菲仕液压伺服电机参数
- 格式:pdf
- 大小:58.58 KB
- 文档页数:2

CT Unidrive M700系列驱动器和菲仕永磁同步伺服马达调试案例●调试技术要求:➢菲仕永磁同步伺服电机闭环➢上位机罗克韦尔PLC以太网通讯●驱动器参数调试步骤:1.确认驱动器和电机型号、规格等参数:CT Unidrive:M700-03400100A10100AB100+KI-KeypadPhase Motor:U30730A15.32.驱动器初始化操作:✧断开STO/使能(T22和T31)或者Pr06.015=>OFF(初始化准备);✧Prmm.000=>1253(50Hz交流电源频率);✧Pr00.048=>RFC-S(运行模式设定);✧按下红色复位按键(初始化完成)。
✧接通STO/使能(T22和T31)或者Pr06.015=>ON(驱动器使能待机)3.更改用户安全级别/访问级别:✧Pr00.049=>1(所有菜单均允许编辑)4.编码器相关接线和参数设定:✧菲仕电机编码器为绝对型,和CT驱动器完美兼容,接线图如下图所示:✧Pr03.024=>0(RFC反馈模式:Feedback);✧Pr03.026=>0(电机控制反馈选择:P1 Drive);✧Pr03.034=>2500(P1每转旋转脉冲数:2500PPR);✧Pr03.036=>0(P1电源电压:5V);✧Pr03.038=>3(P1设备类型:AB Servo);✧Pr03.039=>1(P1终端选择:AB启用,Z不启用);✧Pr03.118=>1(P1热敏电阻类型:KTY84)。
5.电机参数设定和参数自调谐:✧Pr05.007=>7.4(额定电流:7.4A);✧Pr05.008=>1500(额定转速:1500RPM);✧Pr05.009=>362(额定转速:1500RPM);✧Pr05.011=>8(电机极数:8Poles);✧Pr05.033=>224(每1000转电压:224V/1000RPM);✧Pr05.012=>2(电机自调谐方式:ROTATING,※电机旋转自调谐务必保证电机光轴,无负载输出);✧Pr01.014=>4(给定选择器:Keypad);✧按下键盘绿色运行按键,键盘显示Auto Tune,电机旋转自调谐,如果自调谐成功完成,键盘显示Inhibit。
广数,和利时电机,华大电机等等,国产自有品牌伺服。
功能简单,接口简易,多仿松下功能,以替代松下等低端日货为己任。
国内广泛采用的通用伺服品牌有:日系:三菱、安川、松下、三洋、富士、日立等;欧系:Lenze、AMK、Rexroth、KEB等;美系:Danaher(原Kollmogen)、Baldor、Parker、Rockwell等。
数控和高端运控伺服品牌:Siemens、Fanuc、三菱、Rexroth等;数控伺服情况与数控系统状况相当,Siemens和Fanuc为主,三菱次之。
国产通用伺服主要有:台达、东元、和利时、埃斯顿、时光、珠海运控、星辰伺服、步进科技等;国产数控伺服主要有:华中数控、广州数控、大森数控、凯奇数控等;国产伺服电机主要有:华大、登奇、强磁(苏强)、中源等。
国内广泛采用的通用伺服品牌有:日系:三菱、安川、松下、三洋、富士、日立等。
欧系:Lenze、AMK、Rexroth、KEB等美系:Danaher(原Kollmogen)、Baldor、Parker、Rockwell等数控和高端运控伺服品牌:Siemens、Fanuc、三菱、Rexroth等国货通用伺服:台达、东元、和利时、埃斯顿等国货数控伺服:华中、广数、大森、凯奇等国货伺服电机华大、登奇、强磁、博孚等目前通用伺服主要是日系厂家自己在拼,日系总体份额很大,估计不低于80%。
此外,台资和内资新秀们也在积极抢占市场,并有渐成气候之势。
欧系和美系产品性能明显由于日系,但价格也很高,多不是国内产业界用得起的。
数控伺服情况与数控系统状况相当,Siemens和Fanuc当道,三菱次之今天刚发现的这一家,应该是军工企业,电机规格全,国内看看除了凯奇在各类电机领域有所涉猎外,下面的这家技术实力不容小视泰安泰山新动力电机网址:自己搜吧产品类别无刷直流电机车辆牵引电机伺服电机主轴电机稀土永磁变频调速电机交流力矩电机矿山运输电机稀土永磁高效节能电机螺杆泵直驱电机磁悬浮电机井下永磁直线电机电机驱动器高速高效永磁发电机潜油电机高端异步变频电机调速系统按照性能的话一流的做伺服-LENZE,Bosch Rexroth,Baumuller,Rockwell AB,Kollmorgen,Berger Lahr,ELAU,SIEMENS,B&R,MOOG,日本的Oriental Motors和Yaskawa 的电机算是做的好的,国内的话登奇和华中电机的伺服还可以,其它一般。
