海图基础知识20100812
- 格式:ppt
- 大小:6.46 MB
- 文档页数:28


钢质海船导航设备介绍2010-07-30 2010 07 30Specializing in ship electronic science and technology一、种类 种类 二 原理和配备要求 二、原理和配备要求 三 厂家及大致价格 三、厂家及大致价格Specializing in ship electronic science and technology一、种类 种类二、原理及配备要求 三、厂家及大致价格Specializing in ship electronic science and technologySpecializing in ship electronic science and technology • • • 9方向和方向控制1 x Compass & auto-pilot system 罗经自动舵系统 位置2 x DGPS/GPS差分/全球定位系统(驾驶台显示,天线罗经甲板) 水深1 x Echo Sounder测深仪(驾驶台显示 Sounder测深仪(驾驶台显示,机舱底左右各1探头) 机舱底左右各1探头) 水速1 x Speed LOG计程仪(驾驶台显示,机舱底中间1探头) 风速/向 1 x ANEMOMETER风向风速仪(驾驶台,大桅1探头) 气象1 x Weather Fax气象传真接收机(驾驶台显示,天线罗经甲板) 避碰1 x X-band RADAR/ 1 x S-bank RADAR雷达(驾驶台显示,大桅1天线) 避碰1 x AIS自动识别系统(也可以通讯 AIS自动识别系统(也可以通讯,共用VHF天线) 共用VHF天线) 资料1 x ECDIS电子海图+纸质海图 或2 x ECDIS 电子海图 (驾驶台) 记录1 x VDR航行数据记录仪(驾驶台) 航行 ( ) 监控1 x BNWAS航行值班报警系统(驾驶台) 1 x Bridge design / Console manufacturing 驾驶台设计与台架生产Specializing in ship electronic science and technologySpecializing in ship electronic science and technology1 x Meg.-Compass 操舵磁罗经及信号转化器 1 x Gyro-Compass 操舵电罗经及分罗经 1 x Rudder angle indicator舵角指示仪 1 x Course recorder 航向记录仪器(1万吨以上船) 1 x Steering Control System 操舵控制系统 1 x Autopilot / Track control 自动舵/航迹控制Specializing in ship electronic science and technology1 x Conning System指挥系统(海洋工程船/超大船) 1 x LORAN C 罗兰C (美国沿岸海军定位) 1 x DP 动力定位系统 (海洋工程船,推进器) 1 x Satellite compass 卫星罗经 (部分国家可替代磁罗经) 1 x wave RADAR 海浪/溢油雷达(环境保护船) 1 x current RADAR 海流雷达(海洋监测船)Specializing in ship electronic science and technology一、种类 种类 二 原理和配备要求 二、原理和配备要求 三 厂家及大致价格 三、厂家及大致价格Specializing in ship electronic science and technology一、种类 种类二、原理及配备要求 原 备 求三、厂家及大致价格Specializing in ship electronic science and technology • • • 9方向和方向控制 位置 水深 水速 速 风速/风向 气象 夜晚避碰 船舶避碰 资料 记录 监控 人体工学Specializing in ship electronic science and technology船舶吨位划分1.(国际) 150以下—150吨 (雷达反射器)及SOLAS 第V章第19条第2 款1段: 操舵磁罗经 方位分罗经 GPS 等 操舵磁罗经,方位分罗经,GPS,等 2. 