M700驱动菲仕永磁同步电机参数调试
- 格式:pdf
- 大小:561.65 KB
- 文档页数:5

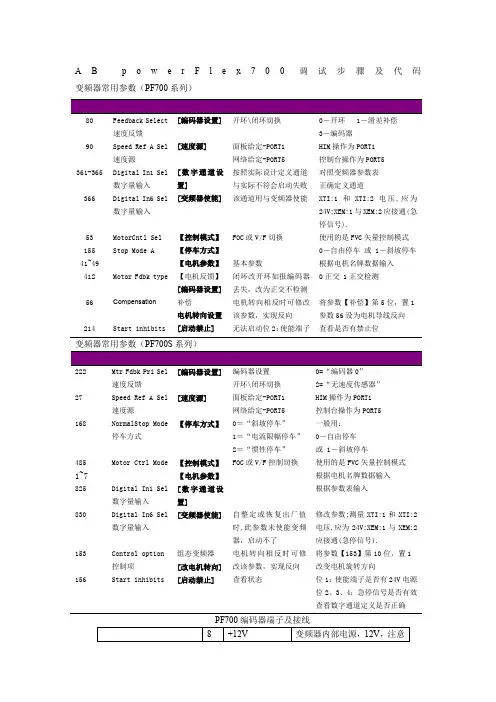
A B p o w e r F l e x 700调试步骤及代码变频器常用参数(PF700系列)变频器常用参数(PF700S 系列)222 Mtr Fdbk Pri Sel 速度反馈[编码器设置] 编码器设置 开环\闭环切换 0=“编码器0”2=“无速度传感器” 27 Speed Ref A Sel 速度源 [速度源] 面板给定-PORT1 网络给定-PORT5 HIM 操作为PORT1 控制台操作为PORT5 168NormalStop Mode 停车方式【停车方式】 0=“斜坡停车”1=“电流限幅停车” 2=“惯性停车”一般用: 0-自由停车 或 1-斜坡停车485 Motor Ctrl Mode 【控制模式】 FOC 或V/F 控制切换使用的是FVC 矢量控制模式 1~7【电机参数】根据电机名牌数据输入 825 Digital In1 Sel 数字量输入 [数字通道设置]根据参数表输入830Digital In6 Sel 数字量输入[变频器使能] 自整定或恢复出厂值时,此参数未使能变频器,启动不了修改参数;测量XTI:1和XTI:2电压,应为24V;XEM:1与XEM:2应接通(急停信号).153 Control option 控制项组态变频器 [改电机转向] 电机转向相反时可修改该参数,实现反向将参数【153】第10位,置1 改变电机旋转方向156Start inhibits[启动禁止]查看状态位1:使能端子是否有24V 电源 位2、3、4:急停信号是否有效查看数字通道定义是否正确80 Feedback Select 速度反馈[编码器设置] 开环\闭环切换 0-开环 1-滑差补偿3-编码器90Speed Ref A Sel 速度源[速度源] 面板给定-PORT1 网络给定-PORT5 HIM 操作为PORT1控制台操作为PORT5 361-365 Digital In1 Sel 数字量输入[数字通道设置]按照实际设计定义通道 与实际不符会启动失败对照变频器参数表 正确定义通道366Digital In6 Sel 数字量输入[变频器使能] 该通道用与变频器使能XTI:1和XTI:2电压,应为24V;XEM:1与XEM:2应接通(急停信号).53 MotorCntl Sel 【控制模式】 FOC 或V/F 切换 使用的是FVC 矢量控制模式 155 Stop Mode A【停车方式】 0-自由停车 或 1-斜坡停车 41~49【电机参数】 基本参数根据电机名牌数据输入 412 Motor Fdbk type 【电机反馈】 [编码器设置] 闭环改开环如报编码器丢失,改为正交不检测0正交 1正交检测56 Compensation补偿 电机转向设置 电机转向相反时可修改该参数,实现反向将参数【补偿】第5位,置1 参数56设为电机导线反向214Start inhibits[启动禁止]无法启动位2:使能端子 查看是否有禁止位1.主菜单—device select 设备选择—20-COMM-D网卡2.#3 DN Addr Cfg网卡地址(如变频器编号为D40,则网卡地址为40)3.#13、#25、#26都设置为001111.主菜单—按一下ALT—再按一下回车2.然后就有几十秒时间可以去拿掉HIM—主菜单—memory storage—HIM corycat—device to HIM/ HIM to device—yes(PF700系列)#197,出厂复位参数——1-恢复出厂(PF700/ PF700S系列)HIM主页面——memory storage——reset to defaits——确定速度源Speed Ref A Sel改为DPI1——拔掉网线——给定速度——按绿色启动按钮速度源Speed Ref A Sel改为DPI5——接上网线——操作台上启动1.参数#80反馈设备从3-Encoder改成0-Openloop;2.如果报编码器丢失故障,将#412电机反馈类型,改成0-正交不检测;3.做一遍快速静态自整定;4.如果原先是开环做的自整定,那么此时可以不用再做自整定;1.确认#214参数中的禁止位的来源;2.拔掉网线,复位网络故障,再确认指示灯是否绿色;3.检查DI输入通道的设置(#361-#366参数)是否正确;4.24V信号电源正常;XTI:1和XTI:2电压,应为24V5.急停信号是否有效,XEM:1与XEM:2应接通6.如是报减速禁止故障,应检查电机转向与编码器方向是否一致。
