A,3(1,1)A−,4(1,1)A−−,5(2,1)A−,…,则点2020A的坐标为()A.(505,505)B.(506,505)−C.(505,505)−−D.(505,505)−10.如图,在平面直角坐标系中,11OA=,将边长为1的正方形一边与x轴重合按图中规律摆放,其中相邻两个正方形的间距都是1,则点2022A的坐标为()A.(1009,1)B.(1010,1)C.(1011,0)D.(1011,1)−11.如图,在48⨯的长方形网格OABC中,动点P从(0,3)出发,沿箭头所示方向运动,每当碰到长方形的边时反弹,反弹时反射角等于入射角,当点P第2020次碰到矩形的边时,点P的坐标为()A.(1,4)B.(5,0)C.(6,4)D.(8,3)12.在平面直角坐标系中,横坐标、纵坐标都为整数的点称为整点,请你观察图中正方形1111A B C D ,2222A B C D ,3333A B C D ,每个正方形四条边上的整点的个数.按此规律推算出正方形20202020A B C D 四条边上的整点的总个数有( )A .152B .156C .160D .16813.如图,在平面直角坐标系中,有若干个整数点,其顺序按图中方向排列,如(1,0),(2,0),(2,1),(3,2),(3,1),(3,0),……,根据这个规律探索可得,第120个点的坐标为( )A .(16,0)B .(15,14)C .(15,0)D .(14,13)14.如图,在平面直角坐标系中,一动点从原点O 出发,按向上,向右,向下,向右的方向不断地移动,每移动一个单位,得到点1(0,1)A ,2(1,1)A ,3(1,0)A ,4(2,0)A ,那么2020A 坐标为( )A .(2020,1)B .(2020,0)C .(1010,1)D .(1010,0)15.如图,在平面直角坐标系上有个点(1,0)A −,点A 第1次向上跳动1个单位至点1(1,1)A −,紧接着第2次向右跳动2个单位至点2(1,1)A ,第3次向上跳动1个单位,第4次向左跳动3个单位,第5次又向上跳动1个单位,第6次向右跳动4个单位,…,依次规律跳动下去,点A 第2019次跳动至点2019A 的坐标是( )A .(505,1009)−B .(505,1010)C .(504,1009)−D .(504,1010)16.如图所示,在平面直角坐标系中,半径均为1个单位的半圆1O ,2O ,3O ,…组成一条平滑的曲线,点P 从原点O 出发,沿这条曲线向右运动,速度为每秒2π个单位长度,则第2018秒时,点P 的坐标是点( )A .(2017,1)B .(2018,0)C .(2017,1)−D .(2019,0)17.如图,动点P 在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2)⋯按这样的运动规律经过第2021次运动后,动点P 的坐标是 .18.在学校,每一位同学都对应着一个学籍号.在数学中也有一些对应.现定义一种对应关系f ,使得数对(,)x y 和数z 是对应的,此时把这种关系记作:(,)f x y z =.对于任意的数m ,()n m n >,对应关系f 由如表给出:(,)x y (,)n n (,)m n (,)n m(,)f x ynm n −m n +如:(1,2)213f =+=,f (2,1)211=−=,f (1,1)1−−=−,则使等式(12,3)2f x x +=成立的x 的值是 .19.按照如图的方式排列,若第一个点为(0,0),则第100个点的坐标为 .20.如图,在平面直角坐标系中,第一次将OAB ∆变换成△11OA B ,第二次将△11OA B 变换成△22OA B ,第三次将△22OA B 变换成△33OA B ,⋯,将OAB ∆进行n 次变换,得到△n n OA B ,观察每次变换中三角形顶点坐标有何变化,找出规律,推测2020A 的坐标是 .。
坐标轴章节知识点总结一、坐标轴的定义坐标轴是一条可以用来表示位置的直线,它将平面分为两部分,分别叫做正半轴和负半轴。
在数学中,我们通常用坐标轴来表示点的位置,坐标轴上有原点,原点是坐标轴的起点,我们用它作为参照点来确定其他点的位置。
坐标轴通常是水平和垂直的两条直线,它们相交在原点处,形成一个直角。
我们可以用坐标轴来表示平面上的点,这个描述点的方法叫做坐标。
坐标通常用有序数对(x,y)来表示,x表示点在水平方向上的位置,y表示点在垂直方向上的位置。
二、基本性质1. 坐标轴的方向性:根据坐标轴的方向,可以确定一个点的位置。
2. 坐标轴的正负性:根据坐标轴的正负性,可以确定一个点在坐标轴的哪一侧。
3. 坐标轴的数值大小:根据坐标轴的数值大小,可以确定一个点在坐标轴上的具体位置。
三、坐标系坐标系是一种用来确定点位置的数学工具,它包括数学坐标系和物理坐标系两种类型。
数学坐标系用来表示数学问题中的点位置,物理坐标系用来表示物理问题中的点位置。
在数学坐标系中,我们通常用直角坐标系和极坐标系来表示点的位置。
四、直角坐标系直角坐标系是平面上最常见的坐标系,它由两条垂直的坐标轴组成,通常分别用x轴和y轴表示。
x轴水平向右为正,向左为负;y轴竖直向上为正,向下为负。
直角坐标系的原点是两条坐标轴的交点,我们用它来作为参照点来确定其他点的位置。
在直角坐标系中,我们可以用有序数对(x,y)来表示点的位置,x表示点在x轴上的位置,y表示点在y轴上的位置。
1. 直角坐标系中的坐标变换在直角坐标系中,我们可以进行坐标变换的操作,包括平移、旋转、对称等操作。
平移是指将点在坐标轴上沿着某个方向移动一定距离,旋转是指将点绕原点旋转一定角度,对称是指将点关于某个点、直线或平面进行对称变换。
在数学中,我们通常用矩阵来表示这些变换的操作,通过矩阵的乘法来实现对点的坐标变换。
2. 直角坐标系中的距离公式在直角坐标系中,我们可以通过两点的坐标来计算它们之间的距离。
平面直角坐标系动点问题一、引言平面直角坐标系是数学中非常基础的概念,它可以用来描述二维空间中的点和图形。
在平面直角坐标系中,我们可以通过坐标轴上的数值来确定一个点的位置。
而动点问题则是将平面直角坐标系与运动学相结合,用于描述物体在平面内运动过程中的位置变化。
二、基本概念1. 平面直角坐标系平面直角坐标系由两条互相垂直的数轴组成,分别称为x轴和y轴。
它们交于原点O,并且每个点都可以用一个有序数对(x, y)来表示。
2. 动点动点是指在平面内移动的一个点,它可以沿着任意路径运动,并且在不同时间处于不同位置。
3. 运动学运动学是研究物体在空间中运动状态和规律的学科。
它包括了物体位置、速度、加速度等概念。
三、平面直角坐标系与动点问题1. 平移运动平移运动是指物体沿着一条直线或曲线路径做匀速运动,在这种情况下,我们可以通过简单地改变物体在x轴和y轴上的坐标来描述它的位置变化。
例如,一个物体从点A沿着直线运动到点B,我们可以通过改变x轴和y轴上的坐标来描述这个过程。
设A的坐标为(x1, y1),B的坐标为(x2, y2),则在t时刻物体的位置可以表示为:x = x1 + (x2 - x1) * ty = y1 + (y2 - y1) * t其中t表示时间,它的取值范围通常是0到1。
2. 旋转运动旋转运动是指物体绕固定点或者绕自身中心做圆周运动,在这种情况下,我们需要使用极坐标系来描述物体的位置。
极坐标系由极轴和极角两个参数组成,其中极轴表示物体到原点O的距离,而极角表示物体与x轴之间的夹角。
在旋转运动中,我们通常会使用弧度制来表示角度。
例如,一个物体以原点O为中心顺时针旋转α角度后到达点P,则P 的极坐标可以表示为:r = OP = √(x^2 + y^2)θ = α其中r表示距离原点O的距离,而θ表示与x轴之间的夹角。
3. 抛射运动抛射运动是指物体在空中做抛体运动,它的轨迹通常是一个抛物线。
在这种情况下,我们需要使用二元二次方程来描述物体的位置。
平面直角坐标系综合讲义一、【知识点拨】1.坐标平面内的点与有序实数对一一对应;2.点P (a ,b )到x 轴的距离为│b │,• 到y 轴距离为│a │, 到原点距离为22a b +;3.各象限内点的坐标的符号特征:P (a ,b ), P 在第一象限⇔a>0且b>0, P 在第二象限⇔a<0,b>0, P 在第三象限⇔a<0,b<0, P 在第四象限⇔a>0,b<0;4.点P (a ,b ):若点P 在x 轴上⇔a 为任意实数,b=0;P 在y 轴上⇔a=0,b 为任意实数;P 在一,三象限坐标轴夹角平分线上⇔a=b ; P 在二,四象限坐标轴夹角平分线上⇔a=-b ; 5.点A (x 1,y 1),B (x 1,y 2):A ,B 关于x 轴对称⇔x 1=x 2,y 1=-y 2; A 、B 关于的y 轴对称⇔x 1=-x 2,y 1=y 2; A ,B 关于原点对称⇔x 1=-x 2,y 1=-y 2; AB ∥x 轴⇔y 1=y 2且x 1≠x 2;AB ∥y 轴⇔x 1=x 2且y 1≠y 2(A ,B 表示两个不同的点). 6点的平移:在平面直角坐标系中,教师寄语:对那些有自信心而不介意于暂时成败的人,没有所谓失败!对怀着百折不挠的坚定意志的人,没有所谓失败!对别人放手,而他仍然坚持;别人后退,而他仍然前冲的人,没有所谓失败!对每次跌倒,而立刻站起来;每次坠地,反会像皮球一样跳得更高的人,没有所谓失败!——雨果将点(x,y)向右平移a个单位长度,可以得到对应点(x+a ,y);将点(x,y)向左平移a个单位长度,可以得到对应点(x-a,y)将点(x,y)向上平移b个单位长度,可以得到对应点(x,y+b);将点(x,y)向下平移b个单位长度,可以得到对应点(x,y-b)。