HF 伺服电机 参数一览表整理:上海宇松技术部 日期:2010-7-232010.07.23宇松赵国胜M60SM60SM60SR-V1-20/40D-SVJ3-07D-V1-20DM-V3-20/40R-V1-20/40D-SVJ3-07D-V1-40DM-SPV3DM-V3-40R-V1-20/40D-SVJ3-10D-V1-40DM-SPV3DM-V3-40参数号代号解释SV001PC1马达侧齿轮比11111111111111SV002PC2机械侧齿轮比11111111111111SV003PGN1位置回路增益13333333333333333333333333333SV004PGN2位置回路增益200000000000000SV005VGN1速度回路增益1152210010040100100100455045100100100SV006VGN2速度回路增益200000000000000SV007-00000000000000SV008VIA 速度回路前进补偿13641364136413641364136413641364136413641364136413641364SV009IQA 前进电流回路q轴补偿6144204802048020480614420480204801024020480614415360102401024010240SV010IDA 前进电流回路d轴补偿6144204802048020480614420480204801024020480614415360102401024010240SV011IQG 电流回路q轴增益76817927687681280307230721280307210242560128012801280SV012IDG 电流回路d轴增益76817927687681280307230721280307210242560128012801280SV013ILMT 电流极限值1500800800800500800800800800500800800800800SV014ILMTsp 电流极限值(特殊控制用)500800800800500800800800800500800800800800SV015FFC 加速度前馈进给增益00000000000000SV016LMC1失位运动补正增益100000000000000SV017SPEC1绝对值伺服系统规格1000001000/14001000001400100010000014001000SV018PIT 导螺杆螺距——___—————__——_____SV019RNG1位置检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV020RNG2速度检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV021OLT 过负载时间常数6060606060606060606060606060SV022OLL 过负载检测等级150150150150150150150150150150150150150150SV023OD1误差宽度1(伺服ON时)66666666666666SV024INP 定位宽度5050505050505050505050505050SV025MTYP 马达型号221D 2201220122012210220322032203220322112204220422042204SV026OD2误差宽度2(伺服OFF时)66666666666666SV027SSF1特殊伺服机能选择 140004000400040004000400040004000400040004000400040004000SV028-00000000000000SV029VCS 速度变换时的速度回路增益00000000000000SV030IVC 电压不感带补正00000000000000SV031-00000000000000SV032TOF 转矩补正增益00000000000000SV033SSF2特殊伺服机能选择 200000000SV034SSF3特殊伺服机能选择 30000000000SV035SSF4特殊伺服机能选择 400000000000000SV036PTYP 回生电阻类型00000000000000SV037JL 负荷惯量倍率00000000000000SV038FHZ1机械共振抑制滤波器频率00000000000000SV039LMCD 失位运动补正延迟时间00000000000000SV040LMCT 前馈进给控制时不感带00000000000000SV041LMC2失位运动补正增益00000000000000SV042-00000000000000SV043OSB1外乱观测100000000000000SV044OSB2外乱观测200000000000000SV045-00000000000000SV046FHZ2机械共振抑制滤波器频率2M70HF104M70驱动器M70HF75系统类别HF电机HF54SV047EC1诱起电压补正增益100100100100100100100100100100100100100100 SV048EMGrt上下轴落下防止时间00000000000000 SV049PGN1sp主轴同期位置回路增益11515151515151515151515151515 SV050PGN2sp主轴同期位置回路增益200000000000000 SV051-00000000000000 SV052-00000000000000 SV053OD3误差宽度3误差00000000000000 SV054-00000000000000 SV055EMGX00000000000000 SV056EMGT减速控制时间常数00000000000000 SV057SHGC SHG控制增益00000000000000 SV058SHGCsp主轴同期时SHG控制增益00000000000000 SV059-00000000000000 SV060-00000000000000 SV061DA1NO D/A输出信道1资料号码00000000000000 SV062DA2NO D/A输出信道2资料号码00000000000000 SV063DA1MPY