所有客船(国际) ,150吨(国际)—300吨 SOLAS 第V章第19条第2 款2段: 备用磁罗经,白昼信号灯 3. 所有客船(国际) ,300吨—500吨 SOLAS 第V章第19条第2 款3段: 回声测深仪/X波段雷达/雷达标绘/计程仪/航向传送装置Specializing in ship electronic science and technology船舶吨位划分4.所有客船(国际) ,300吨(国际) —500吨(国际), 500吨以上 SOLAS 第V章第19条第2 款4段: AIS 5 500吨 5. 500吨—3000吨 3000吨 SOLAS 第V章第19条第2 款5段:电罗经/ARPA 4. 3000吨—10000吨 SOLAS 第V章第19条第2 第 章第 条第 款7段:S波段雷达/ARPA 款 段 波段雷达/ 5. 10000吨—50000吨 SOLAS 第V章第19条第2 款8段:自动舵/连计程仪的20个物标ARPA 6. 50000吨— SOLAS 第V章第19条第2 款9段:回转速率计算仪器/绝对计程仪Specializing in ship electronic science and technology休息 会 休息一会!Specializing in ship electronic science and technology电罗经概述电罗经概述 -发展历史¾人类早期航海采用磁罗盘(指南针) ¾19世纪后期,钢质轮船逐渐取代木质 轮船,磁罗盘无法再保证精度 ¾在极地附近磁罗盘也会失灵 ¾寻找能够替代磁罗盘的方位指使仪 ¾如果借助陀螺仪,需要解决实时、 如果借助陀螺仪 需要解决实时 自主寻北的问题 ¾1908年,德国人安休茨(Anschutz) 研制成陀螺罗经 ¾1909年,美国人斯佩里(Sperry)也独立 研制成陀螺罗经 ¾1920s后 陀螺仪开始应用在航空, —— 陀螺仪实用技术形成和发展的开端用来测量飞机的姿态角 ¾飞行器的姿态角:航向、俯仰、横滚 ¾后来又开始应用于导弹的制导系统Specializing in ship electronic science and technology电罗经概述Specializing in ship electronic science and technology电罗经概述Specializing in ship electronic science and technology电罗经概述电罗经概述 -配套产品¾分罗经: 操舵分罗经, 方位分罗经, 两翼分罗经, 两翼分罗经 舵机房分罗经, 海图室分 经 海图室分罗经, ¾Course C recorder d 航向记录仪Specializing in ship electronic science and technology电罗经概述电罗经概述 -未来发展(高精度方向)陀螺仪发展的两个方向: 1、高精度 2、低成本、小型化 低成本 小型化 三浮陀螺 (液浮、气浮、磁悬浮) 最高精度10e-7度/小时 静电陀螺:转子无接触悬浮 1952 提出方案 1970s 末进入实用7度/小时 最高精度 10e-7国内研制状况 缺点 结构复杂 成本高昂 缺点:结构复杂,成本高昂Specializing in ship electronic science and technology电罗经概述电罗经概述 -未来发展(低成本与小型化方面)激光陀螺 60年代初开始研制,70年代进 入实用1983-1994美国各类陀螺比例振动陀螺 微机械陀螺 振动陀螺、微机械陀螺 光纤陀螺 70年代开始研制,80年代初进 入实用 音叉振动陀螺、压电振动陀螺、 半球谐振陀螺Specializing in ship electronic science and technology磁罗经概述``磁罗经是由我国古代四 大发明之 大发明之——指南针演 指南针演 变发展而来的。
海图是标绘有可航水域的水深、岛域、航标和沿岸地形地物等供航海使用的地图。
海图是按一定比例尺和投影方法绘制,是必不可少的航海工具。
图上资料要求详细、准确,并根据等有关资料随时进行改正和补充,使它与实际情况经常保持一致。
为开发海洋需要而编制的地图也叫海图。
船上说的海图通常是指第一种说的航海图。
中国是最早绘制和使用海图的国家之一。
据考证,公元前5~前3世纪战国时代的《山海经》中的配图,图中有一部分可能带有原始海图的性质。