二、【例题评析】例1(2011贵州贵阳,10分)【阅读】在平面直角坐标系中,以任意两点P(x1,y1)、Q(x2,y2)为端点的线段中点坐标为(x1+x22,y1+y22).【运用】如图,矩形ONEF的对角线交于点M,ON、OF分别在x轴和y轴上,O为坐标原点,点E的坐标为(4,3),则点M的坐标为______;例2,在直角坐标系中,点A,B的坐标分别是(0,6),(-8,0),求Rt△ABO 的内心的坐标.三【综合能力训练】1.如图所示,在平面直角坐标系中,点A的坐标是(10,0),•点B的坐标为(8,0),点C,D在以OA为直径的半圆M上,且四边形OCDB是平行四边形,•求点C的坐标.2.如图所示,在直角坐标系中,矩形ABCD的边AD在x轴上,•点A在原点,AB=3,AD=5,矩形以每秒2个单位长度沿x轴正方向做匀速运动.同时点P从A点出发以每秒1个单位长度沿A─B─C─D的路线做匀速运动.当P点运动到D点时停止运动,矩形ABCD也随之停止运动.(1)求P点从A点运动到D点所需的时间;(2)设P点运动时间为t(s);①当t=5时,求出点P的坐标;②若△DAP的面积为S,试求出S与t之间的函数关系式(并写出相应的自变量t•的取值范围).3.将一矩形纸片OABC放在直角坐标系中,O为原点,C在x轴上,•OA=6,OC=10.(1)如图所示,在OA上取一点E,将△EOC沿EC折叠,使O点落在AB 边上的D点,求E点的坐标;(2)如图所示,将矩形变为矩形OA′B′C′,在OA′,OC′边上选择取适当的点E′,F′,将△E′OF沿E′F折叠,使O点落在A′B′边上的D′点,过D′作D′G•∥A′O交E′F于T点,交OC′于G点,求证:TG=A′E′.(3)在图的条件下,设T(x,y):探求:y与x之间的函数关系式。
图形在坐标系中的平移-重难点题型【北师大版】【知识点1 点在坐标系中的平移】平面直角坐标内点的平移规律,设a >0,b >0(1)一次平移:P (x ,y ) P '(x +a ,y )P (x ,y ) P '(x ,y -b )(2)二次平移: 【题型1 点在坐标系中的平移】 【例1】(2021春•开福区校级期中)在平面直角坐标系中,将点A (x ,y )向左平移3个单位长度,再向上平移5个单位长度后与点B (﹣3,2)重合,则点A 的坐标是( )A .(2,5)B .(0,﹣3)C .(﹣2,5)D .(5,﹣3) 【变式1-1】(2021春•重庆期中)在平面直角坐标系中,点A (m ,n )经过平移后得到的对应点A ′(m +3,n ﹣4)在第二象限,则点A 所在的象限是( )A .第一象限B .第二象限C .第三象限D .第四象限【变式1-2】(2021春•江夏区期末)已知△ABC 内任意一点P (a ,b )经过平移后对应点P 1(a +2,b ﹣6),如果点A 在经过此次平移后对应点A 1(4,﹣3),则A 点坐标为( )A .(6,﹣1)B .(2,﹣6)C .(﹣9,6)D .(2,3)【变式1-3】(2021春•新罗区期末)在平面直角坐标系中,将A (n 2,1)沿着x 的正方向向右平移3+n 2个单位后得到B 点.有四个点M (﹣2n 2,1)、N (3n 2,1)、P (n 2,n 2+4)、Q (n 2+1,1),一定在线段AB 上的是( )A .点MB .点QC .点PD .点N【知识点2 图形在坐标系中的平移】 P (x ,y ) P (x - a ,y +b )向左平移a 个单位 再向上平移b 个单向下平移b 个单位向右平移a 个单位在平面直角坐标系内,把一个图形各个点的横坐标都加上(或减去)一个整数a,相应的新图形就是把原图形向右(或向左)平移a个单位长度;如果把它各个点的纵坐标都加(或减去)一个整数a,相应的新图形就是把原图形向上(或向下)平移a个单位长度.(即:横坐标,右移加,左移减;纵坐标,上移加,下移减.)【题型2 图形在坐标系中的平移】【例2】(2021春•深圳校级期中)如图,△ABC经过一定的平移得到△A′B′C′,如果△ABC上的点P的坐标为(a,b),那么这个点在△A′B′C′上的对应点P′的坐标为()A.(a﹣2,b﹣3)B.(a﹣3,b﹣2)C.(a+3,b+2)D.(a+2,b+3)【变式2-1】(2021•邛崃市模拟)如图,在平面直角坐标系中,已知点M(2,1),N(1,﹣1),平移线段MN,使点M落在点M'(﹣1,2)处,则点N对应的点N'的坐标为()A.(﹣2,0)B.(0,﹣2)C.(﹣1,1)D.(﹣3,﹣1)【变式2-2】(2021春•东湖区期末)如图,点A、B的坐标分别是为(﹣3,1),(﹣1,﹣2),若将线段AB平移至A1B1的位置,A1与B1坐标分别是(m,4)和(3,n),则线段AB在平移过程中扫过的图形面积为()A.18B.20C.28D.36【变式2-3】(2020春•凉州区校级期中)如图,在平面直角坐标系中,点A的坐标为(2,0),点B的坐标为(0,1),将线段AB平移,使其一个端点到C(3,2),则平移后另一端点的坐标为()A.(1,3)B.(5,1)C.(1,3)或(3,5)D.(1,3)或(5,1)【题型3 图形在网格中的平移变换】【例3】(2021春•锦江区校级月考)如图,三角形A'B'C'是由三角形ABC经过某种平移得到的,点A与点A',点B与点B',点C与点C'分别对应,且这六个点都在格点上,观察各点以及各点坐标之间的关系,解答下列问题:(1)分别写出点B和点B'的坐标,并说明三角形A'B'C'是由三角形ABC经过怎样的平移得到的.(2)连接BC',直接写出∠CBC'与∠B'C'O之间的数量关系.(3)若点M(a﹣1,2b﹣5)是三角形ABC内一点,它随三角形ABC按(1)中方式平移后得到的对应点为点N(2a﹣7,4﹣b),求a和b的值.【变式3-1】(2020春•江汉区月考)如图,三角形A′B′C′是由三角形ABC经过某种平移得到的,点A与点A′,点B与点B′,点C与点C′分别对应,且这六个点都在格点上,观察各点以及各点坐标之间的关系,解答下列问题:(1)分别写出点B和点B′的坐标,并说明三角形A′B′C′是由三角形ABC经过怎样的平移得到的;(2)连接BC′,直接写出∠CBC′与∠B′C′O之间的数量关系;(3)若点M(a﹣1,2b﹣5)是三角形ABC内一点,它随三角形ABC按(1)中方式平移后得到的对应点为点N(2a﹣7,4﹣b),求a和b的值.【变式3-2】(2020春•江岸区校级月考)在如图的直角坐标系中,将△ABC平移后得到△A′B′C′,它们的三个顶点坐标如表所示:△ABC A(a,0)B(5,3)C(2,1)△A′B′C′A′(3,4)B′(7,b)C′(c,d)(1)观察表中各对应点坐标的变化,并填空:△ABC向右平移个单位长度,再向上平移个单位长度可以得到△A′B′C′;a=,b=.(2)求出线段AB在整个平移的过程中在坐标平面上扫过的面积.(3)若点M(m,n)为线段AB上的一点,则m、n满足的关系式是.【变式3-3】(2020春•金乡县期末)在平面直角坐标系中,点A的坐标为(0,4),线段MN的位置如图所示,其中点M的坐标为(﹣3,﹣1),点N的坐标为(3,﹣2).(1)将线段MN平移得到线段AB,其中点M的对应点为A,点N的对应点为B.①点M平移到点A的过程可以是:先向平移个单位长度,再向平移个单位长度;②点B的坐标为;(2)在(1)的条件下,若点C的坐标为(4,0),连接AC,BC,求△ABC的面积.(3)在y轴上是否存在点P,使以A、B、P三点为顶点的三角形的面积为3,若存在,请直接写出点P的坐标;若不存在,请说明理由.【题型4 坐标系内的平移变换与角度计算综合】【例4】(2020春•通山县期末)如图,在平面直角坐标系中,点A(2,6),B(4,3),将线段AB进行平移,使点A刚好落在x轴的负半轴上,点B刚好落在y轴的负半轴上,A,B的对应点分别为A',B',连接AA'交y轴于点C,BB'交x轴于点D.(1)线段A'B'可以由线段AB经过怎样的平移得到?并写出A',B'的坐标;(2)求四边形AA'B'B的面积;(3)P为y轴上的一动点(不与点C重合),请探究∠PCA′与∠A'DB'的数量关系,给出结论并说明理由.【变式4-1】(2021春•庆阳期末)如图①,在平面直角坐标系中,点A、B的坐标分别为(﹣1,0),(3,0),现同时将点A、B向上平移2个单位长度,再向右平移1个单位长度,得到A、B的对应点C、D,连接AC、BD、CD.(1)直接写出点C、D的坐标;(2)如图②,点P是线段BD上的一个动点,连接PC、PO,当点P在线段BD上运动时,试探究∠OPC、∠PCD、∠POB的数量关系,并证明你的结论.【变式4-2】(2020春•大同期末)综合与实践问题背景如图,在平面直角坐标系中,点A的坐标为(﹣3,5),点B的坐标为(0,1),点C 的坐标为(4,5),将线段AB沿AC方向平移,平移距离为线段AC的长度.动手操作(1)画出AB平移后的线段CD,直接写出B的对应点D的坐标;探究证明(2)连接BD,试探究∠BAC,∠BDC的数量关系,并证明你的结论;拓展延伸(3)若点E在线段BD上,连接AD,AE,且满足∠EAD=∠CAD,请求出∠ADB:∠AEB的值,并写出推理过程.【变式4-3】(2020春•鞍山期末)如图,在平面直角坐标系中,点A的坐标是(﹣1,0),点B的坐标是(4,0),现将线段AB向右平移一个单位,向上平移4个单位,得到线段CD,点P是y轴上的动点,连接BP;(1)当点P在线段OC上时(如图一),判断∠CPB与∠PBA的数量关系;(2)当点P在OC所在的直线上时,连接DP(如图二),试判断∠DPB与∠CDP,∠PBA之间的数量关系,请直接写出结论.。

初中数学平面直角坐标系知识点平面直角坐标系是数学中的一个重要概念,通过它可以方便地描述和研究平面内点的位置关系和运动规律。
了解平面直角坐标系的知识点对于初中数学的学习非常重要,下面将介绍一些平面直角坐标系的基本知识点。
一、平面直角坐标系的概念及建立平面直角坐标系是由两个相互垂直的数轴组成的,这两个数轴分别叫做x轴和y轴。
x轴和y轴的交点称为坐标原点O,x轴的正方向称为正半轴,负方向称为负半轴;y轴的正方向也是正半轴,负方向是负半轴。
所有的点在平面中都可以用坐标表示,一个点的坐标就是它到x轴和y轴的距离表示的有序数对。
二、坐标的表示方法对于一个点P,我们可以用(x,y)来表示它的坐标,x是点P在x轴上的坐标值,y是点P在y轴上的坐标值。
例如,点A的坐标为(3,4),表示它到x轴的距离为3,到y轴的距离为4三、坐标的表示及性质1.坐标的图示表示:在平面直角坐标系中,一般使用平行于坐标轴的线段来表示坐标,例如,点A的坐标为(3,4),我们可以在x轴上向右边移动3个单位,然后在y轴上向上移动4个单位,将这两个点连接起来,就得到了点A的位置。
2.坐标的唯一性:对于平面上的每个点,它的坐标值是唯一确定的,即不同的点不可能有相同的坐标。
3.单位长度和比例关系:在平面直角坐标系中,单位长度是可以任意确定的,通常我们用等长的单位长度来表示x轴和y轴。
这样,两个单位长度的线段的数量关系就可以表示为1:1的比例关系。