D/A输出信道1输出倍率00000000000000 SV064DA2MPY D/A输出信道2输出倍率00000000000000 SV094注二MPV磁极位置异常检测速度10000100000100000M60SM60SM60SR-V1-20/40D-SVJ3-10D-V1-20/40DM-V3-20/40R-V1-20D-SVJ3-10D-V1-20DM-V3-20/40R-V1-20D-SVJ3-10D-V1-20DM-V3-20/40参数号代号解释SV001PC1马达侧齿轮比111111111111SV002PC2机械侧齿轮比111111111111SV003PGN1位置回路增益1333333333333333333263333SV004PGN2位置回路增益20000000007000SV005VGN1速度回路增益13010010010070361001007034100100SV006VGN2速度回路增益2000000000000SV007-000000000000SV008VIA 速度回路前进补偿136413641364136413641364136413641364190013641364SV009IQA 前进电流回路q轴补偿61441024010240102401024020480102401024015360204801536015360SV010IDA 前进电流回路d轴补偿61441024010240102401024020480102401024015360204801536015360SV011IQG 电流回路q轴增益51251251251212804096153615362048614420482048SV012IDG 电流回路d轴增益51251251251212804096153615362048614420482048SV013ILMT 电流极限值1500800800800500800800800500800800800SV014ILMTsp 电流极限值(特殊控制用)500800800800500800800800500800800800SV015FFC 加速度前馈进给增益00000000010000SV016LMC1失位运动补正增益1000000000000SV017SPEC1绝对值伺服系统规格0001000/14001000100010001000/14001000100010000SV018PIT 导螺杆螺距________————__SV019RNG1位置检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV020RNG2速度检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV021OLT 过负载时间常数606060606060606060606060SV022OLL 过负载检测等级150150150150150150150150150150150150SV023OD1误差宽度1(伺服ON时)666666666666SV024INP 定位宽度505050505050505050505050SV025MTYP 马达型号220E 22022202220222242224222422242225222522252225SV026OD2误差宽度2(伺服OFF时)666666666666SV027SSF1特殊伺服机能选择 1400040004000400040004000400040004000400040004000SV028-000000000000SV029VCS 速度变换时的速度回路增益000000000000SV030IVC 电压不感带补正000000000000SV031-000000000000SV032TOF 转矩补正增益000000000000SV033SSF2特殊伺服机能选择 2000000000000SV034SSF3特殊伺服机能选择 30SV035SSF4特殊伺服机能选择 4000000000000SV036PTYP 回生电阻类型000000000000SV037JL 负荷惯量倍率000000000000SV038FHZ1机械共振抑制滤波器频率000000000000SV039LMCD 失位运动补正延迟时间000000000000SV040LMCT 前馈进给控制时不感带000000000000SV041LMC2失位运动补正增益000000000000SV042-000000000000SV043OSB1外乱观测1000000000000SV044OSB2外乱观测2000000000000SV045-HF电机系统类别驱动器HF105HF123HF142M70M70M70SV046FHZ2机械共振抑制滤波器频率2000000000000 SV047EC1诱起电压补正增益100100100100100100100100100100100100 SV048EMGrt上下轴落下防止时间000000000000 SV049PGN1sp主轴同期位置回路增益1151515151515151515151515 SV050PGN2sp主轴同期位置回路增益2000000000000 SV051-000000000000 SV052-000000000000 SV053OD3误差宽度3误差000000000000 SV054-000000000000 SV055EMGX000000000000 SV056EMGT减速控制时间常数000000000000 