AX-V 全数字交流伺服驱动器用户手册宁波菲仕电机技术有限公司版本号:AXV-SPDV-1-0序言感谢您购买宁波菲仕电机技术有限公司的菲仕AX-V全数字交流伺服驱动器(以下简称驱动器)产品。
AX-V系列伺服驱动器是针对交流永磁伺服电机控制用的高品质、多功能、低噪音的伺服驱动器,可对伺服电机实现速度、力矩和位置高精度、高响应的控制。
AX-V系列伺服驱动器为您提供了丰富而又强大的功能:✧可以通过RS-485、CanOpen总线、ProfiBus总线与上位控制器通信,驱动器的所有参数和指令均可以通过上位控制器以通信的方式传送给驱动器。
✧通过Intradrive总线可以使驱动器与驱动器之间实现高速的通信,在需要多个驱动器联动的场合更具有优越性。
✧可以适配多种编码器,具体的有正余弦编码器、光电增量式编码器、旋转变压器、绝对值式编码器等,并都能使电机获得相当的控制性能。
✧AX-V系列驱动器具有可编程功能,允许用户对伺服驱动器进行程序开发,并且有8个数字量输入点、8个数字量输出点、3个模拟量输入口、4个模拟量输出口供用户编程使用,具有很大的灵活性。
而且,用户可以根据实际工作场合要求开发适合于自己使用的应用工程软件。
✧我公司为用户提供了速度、位置控制标准应用工程软件,可以满足大多数控制场合的使用要求。
在使用AX-V系列驱动器之前,请仔细阅读本手册,以保证正确使用。
错误的操作和使用可能造成驱动器运行不正常、发生故障或者降低使用寿命,并有可能造成驱动器损坏、人身伤害等事故。
因此使用前应反复阅读本手册,并严格按照操作说明使用。
本手册为驱动器的随机附件,务必请您使用后妥善保管,以备今后对驱动器进行检修和维护时使用。
第一章注意事项1.1 开箱检查......................................P3 1.2 驱动器的型号说明..............................P3 1.3 安全注意事项..................................P3 1.3.1 安装注意事项................................P4 1.3.2 接线注意事项................................P4 1.3.3 维护注意事项................................P5 1.3.4 使用注意事项................................P5 1.3.5 报废时注意事项..............................P51.1 开箱检查在开箱时,请认真确认下列各项:在运输途中是否有破损现象驱动器型号是否与您的订货要求相一致附件是否齐全,包装箱内装有如下器件:●驱动器一台●驱动器接线端子排三个●25芯编码器插头一个●用户手册一套如发现有不符合或者遗漏的情况,请立即与我公司联系!1.2驱动器的型号说明AX-V1.3安全注意事项危险:如果没有按照要求进行操作,可能会造成设备的严重损坏或者人员的伤害。
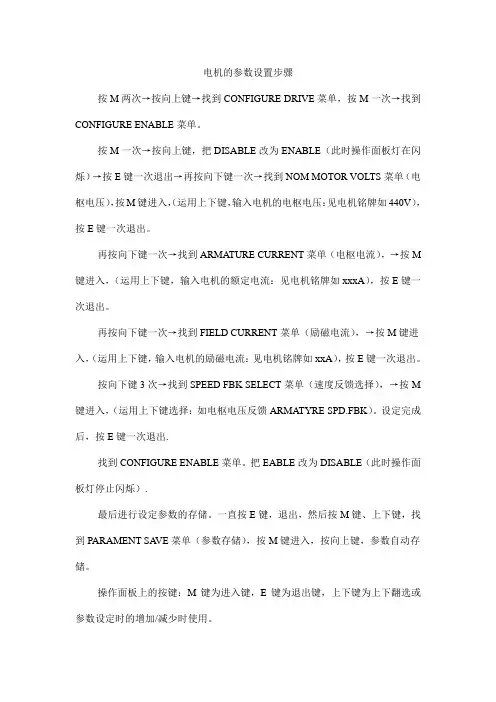
电机的参数设置步骤
按M两次→按向上键→找到CONFIGURE DRIVE菜单,按M一次→找到CONFIGURE ENABLE菜单。
按M一次→按向上键,把DISABLE改为ENABLE(此时操作面板灯在闪烁)→按E键一次退出→再按向下键一次→找到NOM MOTOR VOLTS菜单(电
(运用上下键,输入电机的电枢电压:见电机铭牌如440V),枢电压),按M键进入,
按E键一次退出。
再按向下键一次→找到ARMATURE CURRENT菜单(电枢电流),→按M 键进入,(运用上下键,输入电机的额定电流:见电机铭牌如xxxA),按E键一次退出。
再按向下键一次→找到FIELD CURRENT菜单(励磁电流),→按M键进入,(运用上下键,输入电机的励磁电流:见电机铭牌如xxA),按E键一次退出。
按向下键3次→找到SPEED FBK SELECT菜单(速度反馈选择),→按M 键进入,(运用上下键选择:如电枢电压反馈ARMATYRE SPD.FBK)。
设定完成后,按E键一次退出.
找到CONFIGURE ENABLE菜单。
把EABLE改为DISABLE(此时操作面板灯停止闪烁).