四、点的位置关系在平面直角坐标系中,可以通过坐标的大小和正负来判断点的位置关系。
1.同一点的位置:在平面直角坐标系中,原点O的坐标是(0,0),即到x轴和y轴的距离都是0,因此原点是唯一的。
2.直线与坐标轴的交点:一个点的y坐标为0,表示它在x轴上,这样的点叫做x轴的交点;一个点的x坐标为0,表示它在y轴上,这样的点叫做y轴的交点。
3.点的位置比较:对于两个不同的点,可以通过比较它们的x坐标和y坐标的大小来判断它们的位置关系。
七年级数学平面直角坐标系动点问题在数学中,平面直角坐标系是一个重要的概念。
它由两条垂直的坐标轴组成,分别是x轴和y轴。
在这个坐标系中,我们可以用两个数(x,y)来表示一个点的位置,其中x表示点在x轴上的位置,y 表示点在y轴上的位置。
通过这个坐标系,我们可以解决很多与点相关的问题。
本文将讨论七年级数学中与平面直角坐标系动点问题相关的内容。
我们将从点的表示、点的运动和点的坐标变化等方面进行探讨。
一、点的表示在平面直角坐标系中,我们可以用两个数(x,y)来表示一个点。
其中x表示点在x轴上的位置,y表示点在y轴上的位置。
例如,点A的坐标为(2,3),表示它在x轴上的位置是2,在y轴上的位置是3。
同样,点B的坐标为(-1,5),表示它在x轴上的位置是-1,在y轴上的位置是5。
二、点的运动在平面直角坐标系中,点可以进行各种运动。
例如,我们可以使点上下左右移动,也可以使点绕某个点旋转。
这些运动可以通过改变点的坐标来实现。
1. 点的上下左右移动当我们希望点在x轴上移动时,只需改变它的x坐标;当我们希望点在y轴上移动时,只需改变它的y坐标。
例如,如果我们希望将点A在x轴上向右移动2个单位,则可以将点A的坐标改为(4,3)。
同样,如果我们希望将点A在y轴上向上移动3个单位,则可以将点A的坐标改为(2,6)。
2. 点的旋转点的旋转是指将点绕某个点按照一定的角度进行转动。
在平面直角坐标系中,我们可以通过改变点的坐标来实现旋转。
例如,如果我们希望将点A绕原点逆时针旋转90度,则可以将点A的坐标改为(-3,2)。
三、点的坐标变化在平面直角坐标系中,点的坐标可以随着运动的变化而变化。
我们可以通过观察点的坐标变化来研究点的运动规律。
1. 点的轨迹点的轨迹是指点在平面直角坐标系中所经过的路径。
通过观察点的坐标变化,我们可以确定点的轨迹。
2. 点的速度点的速度是指点在单位时间内移动的距离。
在平面直角坐标系中,我们可以通过观察点的坐标变化来计算点的速度。
完整版)初一平面直角坐标系动点问题(经典难题)一)找规律1.如图1,一只跳蚤在第一象限及x轴、y轴上跳动。
在第一秒钟,它从原点跳动到(0,1),然后按照箭头所示方向跳动(即(0,0)→(0,1)→(1,1)→(1,0)→…),每秒跳动一个单位。
那么第35秒时跳蚤所在位置的坐标是(4,1),因此答案为A。
2.如图2,所有正方形的中心都在坐标原点,且各边与x轴或y轴平行。
从内到外,它们的边长依次为2,4,6,8,…,顶点依次用A1,A2,A3,A4,…表示。
顶点A55的坐标是(54,54),因此答案为A。
3.如图3,在平面直角坐标系中,有若干个横、纵坐标分别为整数的点,其顺序按图中点的坐标分别为(1,0),(2,0),(2,1),(1,1),(1,2),(2,2),…的规律排列。
根据这个规律,第2015个点的横坐标为1,因此答案为A。
4.在平面直角坐标系中,一只蚂蚁从原点O出发,按照向上、向右、向下、向右的方向依次不断移动,每次移动1个单位,其行走路线如图3所示。
1)填写下列各点的坐标:A1(0,1),A3(2,1),A12(6,﹣2);2)点A4n的坐标为(2n,﹣2n+1);3)蚂蚁从点A100到A101的移动方向为向上。
5.观察下列有序数对:(3,﹣1),(﹣5,0),(7,﹣1),(﹣9,0),…根据你发现的规律,第100个有序数对是(195,﹣1)。
6.观察下列有规律的点的坐标:A1(1,0),A2(2,1),A3(4,0),A4(8,1),…依照规律,A11的坐标为(1024,1),A12的坐标为(2048,0)。
7.以原点为起点,正东,正北方向为x轴,y轴正方向建立平面直角坐标系。
一个机器人从原点O点出发,向正东方向走3米到达A1点,再向正北方向走6米到达A2,再向正西方向走9米到达A3,再向XXX方向走12米到达A4,再向正东方向走15米到达A5,按此规律走下去,当机器人走到A6时,A6的坐标是(﹣3,﹣3)。
八年级上册数学《第5章平面直角坐标系》专题训练平面直角坐标系中点的规律探究一、选择题(共10题)1.(2023秋•茂南区期中)如图,一只小蚂蚁在平面直角坐标系中按图中路线进行“爬楼梯”运动,第1次它从原点运动到点(1,0),第2次运动到点(1,1),第3次运动到点(2,1)……按这样的运动规律,经过第2023次运动后,小蚂蚁的坐标是()A.(1011,1010)B.(1011,1011)C.(1012,1011)D.(1012,1012)【分析】根据吗,每次小蚂蚁运动的位置所对应的坐标,发现规律即可解决问题.【解答】解:由题知,小蚂蚁第1次运动到点(1,0);第2次运动到点(1,1);第3次运动到点(2,1);第4次运动到点(2,2);第5次运动到点(3,2);第6次运动到点(3,3);…由此可见,小蚂蚁运动2n(n为正整数)次,所在位置的坐标为(n,n),且下一次运动所对应的点的坐标为(n+1,n).所以第2022次运动到点(1011,1011),则第2023次运动到点(1012.1011).故选:C.【点评】本题考查点的运动规律,能根据题中小蚂蚁的运动方式发现第2n次运动后所对应点的坐标为(n,n)是解题的关键.2.(2023•南乐县一模)如图,在平面直角坐标系中,点A(1,1),B(3,1),C(3,3),D(1,3),动点P从点A出发,以每秒1个单位长度的速度沿AB﹣BC﹣CD﹣DA﹣AB﹣…路线运动,当运动到87秒时,点P的坐标为()A.(3,2)B.(2,3)C.(2,1)D.(1,2)【分析】根据坐标可知四边形ABCD为正方形,边长为2,周长为8.点P速度为1秒/每单位,运动87秒,求出路程.再求出路程中经过多少个完整的正方形ABCD,剩下的路程在正方形中运动找出终点即可得出点P坐标.【解答】解:∵A(1,1),B(3,1),C(3,3),D(1,3),∴AB=BC=CD=DA=2,正方形ABCD的周长=2×4=8.∵Vp=1s/每单位,∴Sp=1×87=87.87÷8=10…7.∵2+2+2=6,7﹣6=1∴点P在线段AD上且为线段AD中点.∴P(1,2).故选:D.【点评】本题以点的运动为背景考查了点的坐标规律,考核了学生对于运动的归纳总结能力,解题关键是求出正方形的边长,确定点P的位置.属于中考常考题型.3.(2022秋•李沧区期末)如图,在平面直角坐标系中,A1(1,﹣2),A2(2,0),A3(3,2),A4(4,0),…根据这个规律,点A2023的坐标是()A.(2022,0)B.(2023,0)C.(2023,2)D.(2023,﹣2)【分析】由图形得出点的横坐标依次是1、2、3、4、…、n,纵坐标依次是﹣2、0、2、0、﹣2、0、2、…,四个一循环,继而求得答案.【解答】解:观察图形可知,点的横坐标依次是1、2、3、4、…、n,纵坐标依次是﹣2、0、2、0、﹣2、0、2、…,四个一循环,2023÷4=505……3,所以点A2023坐标是(2023,2).故选:C.【点评】本题考查了规律型:点的坐标,学生的观察图形的能力和理解能力,解题的关键是根据图形得出规律.4.(2023春•平潭县期末)如图,在平面直角坐标系xOy中,点P(1,0).点P第1次向上跳动1个单位至点P1(1,1),紧接着第2次向左跳动2个单位至点P2(﹣1,1),第3次向上跳动1个单位至点P3,第4次向右跳动3个单位至点P4,第5次又向上跳动1个单位至点P5,第6次向左跳动4个单位至点P6,….照此规律,点P第100次跳动至点P100的坐标是()A.(﹣26,50)B.(﹣25,50)C.(26,50)D.(25,50)【分析】解决本题的关键是分析出题目的规律,以奇数开头的相邻两个坐标的纵坐标是相同的,所以第100次跳动后,纵坐标为100÷2=50;其中4的倍数的跳动都在y轴的右侧,那么第100次跳动得到的横坐标也在y轴右侧.P1横坐标为1,P4横坐标为2,P8横坐标为3,依此类推可得到P100的横坐标.【解答】解:经过观察可得:P1和P2的纵坐标均为1,P3和P4的纵坐标均为2,P5和P6的纵坐标均为3,因此可以推知P99和P100的纵坐标均为100÷2=50;其中4的倍数的跳动都在y轴的右侧,那么第100次跳动得到的横坐标也在y轴右侧.P1横坐标为1,P4横坐标为2,P8横坐标为3,依此类推可得到:P n的横坐标为n÷4+1(n是4的倍数).故点P100的横坐标为:100÷4+1=26,纵坐标为:100÷2=50,点P第100次跳动至点P100的坐标是(26,50).故选:C.【点评】本题考查规律型:点的坐标,解题的关键是分析出题目的规律,找出题目中点的坐标的规律,属于中考常考题型.5.(2023春•龙凤区期中)如图,在平面直角坐标系中A(﹣1,1),B(﹣1,﹣2),C(3,﹣2),D (3,1),一只瓢虫从点A出发以2个单位长度/秒的速度沿A→B→C→D→A循环爬行,问第2022秒瓢虫在()处.A.(﹣1,1)B.(1,1)C.(2,1)D.(3,1)【分析】根据点A、B、C、D的坐标可得出AB、AD及矩形ABCD的周长,由4044÷14商是288,余数是12,可得出当t=2022秒时瓢虫在点D左侧2个单位处,再结合点D的坐标即可得出结论.【解答】解:∵A(﹣1,1),B(﹣1,﹣2),C(3,﹣2),D(3,1),∴AB=CD=3,AD=BC=4,=2(AB+AD)=14,∴C矩形ABCD瓢虫2022秒行驶的路程为:2022×2=4044,∵4044÷14商是288,余数是12,∴当t=2022秒时,瓢虫在点D左侧2个单位处,∴此时瓢虫的坐标为(1,1),故B正确.故选:B.【点评】本题考查了规律型中点的坐标,根据瓢虫的运动规律找出当t=2022秒时瓢虫在点D处,是解题的关键.6.(2022春•启东市期中)如图,在平面直角坐标系xOy中,点A坐标是(1,1).