浅谈加权最小二乘法及其残差图
- 格式:doc
- 大小:301.00 KB
- 文档页数:8

加权最小二乘定位算法-概述说明以及解释1.引言1.1 概述加权最小二乘定位算法是一种用于定位和测量的数学方法,通过对测量数据进行加权处理,可以更准确地计算出目标的位置信息。
这种定位算法在无线通信、室内定位、导航系统等领域有着广泛的应用,能够提高定位的精度和可靠性。
本文将介绍加权最小二乘定位算法的原理、应用和优势,同时对其发展前景进行展望,旨在帮助读者更深入地了解和应用这一定位算法。
1.1 概述部分的内容1.2 文章结构本文主要分为引言、正文和结论三部分。
引言部分将对加权最小二乘定位算法进行概述,并介绍文章的结构和目的。
正文部分将详细介绍加权最小二乘定位算法的原理、应用和优势。
结论部分将总结加权最小二乘定位算法的特点,并展望其未来的发展前景,为读者提供对该算法的全面了解和展望。
通过这样的结构,读者可以系统地学习和理解加权最小二乘定位算法的相关知识,并对其未来的发展方向有一个清晰的认识。
1.3 目的本篇文章旨在介绍加权最小二乘定位算法的原理、应用和优势。
通过对加权最小二乘定位算法的深入理解和分析,读者可以更好地了解该算法在定位领域的作用和意义。
同时,我们也将总结该算法的优势和未来发展前景,以及对其在实际应用中的展望。
通过本文的阐述,希望能够为相关领域的研究者和实践者提供有益的参考和启发。
法的展望": {}}}}请编写文章1.3 目的部分的内容2.正文2.1 加权最小二乘定位算法原理加权最小二乘定位算法原理加权最小二乘定位算法是一种基于数学模型的定位方法,其原理是通过对测量结果进行加权处理,利用加权最小二乘法来估计目标的位置。
这种算法可以有效地处理具有噪声和误差的测量数据,提高定位精度和稳定性。
该算法的原理主要包括以下几个步骤:1.数据预处理:首先对收集到的定位数据进行预处理,包括滤波、去除异常值等操作,以保证数据的准确性和可靠性。
2.数学建模:根据实际定位场景和信号传播特性,建立数学模型,描述目标与测量节点之间的空间关系和信号传播规律。
2 最小二乘残差法 raim 算法原理最小二乘残差法(Least Squares Residual Method)是一种常用的线性回归分析方法。
它的主要思想是通过寻找最小化数据点与拟合直线之间距离平方和的方法来确定最佳拟合直线的系数。
在实际应用中,该方法被广泛应用于数据分析、信号处理、机器学习等领域。
一、基本原理1.1 模型假设在进行最小二乘残差法分析时,我们通常假设数据点服从一个线性模型,即:y = β0 + β1x1 + β2x2 + … + βnxn + ε其中,y表示因变量,x1, x2, …, xn表示自变量,β0, β1, …, βn表示系数,ε表示误差项。
我们希望通过最小化误差项的平方和来确定系数。
1.2 求解过程对于给定的数据点集合{(xi,yi)}i=1,n,我们需要求解出系数β0, β1, …,βn使得误差项ε的平方和最小。
具体地说,我们需要构造一个目标函数J(β)来描述误差项ε与系数β之间的关系,并通过求解该目标函数的极值来得到最佳拟合直线的系数。
目标函数J(β)的定义如下:J(β) = Σ(yi - β0 - β1xi1 - β2xi2 - … - βn xin)^2其中,Σ表示对所有数据点求和。
我们需要通过对目标函数J(β)进行求导来得到其极值点。
为了简化计算,我们可以将目标函数J(β)写成矩阵形式:J(β) = (Y - Xβ)^T(Y - Xβ)其中,Y是n维列向量,表示所有数据点的因变量;X是n×(k+1)维矩阵,表示所有数据点的自变量及其系数;β是(k+1)维列向量,表示所有系数。
将目标函数J(β)对系数β求导并令其等于0,得到如下方程组:X^T(Xβ - Y) = 0该方程组可以通过矩阵运算来求解。
具体地说,我们可以先计算出X^TX和X^TY两个矩阵,并用它们来解出系数向量β。
二、RAIM算法原理RAIM(Receiver Autonomous Integrity Monitoring)算法是一种用于GPS接收机自主监测其位置解算的方法。
加权最小二乘回归系数的估计计算过程1. 概述加权最小二乘回归是一种对数据进行线性建模的方法,在现实应用中经常被使用。
通过加权最小二乘回归,我们可以得到对数据的线性关系进行建模的最佳拟合直线,并估计出各个自变量的系数。