最后进行设定参数的存储。
一直按E键,退出,然后按M键、上下键,找到PARAMENT SA VE菜单(参数存储),按M键进入,按向上键,参数自动存储。
操作面板上的按键:M键为进入键,E键为退出键,上下键为上下翻选或参数设定时的增加/减少时使用。
参数有不同的菜单层,具体请参考590+说明书。
附设置驱动器简易菜单。
永磁同步电机驱动电梯调试方法(有称重配富士Lift变频器)永磁同步电机驱动的电梯和异步电机驱动的电梯调试方法差别不大,主要是变频器里的电机参数和几个功能控制选择不同。
建议安装队在挂钢丝绳前先测试电机能否正常转动。
在电机正常转动后再挂钢丝绳,这样就可避免因测定电机的磁极位置偏移而吊轿厢。
1. 通电前检查电源、电机和编码器的接线是否正确,接地是否可靠,控制柜输出端得“U、V、W”必须与电机端得“U、V、W”一一对应。
当所有呼梯板和轿顶板连接到呼梯通讯线中时,电源未接通时,测两通讯线间电阻应为60±2Ω,两通讯线对地(PE)不能有短路。
2. 通电后,走梯前,先检查变频器参数(电机额定参数,F42选1,L01,L02等)3. 控制柜出厂前都是经过试运行,合格才出厂的,因此,通电后能正常运转;若不能正常运转,就不得不对电机的磁极位置偏移进行测定。
4. 检查上下强迫减速开关、限位开关是否动作可靠,方向是否相符;脉冲方向、电梯方向和门区信号是否正确。
5. 进行井道自学习。
调好减速时间、减速距离。
6. 测定电梯平衡系数(40%~~50%)。
调好启动舒适感、平层。
(无称重的就调好轻、满、超载开关)7. 按接线图把称重装置接好,就可开始自学习称重装置。
8. 轿厢内加入平衡负载(使轿厢侧与对重侧差不多一样重),电梯开到平衡位置,变频器参数E61改成4,L54改成0,L60与L61均设为0%,E43改为19,使由LED对转矩偏置平衡调整(BTBB)进行监视,调整C31的值,使得LED显示数据为0% 。
9. 平衡调整后,使电梯处于空载状态,把E43改为20,便可通过LED对转矩偏置增益调整(BTBG)进行监视,检修运行,通过调整L60与L61,使LED显示数据变成或者尽量接近0% .注:L60与L61两个参数分别对应电梯运行的一个方向,如L60对应上方向,L61即为下方向,某一方向运行时,只有相应的那一个参数起作用。
宁波菲仕运动控制技术有限公司宁波菲仕电机技术有限公司永磁交流伺服电机Ultract III(第二版)使用说明书目录一、概述 (3)二、规范说明 (3)三、检查 (3)四、安装 (4)五、编码器配置 (4)六、接线 (6)七、PHASE电机与驱动器接线 (10)Ⅰ、匹配PHASE驱动器接线 (10)(1)、配置正余弦编码器接线 (10)(2)、配置绝对值编码器接线 (11)(3)、配置旋转变压器接线 (12)Ⅱ、匹配LENZE驱动器接线 (13)(1)、配置旋转变压器接线 (13)(2)、配置绝对值编码器接线 (14)(3)、配置数字增量式编码器接线 (15)Ⅲ、匹配KEB驱动器接线 (16)(1)、配置正余弦编码器接线 (16)(2)、配置旋转变压器接线 (17)(3)、配置绝对值编码器接线 (18)Ⅳ、匹配SIEMENS驱动器接线 (19)(1)、配置正余弦编码器接线 (19)(2)、配置旋转变压器接线 (20)Ⅴ、匹配Schneider驱动器接线 (21)(1)、配置旋转变压器接线 (21)(2/3)、配置绝对值编码器接线 (22)Ⅵ、匹配B&R驱动器接线 (24)(1)、配置绝对值编码器接线 (24)Ⅶ、匹配CT驱动器接线 (25)(1)、配置绝对值编码器接线 (25)Ⅷ、匹配Kinwaytech(御能)驱动器接线 (26)(1)、配置旋转变压器接线 (26)Ⅸ、匹配Inovance(汇川)、Modrol(蒙德)驱动器接线 (27)(1)、配置旋转变压器接线 (27)Ⅹ、匹配Vector(威科达)驱动器接线 (28)(1)、配置数字增量式编码器 (28)八、运行与维护 (29)衷心感谢您选用菲仕伺服电机,为使本电机一直维持良好的运行状态,请将本手册随整机附送给最终用户。
虽然在您的选型过程中,可能已经对本产品有所了解并与本公司的技术人员进行了某些沟通,但为充分发挥本电机最佳功能,仍请在使用前,仔细阅读本使用说明书,必要时请与PHASE的有关人员联系,获得必要的帮助,以便正确的使用和维护电机,使之运行可靠,经久耐用。
永磁同步电机调试过程基本调试一、检查PG卡信号1、编码器信号的检查上电,初始化,置E1.02.=4,用手转动电机主轴一圈,检测U2.06.是否有数值变化,U2.16.UVW状态是否准确。
注:需保证H5.06.=0(Z相校正无效),O2.05.=0(U2.06.检测)。
检测不到PG卡信号时请按照相应扩展卡检测说明进行检测。
详细内容请参照《FU-04扩展卡检测》或《FU-08扩展卡检测》2、编码器线数的检查(AB相正交编码器)在编码器线数未知的前提下,将编码器线数设定为2500,用手转动电机主轴至U2.06.=0000后,再转动主轴一圈,读取U2.06.数值a,该编码器线数为a/4。
