课程设计(论文)-转速开环恒压频比控制的交流异步电动机调速系统
- 格式:doc
- 大小:730.00 KB
- 文档页数:17

电力拖动自动控制系统电力拖动自动控制系统简介电力拖动自动控制系统包括:直流调速系统和交流调速系统。
直流调速系统包括:直流调速方法、直流调速电源和直流调速控制。
交流调速系统包括:交流调速系统的主要类型、交流变压调速系统、交流变频调速系统、绕线转子异步电机双馈调速系统——转差功率馈送型调速系统和同步电动机变压变频调速系统。
电力拖动自动控制系统课程内容介绍第一篇直流调速系统闭环反馈直流调速系统1.1 直流调速系统用的可控直流电源根据前面分析,调压调速是直流调速系统的主要方法,而调节电枢电压需要有专门向电动机供电的可控直流电源。
常用的可控直流电源有以下三种:旋转变流机组——用交流电动机和直流发电机组成机组,以获得可调的直流电压。
静止式可控整流器——用静止式的可控整流器,以获得可调的直流电压。
直流斩波器或脉宽调制变换器——用恒定直流电源或不控整流电源供电,利用电力电子开关器件斩波或进行脉宽调制,以产生可变的平均电压。
1.2 晶闸管-电动机系统(V-M系统)的主要问题本节讨论V-M系统的几个主要问题:(1)触发脉冲相位控制;(2)电流脉动及其波形的连续与断续;(3)抑制电流脉动的措施;(4)晶闸管-电动机系统的机械特性;(5)晶闸管触发和整流装置的放大系数和传递函数。
1.3 直流脉宽调速系统的主要问题自从全控型电力电子器件问世以后,就出现了采用脉冲宽度调制(PWM)的高频开关控制方式形成的脉宽调制变换器-直流电动机调速系统,简称直流脉宽调速系统,即直流PWM 调速系统。
(1)PWM变换器的工作状态和波形;(2)直流PWM调速系统的机械特性;(3)PWM 控制与变换器的数学模型;(4)电能回馈与泵升电压的限制。
1.4反馈控制闭环直流调速系统的稳态分析和设计本节提要:转速控制的要求和调速指标;开环调速系统及其存在的问题;闭环调速系统的组成及其静特性;开环系统特性和闭环系统特性的关系;反馈控制规律;限流保护——电流截止负反馈1.5 反馈控制闭环直流调速系统的动态分析和设计反馈控制闭环直流调速系统的动态数学模型;反馈控制闭环直流调速系统的稳定条件; 动态校正——PI调节器的设计;系统设计举例与参数计算转速、电流双闭环直流调速系统和调节器的工程设计方法内容提要:转速、电流双闭环控制的直流调速系统是应用最广性能很好的直流调速系统。
转速开环恒压频比控制的交流异步电动机调速系统仿真转速开环恒压频比控制的交流异步电动机调速系统仿真转速开环恒压频比控制是交流电动机变频调速最基本的控制方式,一般变频调速装置都带有这项功能,恒压频比的转速开环工作方式能满足大多数场合交流电动机调速控制的要求,并且使用方便,是通用变频器的基本模式。
采用恒压频比控制,在基频以下的调速过程中可以保持电动机气隙磁通基本恒定,在恒定负载情况下(恒转矩),电动机在变频调速过程中的转差率基本不变,所以电动机的机械特性较硬,电动机有较好的调速性能。
但是如果频率较低,定子阻抗压降所占比重较大,电动机就难于保持气隙磁通不变,电动机的最大转矩将随频率的下降而减小。
为了使电动机在低频低速时仍有较大的转矩,在低频时应适当提高定子电压(低频电压补偿),使电动机在低频时仍有较大的转矩。
恒压频比变频调速系统的基本原理结构如图1所示,系统由升降速时间设定、fU曲线、SPWM调制和驱动等环节组成。
其中升降速时间设定用来限制电动机的升频速度,避免转速上升过快而造成电流和转矩的冲击,相当于软起动控制的作用。
fU曲线用于根据频率确定相应的电压,以保持压频比不变(fU=常数),并在低频时进行适当的电压补偿。
SPWM和驱动环节将根据频率和电压要求产生按正弦脉宽调制的驱动信号,控制逆变器,以实现电动机的变压变频调速。
图1 恒压频比变频调速系统原理图转速开环变频调速系统的仿真模型如图2所示。