SV057SHGC SHG控制增益000000000000 SV058SHGCsp主轴同期时SHG控制增益000000000000 SV059-000000000000 SV060-000000000000 SV061DA1NO D/A输出信道1资料号码000000000000 SV062DA2NO D/A输出信道2资料号码000000000000 SV063DA1MPY D/A输出信道1输出倍率000000000000 SV064DA2MPY D/A输出信道2输出倍率000000000000 SV094注二MPV磁极位置异常检测速度100001000010000M60SM60SR-V1-40/60/80D-SVJ3-20D-V1-80DM-SPV3DM-V3-40R-V1-40D-SVJ3-10D-V1-40DM-SPV3DM-V3-40参数号代号解释SV001PC1马达侧齿轮比1111111111SV002PC2机械侧齿轮比1111111111SV003PGN1位置回路增益133333333333333332633SV004PGN2位置回路增益200000000700SV005VGN1速度回路增益14040100100100707010070100SV006VGN2速度回路增益20000000000SV007-0000000000SV008VIA 速度回路前进补偿1364136413641364136413641364136419001364SV009IQA 前进电流回路q轴补偿61441536010240102406144819210240819281928192SV010IDA 前进电流回路d轴补偿61441536010240102406144819210240819281928192SV011IQG 电流回路q轴增益1024256015361536102410241536128012801280SV012IDG 电流回路d轴增益1024256015361536102410241536128012801280SV013ILMT 电流极限值1500800800800800500800800800800SV014ILMTsp 电流极限值(特殊控制用)500800800800800500800800800800SV015FFC 加速度前馈进给增益000000001000SV016LMC1失位运动补正增益10000000000SV017SPEC1绝对值伺服系统规格1000000100010001000100014001000SV018PIT 导螺杆螺距_————————_____SV019RNG1位置检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV020RNG2速度检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV021OLT 过负载时间常数60606060606060606060SV022OLL 过负载检测等级150150150150150150150150150150SV023OD1误差宽度1(伺服ON时)6666666666SV024INP 定位宽度50505050505050505050SV025MTYP 马达型号2212220522052205220F 22262226222622262226/222D 注1SV026OD2误差宽度2(伺服OFF时)6666666666SV027SSF1特殊伺服机能选择 14000400040004000400040004000400040004000SV028-0000000000SV029VCS 速度变换时的速度回路增益0000000000SV030IVC 电压不感带补正0000000000SV031-0000000000SV032TOF 转矩补正增益0000000000SV033SSF2特殊伺服机能选择 2000SV034SSF3特殊伺服机能选择 30000000000SV035SSF4特殊伺服机能选择 40000000000SV036PTYP 回生电阻类型0000000000SV037JL 负荷惯量倍率0000000000SV038FHZ1机械共振抑制滤波器频率0000000000SV039LMCD 失位运动补正延迟时间0000000000SV040LMCT 前馈进给控制时不感带0000000000SV041LMC2失位运动补正增益0000000000SV042-0000000000SV043OSB1外乱观测10000000000SV044OSB2外乱观测20000000000SV045-0000000000SV046FHZ2机械共振抑制滤波器频率2系统类别驱动器HF223M70M70HF154HF电机SV047EC1诱起电压补正增益100100100100100100100100100100 SV048EMGrt上下轴落下防止时间0000000000 SV049PGN1sp主轴同期位置回路增益115151515151515151515 SV050PGN2sp主轴同期位置回路增益20000000000 SV051-0000000000 SV052-0000000000 SV053OD3误差宽度3误差0000000000 SV054-0000000000 SV055EMGX0000000000 SV056EMGT减速控制时间常数0000000000 SV057SHGC SHG控制增益0000000000 