NO:JSWJ-03-01-07-01二、试运行(必须在电机空载情况下进行)1、设定相应电机参数与编码器参数,E3.12.需设定为“100”。
2、电机磁偏角自学习A3.=3。
自学习前请将参数B2.02.设定为“150”。
3、将B1.01.与B1.02.置“0”。
用操作器给定电机频率运行。
注意事项:1、当电机极数不确定时,可选用V/f控制模式,5Hz运行,计算出电机1分钟内转动的圈数a,即电机极数:2*5Hz*60s/a2、当电机额定转速或额定频率不确定时,可通过下式推算:电机额定转速=电机额定频率*60/电机极对数电机极对数=电机极数/23、当电机额定电压不确定时,可选用闭环控制模式,以80%的额定转速分别正反转,同时调整电机额定电压值,至正转时输出扭矩U1.06.约为5%,反转时输出扭矩U1.06.约为-5%5、当电机处于错相状态下闭环启动时,电流偏大,并极可能产生过流报警。
此时请将参数H5.03.的数值由0修改成1(由1修改成0);或对调驱动器输出电源线UVW的其中两相。
调相后须重新进行电机磁偏角自学习。
6、当电机磁偏角设定错误时,电机起动时后产生跳动,并发生过流报警,请重新进行电机磁偏角自学习。
7、当电机磁偏角不能够确定时,请首先降低最大拖动扭矩E4.10.和制动扭矩E4.11.;以(电机极数/360)为间隔分别设定几个不同的电机磁偏角度H5.07.,直至电机能够旋转为止;对电机磁偏角进行微调,直至电机以额定转速正反转旋转时,驱动器输出电流U1.05.一致并<5%额定电流E3.03.注:永磁同步电机运行正常后卸下UVW电机接线再接上时,必须每根线缆都对应接线。
永磁同步电机参数测量试验⽅法(精编⽂档).doc【最新整理,下载后即可编辑】永磁同步电机参数测量实验⼀、实验⽬的1. 测量永磁同步电机定⼦电阻、交轴电感、直轴电感、转⼦磁链以及转动惯量。
⼆、实验内容1. 掌握永磁同步电机dq 坐标系下的电⽓数学模型以及机械模型。
2. 了解三相永磁同步电机内部结构。
3. 确定永磁同步电机定⼦电阻、交轴电感、直轴电感、反电势系数以及转动惯量。
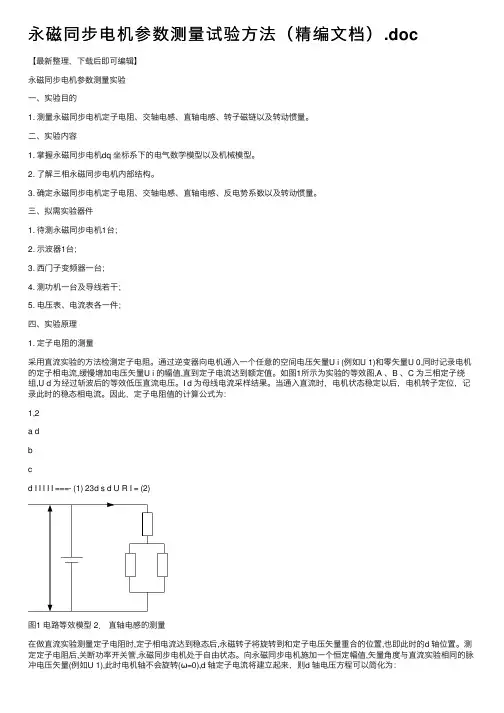
三、拟需实验器件1. 待测永磁同步电机1台;2. ⽰波器1台;3. 西门⼦变频器⼀台;4. 测功机⼀台及导线若⼲;5. 电压表、电流表各⼀件;四、实验原理1. 定⼦电阻的测量采⽤直流实验的⽅法检测定⼦电阻。
通过逆变器向电机通⼊⼀个任意的空间电压⽮量U i (例如U 1)和零⽮量U 0,同时记录电机的定⼦相电流,缓慢增加电压⽮量U i 的幅值,直到定⼦电流达到额定值。
如图1所⽰为实验的等效图,A 、B 、C 为三相定⼦绕组,U d 为经过斩波后的等效低压直流电压。
I d 为母线电流采样结果。
当通⼊直流时,电机状态稳定以后,电机转⼦定位,记录此时的稳态相电流。
因此,定⼦电阻值的计算公式为:1,2a dbcd I I I I I ===- (1) 23d s d U R I = (2)图1 电路等效模型 2.直轴电感的测量在做直流实验测量定⼦电阻时,定⼦相电流达到稳态后,永磁转⼦将旋转到和定⼦电压⽮量重合的位置,也即此时的d 轴位置。
测定定⼦电阻后,关断功率开关管,永磁同步电机处于⾃由状态。
向永磁同步电机施加⼀个恒定幅值,⽮量⾓度与直流实验相同的脉冲电压⽮量(例如U 1),此时电机轴不会旋转(ω=0),d 轴定⼦电流将建⽴起来,则d 轴电压⽅程可以简化为:d d d q q d di u Ri L i L dt ω=-+d d d d di u Ri L dt =+ (3)对于d 轴电压输⼊时的电流响应为:()(1)d R t L U i t e R -=- (4)利⽤式(4)以及测量得到的定⼦电阻值和观测的电流响应曲线可以计算得到直轴电感值。
目录第一章、使用 (1)1-1伺服门机驱动系统的介绍 (1)第二章、接线 (4)2-1相互接线 (4)2-2端子台的构成 (6)2-3控制回路端子的说明 (8)2-4接线检查 (10)第三章、伺服门机运行逻辑 (11)3-1运行原理 (11)3-2运行逻辑 (12)3-3运行调试 (15)第四章、参数说明及报警检出 (19)4-1参阅方法 (19)4-2参数组别 (20)4-3参数一览表 (21)4-4报警显示功能 (28)第五章、数字式操作器和参数组的概要 (34)5-1数字式操作器 (36)5-2参数组的概要 (37)第六章、保养.检查 (48)6-1保养.检查 (48)第七章、规格 (50)7-1IMS-DS2OP2C驱动器规格 (50)第一章、使用本章节说明伺服门机驱动系统到货时以及安装时的确认事项。
1-1伺服门机驱动系统的介绍◆IMS-DS2OP2C的机种IMS-DDM系列驱动器电源等级为单相200V级。
容量为240VA。
表1.1 IMS-DS2OP2C的机种注:详细性能参数请参照第七章『规格』。