近代以后发展缓慢欧洲最早为航海人员绘制的海图,可能出于公元1世纪、出生黎巴嫩的希腊人马里纳斯之手。
图上经线和纬线均为等间距,以当时的航运中心“罗得岛”为基准。
出生于埃及的希腊人托勒密是那个时代伟大的制图学家。
公元2世纪他首创把一块地球曲面投影于平面的制图法,定下了上北下南的制图常规,沿用至今。
他的学说成为后世制图工作的准绳。
欧洲中世纪最好的海图是13世纪的波托兰海图。
早期的波托兰海图标绘的内容主要是地中海及其邻近海区,以后逐步扩大。
这种海图绘在羊皮上,相当准确,图上有许多风向花,方向线延伸于全图,便于读取航向;无经纬度和水深;一般为小比例尺。
地理学家G.墨卡托1569年发表了按等角正圆柱投影原理制作的世界图(共18幅),他被尊为现代海图之父。
现代海图的95%属于墨卡托投影图。
许多航运发达国家都出版海图。
国际海道测量组织出版有国际海图,各会员国可修改复印。
中国于1921年成立海道测量局,开始测绘、出版现代海图,所出海图多属港湾图和江河图。
中华人民共和国成立后,1958年开始进行全国海区的基本测绘工作,陆续出版各种海图,并从中国海区向远海海区发展。
海图分类航用海图通常所说的海图,供船舶进行航迹推算、船位测绘和航线设计等。
各国航用海图分类大同小异,中国分为三种:①海区总图。
主要供各级机关和船舶研究海区形势,拟订航行计划等使用。
比例尺一般为1:300万或更小。
②航行图。
主要供船舶航行作业使用。
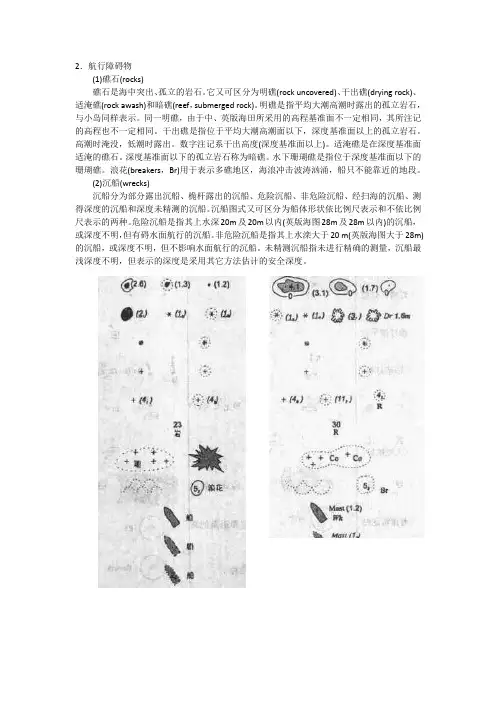
2.航行障碍物(1)礁石(rocks)礁石是海中突出、孤立的岩石。
它又可区分为明礁(rock uncovered)、干出礁(drying rock)、适淹礁(rock awash)和暗礁(reef,submerged rock)。
明礁是指平均大潮高潮时露出的孤立岩石,与小岛同样表示。
同一明礁,由于中、英版海田所采用的高程基准面不一定相同,其所注记的高程也不一定相同。
干出礁是指位于平均大潮高潮面以下,深度基准面以上的孤立岩石。
高潮时淹没,低潮时露出。
数字注记系干出高度(深度基准面以上)。
适淹礁是在深度基准面适淹的礁石。
深度基准面以下的孤立岩石称为暗礁。
水下珊瑚礁是指位于深度基准面以下的珊瑚礁。
浪花(breakers,Br)用于表示多礁地区,海浪冲击波涛汹涌,船只不能靠近的地段。
(2)沉船(wrecks)沉船分为部分露出沉船、桅杆露出的沉船、危险沉船、非危险沉船、经扫海的沉船、测得深度的沉船和深度未精测的沉船。
沉船图式又可区分为船体形状依比例尺表示和不依比例尺表示的两种。
危险沉船是指其上水深20m及20m以内(英版海图28m及28m以内)的沉船,或深度不明,但有碍水面航行的沉船。
非危险沉船是指其上水滦大于20 m(英版海图大于28m)的沉船,或深度不明,但不影响水面航行的沉船。
未精测沉船指未进行精确的测量,沉船最浅深度不明,但表示的深度是采用其它方法估计的安全深度。
(3)其它障碍物(other obstructions)除礁石与沉船外,其它障碍物,如捕鱼设备、水下桩(柱)、渔礁等一般以符号表示;有时也用文字注记说明,如“附近多渔栅”。
常见的礁石、沉船和其它障碍物的海图图式和含义见表1-2-4。
扫海测量简称扫测,是在一定海区内进行面的扫测,以查明该区域内或该区域所规定的深度上是否存在航行障碍物的一种测量。
用软式扫海具进行扫测的方法分定测和拖底扫测两种。
定测扫测是使扫海具的底索在深度基准面以下保持一定深度的扫海测量,主要用于确定船舶安全航行的深度和确定航行障碍物的最浅深度。
海图作业有关知识一距离单位1. 海里1 海里,也就是椭圆子午线上一分纬度弧长,它是随着纬度的不同而略有差异。
它在赤道上最短(1842.9 米),在两极最长(1861.6 米),而在纬度45o 则为1852.2米。
航海上通常把1海里定为1852米,海图上1 分纬度就是1 海里。
在海图上量距离时应尽可能在测量点纬度附近量取。
2. 链1 链等于十分之一海里,也就是185 米。
二方位航海上常用表示方位的两种方法1. 圆周法以正北为方位基准OOOo,按顺时针方向计量到测量点,用三位数表示,女口正北为0000(360o),正东为090o。
如距某点方位,就是以某点为基准(000°),按顺时针方向计量到测量点的方位。