SV058SHGCsp主轴同期时SHG控制增益0000000000 SV059-0000000000 SV060-0000000000 SV061DA1NO D/A输出信道1资料号码0000000000 SV062DA2NO D/A输出信道2资料号码0000000000 SV063DA1MPY D/A输出信道1输出倍率0000000000 SV064DA2MPY D/A输出信道2输出倍率0000000000 SV094注二MPV磁极位置异常检测速度100000100000M60SM60SM60SR-V1-60D-SVJ3-20D-V1-80R-V1-40D-SVJ3-10D-V1-40DM-SPV3DM-V3-40-V1-40/60/8D-SVJ3-20D-V1-80DM-SPV3参数号代号解释SV001PC1马达侧齿轮比111111111111SV002PC2机械侧齿轮比111111111111SV003PGN1位置回路增益1333333333333333333333333SV004PGN2位置回路增益2000000000000SV005VGN1速度回路增益170100100701401001001007510010090SV006VGN2速度回路增益2000000000000SV007-000000000000SV008VIA 速度回路前进补偿136413641364136413641364136413641364136413641364SV009IQA 前进电流回路q轴补偿61441024081924096102408192819281926144819281928192SV010IDA 前进电流回路d轴补偿61441024081924096102408192819281926144819281928192SV011IQG 电流回路q轴增益76815361280128030722048204820481024307220482048SV012IDG 电流回路d轴增益76815361280128030722048204820481024307220482048SV013ILMT 电流极限值1500800800500800800800800800800800800SV014ILMTsp 电流极限值(特殊控制用)500800800500800800800800800800800800SV015FFC 加速度前馈进给增益000000000000SV016LMC1失位运动补正增益1000000000000SV017SPEC1绝对值伺服系统规格100010001000100010001000140010001000001000SV018PIT 导螺杆螺距——_————__——————————_SV019RNG1位置检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV020RNG2速度检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV021OLT 过负载时间常数606060606060606060606060SV022OLL 过负载检测等级150150150150150150150150150150150150SV023OD1误差宽度1(伺服ON时)666666666666SV024INP 定位宽度505050505050505050505050SV025MTYP 马达型号22162206220622272227222722272227/222E 注一2213220722072207SV026OD2误差宽度2(伺服OFF时)666666666666SV027SSF1特殊伺服机能选择 1400040004000400040004000400040004000400040004000SV028-000000000000SV029VCS 速度变换时的速度回路增益000000000000SV030IVC 电压不感带补正000000000000SV031-000000000000SV032TOF 转矩补正增益000000000000SV033SSF2特殊伺服机能选择 2000000000000SV034SSF3特殊伺服机能选择 3000SV035SSF4特殊伺服机能选择 4000000000000SV036PTYP 回生电阻类型000000000000SV037JL 负荷惯量倍率000000000000SV038FHZ1机械共振抑制滤波器频率000000000000SV039LMCD 失位运动补正延迟时间000000000000SV040LMCT 前馈进给控制时不感带000000000000SV041LMC2失位运动补正增益000000000000SV042-000000000000SV043OSB1外乱观测1000000000000SV044OSB2外乱观测2000000000000SV045-000000000000SV046FHZ2机械共振抑制滤波器频率2系统类别驱动器M70M70HF224HF302HF电机HF204M70SV047EC1诱起电压补正增益100100100100100100100100100100100100 SV048EMGrt上下轴落下防止时间000000000000 SV049PGN1sp主轴同期位置回路增益1151515151515151515151515 SV050PGN2sp主轴同期位置回路增益2000000000000 SV051-000000000000 