■外型尺寸安装尺寸以下所示为驱动器的外形尺寸图图1.4 驱动器外型尺寸图■安装场所的确认和管理在如下条件的场所安装驱动器,并维持最适当的使用条件。
◆安装场所请安装在满足以下条件的场所:环境温度:-10~50℃环境湿度:90%RH(不结露)·请勿安装在金属粉末、油、水等容易进入驱动器内部的场所。
·请勿安装在有木材等易燃物的场所。
·请勿安装在阳光直射的场所。
◆作业时防止异物落入安装作业时,请在驱动器上面盖上防尘罩,注意切勿使钻孔铁屑等残余金属落入驱动器内部。
安装作业结束时,请拆下驱动器上盖的防尘罩,提高通气性和驱动器的散热性。
■安装空间为不降低驱动器的冷却效果,请务必按下图所示确保一定的空间。
以上图1.5 变频器的安装方向和空间请确保主回路接线的空间重要第二章、接线本章节说明主回路端子与控制回路端子的连接。
永磁同步电机调试的总结
1.测量电机的相位:U/V/W信号测量:相位差为120度。
测试方法:U/V/W分别外接一个电阻,阻值为10K欧姆。
然后三个电阻连接在一起为地线。
使用示波器的两个表笔,测量两路的信号,然后快速转动电机,则能测量到信号,观察信号的波形,比较出信号差。
测量连接图
2.Z信号位置测量
给编码器加电,编码器能提供Z信号。
使用示波器一路测量U路信号,一路测量Z信号;然后转动电机,观察波形。
同时查看Z脉冲和U路信号的波形,能大概得出他们之间的夹角。
3.测量A,B信号:用示波器采集A,B信号,得出相对的反转
和正转。
4.小角度转动:(Z信号一定得连接上,初始位置判断,可以
不用。
)
Angle角度为定置(电角度/360 + 0.48)*2*PI, 然后给定
Ud = 0; Uq = 0.3;电机正向转动;给负Uq = -0.3;电机反向转动。
Uq增加,速度增加。
5.在第四步的基础上,放开速度环,测量电机的转速。
测量
的转速和用示波器测量的A向的脉冲个数,分别计算转速,
得出的转速应该是一样的。
6.完全放开速度环,速度环得到的IQ_GIVEN值,直接给Uq
值,然后修改速度调节值,速度可以调试。
7.然后直接将电流环,也放开,则转动异常。
8.修改g_IQ_Given = 0.1;然后再进行测试,转速正常;
9.将电流环全部打开,分析坐标变换,没有发现问题,修改
了电流环的PI调节参数,PK = 0.05; KI=0.0002,然后速度可调。
需要进行进一步测试。
永磁同步电机调试、标定说明(VER:)设备需求:硬件:1、电脑一台(需有串口);2、串口数据线;软件:1、程序烧录软件:“”;2、串口监控软件:“”;标定台架典型控制模式:标定台架的典型系统连接方案如下图所示:上图中,负载电机可以是测功机或是对拖电机(注:负载电机峰值扭矩、峰值功率、最高转速等需大于待测驱动电机),负载电机使用转速控制模式,标定过程中由其控制需要的转速;被测驱动电机使用转矩控制模式,标定过程中控制实际转矩输出。
电机标定流程:各步骤操作详细说明:1、待标定电机信息收集:需要收集的电机信息详见如下表格,需完整填写表格中所有内容。
电机参数需求表.xlsx2、高压上电前确认:电机控制器:1、电机控制器母线正负接线正确;电机控制器与电机三相相序应控制器UVW与电机UVW一一对应;控制器外壳与电机外壳接地良好。
2、确认电机旋变变比与控制板匹配,控制器端旋变定义与电机端旋变定义一一对应。
3、控制器标称电流设置DF-10与驱动板拨码对应;4、若只上低压控制电,操作面板故障指示灯闪烁,说明当前存在故障,需根据故障码排除对应故障。
电机:1、确认电机温度电阻类型并设置功能码BA-00(温度电阻类型选择:1 PT100,2 PT1000 )及BA-01(电机过温保护点);若电机温度电阻未接入到电机控制器,可将BA-00设置为0屏蔽电机过温保护。
2、电机反电动势测试,以评估电机状态。
若电机反电动势谐波较大,正弦度较差,后续加载测试时可能容易出现控制异常。
3、电机调试:电机控制参数辨识:1、按照确认的电机参数设置功能码B1-00至B1-05及C4-12。
2、控制器上高压电,确认面板显示电压与实际电压一致;(B6-26=1,手动上电)3、确认电机可以自由转动,设置功能码B1-27 为12,按RUN键运行后即开始参数辨识,参数辨识后阶段电机会转动起来,辨识完成后自动停止。
4、辨识完成后检查C4-00、C4-01、C4-04、C4-10、C4-11等功能码的值,一般C4-00应小于C4-01;辨识3至4次,检查每次辨识完成后这些功能码的值是否有较大偏差,正常来说,每次辨识完成后这些参数应该基本一致;5、空载试转,调谐完成后空载状态下,设置一较小目标频率,电机应能正常转动,且输出电流正常一般应在10A以下。
M700简要操作说明-基本单元M700是多参数模块化过程测量仪表,分为基本单元(包括前面板和主机)、记忆卡、测量模块和通信模块。
该仪表具有革命性的设计概念,通过采用不同模块的组合,使仪表拥有非常强大的功能。