若记点A坐标为(a1,a2),则一个点从点A出发沿图中路线依次经过B(a3,a4),C(a5,a6),D(a7,a8)…,每个点的横纵坐标都是整数,按此规律一直运动下去,则a2020+a2021+a2022的值为()A.2021B.2022C.1011D.1012【分析】观察已知点的坐标可得,所有数列奇数个都是从1开始逐渐递增的,且都等于所在的个数加上1再除以2,则a2021=1011,偶数列等于所在的个数除以4,能够整除的,结果的相反数就是所求出的数,不能整除的,等于结果的整数部分加1,且符号为正,进而可得结果.【解答】解:由直角坐标系可知A(1,1),B(2,﹣1),C(3,2),D(4,﹣2),……,即a1=1,a2=1,a3=2,a4=﹣1,a5=3,a6=2,a7=4,a8=﹣2,……,所有数列奇数个都是从1开始逐渐递增的,且都等于所在的个数加上1再除以2,则a2021=1011,偶数列等于所在的个数除以4,能够整除的,结果的相反数就是所求出的数,不能整除的,等于结果的整数部分加1,且符号为正,∴a2021=﹣505,2023÷4=505……3,∴a2022=506,故a2020+a2021+a2022=1012,故选:D.【点评】本题主要考查了规律型:点的坐标,探索数字与字母规律是解题关键.7.(2022•浉河区校级开学)如图,在平面直角坐标系中,A1(2,0),B1(0,1),A1B1的中点为C1;A2(0,3),B2(﹣2,0),A2B2的中点为C2;A3(﹣4,0),B3(0,﹣3),A3B3的中点为C3;A4(0,﹣5),B4(4,0),A4B4的中点为C4;…;按此做法进行下去,则点C2022的坐标为()A.(﹣1012,−20232)B.(﹣1011,20232)C.(﹣1011,−20232)D.(﹣1012,−20212)【分析】根据题意得点∁n的位置按4次一周期的规律循环出现,可求得点C2022在第二象限,从而可求得该题结果.【解答】解:由题意可得,点∁n的位置按4次一周期的规律循环出现,∵2022÷4=505……2,∴点C2022在第二象限,∵位于第二象限内的点C2的坐标为(﹣1,32),点C6的坐标为(﹣3,72),点C10的坐标为(﹣5,112),……∴点∁n的坐标为(−2,r12),∴当n=2022时,−2=−20222=−1011,r12=2022+12=20232,∴点C2022的坐标为(﹣1011,20232),故选:B.【点评】此题考查了点的坐标方面规律性问题的解决能力,关键是能根据题意确定出该点的出现规律.8.(2022春•冷水滩区校级期中)如图,已知A1(1,2)A2(2,2)A3(3,0)A4(4,﹣2)A5(5,﹣2)A6(6,0)……,按这样的规律,则点A2021的坐标为()A.(2021,2)B.(2020,2)C.(2021,﹣2)D.2020,﹣2)【分析】观察发现,每6个点形成一个循环,再根据点A6的坐标及2021÷6所得的整数及余数,可计算出点A2021的横坐标,再根据余数对比第一组的相应位置的数可得其纵坐标.【解答】解:观察发现,每6个点形成一个循环,∵A6(6,0),∴OA6=6,∵2021÷6=336…5,∴点A2021的位于第337个循环组的第5个,∴点A2021的横坐标为6×336+5=2021,其纵坐标为:﹣2,∴点A2021的坐标为(2021,﹣2).故选:C.【点评】本题考查了平面直角坐标系中的点的规律问题,发现题中的规律并正确计算出点A2021所处的循环组是解题的关键.9.(2023•莱阳市二模)自然界中存在许多斐波那契螺旋线图案.斐波那契螺旋线,也称“黄金螺旋线”,是根据斐波那契数1,1,2,3,5,8,13,……画出螺旋曲线.在平面直角坐标系中,依次以这组数为半径作90°的圆弧12 ,23 ,34 ⋯,得到一组螺旋线,连接P1P2,P2P3,P3P4,⋯,得到一组螺旋折线,如图所示.已知点P1,P2,P3的坐标分别为(﹣1,0),(0,1),(1,0),则点P7的坐标为()A.(6,1)B.(8,0)C.(8,2)D.(9,﹣2)【分析】观察图象,找出每个点的运动轨迹与斐波那契数结合推出P7的位置,即可解决问题.【解答】解:观察发现:P1(﹣1,0)先向右平移1个单位,再向上平移1个单位得到P2(0,1);P2(0,1)先向右平移1个单位,再向下平移1个单位得到P3(1,0);P3(1,0)先向左平移2个单位,再向下平移2个单位得到P4(﹣1,﹣2);P4(﹣1,﹣2)先向左平移3个单位,再向上平移3个单位得到P5(﹣4,1);P5(﹣4,1)先向右平移5个单位,再向上平移5个单位得到P6(1,6).根据斐波那契数,P6(1,6)应先向右平移8个单位,再向下平移8个单位得到P7(9,﹣2).故选:D.【点评】本题考查在平面直角坐标系中的点的坐标规律.考查了学生数形结合的能力,解题的关键是找出每个点的坐标及运动规律,推出答案即可.在做题时一定要理解题意.10.如图,在平面直角坐标系中,有若干个整数点,其顺序按图中“→”方向排列,如(1,0),(2,0),(2,1),(3,1),(3,0),(3,﹣1)…根据这个规律探索可得,第100个点的坐标()A.(14,0)B.(14,﹣1)C.(14,1)D.(14,2)【分析】观察图形可知,横坐标相等的点的个数与横坐标相同,根据求和公式求出第100个点的横坐标以及在这一横坐标中的所有点中的序数,再根据横坐标是奇数时从上向下排列,横坐标是偶数时从下向上排列,然后解答即可.【解答】解:由图可知,横坐标是1的点共有1个,横坐标是2的点共有2个,横坐标是3的点共有3个,横坐标是4的点共有4个,…,横坐标是n的点共有n个,1+2+3+…+n=or1)2,当n=13时,13×(13+1)2=91,当n=14时,14×(14+1)2=105,所以,第100个点的横坐标是14,∵100﹣91=9,∴第100个点是横坐标为14的点中的第9个点,∵第142=7个点的纵坐标是0,∴第9个点的纵坐标是2,∴第100个点的坐标是(14,2).故选:D.【点评】本题是对点的变化规律的考查,观察得到横坐标相等的点的个数与横坐标相同是解题的关键,还要注意横坐标为奇数和偶数时的排列顺序不同.二、填空题(共10题)11.(2022春•东洲区期末)如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(﹣1,1),第2次接着运动到点(﹣2,0),第3次接着运动到点(﹣3,2),…,按这样的运动规律,经过第2022次运动后,动点P的坐标是.A.(2022,0)B.(﹣2022,0)C.(﹣2022,1)D.(﹣2022,2)【分析】观察图形可知:每4次运动为一个循环,并且每一个循环向左运动4个单位,用2022÷4可判断出第2022次运动时,点P在第几个循环第几次运动中,进一步即可计算出坐标.【解答】解:动点P的运动规律可以看作每运动四次为一个循环,每个循环向左运动4个单位,∵2022÷4=505……2,∴第2022次运动时,点P在第506次循环的第2次运动上,∴横坐标为﹣(505×4+2)=﹣2022,纵坐标为0,∴此时P(﹣2022,0).故答案为:(﹣2022,0).【点评】本题考查规律型:点坐标,解答时注意探究点的运动规律,又要注意动点的坐标的象限符号.12.(2022秋•肃州区校级期末)如图,已知A1(1,0),A2(1,﹣1),A3(﹣1,﹣1),A4(﹣1,1),A5(2,1),…则点A2022的坐标是.【分析】根据题意可以发现规律:A4n(﹣n,n),A4n+1(n+1,n),A4n+2(n+1,﹣n﹣1),A4n+3(﹣n﹣1,﹣n﹣1),根据规律求解即可.【解答】解:根据题意可以发现规律:A1(1,0),A2(1,﹣1),A3(﹣1,﹣1),A4(﹣1,1),A5(2,1),A6(2,﹣2),A7(﹣2,﹣2),A8(﹣2,2),…,∴A4n(﹣n,n),A4n+1(n+1,n),A4n+2(n+1,﹣n﹣1),A4n+3(﹣n﹣1,﹣n﹣1),∵2022=4×505+2,∴点A2022的坐标为(506,﹣506),故答案为:(506,﹣506).【点评】本题主要考查规律性:点的坐标,读懂题意,找出点的坐标规律是解答此题的关键.13.(2021秋•同安区期末)如图,点A(0,1),点A1(2,0),点A2(3,2),点A3(5,1)…,按照这样的规律下去,点A2021的坐标为.【分析】观察图形得到奇数点的规律为,A1(2,0),A3(5,1),A5(8,2),…,A2n﹣1(3n﹣1,n(3032,1010).﹣1),由2021是奇数,且2021=2n﹣1,则可求A2n﹣1【解答】解:观察图形可得,A1(2,0),A3(5,1),A5(8,2),…,A2n﹣1(3n﹣1,n﹣1),A2(3,2),A4(6,3),A6(9,4),…,A2n(3n,n+1),∵2021是奇数,且2021=2n﹣1,∴n=1011,(3032,1010),∴A2n﹣1故答案为(3032,1010).【点评】本题考查点的坐标规律;熟练掌握平面内点的坐标,能够根据图形的变化得到点的坐标规律是解题的关键.14.(2023秋•德州期中)如图,弹性小球从点P(0,1)出发,沿所示方向运动,每当小球碰到正方形OABC的边时反弹,反弹的反射角等于入射角(反射前后的线与边的夹角相等),当小球第1次碰到正方形的边时的点为P1(2,0),第2次碰到正方形的边时的点为P2…,第n次碰到正方形的边时的点为P n,则点P2023的坐标为.【分析】按照反弹规律依次画图即可.【解答】解:如图:根据反射角等于入射角画图,可知小球从P2反射后到P3(0,3),再反射到P4(2,4),再反射到P5(4,3),再反射到P点(0,1)之后,再循环反射,每6次一循环,∵2023÷6=337……1,∴点P2023的坐标是(2,0).故答案为:(2,0).【点评】本题考查了生活中的轴对称现象,点的坐标.解题的关键是能够正确找到循环数值,从而得到规律.15.(2023春•金乡县期中)如图,小球起始时位于(3,0)处,沿所示的方向击球,小球运动的轨迹如图所示.如果小球起始时位于(1,0)处,仍按原来方向击球,小球第一次碰到球桌边时,小球的位置是(0,1),那么小球第2024次碰到球桌边时,小球的位置是.【分析】根据题意,可以画出相应的图形,然后即可发现点所在位置的变化特点,即可得到小球第2024次碰到球桌边时小球的位置.