本文将详细介绍加权最小二乘回归系数的估计计算过程,以便读者能够深入了解这一方法的原理和实现。
2. 加权最小二乘回归的基本原理加权最小二乘回归方法是最小化因变量的观测值与回归函数预测值之间的加权残差平方和来确定回归系数的方法。
其数学表达式为:(1)min∑wi(yi - β0 - β1xi1 - ... - βpxip)^2其中wi是观测值的权重,yi表示因变量的观测值,β0是截距项,β1到βp为自变量系数,xi1到xip为自变量观测值。
3. 加权最小二乘回归系数的估计计算步骤加权最小二乘回归系数的估计计算过程可以分为以下几个步骤:(1)计算加权变量根据给定的权重,对自变量和因变量进行加权变换,得到加权后的自变量和因变量。
(2)构建加权矩阵根据加权后的自变量和因变量,构建加权矩阵。
加权矩阵是一个n×(p+1)的矩阵,其中n为样本量,p为自变量的个数。
(3)计算加权矩阵的转置矩阵对加权矩阵进行转置,得到加权矩阵的转置矩阵。
(4)计算加权矩阵的乘积将加权矩阵和其转置矩阵相乘,得到乘积矩阵。
(5)计算乘积矩阵的逆矩阵对乘积矩阵进行求逆运算,得到逆矩阵。
(6)计算加权矩阵和因变量的乘积将加权矩阵和因变量相乘,得到乘积向量。
(7)计算回归系数利用逆矩阵和乘积向量,通过线性代数方法计算得到回归系数的估计值。
4. 加权最小二乘回归的优势加权最小二乘回归相对于普通最小二乘回归的优势在于,它能够更好地处理数据的异方差性。
在普通最小二乘回归中,对所有观测值一视同仁,忽略了不同观测值的方差可能不同的情况。
而通过加权最小二乘回归,我们可以根据数据的特点赋予不同观测值不同的权重,从而更准确地估计回归系数。
加权最小二乘法(Weighted Least Squares, WLS)是一种经典的拟合方法,用于处理数据中的噪声和异常值。
在拟合多项式的过程中,加权最小二乘法能够更好地适应不同的数据权重,从而得到更准确、更可靠的拟合结果。
结合Matlab强大的数学计算和可视化工具,我们可以更方便、更高效地实现加权最小二乘法拟合多项式。
一、加权最小二乘法的基本原理1. 加权最小二乘法的概念在拟合多项式过程中,常常会遇到数据噪声较大或者部分数据异常值较大的情况。
此时,普通的最小二乘法可能无法有效地拟合数据,因此需要引入加权最小二乘法。
加权最小二乘法通过为每个数据点赋予不同的权重,对异常值和噪声进行更有效的处理。
2. 加权最小二乘法的数学原理加权最小二乘法的数学原理主要是在最小化误差的基础上,引入权重矩阵来调整不同数据点的重要性。
通过优化残差的加权和,可以得到适应不同权重的拟合结果。
二、Matlab中的加权最小二乘法1. Matlab工具Matlab提供了丰富的数学计算和拟合工具,通过内置的polyfit函数和curve fitting工具箱,可以方便地实现加权最小二乘法拟合多项式。
Matlab还提供了丰富的可视化工具,可以直观展示加权最小二乘法的拟合效果。
2. 加权最小二乘法的实现在Matlab中,可以通过指定权重向量来调用polyfit函数,实现加权最小二乘法拟合多项式。
利用Matlab内置的拟合评估工具,可以对拟合效果进行全面评估和优化。
三、实例分析以实际数据为例,我们可以在Matlab环境下进行加权最小二乘法的拟合多项式实例分析。
通过构建数据模型、指定权重、调用polyfit函数并结合可视化工具,可以全面了解加权最小二乘法在拟合多项式中的应用效果。
四、个人观点和总结在实际工程和科学研究中,加权最小二乘法拟合多项式是一种非常有效和重要的数据处理方法。
结合Matlab强大的数学计算和可视化工具,可以更方便、更高效地实现加权最小二乘法拟合多项式。
第七章 最小二乘法最小二乘法是实验数据处理的一种基本方法。
它给出了数据处理的一条准则,即在最小二乘以一下获得的最佳结果(或最可信赖值)应使残差平方和最小。
基于这一准则所建立的一整套的理论和方法,为随机数据的处理提供了行之有效的手段,成为实验数据处理中应用十分广泛的基础内容之一。
自1805年勒让得(Legendre )提出最小二乘法以来,这一方法得到了迅速发展,并不断完善,成为回归分析、数理统计等方面的理论基础之一,广泛地应用于天文测量,大地测量及其他科学实验的数据处理中。
现代,矩阵理论的发展及电子计算机的广泛应用,为这一方法提供了新的理论工具和得力的数据处理手段。