1. 仪表概述1.1. 前面板结构1.2. 主机和记忆卡插槽前面板固定螺钉(4个)仪表显示屏软件按钮箭头按键(4个)测量键 菜单键确认键报警指示灯 电源指示灯线缆接入口(5个)基本单元接线端子记忆卡插槽前面板和主机连线模块(3个插槽)1.3. 可搭配的模块和测量参数模块类型模块型号 模块说明测量模块 pH2700(X ) 可测量pH 、ORP (含温度) DO4700(X )可测量较高的溶解氧值(含温度) DO4700(X )ppb可测量较低的溶解氧值(含温度) Cond7700(X )可测量电导率/电阻率、浓度(含温度)Cond Ind7700(X ) 可测量电导率、浓度(含温度),连接电感式探头。
通信模块 Out700(X )输出模块 PID700(X )PID 控制模块 PA700(X )Profibus 通信模块1.4. 显示屏的说明2. 基本单元的接线2.1. 电源接线根据供电电源的不同,M700系列包括三种型号的仪表:➢ M700,普通型:24(-15%)至230(+15%)VAC/DC ;➢ M700X/VPW ,防爆型:100(-15%)至230(+15%)VAC (EEx em IIC ); ➢ M700X/24V ,防爆型:24VAC (-15%,+10%),24VDC (-15%,+20%)。
2.2. 主机接线2.2.1. M700接线测量状态指示 探头状态指示辅助参数显示 第一通道测量值第二通道测量值测量值单位测量通道指示端子说明:端子号功能端子号功能1、2、3、4 三个输出触点,4#为公共端11、12、13 两个输入触点,13#为公共端5、6 报警触点14、15、16、17 接地端子7、8 第一电流输出18、19 电源输入9、10 第二电流输出2.2.2. M700X/VPW接线端子说明:端子号功能端子号功能31、32、33 两个输入触点,33#为公共端61、62、63、64 三个输出触点,4#为公共端51、52 第一电流输出71、72 报警触点53、54 第二电流输出(PWR)L、N 电源输入(L火线,N零线)2.2.3. M700X/24V接线端子说明:端子号功能端子号功能31、32、33 两个输入触点,33#为公共端61、62、63、64 三个输出触点,4#为公共端51、52 第一电流输出71、72 报警触点53、54 第二电流输出(PWR)L1、L2 电源输入3. 安装3.1. 仪器的安装M700(X)可以进行表盘式安装,也可采用合适的安装件进行墙式安装或立柱式安装。
Unidrive M700 交流和伺服驱动器Unidrive M700 交流和伺服驱动器产品简介顶级感应和永磁伺服电机性能伴随实时以太网M700 通过精确的电机控制、板载实时以太网(IEEE 1588 V2精确时间协议)、先进的运动控制以及用于位置捕捉的高速I/O 实现机器最高生产率, 让机器制造商可以轻松地制造更复杂和灵活的机器。
通过客户选择的电机实现机器最高生产率凭借对几乎任何类型的工业电机的超卓控制性能,Unidrive M可实现机器最高生产率:•交流感应电机•永磁电机•伺服电机•同步磁阻电机•线性电机使用合适的编码器技术实现最佳性能和最大的可选择性Unidrive M700 有助于您基于具体应用的性能和成本选择合适的编码器技术。
板载反馈接口具备多通道的高性能连接,并支持几乎任何标准编码器反馈技术,包括Resolver、BISS 和EnDat 等设备。
优质选择,卓越性能及开放式技术Unidrive M 智能机器架构采用便于以太网和机器控制编程的高性能开放式技术,让机器制造者能够访问庞大的工程师人才库和选择自动化组件。
可轻松访问机器控制功能软件工具、键盘和存储设备可轻松快捷地访问Unidrive M 在配置、监控和诊断方面的机器控制功能。
可添加所需的额外功能Unidrive M700 可支持多达3 个可选插入式系统集成(SI) 模块,这些模块让它们可与制造自动化系统和其他厂商提供的设备无缝集成。
提供的功能包括通讯系统、扩展I/O、反馈设备、增强型安全功能及可扩展运动控制。
智能机器架构——开放式技术卓越的性能Control Techniques 智能机器架构是一种实现自动化的开放式方法,旨在实现机器最高生产率。
这可以通过由开放式且全球可用的工业标准以太网连在一起的智能控制设备、传感器与执行器组成的同步高性能网络来实现。