SV052-000000000000 SV053OD3误差宽度3误差000000000000 SV054-000000000000 SV055EMGX000000000000 SV056EMGT减速控制时间常数000000000000 SV057SHGC SHG控制增益000000000000 SV058SHGCsp主轴同期时SHG控制增益000000000000 SV059-000000000000 SV060-000000000000 SV061DA1NO D/A输出信道1资料号码000000000000 SV062DA2NO D/A输出信道2资料号码000000000000 SV063DA1MPY D/A输出信道1输出倍率000000000000 SV064DA2MPY D/A输出信道2输出倍率000000000000 SV094注二MPV磁极位置异常检测速度10001000000000HF453HF703HF903M60SM60SM70M70M70R-V1-60D-SVJ3-20D-V1-80DM-SPV3R-V1-60/80D-SVJ3-35D-V1-160D-V1-160D-V1-160W D-V1-320参数号代号解释SV001PC1马达侧齿轮比1111111111SV002PC2机械侧齿轮比1111111111SV003PGN1位置回路增益133333333333333333333SV004PGN2位置回路增益20000000000SV005VGN1速度回路增益1140110100100120110100100100100SV006VGN2速度回路增益20000000000SV007-0000000000SV008VIA 速度回路前进补偿1364136413641364136413641364136413641364SV009IQA 前进电流回路q轴补偿409681921024010240614461448192614461444096SV010IDA 前进电流回路d轴补偿409681921024010240614461448192614461444096SV011IQG 电流回路q轴增益1280256020482048102420482048204820481536SV012IDG 电流回路d轴增益1280256020482048102420482048204820481536SV013ILMT 电流极限值1500800800800500800800800800800SV014ILMTsp 电流极限值(特殊控制用)500800800800500800800800800800SV015FFC 加速度前馈进给增益0000000000SV016LMC1失位运动补正增益10000000000SV017SPEC1绝对值伺服系统规格1000100010001000100000000SV018PIT 导螺杆螺距__________SV019RNG1位置检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV020RNG2速度检测器分辨率/A42/A4260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000260/1000SV021OLT 过负载时间常数60606060606060606060SV022OLL 过负载检测等级150150150150150150150150150150SV023OD1误差宽度1(伺服ON时)6666666666SV024INP 定位宽度50505050505050505050SV025MTYP 马达型号22282228222822282214220822082209220A 220B SV026OD2误差宽度2(伺服OFF时)6666666666SV027SSF1特殊伺服机能选择 14000400040004000400040004000400040004000SV028-0000000000SV029VCS 速度变换时的速度回路增益0000000000SV030IVC 电压不感带补正0000000000SV031-0000000000SV032TOF 转矩补正增益0000000000SV033SSF2特殊伺服机能选择 20000000000SV034SSF3特殊伺服机能选择 30SV035SSF4特殊伺服机能选择 40000000000SV036PTYP 回生电阻类型0000000000SV037JL 负荷惯量倍率0000000000SV038FHZ1机械共振抑制滤波器频率0000000000SV039LMCD 失位运动补正延迟时间0000000000SV040LMCT 前馈进给控制时不感带0000000000SV041LMC2失位运动补正增益0000000000SV042-0000000000SV043OSB1外乱观测10000000000SV044OSB2外乱观测20000000000SV045-0000000000SV046FHZ2机械共振抑制滤波器频率2驱动器HF354M70HF电机系统类别HF303M70SV047EC1诱起电压补正增益100100100100100100100100100100 SV048EMGrt上下轴落下防止时间0000000000 SV049PGN1sp主轴同期位置回路增益115151515151515151515 SV050PGN2sp主轴同期位置回路增益20000000000 SV051-0000000000 