【解答】解:由图可得,点(1,0)第一次碰撞后的位置的坐标为(0,1),第二次碰撞后的位置的坐标为(3,4),第三次碰撞后的位置的坐标为(7,0),第四次碰撞后的位置的坐标为(8,1),第五次碰撞后的位置的坐标为(5,4),第六次碰撞后的位置的坐标为(1,0),…,∴小球位置每6次为一个周期依次循环,∵2024÷6=337…2,∴小球第2024次碰到球桌边时,小球的位置是(3,4),故答案为:(3,4).【点评】本题考查点坐标规律探索,解答本题的关键是明确题意,发现点的坐标位置的变化特点,利用数形结合的思想解答.16.(2022•绥化三模)如图,在平面直角坐标系中,每个最小方格的边长均为1个单位长度,点P1,P2,P3,…均在格点上,其顺序按图中“→”方向排列,如:P1(0,0),P2(0,1),P3(1,1),P4(1,﹣1),P5(﹣1,﹣1),P6(﹣1,2),…,根据这个规律,点P2022的坐标为.【分析】根据各个点的位置关系,可得出下标为4的倍数的点在第四象限,被4除余1的点在第三象限的角平分线上,被4除余2的点在第二象限,被4除余3的点在第一象限的角平分线上,点P2022的在第三象限,且横纵坐标的绝对值=2022÷4的商,纵坐标是2022÷4的商+1,再根据第三项象限内点的符号得出答案即可.【解答】解:∵2022÷4=505…2,∴点P2022在第二象限,∵P6(﹣1,2),P10(﹣2,3),P14(﹣3,4),…,6÷4=1…2,10÷4=2…2,14÷2=3..2,…,∴P2022(﹣505,506).故答案为:(﹣505,506).【点评】本题考查了规律型:点的坐标,是一个阅读理解,猜想规律的题目,解答此题的关键是首先确定点所在的大致位置,所在正方形,然后就可以进一步推得点的坐标.17.(2022秋•杏花岭区校级期中)在平面直角坐标系xOy中,对于点P(x,y),我们把点P1(﹣y+1,x+1)叫做点P的伴随点.已知点A1的伴随点为A2,点A2的伴随点为A3,点A3的伴随点为A4,…,这样依次得到点A1,A2,A3,⋯,A n,若点A1的坐标为(3,1),则点A2022的坐标为.【分析】根据“伴随点”的定义依次求出各点,不难发现,每4个点为一个循环组依次循环,用2022除以4,根据商和余数的情况确定点A2022的坐标即可.【解答】解:∵A1的坐标为(3,1),∴A2(0,4),A3(﹣3,1),A4(0,﹣2),A5(3,1),…,依此类推,每4个点为一个循环组依次循环,∵2022÷4=505余2,∴点A2022的坐标与A2的坐标相同,为(0,4);故答案为:(0,4).【点评】此题考查点的坐标规律,读懂题目信息,理解“伴随点”的定义并求出每4个点为一个循环组依次循环是解题的关键.18.(2023秋•沈河区校级期中)如图,在平面直角坐标系中,将△ABO沿x轴向右滚动到△AB1C1的位置,再到△A1B1C2的位置…依次进行下去,若已知点A(3,0),B(0,4),则点A2023的坐标为.【分析】根据点A(3,0),B(0,4)得AB=5,再根据旋转的过程寻找规律即可求解.【解答】解:∵∠AOB=90°,点A(3,0),B(0,4),根据勾股定理,得AB=5,根据旋转可知:∴OA+AB1+B1C2=3+5+4=12,所以点B2(12,4),A1(12,3);继续旋转得,B4(2×12,4),A3(24,3);B6(3×12,4),A5(36,3)…,发现规律:A2023(12×2023+12,3).所以点A2023的坐标为(12144,3).故答案为:(12144,3).【点评】本题考查了规律型:点的坐标,解决本题的关键是灵活运用旋转的知识.19.(2022春•五华区校级期中)如图,在直角坐标系中,长方形OABC的长为2,宽为1,将长方形OABC 沿x轴翻转1次,点A落在A1处,翻转2次,点A落在A2处,翻转3次,点A落在A3处(点A3与点A2重合),翻转4次,点A落在A4处,以此类推…,若翻转2022次,点A落在A2022处,则A2022的坐标为.【分析】探究规律,利用规律解决问题即可.【解答】解:由题意A1(3,2),A2(A3)(5,0),A4(6,1),•••,发现4次一个循环,∵2022÷4=505.....2,∴A2022的纵坐标与A2相同,横坐标=505×6+5=3035,∴A2022(3035,0),故答案为:(3035,0).【点评】本题考查坐标与图形的变化﹣对称,规律型问题,解题的关键是学会探究规律的方法,属于中考填空题中的压轴题.20.(2023•潍坊开学)如图,在平面直角坐标系中,A、B、C,D四点的坐标分别是A(1,3),B(1,1),C(3,1),D(3,3)、动点P从点A出发,在正方形边上按照A→B→C→D→A→…的方向不断移动,已知P的移动速度为每秒1个单位长度,则第2023秒点P的坐标是.【分析】根据点P的移动方式,可得出第2023秒点P的位置,进而解决问题.【解答】解:因为点P从点A出发,在正方形边上按照A→B→C→D→A→…的方向不断移动,且P的移动速度为每秒1个单位长度,所以第1秒点P的坐标是(1,2);第2秒点P的坐标是(1,1);第3秒点P的坐标是(2,1);第4秒点P的坐标是(3,1);第5秒点P的坐标是(3,2);第6秒点P的坐标是(3,3);第7秒点P的坐标是(2,3);第8秒点P的坐标是(1,3);第9秒点P的坐标是(1,2);…由此可见,点P的坐标每8秒循环一次,又2023÷8=252余7,所以第2023秒点P的坐标是(2,3).故答案为:(2,3).【点评】本题考查点的运动规律,能根据点P的移动方式每8秒一循环是解题的关键.三、解答题(共12题)21.(2022秋•无为市月考)在平面直角坐标系中,一个动点A从原点O出发,按向上、向右、向下、向右的方向依次不断移动,每次只移动1个单位长度,其行走路线如图所示.(1)填写下列各点的坐标:A4,A6,A12,A14.(2)按此规律移动,n为正整数,则点A4n的坐标为,点A4n+2的坐标为.(3)动点A从点A2022到点A2023的移动方向是.(填“向上”、“向右”或“向下”)【分析】(1)根据点的坐标变化即可填写各点的坐标;(2)根据(1)发现规律即可写出点A4n的坐标(n为正整数);(3)根据(2)发现的规律,每四个点一个循环,进而可得蜗牛从点A2020到点A2021的移动方向.【解答】解:(1)根据点的坐标变化可知:各点的坐标为:A4(2,0),A6(3,1),A12(6,0),A14(7,1);故答案为:(2,0),(3,1),(6,0),(7,1);(2)根据(1)发现:点A4n的坐标(n为正整数)为(2n,0);点A4n+2的坐标为(2n+1,1);故答案为:(2n,0),(2n+1,1);(3)因为每四个点一个循环,所以2023÷4=505…3.所以从点A2022到点A2023的移动方向是向下.故答案为:向下.【点评】本题考查了规律型﹣点的坐标,解决本题的关键是根据点的坐标变化发现规律,总结规律,运用规律.22.如图,在平面直角坐标系中,一动点从原点O出发,沿着箭头所示方向,每次移动1个单位,依次得到点P1(0,1),P2(1,1),P3(1,0),P4(1,﹣1),P5(2,﹣1),P6(2,0)…(1)填写下列各点的坐标:P9(、),P12(、),P15(、)(2)写出点P3n的坐标(n是正整数);(3)点P60的坐标是(、);(4)指出动点从点P210到点P211的移动方向.【分析】由题意可以知道,动点运动的速度是每次运动一个单位长度,(0,1)→(1,1)→(1,0)→(1,﹣1)……通过观察找到有规律的特殊点,如P3、P6、P9、P12,发现其中规律是脚标是3的倍数的点,依次排列在x轴上,且相距1个单位,明确这个规律即可解决以上所有问题.【解答】解:(1)由动点运动方向与长度可得P3(1,0),P6(2,0),可以发现脚标是3的倍数的点,依次排列在x轴上,且相距1个单位,即动点运动三次与横轴相交,故答案为P9(3,0),P12(4、0),P15(5、0).(2)由(1)可归纳总结点P3n的坐标为P3n(n,0),(n是正整数);(3)根据(2),∵60=3×20,∴点P60的横坐标是20故点P60的坐标是(20、0)故答案为(20、0).(4)∵210=3×70,符合(2)中的规律∴点P210在x轴上,又由图象规律可以发现当动点在x轴上时,偶数点向上运动,奇数点向下运动,而点P210是在x轴上的偶数点所以动点从点P210到点P211的移动方向应该是向上.【点评】本题是一个阅读理解,猜想规律的题目,解答此题的关键是首先确定动点移动的数字与方向上的规律,然后再进一步按规律解决要求的点的位置.23.(2023春•凤台县期末)在直角坐标系中,设一质点M自P0(1,0)处向上运动1个单位至P1(1,1),然后向左运动2个单位至P2处,再向下运动3个单位至P3处,再向右运动4个单位至P4处,再向上运动5个单位至P5处,…如此继续运动下去,设P n(x n,y n),n=1,2,3,….(1)依次写出x1、x2、x3、x4、x5、x6的值;(2)计算x1+x2+…+x8的值;(3)计算x1+x2+…+x2003+x2004的值.【分析】(1)根据图象结合平面坐标系得出各点横坐标即可;(2)根据各点横坐标数据得出规律,进而得出答案即可;(3)经过观察分析可得每4个数的和为2,把2004个数分为501组,即可得到相应结果.【解答】解:(1)根据平面坐标系结合各点横坐标得出:x1、x2、x3、x4、x5、x6的值分别为:1,﹣1,﹣1,3,3,﹣3;(2)∵x1+x2+x3+x4=1﹣1﹣1+3=2;x5+x6+x7+x8=3﹣3﹣3+5=2;∴x1+x2+…+x8=2+2=4;(3)∵x1+x2+x3+x4=1﹣1﹣1+3=2;x5+x6+x7+x8=3﹣3﹣3+5=2;…x97+x98+x99+x100=2…∴x1+x2+…+x2003+x2004=2×(2004÷4)=1002.【点评】此题主要考查了点的坐标特点,解决本题的关键是分析得到4个数相加的规律.23.(2022秋•长丰县期末)如图,所有正方形的中心均在坐标原点,且各边与x轴或y轴平行,从内到外,它们的边长依次为2、4、6、8、…,顶点依次用A1、A2、A3、A4、…表示.(1)请直接写出A5、A6、A7、A8的坐标;(2)根据规律,求出A2022的坐标.