随着计量技术及其他现代科学技术的迅速发展,最小二乘法在各学科领域将获得更为广泛的应用。
本章仅涉及独立的测量数据的最小二乘法处理。
以等精度线性参数的最小二乘法为中心,叙述最小二乘法原理,正规方程和正规方程的解,以及最小二乘估计的精度估计。
最后给出测量数据最小二乘法处理的几个例子。
7 .1 最小二乘法原理县考察下面的例子。
设有一金属尺,在温度()C t ︒条件下的长度可表示)1(0t y y t α+=式中 y 0——温度为0°C 时的金属尺的长度;α——金属材料的线膨胀系数; t ——测量尺长时的温度。
现要求给出y 0与α的数值。
为此,可在t 1与t 2两个温度条件下分别测得尺的长度l 1与l 2,得方程组()()⎭⎬⎫+=+=20210111t y l t y l αα由此可解得y 0与α。
事实上,由于测量结果l 1与l 2含有测量误差,所得到的y 0与α的值也含有误差。
显而易见,为减小所得y 0与α值的误差,应增加y t 的测量次数,以便利用抵偿性减小测量误差的影响。
设在n t t t ,,,21 温度条件下分别测得金属尺的长度n l l l ,,,21 共n 个结果,可列出方程组⎪⎪⎭⎪⎪⎬⎫+=+=+=)1()1()1(0202101n n t y l t y l t y l ααα)1(0t y y t α+=但由于方程式的数目n 多于待求量的数目,所以无法直接利用代数法求解上述方程组。
一、概述最小二乘法(Least Squares Method)是一种常用的数学优化方法,通过最小化残差的平方和来拟合实际数据与理论模型之间的关系。
在实际应用中,我们常常需要对数据进行加权处理,以提高拟合效果和准确度。
而Matlab作为一种强大的数学建模和仿真软件,提供了丰富的函数和工具来实现加权最小二乘法的拟合编程。
二、加权最小二乘法原理1. 最小二乘法原理最小二乘法是一种常用的拟合方法,通过最小化实际观测值和理论值之间的误差来寻找最佳拟合曲线或曲面。
其数学表达为:minimize ||Ax - b||^2其中A为设计矩阵,x为拟合参数,b为观测值向量。
最小二乘法可以看作是一种优化问题,通过求解参数x的最优值来实现最佳拟合。
2. 加权最小二乘法原理在实际情况下,我们往往会遇到观测值有不同的权重或方差的情况,此时可以使用加权最小二乘法来提高拟合效果。
加权最小二乘法的数学表达为:minimize ||W^(1/2)(Ax - b)||^2其中W为权重矩阵,将不同观测值的权重考虑在内,通过加权的方式来优化拟合效果。
三、Matlab实现加权最小二乘法1. 数据准备在进行加权最小二乘法的拟合编程前,首先需要准备实际观测数据和设计矩阵A。
还需要考虑观测值的权重矩阵W,根据实际情况来确定不同观测值的权重。
2. 加权最小二乘法函数Matlab提供了丰富的函数和工具来实现加权最小二乘法的拟合。
其中,可以使用lsqcurvefit或lsqnonlin等函数来进行加权最小二乘法的拟合计算。
通过传入设计矩阵A、观测值向量b和权重矩阵W,以及拟合参数的初始值,来实现加权最小二乘法的拟合计算。
3. 拟合结果评估完成加权最小二乘法的拟合计算后,我们需要对拟合结果进行评估。
主要包括残差分析、拟合效果的可视化等方面。
通过分析残差的分布和拟合曲线与实际观测值的符合程度,来评估拟合效果的优劣。
四、实例分析1. 示例一:线性模型拟合假设我们有一组线性关系的实际观测数据,且各观测值具有不同的权重。
测绘技术中的最小二乘平差原理解析测绘技术作为一门重要的测量科学,广泛应用于土地规划、建筑设计、地质勘探等领域。
而在测绘技术中,最小二乘平差原理是一种重要的数据处理方法。
本文将对最小二乘平差原理进行解析,揭示其在测绘技术中的应用和意义。
1. 最小二乘平差原理的概念和基本思想最小二乘平差原理是指通过对多组观测数据进行加权求和,使得加权残差的平方和最小。
最小二乘平差原理的基本思想是利用观测数据建立数学模型,通过最小化残差来获得最优解。
最小二乘平差原理的核心是建立目标函数,即将观测值与预测值之间的差异最小化。
通过构建目标函数,可以建立数学模型,得到一组准确的测量结果。
最小二乘平差原理在测绘技术中具有重要的应用价值。
2. 最小二乘平差原理在测绘技术中的应用最小二乘平差原理在测绘技术中应用广泛,主要包括以下几个方面:(1)测量数据处理最小二乘平差原理在测量数据处理中起到关键作用。