图中逆变器、电动机、SPWM生成等主要模块提取路径见表1。
图2 转速开环VVVF系统仿真模型其中给定积分器的模型同图3,设定恰当的积分时间常数可以控制频率上升的速率,从而设定电动机的起动时间。
在给定积分器的后面插人了一个取整环节(integer),使频率为整数。
图3定积分器的模型fU曲线(见图4)由函数发生器Fcn产生,根据频率确定相应的电压值,其函数表达式为式为表1转速开环变频调速系统模型模块提取路径0U f f U U NN +=图4 f U 曲线式中,N U 为电动机额定电压,N f 为电动机额定频率,0U 为初始电压补偿值。
《交流调速系统》课后习题答案第 5 章 闭环控制的异步电动机变压调速系统5-1 异步电动机从定子传入转子的电磁功率m P 中,有一部分是与转差成正比的转差功率s P ,根据对s P 处理方式的不同,可把交流调速系统分成哪几类?并举例说明。
答:从能量转换的角度上看,转差功率是否增大,是消耗掉还是得到回收,是评价调速系统 效率高低的标志。
从这点出发,可以把异步电机的调速系统分成三类 。
1)转差功率消耗型调速系统:这种类型的全部转差功率都转换成热能消耗在转子回路中,降电压调速、转差离合器调速、转子串电阻调速都属于这一类。
在三类异步电机调速系统中,这类系统的效率最低,而且越到低速时效率越低,它是以增加转差功率的消耗来换取转速的降低的(恒转矩负载时)。
可是这类系统结构简单,设备成本最低,所以还有一定的应用价值。
2)转差功率馈送型调速系统:在这类系统中,除转子铜损外,大部分转差功率在转子侧通 过变流装置馈出或馈入,转速越低,能馈送的功率越多,绕线电机串级调速或双馈电机调速属于这一类。
无论是馈出还是馈入的转差功率,扣除变流装置本身的损耗后,最终都转化成 有用的功率,因此这类系统的效率较高,但要增加一些设备。
3)转差功率不变型调速系统:在这类系统中,转差功率只有转子铜损,而且无论转速高低,转差功率基本不变,因此效率更高,变极对数调速、变压变频调速属于此类。
其中变极对数 调速是有级的,应用场合有限。
只有变压变频调速应用最广,可以构成高动态性能的交流调速系统,取代直流调速;但在定子电路中须配备与电动机容量相当的变压变频器,相比之下,设备成本最高。
5-2 有一台三相四极异步电动机,其额定容量为5.5kW ,频率为50Hz ,在某一情况下运行,自定子方面输入的功率为6.32kW ,定子铜损耗为341W ,转子铜损耗为237.5W ,铁心损耗为167.5W ,机械损耗为45W ,附加损耗为29W ,试绘出该电动机的功率流程图,注明各项功率或损耗的值,并计算在这一运行情况下该电动机的效率、转差率和转速。
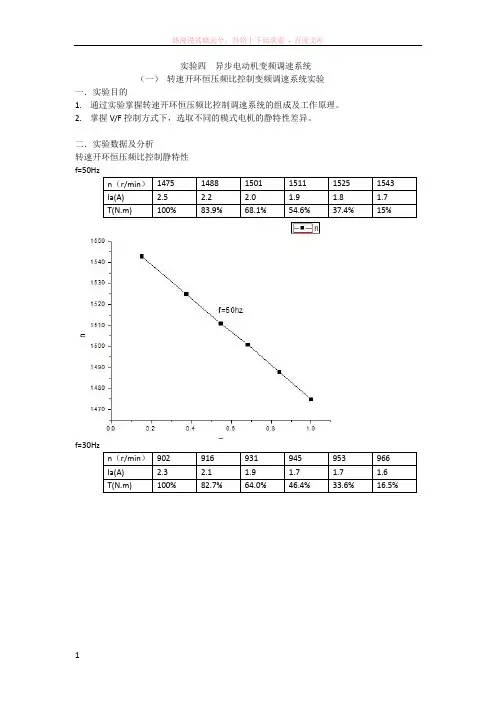
实验四异步电动机变频调速系统(一)转速开环恒压频比控制变频调速系统实验一.实验目的1.通过实验掌握转速开环恒压频比控制调速系统的组成及工作原理。
2.掌握V/F控制方式下,选取不同的模式电机的静特性差异。
二.实验数据及分析转速开环恒压频比控制静特性n(r/min)1475 1488 1501 1511 1525 1543Ia(A) 2.5 2.2 2.0 1.9 1.8 1.7T(N.m) 100% 83.9% 68.1% 54.6% 37.4% 15%n(r/min)902 916 931 945 953 966Ia(A) 2.3 2.1 1.9 1.7 1.7 1.6T(N.m) 100% 82.7% 64.0% 46.4% 33.6% 16.5%n(r/min)475 488 495 508 518 528 Ia(A) 1.9 1.7 1.6 1.6 1.5 1.5T(N.m) 85% 69.2% 56.1% 45.1% 28.0% 21.7%n(r/min)472 485 495 506 508 525 Ia(A) 2.0 1.8 1.7 1.7 1.6 1.6T(N.m) 62.5% 50.5% 39.2% 27.4% 20.8% 3.6%三.思考题1.说明转速开环恒压频比控制静特性特点答:其他条件相同,转速与频率大致成正比;频率一样时,转速越高,带动转矩能力越差。