2. 罗经点法罗经点法以北、东、南、西四个基本方向为基点,将平分相邻基点之间的平面方向称为隅点,即东北(NE)、东南(SE)、西南(SW)、西北(NW)四个方向;将平分相邻基点与隅点之间的平面方向称为三字点,其名称由基点名称以后加上隅点名称组成,即北北东(NNE)、东北东(ENE)、东南东(ESE)、南南东(SSE)等八个方向;再将平分相邻基点或隅点与三字点之间的16个平面方向称为偏点,偏点名称由基点名称或隅点名称之后加上偏向的方向来组成,例如;北偏东(N/E)、东北偏北(NE/N)、东偏北(E/N)等。
这样,四个基点、四个隅点、八个三字点和16 个偏点,共计32个方向点,叫做32 个罗经点,每点11o.25。
三度、分、秒的换算1o=60‘T =60〃例:10o25‘ 30〃=10o25‘ .519 o15‘ .790=19o15‘ 47〃.4注意:GPS显示的数据分后小数点后面的数字不是秒,而是点几分,如GPS船位:19o15' .790N 110 o25‘ .420E应读作北纬十九度十五点七九零分、东经一百一十度二十五点四二零分,或换算为GPS船位:19015’ 47〃.4N110025’ 25〃.2 E四作图工具的使用(示范)1 航海平行尺1.1 作用:在进行海图作业时,用于绘画方位线或航向线、量取方位线度数或航向线度数。
海图基础知识海图是航海必备的重要工具,它是一张地图,用于在海洋中导航和进行海上活动。
每个船员都应该掌握一些基本的海图知识,这样才能安全地穿越海域。
在本文中,我们将讨论一些海图的基础知识。
海图的类型海图分为许多类型,每种类型都有不同的目的和使用情况。
一些常见的海图类型包括:1. 海面图:显示水面的深度和水平面的形状,用于进行航行规划和水深管制。
2. 地形图:显示海底地形和地理特征,包括潜在的障碍物或海洋危险等,用于制定安全航线。
3. 气象图:显示气象数据,包括风、降雨、海浪和气温趋势。
这些信息可用于计算与风向相对的路程和估算船舶航行速度。
4. 航行图:包括所有的导航和船舶设备。
这些设备包括雷达、声纳、GPS和其他定位技术等船舶数据。
5. 特殊目的图:根据特定的海上行动事件或任务,制定不同的海图,比如钓鱼或水下探险等。
海图的基本组成部分海图包含大量的事实和数据,每个部分都非常重要。
以下是海图的基本组成部分:1. 缩放比例:缩放比例表示海图与实际海洋的比例关系。
例如,缩放比例1:100000表示海图一单位长度相当于实际海洋的100000单位长度。
2. 北向指针:显示海图上的北方方向。
3. 深度曲线:显示水面的深度,以及不同深度区域和沙洲的轮廓。
4. 航道标志:这些标志显示船舶应遵循的航线。
5. 海浪的符号:表示水面的各种波浪和海浪的形状和大小。
6. 海底地形符号:显示海洋底部的各种地形特征。
海图的用法为了正确使用海图,船员需要了解海图上的符号和标记,这些标记表示许多不同的信息。
以下是一些船员使用海图时需要注意的事项:1. 标记的位置:船员必须了解符号和标记的位置,并将它们与实际位置相匹配。
2. 深度:深度符号显示海洋的深度,船员需要确保船只在安全深度行驶。
3. 障碍物:要检查海图上的障碍物标记和线路标记,船员需要避开这些障碍物。
4. 船只位置:使用GPS或雷达等定位设备,可以用实时位置信息与海图上的航线进行比较,确保贯标正确。
《海图学》复习要点
第一章海图基础知识
1、海图和海图学的定义。
2、海图的基本特性,需要解决的基本矛盾。
3、海图的基本类型。
第二章海图发展简史
1、裴秀、贾耽在中国地图发展历史中贡献。
第三章地图学及其学科体系
1、空间认知、认知制图、心像海图的概念。
2、海图空间认知的主要感官通道和手段。
第四章海图数学基础
1、墨卡托投影的性质。
2、我国深度基准面的采用情况。
3、影响海图分幅的因素。
4、海图比例尺、海图定向的概念。
第五章海图符号系统
1、海图符号量表法。
2、海图符号视觉感受效果与视觉变量的关系。
3、海图符号设计的三要素。
4、海图注记的配置原则。
5、现代语言学理论对地(海)图符号语言的影响。
第六章海图内容要素的表示方法
1、《GB12319-1998中国海图图式》的主要内容。
2、航行障碍物的分类与表示方法。
第七章海图制图综合
1、海图制图综合的基本方法。
2、选取方法的资格指标法的分类与应用。
3、海岸分类与形状化简的原则。
4、干出滩综合的基本方法。
5、等深线的综合原则与基本方法。
第八章 IHO国际标准海图设计
1、海图生产的基本流程。
2、IHO主要的国际海图标准与规范。