通过对一系列测量数据进行加权平差,可以得到更加准确的测量结果。
最小二乘平差原理可以根据观测值的精度进行加权处理,避免了测量误差的累积。
(2)测量误差分析最小二乘平差原理可用于对测量误差进行分析。
通过对观测数据进行平差处理,可以得到残差,进而分析测量数据中的误差来源。
这对于测绘工作者改进测量方法、提高测量精度具有重要意义。
(3)控制点协调计算最小二乘平差原理被广泛应用于控制点协调计算。
在测绘工程中,控制点的坐标是基础,直接关系到整个测绘工程的质量。
通过最小二乘平差原理进行控制点协调计算,可以提高测量结果的精度,保证工程的准确性。
(4)测图数据处理最小二乘平差原理在测图数据处理中也有着重要应用。
在进行地形图绘制和地图生成过程中,需要对大量观测数据进行处理和分析。
通过最小二乘平差原理,可以实现地图数据精度的提高,并且能够有效地解决地图表达的问题。
3. 最小二乘平差原理的意义和展望最小二乘平差原理在测绘技术中有着重要的意义。
它不仅可以提高测量数据的准确性,还可以对测量误差进行分析,为工程建设提供可靠的数据支持。
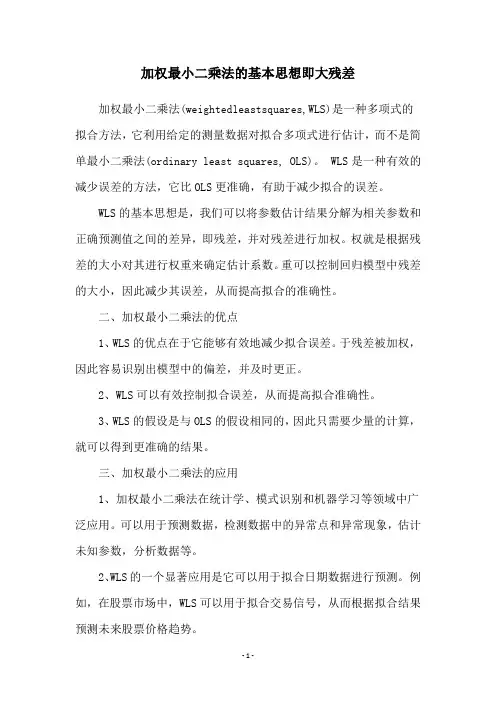
加权最小二乘法的基本思想即大残差加权最小二乘法(weightedleastsquares,WLS)是一种多项式的拟合方法,它利用给定的测量数据对拟合多项式进行估计,而不是简单最小二乘法(ordinary least squares, OLS)。
WLS是一种有效的减少误差的方法,它比OLS更准确,有助于减少拟合的误差。
WLS的基本思想是,我们可以将参数估计结果分解为相关参数和正确预测值之间的差异,即残差,并对残差进行加权。
权就是根据残差的大小对其进行权重来确定估计系数。
重可以控制回归模型中残差的大小,因此减少其误差,从而提高拟合的准确性。
二、加权最小二乘法的优点1、WLS的优点在于它能够有效地减少拟合误差。
于残差被加权,因此容易识别出模型中的偏差,并及时更正。
2、WLS可以有效控制拟合误差,从而提高拟合准确性。
3、WLS的假设是与OLS的假设相同的,因此只需要少量的计算,就可以得到更准确的结果。
三、加权最小二乘法的应用1、加权最小二乘法在统计学、模式识别和机器学习等领域中广泛应用。
可以用于预测数据,检测数据中的异常点和异常现象,估计未知参数,分析数据等。
2、WLS的一个显著应用是它可以用于拟合日期数据进行预测。
例如,在股票市场中,WLS可以用于拟合交易信号,从而根据拟合结果预测未来股票价格趋势。
3、在医学方面,加权最小二乘法可以用于分析肿瘤数据,从而更准确地预测病人的疾病和预后。
四、加权最小二乘法的基本思想即大残差1、加权最小二乘法的基本思想是在进行参数估计时,将参数估计结果拆分为相关参数和正确预测值之间的差异,即残差,并对残差进行加权。
过加权,模型中的残差可以得到控制,因此可以减少误差,从而提高拟合的准确性。
2、残差的大小取决于安装的模型的精确性。
确的模型会产生更小的残差,而错误的模型会产生更大的残差。
过比较残差的大小,可以识别模型中出现的错误,并及时纠正。
3、WLS通过应用权重来加权残差,从而消除参数估计中的误差。
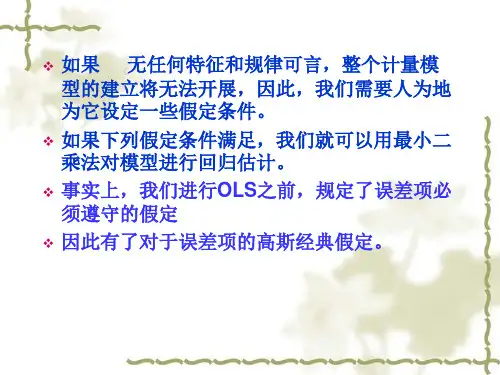
浅谈加权最小二乘法及其残差图关键词:异方差;加权最小二乘法;残差图;SPSS一、引言好几年没有翻《统计研究》了。
最近,有一同行朋友打电话告诉我《统计研究》2005年第11期上刊登了一篇有关我与刘文卿合作编著的《应用回归分析》(2001.6.中国人民大学出版社)教材的文章。
赶紧找到这期的《统计研究》,看到其中孙小素副教授的文章《加权最小二乘法残差图问题探讨——与何晓群教授商榷》一文,以下简称《孙文》。
认真拜读后感触良多。
首先衷心感谢孙小素副教授阅读了我们《应用回归分析》拙作的部分章节,同时感谢《统计研究》给我们提供这样一个好的机会,使我们能够借助贵刊对加权最小二乘法的有关问题谈谈更多的认识。
《孙文》谈到《应用回归分析》教材中有关加权最小二乘法残差图的问题。
摆出了与加权最小二乘法相关的三类残差图,指出第三类残差图的局限性。
直接的问题是三类残差图的作用,而更深层的原因应该是对加权最小二乘法统计思想的理解和认识上的差异。
二、对加权最小二乘法的认识1. 加权最小二乘估计方法拙作《应用回归分析》中对加权最小二乘法有详尽的讲述,这里仅做简要介绍。