2.说明低频补偿对系统静特性的影响。
答:由于临界转矩随f减小而减小,f较低时,电动机负载能力较弱。
低频补偿可以增强系统负载能力,同转速时有低频补偿情况T较小。
3.说明载波频率的大小对电机运行影响答:低频时转矩大,噪音小,但此时主元器件开关损耗大,整机发热较多,效率下降。
高频时转矩变小,电流输出波形比较理想。
(二)异步电动机带速度传感器矢量控制系统实验一.实验目的1.通过实验掌握异步电动机带速度传感器矢量控制系统的组成及工作原理;2.掌握异步电动机带速度传感器矢量控制系统静、动特性。
三相异步电机交流变频调速系统设计实验指导书仇国庆编写重庆邮电大学自动化学院测控技术实验中心2010/11/2三相异步电机交流变频调速系统设计实验指导书一、实验目的:1. 了解三相异步电机调速的方法;2. 熟悉交流变频器的使用;3. 掌握三相异步电机交流变频调速系统设计。
4. 交流异步电动机机械特性及变频调速特性测试二、控制系统设计要求系统设计要求能够实现三相异步电动机的如下状态的控制:正转;反转;停止;点动;加速;减速。
图1 控制系统硬件结构图三、基本知识:1.异步电动机调速系统种类很多,常见的有:(1)降电压调速;(2)电磁转差离合器调速(3)绕线转子异步电机转子串电阻调速(4)绕线转子异步电机串级调速(5)变极对数调速(6)变频调速等等。
2.三相交流异步电动机2.1 异步电动机旋转原理异步电动机的电磁转矩是由定子主磁通和转子电流相互作用产生的。
n转速顺时针旋转,转子绕组切割磁力线,产生转子电流⑴磁场以⑵通电的转子绕组相对磁场运动,产生电磁力⑶ 电磁力使转子绕组以转速n 旋转,方向与磁场旋转方向相同2.2 旋转磁场的产生旋转磁场实际上是三个交变磁场合成的结果。
这三个交变磁场应满足:⑴ 空间位置上互差rad 3/2π电度角。
由定子三相绕组的布置来保证⑵ 在时间上互差rad 3/2π相位角(或1/3周期)。
由通入的三相交变电流来保证。
2.3 电动机转速产生转子电流的必要条件:是转子绕组切割定子磁场的磁力线。
因此,转子的转速n 必须低于定子磁场的转速0n 。
两者之差称为转差:n n n -=∆0转差与定子磁场转速(常称为同步转速)之比,称为转差率:0/n n s ∆=同步转速0n 由下式决定:p f n /600=上式中,f 为输入电流的频率,p 为旋转磁场的极对数。
由此可得转子的转速:p s f n /)1(60-=3.异步电动机调速由转速p s f n /)1(60-=可知异步电动机调速有以下几方法:(1) 改变磁极对数p (变极调速)定子磁场的极对数取决于定子绕组的结构。
摘要本文首先在对该系统的整体结构、控制方案和各部分功能实现的方法进行了详细分析,并设计出该系统的硬件电路。
其中硬件电路包括主电路和控制电路,在控制电路中以ARM(LPC2148)控制器为核心,通过键盘的给定频率并由LPC2148控制智能模块SA4828产生可调频率的SPWM方波,并通过SPWM控制技术对交流电机实现恒压频比控制,并用数码管对当前频率进行实时显示。
主电路包括整流、滤波和逆变电路。
为了三相交流异步电动机的可靠性,还设计了软启动电路、过欠压、过热、过流保护电路。
使设计的可靠性得到了提高。
在软件设计中,采用通用的模块化设计方式,编写了三相交流异步电动机调速程序,并且使用C语言进行程序,在 ADS(ARM Developer Suite)开发环境下编译、、运行通过。
论文的创新点在于将ARM嵌入式微处理器作为控制核心结构简单、可靠易行。
相对于传统交流调速,该系统采用全数字式控制方式,极提高了系统的实时性能。