开放式标准可为机器制造者和OEM带来巨大效益:•每个机器组件均可选择“同级最优”的产品•熟悉的标准加快了机器开发和创新的速度•广泛接受的开放式标准有利于招聘具备所需专业知识的熟练工程技术人员智能机器架构有何不同之处?•标准网络硬件——没有限制的可集成性•轻松获得出色的性能——先进且易于使用的软件工具,经测试可加快机器开发并能使机器发挥最佳性能•网络效率得到提高——非集中式网络智能消除了网络流量瓶颈•包容性网络——支持PROFINET、EtherNet/IP 和Modbus TCP/IP,允许与全球自动化供应商提供的最广泛的自动化设备交互•独有的领先技术——智能机器架构以客户的反馈为基础并且自始至终只采用领先的开放式标准EC 61131-3 运动和自动化编程Unidrive M 让用户可以选择在驱动器内整合机器控制功能:•简单的基于CODESYS 的板载PLC• 1.5 轴高级运动控制器,主要特性包括:➮250μs 循环时间➮运动曲线生成器➮电子齿轮➮CAM 插补➮寻原点功能➮高速位置捕捉•高性能MCi200 和MCi210 机器控制模块(有助于获取更多的控制性能)机器控制工作软件——由CODESYS 驱动Control Techniques 的机器控制工作软件为对Unidrive M 新的自动化和运动控制功能进行编程提供了一个灵活、直观的环境。
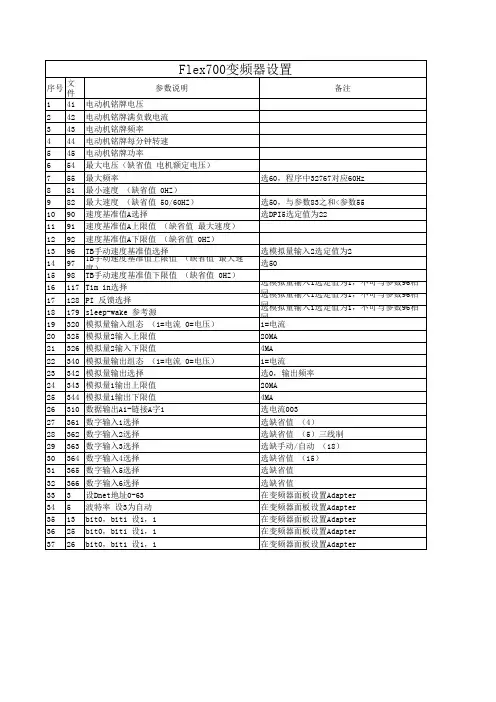
FRE700参数设置PR-CL 参数清除设置为11 上限频率设置为50HZ79 设置为2 外部运行固定模式77 设置为2 标示参数修改设置为1 标示无法修改参数7 加速时间30S8 减速时间30S0 转矩提升10-20 %125 模拟量速度给定的时候最大值所对应的频率50HZ 55 监视频率输出频率监视值输出到端子AM时的最大73 设置为0 表示0-10V驶入 1为0-5V输入83 额定电压380V84 额定频率80/81 电机容量/电机集数设置为9999 表示V/F 控制117 自由通讯地址118 通讯速度19200120 奇偶校验2标示无校验549 为1标示485通讯122 为9999 标示不进行通讯校验338 通讯运行指令权设置 10 启动指令权通讯1 启动指令权外部339 通讯速率指令权设置10 频率指令权通讯1 频率指令权外部2速度指令权外部(通讯方式的频率指令有效,频率指令端子2无效)79 运行模式选择 2 标示外部固定模式340 通讯启动模式选择 1 标示网络通讯模式写入加减速时间除以10为写入变频器的值读出的频率除以100为实际频率。
网线 3绿白 5 蓝白接红色线信号发送4 蓝 6 绿接蓝色的线信号接收低转速转矩提升P71 13P80 电机容量P81 电机基数P96 设置为1给定启动信号面板变为3时候完成P96 数值不能改变何谓先进磁通矢量控制?先进磁通矢量控制能够通过实施电压补偿使电机电流与负载转矩相匹配,以提高低速转矩。
同时实施输出频率的补偿(转差补偿),以使得电机的实际转速与速度指令值更为接近。
在负载的变动较为剧烈等情况下有效。
PowerFlex700变频器通过DriveTool设置参数的步骤硬件需求:PowerFlex700变频器通过ControlNet网络与PLC进行通信,PLC通过CPU上的串口或以太网模块上的网口与PC机进行通信。
软件需求: DriveTool软件以起升机构为例,介绍设置所有参数的步骤。
DriveTool/DriveExecutive。
在工具栏中Tools/Wizards/Port0:PowerFlex700/ PowerFlex700VC Startup Wizard。
2.弹出的画面中,左侧是快速启动的设置步骤。
这些步骤与面板操作时的启动步骤一样。
3.恢复出厂参数:4.电机操纵方式选择。
关于起升机构,选择FVC矢量操纵,与其相关的参数会自动显现,相当于将参数53选择了4以后,启用与之配套的默许参数。
关于平移机构,可选择0或2,可是原那么上无速度传感器矢量操纵仍是需要做电机自调剂的。
5.设置电机参数。
6.停机制动模式的选择。
7.方向测试。
测试电机运行的正方向。
若是方向相反,能够更改参数来反相。
注意该测试时不运行PLC或其他设备操纵变频器。
8.电机自整定。
9.斜率和速度限制。
12.数字量输出。
二.其他参数设置及说明P57:磁通成立方式。
(选择自动)自动---磁通成立的时刻取决于依照电动机铭牌数据和计算的时刻。
P58【磁通成立时刻】未利用。
手动---加速前的磁通的成立取决于P58【磁通成立时刻】。
P412:电动机反馈类型。
(选择0:正交)选择编码器类型:单通道或正交。
选项1和3用来选择编码器信号丢失(当利用微分输入时)而不管参数P080【反馈选择】的设置值。
关于FVC矢量操纵模式,仅利用正交编码器(选项0/1)。
P80:反馈选择(选择3编码器)选择电动机速度反馈的信号源。
开环操纵(0)---用于无编码器,不需要滑差补偿的场合。
滑差补偿(1)---用户需要紧密速度操纵并带有编码器时的场合。
编码器(3)---用于带有编码器的场合。
CT Unidrive M700系列驱动器和菲仕永磁同步伺服马达调试案例●调试技术要求:
➢菲仕永磁同步伺服电机闭环
➢上位机罗克韦尔PLC以太网通讯
●驱动器参数调试步骤:
1.确认驱动器和电机型号、规格等参数:
CT Unidrive:M700-03400100A10100AB100+KI-Keypad
Phase Motor:U30730A15.3
2.驱动器初始化操作:
✧断开STO/使能(T22和T31)或者Pr06.015=>OFF(初始化准备);