多元线性回归方程普通最小二乘法的离差平方和为:∑=----=n i ip p i i p x x y Q 1211010)(),,,(ββββββ(1)普通最小二乘估计就是寻找参数p βββ,,,10 的估计值pβββˆ,,ˆ,ˆ10 使式(1)的离差平方和Q 达极小。
式(1)中每个平方项的权数相同,是普通最小二乘回归参数估计方法。
在误差项i ε等方差不相关的条件下,普通最小二乘估计是回归参数的最小方差线性无偏估计。
然而在异方差的条件下,平方和中的每一项的地位是不相同的,误差项i ε的方差2i σ大的项,在式(1)平方和中的取值就偏大,在平方和中的作用就大,因而普通最小二乘估计的回归线就被拉向方差大的项,方差大的项的拟合程度就好,而方差小的项的拟合程度就差。
由式(1)求出的pβββˆ,,ˆ,ˆ10 仍然是p βββ,,,10 的无偏估计,但不再是最小方差线性无偏估计。
简述最小二乘法原理最小二乘法原理是一种常用的参数估计方法,它在统计学和数学建模中被广泛应用。
最小二乘法的基本思想是通过最小化观测值与模型预测值之间的残差平方和来确定模型参数,从而使得模型的拟合效果最优。
在实际应用中,最小二乘法可以用于拟合曲线、回归分析、数据平滑等多个领域。
最小二乘法的原理可以通过简单的线性回归模型来进行解释。
假设我们有一组观测数据$(x_1, y_1), (x_2, y_2), ..., (x_n, y_n)$,我们希望找到一条直线$y = ax +b$来拟合这些数据。
最小二乘法的目标是找到最优的参数$a$和$b$,使得所有观测数据到直线的距离之和最小。
具体来说,我们希望最小化残差平方和$S =\sum_{i=1}^{n}(y_i (ax_i + b))^2$。
通过对残差平方和关于参数$a$和$b$的偏导数进行求解,可以得到最优的参数估计值。
除了线性回归模型外,最小二乘法还可以推广到非线性模型的拟合。
对于一般的非线性模型$y = f(x, \beta)$,其中$\beta$表示模型的参数,最小二乘法的原理仍然是最小化观测值与模型预测值之间的残差平方和。
通过迭代的方法,可以逐步优化模型参数的估计值,从而得到最优的拟合效果。
最小二乘法的优点在于它具有良好的数学性质和稳定的估计结果。
同时,最小二乘法也可以通过统计学的方法进行参数估计的显著性检验和模型拟合效果的评估。
因此,最小二乘法在实际应用中具有较高的可靠性和灵活性。
然而,最小二乘法也存在一些局限性。
首先,最小二乘法对异常值和离群点较为敏感,这可能会对参数估计结果产生较大的影响。
其次,最小二乘法要求模型的假设条件较为严格,例如线性回归模型要求自变量和因变量之间的关系是线性的。
在实际应用中,如果模型的假设条件不满足,最小二乘法的估计结果可能会失真。
总的来说,最小二乘法是一种简单而有效的参数估计方法,它在数据拟合和模型建立中具有重要的应用价值。
第四章 最小二乘法与组合测量§1概述最小二乘法是用于数据处理和误差估计中的一个很得力的数学工具。
对于从事精密科学实验的人们来说,应用最小乘法来解决一些实际问题,仍是目前必不可少的手段。
例如,取重复测量数据的算术平均值作为测量的结果,就是依据了使残差的平方和为最小的原则,又如,在本章将要用最小二乘法来解决一类组合测量的问题。
另外,常遇到用实验方法来拟合经验公式,这是后面一章回归分析方法的内容,它也是以最小二乘法原理为基础。
最小二乘法的发展已经经历了200多年的历史,它最先起源于天文和大地测量的需要,其后在许多科学领域里获得了广泛应用,特别是近代矩阵理论与电子计算机相结合,使最小二乘法不断地发展而久盛不衰。
本章只介绍经典的最小二乘法及其在组合测量中的一些简单的应用,一些深入的内容可参阅专门的书籍和文献。
§2最小二乘法原理最小二乘法的产生是为了解决从一组测量值中寻求最可信赖值的问题。
对某量x 测量一组数据n x x x ,,,21 ,假设数据中不存在系统误差和粗大误差,相互独立,服从正态分布,它们的标准偏差依次为:n σσσ ,,21记最可信赖值为x ,相应的残差x x v i i -=。
测值落入),(dx x x i i +的概率。