关键词:ARM 变频调速智能功率模块恒压频比控制 SPWMAbstractIn this paper,first The whole structure and control scheme of the system, realization methods for all Parts have been analyzed in detail, then, the feasibility of design is demonstrated, and hardware circuit is designed. The system hardware circuit is composed of the power circuit and control circuit ,the control circuit uses LPC2148 as its core,the frequency is given with keyset , the LPC2148 control intelligent module SA4824 ,and can generate a variable SPWM wave, this system use SPWM Technology to realize constant U/f Control of AC motor, and displays frequency at present with LEDThe Power circuit includes rectification,filtering and inverter. In order to improve reliability of three Phase AC asynchronous motor, the paper also designed soft start circuit and other protect circuits such as the undervoltage and overvoltage, the too overheated and the output flow. So that the reliability of the design has been enhanced.Software is designed the process ,the speed-adjusted program of three Phase AC asynchronous motor control system has been Written with C language,compiled, linked and run in ADS(ARM Developer Suite) environment successfully .The innovation of this paper consists in its simplicity and reliability using ARM embedded microprocessor as the kernel .Relative to traditional Variable speed ,this system adopts digital control, and promotes the performance and anti-jammingKeywords ARM, variable frequency variable speed,U/f control method,SPWM目录摘要 (I)Abstract (II)第1章绪论 (1)1.1电机调速发展现况和趋势 (1)1.2电力电子技术的发展现况和趋势 (2)1.3国外交流调速现状 (3)1.3.1国外现状 (3)1.3.2国现状 (3)1.4本论文的研究容 (4)第2章主电路设计 (6)2.1 主电路原理图 (6)2.2 输入整流滤波电路的设计 (7)2.2.1 EMI滤波电路 (7)2.2.2 输入整流电路 (7)2.2.3 输入滤波电容容量的计算 (8)2.2.4电源指示灯 (10)2.3逆变电路的设计 (10)2.3.1 主功率管IGBT的容量计算 (10)2.3.2续流电路 (11)2.3.3吸收电路 (11)2.3.4制动电阻 (12)第3章控制电路设计 (14)3.1控制原理图 (14)3.2 ARM的最小系统设计 (15)3.2.1微控制器LPC2148 (15)3.2.2时钟和复位系统 (15)3.3显示电路 (18)3.3.1数码管控制芯片 MAX1279 (19)3.4三相SPWM控制器SA4828 (20)3.4.1 寄存器软件设计 (20)3.5按键、指示灯和报警 (23)3.5.1按键 (23)3.5.2指示灯 (23)第4章 IGBT驱动电路设计 (25)4.1驱动电路原理图 (25)4.1.1驱动电路M57962L (25)第5章保护电路设计 (27)5.1 保护电路概述 (27)5.2 输入过欠压保护电路的设计 (27)5.3限流启动电路 (29)5.3.1采样电路 (29)5.3.2限流电路中晶闸管的驱动电路 (30)5.4过电流保护电路 (30)5.5IGBT的过热保护设计 (31)第6章辅助电源设计 (33)第7章变频调速系统的软件设计 (34)结论 (37)致 (38)参考文献 (39)附录1 (41)附录2 (45)附录3 (51)第1章绪论1.1电机调速发展现况和趋势电机调速是电力电子技术应用的最大领域之一,具有极大的吸引力,同时也具有较强的挑战性。
异步电动机变频调速系统异步电动机变频调速系统是属于转差功率不变型调速系统,是异步电动机各种调速方法中调速性能最好、效率最高的一种调速方法,因而在实际生产中得到广泛应用。
变频调速的基本工作原理异步电动机的转速表达式为 )1(n 60p1s f n -==0n )1(s - 在三相异步电动机中存在下列关系:m N q k N f E φ11144.4=如忽略定子阻抗压降,则1U ≈ m N q k N f E φ11144.4=式中 1U -----定子相电压q E ——气隙磁通在定子每相绕组中感应电动势的有效值,V ;1f -----定子的电源频率1N ——定子每相绕组串联匝数;1N k ——基波绕组系数;m φ——每极气隙磁通量,Wb 。
变频调速的基本控制方式和机械特性变频调速的基本控制方式1. 基频以下调速控制方式要保持m φ不变,当频率1f 从额定值N f 1向下调节时,应同时降低q E ,使1f E q=常数,即采用恒定电动势频率比的控制方式。
1U ≈q E ,取11f U =常数,即采用恒压频比的控制方式。
在低频时,1U 和q E 都较小,定子阻抗压降所占的分量就比较显著,不能忽略,因而必须对1U 进行定子阻抗压降补偿,人为地把电压1U 提高一些,尽可能维持磁通m φ基本不变。
2. 基频以上调速控制方式在基频以上调速时,可以从N f 1往上增加,如要维持m φ恒定,必须随频率1f 的增加而相应增加1U ,但电压1U 一般不能超过电动机的额定电压N U 1,只能保持在电动机的额定电压N U 1上。
所以在基频以上调速时只能放弃维持磁通m φ恒值的要求,使磁通m φ与频率成反比地降低,相当于直流电动机的弱磁升速的情况。
在基频以下调速属于恒转矩调速,在基频以上调速属于恒功率调速。
变频调速的机械特性异步电动机恒压恒频时的机械特性当定子电压1U 和角频率1ω都为恒定值时,异步电动机的电磁转矩e T 为 2212122212121122211)()()(33l l p p m e L L s R sR R s U n s R I n P T ++'+'=''=Ω=ωωωω式中 m P ---电磁功率1ω---电源角频率1Ω--同步机械角速度p n --极对数1U --定子电压1R 、'2R --定子每相电阻和折合到定子侧的转子每相电阻1l L 、'2l L --定子每相漏感和折合到定子侧的转子每相漏感当s 很小时,可忽略上式分母中含s 项,转矩近似与s 成正比,这时机械特性)(s f T e =是一段直线,如图19-3所示。