SV052-0000000000 SV053OD3误差宽度3误差0000000000 SV054-0000000000 SV055EMGX0000000000 SV056EMGT减速控制时间常数0000000000 SV057SHGC SHG控制增益0000000000 SV058SHGCsp主轴同期时SHG控制增益0000000000 SV059-0000000000 SV060-0000000000 SV061DA1NO D/A输出信道1资料号码0000000000 SV062DA2NO D/A输出信道2资料号码0000000000 SV063DA1MPY D/A输出信道1输出倍率0000000000 SV064DA2MPY D/A输出信道2输出倍率0000000000 SV094注二MPV磁极位置异常检测速度100001000000宇松2010.07.23赵国胜。
AX-V 全数字交流伺服驱动器用户手册宁波菲仕电机技术有限公司版本号:AXV-SPDV-1-0序言感谢您购买宁波菲仕电机技术有限公司的菲仕AX-V全数字交流伺服驱动器(以下简称驱动器)产品。
AX-V系列伺服驱动器是针对交流永磁伺服电机控制用的高品质、多功能、低噪音的伺服驱动器,可对伺服电机实现速度、力矩和位置高精度、高响应的控制。
AX-V系列伺服驱动器为您提供了丰富而又强大的功能:✧可以通过RS-485、CanOpen总线、ProfiBus总线与上位控制器通信,驱动器的所有参数和指令均可以通过上位控制器以通信的方式传送给驱动器。
✧通过Intradrive总线可以使驱动器与驱动器之间实现高速的通信,在需要多个驱动器联动的场合更具有优越性。
✧可以适配多种编码器,具体的有正余弦编码器、光电增量式编码器、旋转变压器、绝对值式编码器等,并都能使电机获得相当的控制性能。
✧AX-V系列驱动器具有可编程功能,允许用户对伺服驱动器进行程序开发,并且有8个数字量输入点、8个数字量输出点、3个模拟量输入口、4个模拟量输出口供用户编程使用,具有很大的灵活性。
而且,用户可以根据实际工作场合要求开发适合于自己使用的应用工程软件。
✧我公司为用户提供了速度、位置控制标准应用工程软件,可以满足大多数控制场合的使用要求。
在使用AX-V系列驱动器之前,请仔细阅读本手册,以保证正确使用。
错误的操作和使用可能造成驱动器运行不正常、发生故障或者降低使用寿命,并有可能造成驱动器损坏、人身伤害等事故。
因此使用前应反复阅读本手册,并严格按照操作说明使用。
本手册为驱动器的随机附件,务必请您使用后妥善保管,以备今后对驱动器进行检修和维护时使用。
第一章注意事项1.1 开箱检查......................................P3 1.2 驱动器的型号说明..............................P3 1.3 安全注意事项..................................P3 1.3.1 安装注意事项................................P4 1.3.2 接线注意事项................................P4 1.3.3 维护注意事项................................P5 1.3.4 使用注意事项................................P5 1.3.5 报废时注意事项..............................P51.1 开箱检查在开箱时,请认真确认下列各项:在运输途中是否有破损现象驱动器型号是否与您的订货要求相一致附件是否齐全,包装箱内装有如下器件:●驱动器一台●驱动器接线端子排三个●25芯编码器插头一个●用户手册一套如发现有不符合或者遗漏的情况,请立即与我公司联系!1.2驱动器的型号说明AX-V1.3安全注意事项危险:如果没有按照要求进行操作,可能会造成设备的严重损坏或者人员的伤害。
宁波菲仕运动控制技术有限公司宁波菲仕电机技术有限公司永磁交流伺服电机Ultract III(第二版)使用说明书目录一、概述 (3)二、规范说明 (3)三、检查 (3)四、安装 (4)五、编码器配置 (4)六、接线 (6)七、PHASE电机与驱动器接线 (10)Ⅰ、匹配PHASE驱动器接线 (10)(1)、配置正余弦编码器接线 (10)(2)、配置绝对值编码器接线 (11)(3)、配置旋转变压器接线 (12)Ⅱ、匹配LENZE驱动器接线 (13)(1)、配置旋转变压器接线 (13)(2)、配置绝对值编码器接线 (14)(3)、配置数字增量式编码器接线 (15)Ⅲ、匹配KEB驱动器接线 (16)(1)、配置正余弦编码器接线 (16)(2)、配置旋转变压器接线 (17)(3)、配置绝对值编码器接线 (18)Ⅳ、匹配SIEMENS驱动器接线 (19)(1)、配置正余弦编码器接线 (19)(2)、配置旋转变压器接线 (20)Ⅴ、匹配Schneider驱动器接线 (21)(1)、配置旋转变压器接线 (21)(2/3)、配置绝对值编码器接线 (22)Ⅵ、匹配B&R驱动器接线 (24)(1)、配置绝对值编码器接线 (24)Ⅶ、匹配CT驱动器接线 (25)(1)、配置绝对值编码器接线 (25)Ⅷ、匹配Kinwaytech(御能)驱动器接线 (26)(1)、配置旋转变压器接线 (26)Ⅸ、匹配Inovance(汇川)、Modrol(蒙德)驱动器接线 (27)(1)、配置旋转变压器接线 (27)Ⅹ、匹配Vector(威科达)驱动器接线 (28)(1)、配置数字增量式编码器 (28)八、运行与维护 (29)衷心感谢您选用菲仕伺服电机,为使本电机一直维持良好的运行状态,请将本手册随整机附送给最终用户。