dx v P i i ii )2exp(2122σπσ-=根据概率乘法定理,测量n x x x ,,,21 同时出现的概率为n i ii ni i dx v P P )]()(21exp[)2(12∑-∏=∏=σπσ 显然,最可信赖值应使出现的概率P 为最大,即使上式中页指数中的因子达最小,即∑=iii Min v 22σ权因子:22o i i w σσ=即权因子i w ∝21iσ,则2[]i i wvv wv Min ==∑再用微分法,得最可信赖值x11ni ii nii w xx w===∑∑ 即加权算术平均值这里为了与概率符号区别,以i ω表示权因子。
加权最小二乘法
加权最小二乘法(weighted least squares, WLS)是一种线性回归的方法,用于处理具有不同观测误差方差的数据。
在普通最小二乘法(ordinary least squares, OLS)中,假设所有的观测误差方差是相等的。
但在实际应用中,有一
些变量可能有更大的观测误差,或者某些观测点可能有更
大的误差。
WLS通过对不同观测点赋予不同的权重来解决
这个问题,权重的大小与观测误差的方差成反比。
加权最小二乘法的目标是最小化加权残差的平方和,即最
小化:
\\[S = \\sum_{i=1}^{n} w_i(y_i - f(x_i))^2\\]
其中,$n$为观测点数量,$w_i$为第$i$个观测点的权重,$y_i$为第$i$个观测点的观测值,$f(x_i)$为模型对第$i$个观测点的预测值。
为了最小化$S$,可以通过求解加权最小二乘问题的正规方程来获得参数的估计值,即求解:
\\[(X^TWX)\\hat{\\beta} = X^TWy\\]
其中,$X$为设计矩阵,包含自变量的观测值,
$\\hat{\\beta}$为参数的估计值,$W$为权重矩阵,对角线上的元素为权重值,其他元素为零。
通过求解正规方程,可以获得参数的估计值
$\\hat{\\beta}$,进而用于预测新的观测值或进行模型的推断分析。
需要注意的是,加权最小二乘法的权重选择需要根据具体的实际情况来确定,通常可以通过观察观测数据的方差不均匀性、残差分析等方法来确定权重值。
加权最小二乘法的基本思想即大残
差平方
和最小法
加权最小二乘法(Weighted Least Squares Method, WLSM)是统计学中进行参数估计的一种重要方法。
它的基本思想是使用极小化大残差平方和最小法(Large Residual Sum of Squares)对参数进行估计或拟合。
其中,每个观测值都有一个不同的权重,即观测值的可信度,权重可以是固定的,也可以是可变的。
该方法在处理有限样本数据时,特别适用于满足正态分布的数据。
WLSM的基本步骤如下:
(1)确定权重w:可以手动指定,也可以从数据分布中自动求出。
(2)根据观测值和权重,构造误差平方和函数S
(x1,x2,…,xn),其中x1,x2,…,xn为待估计参数。
(3)求取S(x1,x2,…,xn)在各个参数上的偏导数,当这些偏导数全为0时,即为参数的最小值。
(4)使用梯度下降法等数值方法求解上述参数的最小值。
浅谈加权最小二乘法及其残差图——兼答孙小素副教授何晓群 刘文卿ABSTRACTThe paper introduces some problems in relation to weighted least square regression ,and answers a question about weighted residual plots.关键词:异方差;加权最小二乘法;残差图;SPSS一、引言好几年没有翻《统计研究》了。
最近,有一同行朋友打电话告诉我《统计研究》2005年第11期上刊登了一篇有关我与刘文卿合作编著的《应用回归分析》(2001.6.中国人民大学出版社)教材的文章。
赶紧找到这期的《统计研究》,看到其中孙小素副教授的文章《加权最小二乘法残差图问题探讨——与何晓群教授商榷》一文,以下简称《孙文》。
认真拜读后感触良多。
首先衷心感谢孙小素副教授阅读了我们《应用回归分析》拙作的部分章节,同时感谢《统计研究》给我们提供这样一个好的机会,使我们能够借助贵刊对加权最小二乘法的有关问题谈谈更多的认识。
《孙文》谈到《应用回归分析》教材中有关加权最小二乘法残差图的问题。
摆出了与加权最小二乘法相关的三类残差图,指出第三类残差图的局限性。
直接的问题是三类残差图的作用,而更深层的原因应该是对加权最小二乘法统计思想的理解和认识上的差异。
二、对加权最小二乘法的认识1. 加权最小二乘估计方法拙作《应用回归分析》中对加权最小二乘法有详尽的讲述,这里仅做简要介绍。