【分析】(1)看图观察即可直接写出答案;(2)根据正方形的性质找出部分A n点的坐标,根据坐标的变化找出变化规律“A4n+1(﹣n﹣1,﹣n﹣1),A4n+2(﹣n﹣1,n+1),A4n+3(n+1,n+1),A4n+4(n+1,﹣n﹣1)(n为自然数)”,依此即可得出结论.【解答】解:(1)A5(﹣2,﹣2),A6(﹣2,2),A7(2,2),A8(2,﹣2);(2)观察发现:A1(﹣1,﹣1),A2(﹣1,1),A3(1,1),A4(1,﹣1),A5(﹣2,﹣2),A6(﹣2,2),A7(2,2),A8(2,﹣2),A9(﹣3,﹣3),…,∴A4n+1(﹣n﹣1,﹣n﹣1),A4n+2(﹣n﹣1,n+1),A4n+3(n+1,n+1),A4n+4(n+1,﹣n﹣1)(n 为自然数),∵2022=505×4+2,∴A2022(﹣506,506).【点评】本题考查了规律型:点的坐标,解题的关键是找出变化规律“A4n+1(﹣n﹣1,﹣n﹣1),A4n+2(﹣n﹣1,n+1),A4n+3(n+1,n+1),A4n+4(n+1,﹣n﹣1)(n为自然数)”.本题属于基础题,难度不大,解决该题型题目时,根据点的坐标的变化找出变化规律是关键.24.一个质点在第一象限及x轴、y轴移动,在第一秒时,它从原点移动到(0,1),然后按着下列左图中箭头所示方向移动,即(0,0)→(0,1)→(1,1)→(1,0)→…,且每秒移动1个单位.(1)该质点移动到(1,1)的时间为秒,移动到(2,2)的时间为秒,移动到(3,3)的时间为秒,…,移动到(n,n)的时间为秒.(2)该质点移动到(7,4)的时间为秒.【分析】(1)根据图形可得出质点移动到(1,1),(2,2),(3,3)的时间,根据规律可得出质点移动(n,n)的时间;(2)现有(1)的结论得出(7,7)的时间,再加上3即可得出移动到(7,4)的时间.【解答】解:(1)由图可知移动到(1,1)的时间为2秒,移动到(2,2)的时间为6秒,移动到(3,3)的时间为12秒,根据变化规律可得移动到(n,n)的时间为n(n+1),故答案为:2,6,12,n(n+1);(2)由(1)可得移动到(7,7)的时间为7×8=56,56+3=59,∴移动到(7,4)的时间为59秒,故答案为59.【点评】本题主要考查点的坐标的变化规律,关键是要能找到质点移动到(n,n)的时间的规律.25.(2022•马鞍山一模)如图,某小区绿化区的护栏是由两种大小不等的正方形间隔排列组成,将护栏的图案放在平面直角坐标系中.已知小正方形的边长为1,A1的坐标为(2,2),A2的坐标为(5,2).(1)A3的坐标为,A n的坐标为用含n的代数式表示;(2)若护栏长为2020,则需要小正方形个,大正方形个.【分析】(1)根据已知条件与图形可知,大正方形的对角线长为2,由此可得规律:A1,A2,A3,…,A n各点的纵坐标均为2,横坐标依次大3,由此便可得结果;(2)先求出一个小正方形与一个大正方形所构成的护栏长度,再计算2020米包含多少这样的长度,进而便可求出结果.【解答】解:(1)∵A 1的坐标为(2,2)、A 2的坐标为(5,2),∴A 1,A 2,A 3,…,A n 各点的纵坐标均为2,∵小正方形的边长为1,∴A 1,A 2,A 3,…,A n 各点的横坐标依次大3,∴A 3(5+3,2),A n (2+3+3+⋅⋅⋅+3︸(K1)个3,2),即A 3(8,2),A n (3n ﹣1,2),故答案为(8,2);(3n ﹣1,2);(2)∵2020÷3=673…1,∴需要小正方形674个,大正方形673个.【点评】本题是点的坐标的规律题,首先应找出图形哪些部分发生了变化,是按照什么规律变化的,通过分析找到各部分的变化规律后直接利用规律求解.探寻规律要认真观察、仔细思考,善用联想来解决这类问题.26.如图,在直角坐标系中,第一次将△OAB 变换成△OA 1B 1,第二次将△OA 1B 1变成△OA 2B 2,第三次将△OA 2B 2变成△OA 3B 3,已知A (1,5),A 1(2,5),A 2(4,5),A 3(8,5);B (2,0),B 1(4,0),B 2(8,0),B 3(16,0).(1)观察每次变换前后三角形有何变化,找出规律.按此规律将△OA 3B 3变成△OA 4B 4,则A 4的坐标是,B 4的坐标是.(2)若按第(1)题中找到的规律将△OAB 进行n 次变换,得到△OA n B n ,比较每次变换中三角形顶点的坐标有何变化,找出规律,推测A n 的坐标是,B n 的坐标是.【分析】(1)对于A 1,A 2,A n 坐标找规律可将其写成竖列,比较从而发现A n 的横坐标为2n ,而纵坐标都是5,同理B 1,B 2,B n 也一样找规律.(2)根据第一问得出的A 4的坐标和B 4的坐标,再此基础上总结规律即可知A n 的坐标是(2n ,5),B n的坐标是(2n+1,0).【解答】解:(1)因为A(1,5),A1(2,5),A2(4,5),A3(8,5)…纵坐标不变为5,同时横坐标都和2有关,为2n,那么A4(16,5);因为B(2,0),B1(4,0),B2(8,0),B3(16,0)…纵坐标不变,为0,同时横坐标都和2有关为2n+1,那么B的坐标为B4(32,0);故答案为:(16,5),(32,0);(2)由上题第一问规律可知A n的纵坐标总为5,横坐标为2n,B n的纵坐标总为0,横坐标为2n+1,∴A n的坐标是(2n,5),B n的坐标是(2n+1,0).故答案为:(2n,5),(2n+1,0).【点评】本题考查了学生观察图形及总结规律的能力,涉及的知识点为:平行于x轴的直线上所有点纵坐标相等,x轴上所有点的纵坐标为0.27.小明在学习了平面直角坐标系后,突发奇想,画出了这样的图形(如图),他把图形与x轴正半轴的交点依次记作A1(1,0),A2(5,0),…A n,图形与y轴正半轴的交点依次记作B1(0,2),B2(0,6),…B n,图形与x轴负半轴的交点依次记作C1(﹣3,0),C2(﹣7,0),…∁n,图形与y轴负半轴的交点依次记作D1(0,﹣4),D2(0,﹣8),…D n,发现其中包含了一定的数学规律.请根据你发现的规律完成下列题目:(1)请分别写出下列点的坐标:A3,B3,C3,D3;(2)请分别写出下列点的坐标:A n,B n,∁n,D n;(3)请求出四边形A5B5C5D5的面积.【分析】(1)根据点的坐标规律解答即可;(2)根据点的坐标规律解答即可;(3)根据四边形A5B5C5D5的面积=△5B5+△5B5+△5B5+△5B5计算即可.【解答】解:(1)A3(9,0),B3(0,10),C3(﹣11,0),D3(0,﹣12).(2)A n(4n﹣3,0),B n(0,4n﹣2),∁n(﹣4n+1,0),D n(0,﹣4n).(3)∵A5(17,0),B5(0,18),C5(﹣19,0),D5(0,﹣20).∴四边形A5B5C5D5的面积=△5B5+△5B5+△5B5+△5B5=12×17×18+12×18×19+12×19×20+12×20×17=684.故答案为:A3(9,0),B3(0,10),C3(﹣11,0),D3(0,﹣12).A n(4n﹣3,0),B n(0,4n﹣2),∁n(﹣4n+1,0),D n(0,﹣4n).【点评】此题考查点的坐标,关键是根据图形得出点的坐标的规律进行分析.28.(2022春•自贡期末)综合与实践问题背景:(1)已知A(1,2),B(3,2),C(1,﹣1),D(﹣3,﹣3).在平面直角坐标系中描出这几个点,并分别找到线段AB和CD中点P1、P2,然后写出它们的坐标,则P1,P2.探究发现:(2)结合上述计算结果,你能发现若线段的两个端点的坐标分别为(x1,y1),(x2,y2),则线段的中点坐标为.拓展应用:(3)利用上述规律解决下列问题:已知三点E(﹣1,2),F(3,1),G(1,4),第四个点H(x,y)与点E、点F、点G中的一个点构成的线段的中点与另外两个端点构成的线段的中点重合,求点H的坐标.【分析】(1)根据坐标的确定方法直接描点,:分别读出各点的纵横坐标,即可得到各中点的坐标;(2)根据(1)中的坐标与中点坐标找到规律;(3)利用(2)中的规律进行分类讨论即可答题.。
坐标系在大学物理运动学中作用的探究摘要求解大学物理运动学方面问题时,选用合适的坐标系能够简化运算。
直角坐标系、极坐标系和自然坐标系都有自己的适用范围。
本文将这3个坐标系的适用范围进行探讨。
找出规律并在课堂教学传授给学生,提高学生的解题能力。
关键词坐标系;大学物理;运动学微积分有着广泛而重要的应用。
用微积分求解物理有关问题,是大学物理教学的重点和难点,不易理解和掌握1。
但对刚刚开始学习运动学部分的大一新生而言,最困难的不是微积分本身,而是如何选用坐标系来简化微积分运算的问题。
一般而言,一个运动学问题可以用多个坐标系来求解,但选择不同坐标系求解同一运动学问题时,所得到的轨迹方程存在着巨大的差别。
轨迹方程越简单,对其进行求导(求速度和加速度)运算就越简单,列出简单轨迹方程的坐标系就比较适合用来求解这类运动学问题。
可以这么说,在运动学中不同的坐标系适合用来解决不同类型的运动学问题,具体而言就是:直角坐标系比较适合用来求解直线运动问题和轨迹方程为一次函数的曲线运动问题;极坐标系比较适合用来求解轨迹方程无法确定的曲线运动问题;自然坐标系比较适合用来求解轨迹方程为二次函数的曲线运动问题。
下面对提出上述论点的理由和依据进行详细论述。
1 求解直线运动问题时,直角坐标系比较占优势当物体运动的轨迹为直线时,直角坐标系列出的方程一般比较简单,如y=ax+b;极坐标系和自然坐标系列出的方程是由直角坐标方程转换而来,转换而来的方程又比原来的直角坐标方程复杂一些。
现将直角坐标系、极坐标系和自然坐标系对直线轨迹的描述列表如下:如表1所示,当运动轨迹为直线时,直角坐标方程非常简单,极坐标方程和自然坐标方程比较相似,比直角坐标方程要复杂得多。
一般来说,方程越简单,对其求一阶导数(求速度)和二阶导数(求加速度)的过程就越简单,对比较简单的直角坐标方程进行求导,无疑要比对极坐标方程和自然坐标方程的求导简单的多。
也就是说,运动轨迹为直线的运动学问题,使用直角坐标系求解比较占据优势。