交流异步电机转速开环恒压频比的交流调速系统频率和
稳态转速之间的关系
交流异步电机转速开环恒压频比的交流调速系统中,频率和稳态转速之间的关系可以通过以下方式理解:
当电机以恒定的压频比(电压/频率)运行时,其转速会随着电源频率的改
变而变化。
这是因为异步电机的转速主要取决于电源频率和电机本身的参数。
在恒压频比的情况下,电源电压保持恒定,因此电机的转速直接与电源频率成正比。
也就是说,当电源频率升高时,电机的转速也会相应升高;反之,当电源频率降低时,电机的转速也会降低。
但请注意,这种关系仅在稳态情况下成立,即在电机达到新的平衡状态后。
在动态过程中,电机还需要经历一段时间的过渡状态,这时的转速和电源频率之间的关系可能并不那么直接。
此信息仅供参考,如需更准确全面的解释,建议咨询相关专家或查阅相关文献资料。
运动控制系统课程设计信息科学与工程学院2018年6月《运动控制系统》课程设计报告感应电动机恒压频比控制设计与仿真姓名:班级:学院:学号:指导老师:目录1. 前言 (4)1.1 背景介绍 (4)1.2 开发背景的选用及介绍 (4)2.基本原理 (4)2.1 异步电动机的恒压恒频调速原理分析 (4)2.2 机械特性 (5)2.3 系统原理图 (6)2.4 恒压频比变频调速系统的仿真模型 (7)2.5 主电路参数的计算 (7)2.6 部分参数的设置图 (7)2.7 控制器设计 (9)3.仿真结果 (9)4.心得体会 (12)5.参考文献 (13)1.前言本课程设计报告是基于中南大学电气工程及其自动化专业运动控制系统课程设计《感应电动机恒压频比控制设计与仿真》所写。
报告内容贴合课程设计内容,满足题意,充分展示了课程设计的结果。
本报告内容涵盖设计背景,开发背景,调速原理分析,系统原理图,仿真模型介绍,参数设置,控制器设置和仿真结果1.1 背景介绍恒压频比控制是交流电动机变频调速最基本的控制方式,一般变频调速装置都带有这项功能,恒压频比的工作方式能满足大多数场合交流异步电动机调速控制的要求,并且使用更方便,是通用变频器的基本方式。
采用恒压频比控制,在基频以下的调速过程中可以保持电动机气隙磁通基本不变,在恒定负载情况下(恒转矩),电动机在变频调速过程中的转差率基本不变,所以电动机的机械特性较硬,电动机有较好的调速性能。
1.2 开发背景的选用及介绍MATLAB是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。
交流调速——建模与仿真标题问题:转速开环恒压频比控制的交流异步电动机调速系统仿真专业:班级:学号:姓名:指导教师:目录一、MATLAB简介 (1)二、异步电动机的恒压频比调速原理分析 (2)2.1变压变频调速的基本原理 (2)2.1.1基频以下调速 (2)2.1.2基频以上调速 (3)2.2恒压频比时的电动机的机械特性 (3)2.2.1 基频以下 (3)2.2.2 基频以上 (4)三、逆变器输出电压和波形的SPWM控制 (5)四、恒压频比变频调速系统原理图 (6)五、simulink仿真 (7)5.1变压变频调速系统的仿真图 (7)5.2仿真图模型模块提取路径 (8)六、仿真波形与分析 (8)6.1给定频率为50Hz (8)6.2给定频率为30Hz (12)6.2给定频率为60Hz (16)七、心得体会 (20)转速开环恒压频比控制的交流异步电动机调速系统仿真摘要转速开环恒压频比控制是交流电动机变频调速最基本的控制方式,一般变频调速装置都带有这项功能,恒压频比的转速开环工作方式能满足大大都场合交流异步电动机调速控制的要求,并且使用更便当,是通用变频器的基本方式。
采用恒压频比控制,在基频以下的调速过程中可以保持电动机气隙磁通基本不变,在恒定负载情况下(恒转矩),电动机在变频调速过程中的转差率基本不变,所以电动机的机械特性较硬,电动机有较好的调速性能。