多元线性回归方程普通最小二乘法的离差平方和为:∑=----=ni ip p i i p x x y Q 1211010)(),,,(ββββββ(1)普通最小二乘估计就是寻找参数p βββ,,,10 的估计值pβββˆ,,ˆ,ˆ10 使式(1)的离差平方和Q 达极小。
式(1)中每个平方项的权数相同,是普通最小二乘回归参数估计方法。
在误差项i ε等方差不相关的条件下,普通最小二乘估计是回归参数的最小方差线性无偏估计。
然而在异方差的条件下,平方和中的每一项的地位是不相同的,误差项i ε的方差2i σ大的项,在式(1)平方和中的取值就偏大,在平方和中的作用就大,因而普通最小二乘估计的回归线就被拉向方差大的项,方差大的项的拟合程度就好,而方差小的项的拟合程度就差。
由式(1)求出的pβββˆ,,ˆ,ˆ10 仍然是p βββ,,,10 的无偏估计,但不再是最小方差线性无偏估计。
加权最小二乘估计的方法是在平方和中加入一个适当的权数i w ,以调整各项在平方和中的作用,加权最小二乘的离差平方和为:∑=----=ni ip p i i i p w x x y w Q 1211010)( ),,,(ββββββ (2)加权最小二乘估计就是寻找参数p βββ,,,10 的估计值pww w βββˆ,,ˆ,ˆ10 使式(2)的离差平方和w Q 达极小。
所得加权最小二乘经验回归方程记做ppw w w w x x y βββˆˆˆˆ110+++= (3)理论上最优的权数i w 为误差项方差2i σ的倒数,即21ii w σ=(4)误差项方差大的项接受小的权数,以降低其在式(2)平方和中的作用; 误差项方差小的项接受大的权数,以提高其在平方和中的作用。
由(2)式求出的加权最小二乘估计pww w βββˆ,,ˆ,ˆ10 就是参数p βββ,,,10 的最小方差线性无偏估计。
一个需要解决的问题是误差项的方差2i σ是未知的,因此无法真正按照式(4)选取权数。
在实际问题中误差项方差2i σ通常与自变量的水平有关,可以利用这种关系确定权数。
例如2i σ与第j 个自变量取值的平方成比例时,即2i σ=k 2ij x 时,这时取权数为21iji x w = (5)更一般的情况是误差项方差2i σ与某个自变量j x 取值的幂函数m ij x 成比例,即2i σ=k mij x ,其中m 是待定的未知参数。
此时权数为m iji x w 1=(6) 这时确定权数i w 的问题转化为确定幂参数m 的问题,可以借助SPSS 软件解决。
《应用回归》书中和《孙文》中都讲了这个方法,本文不再重述。
需要注意的是,在实际问题中比例关系2i σ=k mij x 只是近似的,式(6)确定的权数i w 只是式(4)最优权数的近似值,因此所得的参数最小二乘估计也只是近似的最小方差线性无偏估计。
2. 变量变换的加权最小二乘法《孙文》中谈到:加权最小二乘法的实质是要对原始数据实施变换,获得新的解释变量和被解释变量,变换的方法是:2m jx y y -⋅=' (y '表示变换后的被解释变量) (7)2m j h hx x x -⋅=',h =0,1,2,……,p (hx '是对应于原始变量h x 的新解释变量) (8)对变换后的变量(p x x x y '''',,,,10)重新进行普通最小二成估计(注意,此处的回归模型不包含常数项,增加了数据变换后派生出的一个新解释变量2mj x x -='),即可得到加权最小二乘法的经验回归方程:p pw w w w x x x y '++'+'='βββˆˆˆˆ1100 (9)以上是《孙文》中对加权最小二乘法的解释,其中公式(7)、(8)、(9)分别对应《孙文》中的公式(3)、(4)、(5)。
3. 两种方法的异同相同之处。
显然,式(3)与式(9)两个回归方程是等价的,把式(3)同时乘以2mjx w -=后就转化为式(9)。
不同之处。
首先,式(3)的回归方程ppw w w w x x y βββˆˆˆˆ110+++= 使用起来比较方便,因为利用该回归方程进行预测和控制时,无须按式(8)变换自变量的新值,直接将自变量的新值代入式(3)即可。
对这一点孙小素副教授也是认同的。
其实,所有方法的优劣评价根本就在于他是否方便于建模最终的应用。