专题01 平面直角坐标系规律探究问题【知识点梳理】1、关于x 轴、y 轴或原点对称的点的坐标的特征点P (a ,b )与关于x 轴对称点的坐标为 (a ,-b ) 点P (a ,b )与关于y 轴对称点的坐标为 (-a ,b ) 点P (a ,b )与关于原点对称点的坐标为 (-a ,-b ) 口诀:关于谁对称,谁不变,另一个变号,关于原点对称都变号 2、点的平移点P (a ,b )沿x 轴向右(或向左)平移m 个单位后对应点的坐标是(a ±m,b ); 点P (a ,b )沿y 轴向上(或向下)平移n 个单位后对应点的坐标是(a,b ±n ). 口诀:横坐标右加左减,纵坐标上加下减.3、两点间的距离:在x 轴或平行于x 轴的直线上的两点P 1 (x 1,y ),P 2 (x 2,y )间的距离为|x 1−x 2| 在y 轴或平行于y 轴的直线上的两点P 1 (x ,y 1),P 2 (x ,y 2)间的距离为|y 1−y 2| 任意两点P 1 (x 1,y 1),P 2 (x 2,y 2),则线段P 1P 2的中点坐标为(x 1+x 22,y 1+y 22)任意两点P 1 (x 1,y 1),P 2 (x 2,y 2),则线段P 1P 2=√(x 1−x 2)2+(y 1−y 2)2【典例分析】【例1y)经过某种变换后得到点P ′(−y +1,x +2),我们把点P ′(−y +1,x +2)叫做点P(x,y)的终结点.已知点P 1的终结点为P 2,点P 2的终结点为P 3,点P 3的终结点为P 4,这样依次得到P 1、P 2、P 3、P 4、…、nP 、…,若点p 1的坐标为(2,0),则点P 2022的坐标为_____。
【答案】(1,4).解析:解:P 1 坐标为(2,0),则P 2坐标为(1,4),P 3坐标为(-3,3),P 4坐标为(-2,-1),P 5坐标为(2,0),∴P n 的坐标为(2,0),(1,4),(-3,3),(-2,-1)循环, ∵2022=4×505+2, ∴P 2022 坐标与P 2点重合, 故答案为(1,4).【练1】在平面直角坐标系xOy 中,对于点P (x ,y ),我们把点P′(y -1,-x+1)叫做点P 的伴随点.已知点A 1的伴随点为A 2,点A 2的伴随点为A 3,点A 3的伴随点为A 4,…,这样依次得到点A 1,A 2,A 3,…,A n ,….若点A 1的坐标为(3,2),则A 2023的坐标为________【答案】(-3,0)解析:解:∵A1(3,2),A2(1,-2),A3(-3,0),A4(-1,4),A5(3,2),…,∴点A n的坐标4个一循环.∵2023=505×4+3,∴点A2023的坐标与点A2的坐标相同.∴A2023的坐标为(-3,0),故答案为:(-3,0).【练2】某同学在平面直角坐标系内设计了一个动点运动的编程.若一个动点从点A1(1,3)出发,沿A2(3,5)→A3(7,9)→…运动,则点A2022的坐标为()A.(22021﹣1,22021+1)B.(22022﹣1,22022+1)C.(22022﹣2,22022+2)D.(22021﹣2021,22021+2021)【答案】B【解析】解:∵一个动点从点A1(1,3)出发,沿A2(3,5)→A3(7,9)→…运动,∴A n(2n﹣1,2n+1),∴A2022的坐标为:(22022﹣1,22022+1),故选:B.【练3】对点(x,y)的一次操作变换记为P1(x,y),定义其变换法则如下:P1(x,y)=(x+y,x﹣y);且规定P n(x,y)=P1(P n﹣1(x,y))(n为大于1的整数).如P1(1,2)=(3,﹣1),P2(1,2)=P1(P1(1,2))=P1(3,﹣1)=(2,4),P3(1,2)=P1(P2(1,2))=P1(2,4)=(6,﹣2).则P2022(1,﹣1)=.【答案】(21011,21011)【解析】解:由题意可得:P1(1,﹣1)=(0,2),P2(1,﹣1)=(2,﹣2)P3(1,﹣1)=(0,4),P4(1,﹣1)=(4,﹣4)P5(1,﹣1)=(0,8),P6(1,﹣1)=(8,﹣8)…当n为奇数时,P n(1,﹣1)=(0,),当n为偶数时,P n(1,﹣1)=(2n2,2n2),∴P2022(1,﹣1)应该等于(21011,21011).故答案是:(21011,21011).【例2】如图,在平面直角坐标系中,A1(1,2),A2(2,0),A3(3,﹣2),A4(4,0)…根据这个规律,探究可得点A2022的坐标是()A.(2022,0)B.(2022,2)C.(2021,﹣2)D.(2022,﹣2)【答案】A【解析】解:观察图形可知,点A1(1,2),A2(2,0),A3(3,﹣2),A4(4,0)…的横坐标依次是1、2、3、4、…、n,纵坐标依次是2、0、﹣2、0、2、0、﹣2、…,四个一循环,2022÷4=505…2,故点A2022坐标是(2022,0).故选:A.【练1】如图,动点P1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),……,按这样的运动规律,经过第2022次运动后,动点P的坐标是()A.(2021,0)B.(2020,1)C.(2022,0)D.(2022,1)【答案】C【解析】分析图象可以发现,点P的运动每4次位置循环一次.每循环一次向右移动四个单位,∴2022=4×505+2.当第505循环结束时,点P位置在(2020,0),在此基础之上运动两次到(2022,0).故选C.【练2】如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第一次从原点O运动到点P1(1,1),第二次运动到点P2(2,0),第三次运动到P3(3,﹣2),…,按这样的运动规律,第2022次运动后,动点P2022的坐标是()A.(2022,1)B.(2022,2)C.(2022,﹣2)D.(2022,0)【答案】D【解析】解:观察图象,动点P第一次从原点O运动到点P1(1,1),第二次运动到点P2(2,0),第三次运动到P3(3,﹣2),第四次运动到P4(4,0),第五运动到P5(5,2),第六次运动到P6(6,0),…,结合运动后的点的坐标特点,可知由图象可得纵坐标每6次运动组成一个循环:1,0,﹣2,0,2,0;∵2022÷6=337,∴经过第2022次运动后,动点P的纵坐标是0,故选:D.【练3】如图,平面直角坐标系中,一个点从原点O出发,按向右→向上→向右→向下的顺序依次不断移动,每次移动1个单位,其移动路线如图所示,第1次移到点A1,第二次移到点A2,第三次移到点A3,…,第n次移到点A n,则点A2022的坐标是_____________.【答案】(1011,1).【解析】观察图象可知,点A的纵坐标每4个点循环一次,∵2022=505×4+2,∴点A2022的纵坐标与点A2的纵坐标相同,∵A2(1,1),A6(3,1),A10(5,1)……,∴点A2022的坐标是(1011,1).【例3】如图,在平面直角坐标系上有个点A(-1,O),点A第1次向上跳动一个单位至点A1(-1,1),紧接着第2次向右跳动2个单位至点A2(1,1),第3次向上跳动1个单位,第4次向左跳动3个单位,第5次又向上跳动1个单位,第6次向右跳动4个单位,…,依次规律跳动下去,点A第2022次跳动至点A2022的坐标是( )A.(-505, 1011)B.(505, 1010)C.(-506, 1010)D.(506, 1011)【答案】D【解析】解:设第n次跳动至点A n,观察,发现:A(-1,0),A1(-1,1),A2(1,1),A3(1,2),A4(-2,2),A5(-2,3),A6(2,3),A7(2,4),A8(-3,4),A9(-3,5),…,∴A4n(-n-1,2n),A4n+1(-n-1,2n+1),A4n+2(n+1,2n+1),A4n+3(n+1,2n+2)(n为自然数).∵2022=505×4+2,∴A2022(505+1,505×2+1),即(506,1011).故选:D.【练1】如图所示,在平面直角坐标系上有个点P(1,0),点P第1次向上跳动1个单位至点P1(1,1),紧接着第2次向左跳动2个单位至点P2(−1,1),第3次向上跳动1个单位,第4次向右跳动3个单位,第5次又向上跳动1个单位,第6次向左跳动4个单位……依此规律跳动下去,点P第99次跳动至点P99的坐标是_____【答案】(-25,50)【解析】解:由题中规律可得出如下结论:设点Px的横坐标的绝对值是n,则在y轴右侧的点的下标分别是4(n-1)和4n-3,在y轴左侧的点的下标是:4n-2和4n-1;判断P199的坐标,就是看99=4(n-1)和99=4n-3和99=4n-2和99=4n-1这四个式子中哪一个有负整数解,从而判断出点的横坐标.由上可得:点P第99次跳动至点P99的坐标是(-25,50)故答案为:(-25,50).【练2】如图,在平面直角坐标系上有点A0(1,0),点A0第一次跳动至点A1(−1,1),第二次点A1跳动至点A2(2,1),第三次点A跳动至点A3(−2,2),第四次点A3跳动至点A4(3,2),……依2此规律跳动下去,则点A2021与点A2022之间的距离是()A.2023B.2022C.2021D.2020【答案】A【解析】观察发现,第2次跳动至点的坐标是(2,1),第4次跳动至点的坐标是(3,2),第6次跳动至点的坐标是(4,3),第8次跳动至点的坐标是(5,4),…第2n次跳动至点的坐标是(n+1,n),则第2022次跳动至A2022点的坐标是(1012,1011),第2021次跳动至点A2021的坐标是(﹣1011,1011).∵点A2021与点A2022的纵坐标相等,∴点A2021与点A2022之间的距离=1012﹣(﹣1011)=2023.故选:A.【练3】在平面直角坐标系内原点O(0,0)第一次跳动到点A1(0,1),第二次从点A1跳动到点A2(1,2),第三次从点A2跳动到点A3(﹣1,3),第四次从点A3跳动到点A4(﹣1,4),…,按此规律下去,则点A2021的坐标是()A.(673,2021)B.(674,2021)C.(﹣673,2021)D.(﹣674,2021)【答案】B【解析】解:因为A1(0,1),A2(1,2),A3(﹣1,3),A4(﹣1,4),A5(2,5),A6(﹣2,6),A7(﹣2,7),A8(3,8),…A3n﹣1(n,3n﹣1),A3n(﹣n,3n),A3n+1(﹣n,3n+1)(n为正整数),∵3×674﹣1=2021,∴n=674,所以A2021(674,2021),故选:B.