但是如果频率较低,定子阻抗压降所占的比重较大,电动机就很难保持气隙磁通不变,电动机的最大转矩将随频率的下降而减小。
为了使电动机在低频低速时仍有较大的转矩,在低频时应适当提高定子电压(低频电压补偿)使电动机在低频时仍有较大的转矩。
异步电动机的变压变频调速系统一般简称为变频调速系统。
由于在调速时转差功率不随转速而变化,调速范围宽,无论高速还是低速时效率都较高,在采取必然的技术法子后能实现高动态性能,可与直流调速系统媲美。
因此现在它的应用面很广,目前交流异步电动机的调速系统已经广泛应用于数控机床、风机、泵类、传送带、给料系统、空调器等设备的电力源和动力源,并起到了节省电能,提高设备自动化,提高产品质量的良好效果.下文在详细分析交流异步电动机变频调速的原理基础上,应用MATLAB/SIMULINK仿真软件,实现了转速开环恒压频比控制的交流异步电动机调速系统的仿真,并且详细分析了仿真结果。
重庆文理学院电子电气工程学院
专业课程设计论文
题目转速开环恒压频比控制的交流异步电动机调速系统
专业电气工程与自动化
姓名
班级
学号
2011年月日
转速开环恒压频比控制的交流异步电动机调速系统
转速开环恒压频比控制的交流异步电动机调速系统
摘要:异步电动机的变压变频调速系统一般简称为变频调速系统。
由于在调速是转差功率不随转速而变化,调速范围宽,无论高速还是低速是效率都较高,在采取一定的技术措施后能实现高动态性能,可与直流调速系统媲美。
因此现在它的应用面很广,目前交流异步电动机的调速系统已经广泛应用于数控机床、风机、泵类、传送带、给料系统、空调器等设备的电力源和动力源,并起到了节省电能,提高设备自动化,提高产品质量的良好效果. 本文对交流系统进行建模仿真,可以更加熟悉交流调速系统的结构,掌握各种调速系统的优缺点,选择合理的方案,解决实际中的问题。
文章在详细分析交流异步电动机变频调速的原理基础上,应用MATLAB/SIMULINK仿真软件,实现了转速开环恒压频比控制的交流异步电动机调速系统的仿真,并且详细分析了仿真结果。
关键词:异步电动机;变频调速;MATLAB 仿真
2
2008级电气工程与自动化专业课程设计论文
3 1引言
异步电动机的变压变频调速系统一般简称为变频调速系统。
由于在调速是转差功率不随转速而变化,调速范围宽,无论高速还是低速是效率都较高,在采取一定的技术措施后能实现高动态性能,可与直流调速系统媲美。
因此现在它的应用面很广,目前交流异步电动机的调速系统已经广泛应用于数控机床、风机、泵类、传送带、给料系统、空调器等设备的电力源和动力源,并起到了节省电能,提高设备自动化,提高产品质量的良好效果. 本文对交流系统进行建模仿真,可以更加熟悉交流调速系统的结构,掌握各种调速系统的优缺点,选择合理的方案,解决实际中的问题。
在进行电动机调速时,常须考虑的一个重要因素,就是希望保持电动机中每极磁通量为额定值不变。
如果磁通太弱,没有充分利用电机的铁芯,是一种浪费;如果过分增大磁通,又会使铁心饱和,从而导致过大的励磁电流,严重时会因绕组过热而损坏电机。
对于直流电机,励磁系统是独立的,只要对电枢反应有恰当的补偿,保持不变是很容易做到的。
在交流异步电机中,磁通由定子和转子磁动势合成产生,要保持磁通恒定就要费一些周折。
2变频调速的原理
在异步电动机调速时,总希望保持主磁通
为额定值。
由异步电机定子每相电动势有效值可知,如果略去定子阻抗下降,有
(1)
由(1)式知,若定子端电压不变,随着升高,
将减小。
又由转矩公式知,在相同的情况下,减小会导致电动机输出转矩下降,
严重时会使电动机堵转。
因此,在变频调速过程中应该同时改变定子电压和频率,以保持主磁通不变。
而如何按比例改变电压和频率,要分基频以下和基频以上两种情况。
2.1基频以下调速 恒定压频比调速要求;当相对较高时,可忽略定子电阻那么最大实用转矩公式为;由于,为了保证变频调速时电动机过载能力不变,需要满足变频前后
,即。