其次,虽然两种加权回归方法所得的回归方程是等价的,但是对回归效果的拟合优度和检验是不同的,式(3)的加权最小二乘的总离差平方和、回归离差平方和、残差平方和的计算公式和关系为:∑∑∑===+-=-n i ni iw i w iw i ni w ii e w y y w y yw 112212)ˆ()( (10)其中w y 是i y 用i w 加权的算术平均数。
由于式(9)的变换加权最小二乘回归方程不含常数项,所以不满足离差平方和分解式,而是对直接的平方和满足分解式,总平方和、回归平方和、残差平方和的计算公式和关系为:∑∑∑==='+'='ni ni iw iwni i e y y 112212ˆ (11)等价于∑∑∑===+=ni ni iw i iwini ii e w yw y w 112212ˆ (12) 对不含常数项的普通最小二乘回归,SPSS 软件就是用上述公式计算平方和并进而计算判定系数2R 和做F 检验的。
然而,这种做法的合理性是有欠缺的,因为总平方和∑='ni i y 12不能如实反映因变量的变差,仅是为了满足平方和分解式而这样做,有削足适履的嫌疑。
另外一种做法是以∑='-'ni y y 12)(作为总离差平方和,把∑∑=='-'-'n i ni iwie y y 1122)(作为回归离差平方和,而不使用∑='-'ni iwy y12)ˆ(作为回归离差平方和,Excel 软件不含常数项(即指定常数项为零)的普通最小二乘回归就是采用的这个方法。
对《孙文》所引用的《应用回归分析》例题,有关的计算结果见表1(a )—(d )。
从表中可以清楚看出用变换加权最小二乘法计算离差平方和存在明显的问题,判定系数2R 和检验统计量F 严重失真。
对同样的数据做变换加权最小二乘估计,市面上流行的不同软件的拟合优度检验却差别很大,SPSS 软件计算出的F =442.2,2R =0.968;Excel 软件计算出的F =74.26,2R =0.837。
对其他数值就不逐一对比了。
针对上述问题,变换加权最小二乘法实际上常用于式(5)成立的情况,即m =2,此时变换后的自变量j x '≡1,回归参数j β就相当于回归常数项了,对变换后的数据就可以用含有常数项的普通最小二乘估计方法,各种统计软件对变换加权最小二乘法回归的拟合优度检验的输出结果就都一致了。
遗憾的是,即使是在这种特殊情况下也仍然与直接用加权最小二乘估计方法不一致,这只需仔细比较两种情况的总离差平方和公式∑='-'ni iy y 12)(和∑=-ni w ii y yw 12)(的差异即可。
这种通过变换变量求解加权最小二乘估计方法的作用是什么呢?引用文献[1]第180页的一段文字给予解释:“许多回归软件包允许用户有选择地使用具体的权数进行加权最小二乘分析。
如果不能选择,通过对观察值的具体变换,使用不加权的最小二乘法,仍能得到加权最小二乘估计量。
”可见通过变换变量求解加权最小二乘估计的方法仅是作为参数估计的一种计算手段而存在的,如果你使用的软件仅具有普通最小二乘功能,就只能用变换变量的方法求解加权最小二乘的参数估计。
《应用回归分析》教材是结合SPSS 软件编写的,而SPSS 软件允许用户直接使用权数进行加权最小二乘分析,不必通过变换变量的方法求解加权最小二乘估计,因此我们在教材中没有给出这种通过变换变量求解加权最小二乘估计的方法。
纵上所述,在拥有像SPSS 这种能够直接计算加权最小二乘估计的软件时,就不必使用变换变量求解加权最小二乘估计的方法了。
即使使用的是变换变量求解加权最小二乘估计的方法,也应该把式(9)变换回式(3)的形式,用来直接表示出原始变量之间的关系。
因此《孙文》把式(9)称为加权最小二乘法的经验回归方程就显然不合适了。
我们也没有见到其他的文献用这个称法。
三、三类残差图的作用以残差为纵坐标轴以自变量(或回归值y ˆ)为横坐标轴画的散点图就是残差图。
《孙文》中的三类残差图如下:1. 普通残差图。
指用原始数据对线性回归模型做普通最小二乘估计所得的普通残差ie 所做的残差图,也就是《孙文》中所称的第一类残差图。
2. 加权普通残差图。
其残差是用原始数据做加权最小二乘估计所得的普通残差w e (在《孙文》中记做w e '),也就是《孙文》中所称的加权派生残差图,或第三类残差图。
3. 加权变换残差图。
其残差是用变换数据做加权最小二乘估计所得的普通残差w e '(在《孙文》中记做w e ),也就是《孙文》中所称的加权残差图,或第二类残差图。