【例4】如图,在平面直角坐标系中,有若干个横纵坐标分别为整数的点,其顺序按图中“→”方向排列,如(1,0),(2,0),(2,1)(1,1),(1,2),(2,2)……根据这个规律,第2022个点的坐标为________【答案】(45,6)【解析】解:观察图形,可知:第1个点的坐标为(1,0),第4个点的坐标为(1,1),第9个点的坐标为(3,0),第16个点的坐标为(1,3),…,∴第(2n-1)2个点的坐标为(2n-1,0)(n为正整数).∵2025=452,∴第2025个点的坐标为(45,0).又∵2025-3=2022,∴第2022个点在第2025个点的上方3个单位长度处,∴第2022个点的坐标为(45,3).故答案为:(45,3).【练1】如图,一个蒲公英种子从平面直角坐标系的原点O出发,向正东走3米到达点A1,再向正北方向走6米到达点A2,再向正西方向走9米到达点A3,再向正南方向走12米到达点A4,再向正东方向走15米到达点A5,以此规律走下去,当种子到达点A10时,它在坐标系中坐标为()A.(﹣12,﹣12)B.(15,18)C.(15,﹣12)D.(﹣15,18)【答案】B【解析】解:根据题意可知:O A1=3,A1A2=6,A2A3=9,A3A4=12,A4A5=15,A5A6=18,A9A10=30,∴A1点坐标为(3,0),A2点坐标为(3,6),A3点坐标为(﹣6,6),A4点坐标为(﹣6,﹣6),A5点坐标为(9,﹣6),A6点坐标为(9,12),以此类推,A9点坐标为(15,﹣12),所以A10点横坐标为15,纵坐标为﹣12+30=18,∴A10点坐标为(15,18),故选:B.【练2】如图,一个点在第一象限及x轴、y轴上移动,在第一秒钟,它从原点移动到点(1,0),然后按照图中箭头所示方向移动,即(0,0)→(1,0)→(1,1)→(0,1)→(0,2)→…,且每秒移动一个单位,那么第2022秒时,点所在位置的坐标是( )A .(2,44)B .(41,44)C .(44,41)D .(44,2)【答案】【解析】解:观察可发现,点到(0,2)用4=22秒,到(3,0)用9=32秒,到(0,4)用16=42秒,则可知当点离开x 轴时的横坐标为时间的平方,当点离开y 轴时的纵坐标为时间的平方, 此时时间为奇数的点在x 轴上,时间为偶数的点在y 轴上, ∵2022=452﹣3=2025﹣3,∴第2025秒时,动点在(45,0),故第2022秒时,动点在(45,0)向左一个单位,再向上2个单位, 即(44,2)的位置. 故选:D .【练3】如图,在平面直角坐标系中,有若干个整数点,其顺序按图中“→”方向排列,如(1,0),(2,0),(2,1),(3,1),(3,0),(3,−1)…根据这个规律探索可得,第99个点的坐标为( )A.(14,−1)B.(14,0)C.(14,1)D.(14,2)【答案】C【解析】解:在横坐标上,第一列有一个点,第二列有2个点…第n 个有n 个点, 并且奇数列点数对称而偶数列点数y 轴上方比下方多一个, 所以奇数列的坐标为(n,n−12),(n,n−12−1),…,(n,1−n 2);偶数列的坐标为(n,n2),(n,n2−1),…,(n,1−n2), ∵1+2+3+4+……+13=91∴第99个点位于第14列自上而下第7行.−6),即(14,1).代入上式得(14,142故选C.【例5】如图,在平面直角坐标系中,将边长为3,4,5的直角△ABO沿x轴向右滚动到△AB1C1的位置,再到△A1B1C2的位置…依次进行下去,发现A(3,0),A1(12,3),A2(15,0)…那么点A2022的坐标为.【答案】(12135,0)【解析】解:∵∠AOB=90°,点A(3,0),B(0,4),根据勾股定理得AB=5,根据旋转可知:OA+AB1+B1C2=3+5+4=12,所以点A1(12,3),A2(15,0);继续旋转得A3(24,3),A4(27,0);…发现规律:A2n﹣1(12n,3),A2n(12n+3,0),∵2022=2n,∴n=1011,∴点A2022的坐标为(12135,0),故答案为:(12135,0).【练1】如图,动点P从(0,3)出发沿所示方向运动,每当碰到长方形的边时反弹,反弹时反射角等于入射角,当点P第2022次碰到长方形的边时点P的坐标为.【答案】(0,3【解答过程】解:如图所示:经过6次反弹后动点回到出发点(0,3),∵2022÷6=337∴当点P第2022次碰到矩形的边时与P点起点位置重合,∴点P的坐标为(0,3).故答案为:(0,3).【练2】如图,将边长为2的等边三角形沿x轴正方向连续翻折2019次,依次得到点P1,P2,P3,...,P2022,则点P2022的坐标是()A.(2022,2)B.(2022,√3)C.(4043,2)D.(4043, √3)【答案】D【解析】解:由题意可知P1是1P的横坐标是3,P3的横坐标是5,P4的横坐标是7…依此类推下去,P n的横坐标是2n-1,∴P2022的横坐标是2×2022-1=4043纵坐标都是√3,故选:D.连续作旋转变换,依【练3】如图,在直角坐标系中,已知点A(−3,0),B(0,4),对OAB次得到Δ1,Δ2,Δ3,Δ4,…,则∆2022的直角顶点的坐标为______.【答案】(8088,0)【解析】解:∵点A(-3,0)、B(0,4),∴AB=√32+42=5由图可知,每三个三角形为一个循环组依次循环,一个循环组前进的长度为:4+5+3=12,∵2022÷3=674,∴∆2022的直角顶点是第674个循环组的最后一个三角形的直角顶点;∵674×12=8088,∴∆2022的直角顶点的坐标为(8088,0).故答案为(8088,0).【例6】如图,在平面直角坐标系中,边长为1的正方形OA1B1C1的两边在坐标轴上,以它的对角线OB1为边作正方形OB1B2C2,再以正方形OB1B2C2的对角线OB2为边作正方形OB2B3C3,以此类推……则正方形OB2021B2022C2022的顶点B2022的坐标是_____.【答案】(0,-22011)【解析】解:∵正方形OA1B1C1的边长为1,∴OB1=√2∴OB2=2∴B2(0,2),同理可知B3(-2,2),B4(-4,0),B5(-4,-4),B6(0,-8),B7(8,-8),B9(16,16),B10(0,32).由规律可以发现,每经过8次作图后,点的坐标符号与第一次坐标的符号相同,每次正方形的边长变为原来的√2倍,∵2022÷8=252⋯⋯6,∴B8n+6(0,-24n+3),∴B2022(0,-22011).故答案为:(0,-22011).【练1】如图,在平面直角坐标系中,等腰直角三角形OAA1的直角边OA在x轴上,点A1在第一象限,且OA=1,以点A1为直角顶点,0A1为一直角边作等腰直角三角形OA1A2,再以点A2为直角顶点,OA2为直角边作等腰直角三角形OA2A3…依此规律,则点A2022的坐标是_____.【答案】(0,-22011)【解析】解:由等腰直角三角形的性质,可知:A 1(1,1),A 2(0,2),A 3(﹣2,2),A 4(0,﹣4),A 5(﹣4,﹣4),A 6(0,﹣8),A 7(8,﹣8),A 8(16,0),A 9(16,16),A 10(0,32),A 11(﹣32,32),…,∵2022=252×8+6∴点A 8n+6的坐标为(0,24n+3)(n 为自然数).∴点A 2022的坐标为(0,24×252+3),即(0,-22011),故答案为:(0,-22011).【练2】在平面直角坐标系中,正方形ABCD 的位置如图所示,点A 的坐标为(1,0),点D 的坐标为(0,2).长CB 交x 轴于点A 1,作正方形A 1B 1C 1C ;延长C 1B 1交x 轴于点2A ,作正方形A 2B 2C 2C 1……按这样的规律进行下去,第2022个正方形的面积为_____.【答案】5×(32)4042.【解析】解:∵点A 的坐标为(1,0),点D 的坐标为(0,2)∴正方形ABCD 的边长为√5,设其面积为S 1=5,依此类推,接下来的面积依次为S 2,S 3,S 4⋯⋯第2022个正方形的面积为S 2022,又∵三角形相似,∴ OA OD =A 1B AB =A 2B 1A 1B 1=⋯=12. ∴ S 2=5×94,S 3=5×(94)2…… ∴S 2022=5×(94)2022−1=5×(94)2021=5×(32)4042.【练3】如图,在平面直角坐标系xOy中,B1(0,1),B2(0,3),B3(0,6),B4(0,10),…,以B1B2为对角线作第一个正方形A1B1C1B2,以B2B3为对角线作第二个正方形A2B2C2B3,以B3B4为对角线作第三个正方形A3B3C3B4,…,如果所作正方形的对角线B n B n+1都在y 轴上,且B n B n+1的长度依次增加1个单位长度,顶点A n都在第一象限内(n≥1,且n为整数),那么A1的纵坐标为;用n的代数式表示A n的纵坐标:.【答案】2;【解析】解:作A1D⊥y轴于点D,则B1D=B1B2÷2=(3﹣1)÷2=1,∴A1的纵坐标=B1D+B1O=1+12,同理可得A2的纵坐标=OB2+(B2B3)÷2=3+(6﹣3)÷2 4.5,∴A n的纵坐标为,故答案为2,.。
平面直角坐标系中的动点问题初一
在平面直角坐标系中,动点问题涉及到描述物体运动轨迹和位置变化的问题。
一般情况下,我们使用x轴和y轴来表示平面直角坐标系。
在动点问题中,通常我们需要给出动点的起始位置和速度等运动参数,然后根据问题要求来分析动点的运动轨迹。
举例来说,如果一个物体的起始位置在坐标原点(0,0),它以每秒1单位的速度沿着x轴正方向运动,那么可以通过速度×时间的公式来计算物体在t秒后的位置,即(x,y) = (1t, 0)。
还有一些常见的动点问题,比如:
1. 若动点A在t时刻的位置为(x,y),那么在t+1时刻的位置是多少?
2. 若动点A在t=0时刻的位置为(0, 0),它以每秒2单位的速度沿着x轴正方向运动,那么在t秒后的位置是多少?
3. 若动点A在t=0时刻的位置为(0, 2),它以每秒3单位的速度沿着y轴负方向运动,那么在t秒后的位置是多少?
这些问题的解答需要根据给定的运动参数和问题要求来确定物体的位置变化。
在解答过程中,我们可以运用坐标系中的几何概念和运动学知识来分析和计算。
希望以上内容对你有所帮助!。