✧Prmm.000=>1253(50Hz交流电源频率);
✧Pr00.048=>RFC-S(运行模式设定);
✧按下红色复位按键(初始化完成)。
✧接通STO/使能(T22和T31)或者Pr06.015=>ON(驱动器使能待机)
3.更改用户安全级别/访问级别:
✧Pr00.049=>1(所有菜单均允许编辑)
4.编码器相关接线和参数设定:
✧菲仕电机编码器为绝对型,和CT驱动器完美兼容,接线图如下图所示:
✧Pr03.024=>0(RFC反馈模式:Feedback);
✧Pr03.026=>0(电机控制反馈选择:P1 Drive);
✧Pr03.034=>2500(P1每转旋转脉冲数:2500PPR);
✧Pr03.036=>0(P1电源电压:5V);
✧Pr03.038=>3(P1设备类型:AB Servo);
✧Pr03.039=>1(P1终端选择:AB启用,Z不启用);
✧Pr03.118=>1(P1热敏电阻类型:KTY84)。
5.电机参数设定和参数自调谐:
✧Pr05.007=>7.4(额定电流:7.4A);
✧Pr05.008=>1500(额定转速:1500RPM);
✧Pr05.009=>362(额定转速:1500RPM);
✧Pr05.011=>8(电机极数:8Poles);
✧Pr05.033=>224(每1000转电压:224V/1000RPM);
✧Pr05.012=>2(电机自调谐方式:ROTATING,※电机旋转自调谐务必保证电机
光轴,无负载输出);
✧Pr01.014=>4(给定选择器:Keypad);
✧按下键盘绿色运行按键,键盘显示Auto Tune,电机旋转自调谐,如果自调谐成
功完成,键盘显示Inhibit。
✧Pr06.015=>OFF(驱动器使能关闭);
✧Pr06.015=>ON(驱动器使能打开);
观察电机参数变化,反复执行上述操作至少3次,直至Pr03.025保持一个恒定值:✧Pr05.017=>?(M1定子阻抗);
✧Pr05.024=>?(M1Ld);
✧Pr05.072=>?(M1空载Lq);
✧Pr03.025=>?(位置反馈相角);
至此,电机参数自调谐成功调试完毕。
✧保存参数:Prmm.000=>1000,按下红色复位键(此步骤驱动器掉电之前务必操
做一次否则重新上电参数未保存驱动器E2PROM)。
6.其他参数:
✧Pr01.007=>0(最小给定值:0.0RPM);
✧Pr01.006=>1500(最小给定值:1500.0RPM);
✧Pr02.011=>2(M1加速时间:2.0S);
✧Pr02.021=>4(M1减速时间:4.0S);
✧Pr02.007=>2.5(加速度的最大变化率:2.5S2/100Hz);
✧Pr06.001=>1(停止方式:斜坡减速停机);
✧Pr01.014=>3(给定选择器:Present,通讯给定预设转速命令Pr01.021);
✧Pr06.043=>ON(控制字使能:通讯给定运行命令Pr06.042)。
7.驱动器以太网参数设定:
✧Pr4.02.005=>OFF(DHCP启用:关闭);
✧Pr4.02.006=>192.168.1.65(IP地址设定:根据现场实际情况设定);
8.以太网通讯地址映射参数设定:
✧Pr4.20.020=>16(输入组合对象大小:16Bytes,根据上位机以太网组态配置数
据访问长度设定);
✧Pr4.20.021=>16(输出组合对象大小:16Bytes,根据上位机以太网组态配置数
据访问长度设定);
✧Pr4.21.001=>0.10.040(输入映射参数1:状态字);
✧Pr4.21.002=>0.02.001(输入映射参数2:斜坡后给定);
✧Pr4.21.003=>0.04.001(输入映射参数3:电流幅值);
✧Pr4.21.004=>0.03.002(输入映射参数4:速度反馈);
✧Pr4.22.001=>0.06.042(输出映射参数1:控制字);
✧Pr4.22.002=>0.01.021(输出映射参数2:预设给定1);
✧Pr4.22.003=>0.00.000(输入映射参数3:N/A,未分配);
✧Pr4.22.004=>0.00.000(输入映射参数4:N/A,未分配)
✧保存参数:Prmm.000=>1000,按下红色复位键(此步骤驱动器掉电之前务必操
做一次否则重新上电参数未保存驱动器E2PROM)。
9.闭环控制电流环增益调节参数:
✧Pr04.013=>?(电流控制器Kp:根据给定速度和实际速度曲线波形情况调整,
通常电机自调谐后默认值即可)
✧Pr04.014=>?(电流控制器Ki:根据给定速度和实际速度曲线波形情况调整,
通常电机自调谐后默认值即可)
10.常用控制字释义:
✧正转:131(DEC)/1000 0011(BIN)
✧反转:137(DEC)/1000 1001(BIN)
✧有使能停止:129(DEC)/1000 0001(BIN)
✧无使能停止:128(DEC)/1000 0000(BIN)。