虽然在您的选型过程中,可能已经对本产品有所了解并与本公司的技术人员进行了某些沟通,但为充分发挥本电机最佳功能,仍请在使用前,仔细阅读本使用说明书,必要时请与PHASE的有关人员联系,获得必要的帮助,以便正确的使用和维护电机,使之运行可靠,经久耐用。
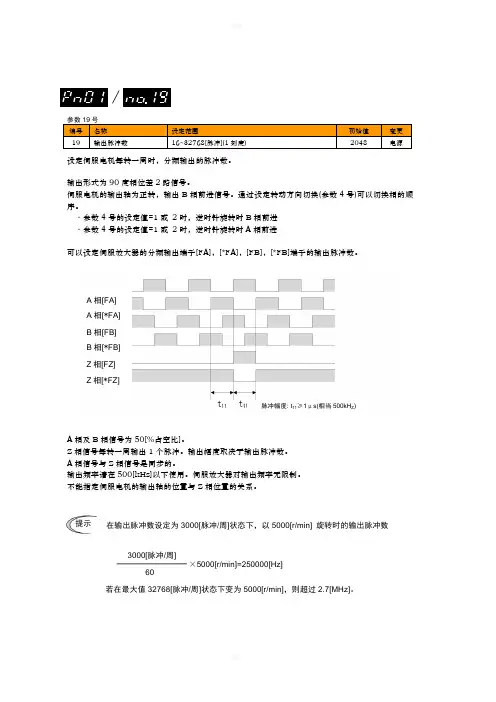
/参数19号 编号 名称 设定范围初始值 变更 19输出脉冲数16~32768[脉冲](1刻度)2048电源设定伺服电机每转一周时,分频输出的脉冲数。
输出形式为90度相位差2路信号。
伺服电机的输出轴为正转,输出B 相前进信号。
通过设定转动方向切换(参数4号)可以切换相的顺序。
・参数4号的设定值=1或 2时,逆时针旋转时B 相前进 ・参数4号的设定值=1或 2时,逆时针旋转时A 相前进可以设定伺服放大器的分频输出端子[FA],[*FA],[FB],[*FB]端子的输出脉冲数。
A 相及B 相信号为50[%占空比]。
Z 相信号每转一周输出1个脉冲。
输出幅度取决于输出脉冲数。
A 相信号与Z 相信号是同步的。
输出频率请在500[kHz]以下使用。
伺服放大器对输出频率无限制。
不能指定伺服电机的输出轴的位置与Z 相位置的关系。
B 相[FB] B 相[*FB] Z 相[*FZ]A 相[*FA] A 相[FA] Z 相[FZ] 脉冲幅度: t 11≥1μs(相当500kH Z )在输出脉冲数设定为3000[脉冲/周]状态下,以5000[r/min] 旋转时的输出脉冲数3000[脉冲/周]60×5000[r/min]=250000[Hz]若在最大值32768[脉冲/周]状态下变为5000[r/min],则超过2.7[MHz]。
提示/编号 名称 设定范围初始值 变更 20Z 相补偿0~65535[X2脉冲](1刻度)电源变更Z 相的输出位置时设定。
在CCW(逆时针)方向,只有参数20号设定的脉冲量偏离Z 相的输出位置。
该参数与转动方向切换(参数4号)无关。
在Z 旋转时,在CCW(逆时针)方向出现Z 相的输出位置偏移。
■Z 相的输出位置 ・Z 相补偿值为[0]时 ・Z 相补偿值为[16384]时※键的位置不是Z 相。
用于说明时,暂时将键位置设为Z 相。
■相关可以利用触摸面板的试运行模式调整Z 相位置,以便让当前位置变为Z 相输出位置。

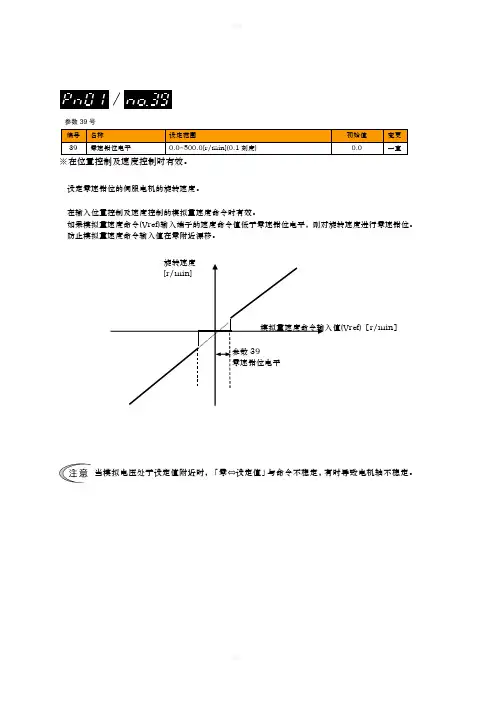
/参数39号编号名称设定范围初始值变更39零速钳位电平0.0~500.0[r/min](0.1刻度)0.0一直设定零速钳位的伺服电机的旋转速度。
在输入位置控制及速度控制的模拟量速度命令时有效。
如果模拟量速度命令(Vref)输入端子的速度命令值低于零速钳位电平,则对旋转速度进行零速钳位。
防止模拟量速度命令输入值在零附近漂移。
旋转速度[r/min]模拟量速度命令输入值(Vref)[r/min]参数39零速钳位电平当模拟电压处于设定值附近时,「零⇔设定值」与命令不稳定,有时导致电机轴不稳定。
控制系统的设定按编号记载控制系统设定参数的设定内容。
■控制方框图表示FALDIC-W 系列的控制方框图。
减振控制(兼用)(兼用)输入指令控制序列端子反共振频率0 CONTn反共振频率选择0/1 (分配号9,10)注)在P 的后面记载的数值为参数号。
例)P10→参数10号命令跟踪控制选择自动提前增益命令跟 踪控制反共振频率1反共振频率2 反共振频率3 输入脉冲串CONTn命令脉冲α选择0/1 (分配号12,13)CONTn禁止命令脉冲 (分配号: 11)前馈前馈过滤器时间常数输入脉冲串形式命令脉冲补偿S 字时 间常数位置调节器增益输入速度命令Vref模拟量 命令补偿 模拟量 命令增益脉冲发生软启动S 字时 间常数手动进行速度1~3CONTn 多段速度1/2 (分配号: 17,18) CONTn 加减速时间选择 (分配号: 19)输入转矩命令 (Vref 兼用)模拟量 命令补偿 模拟量命令增益 转矩设定过滤器分频电路分频输出端子※若接通禁止命令脉冲,则可以手动运行(位置JOG)。
切换控制模式:P09=3(位置⇔速度)时CONTn切换控制模式(分配号: 14)切换控制模式:P09=4(位置⇔转矩)或5(速度⇔转矩)时CONTn切换控制模式(分配号: 14)速度设定过滤器电流控制陷波滤波器转矩过滤器时间常数P1控制惯量推断负荷惯量比自动调整调整模式自动调谐增益P05(调整模式)在「0: 自动调整」或「1: 半自动调整」下时,注)在P的后面记载的数值为参数编号。

Type U301.20.30.94Nm 1.18Nm 2000Rpm 2500Rpm 0.45A 0.57A 0.20Kw2.30Nm/A 139V/Krpm 133Hz 118.34Ohm 120.80mH -V 370V 0.13mkgm2 2.2kg 2.9kg U301.60.30.95Nm 1.39Nm 6000Rpm 7400Rpm 1.30A 2.00A 0.60Kw 0.48Nm/A29V/Krpm 400Hz 10.17Ohm 14.53mH -V 372V 0.13mkgm2 2.2kg 2.9kg U302.20.3 2.00Nm 2.48Nm 2000Rpm 2500Rpm 0.98A 1.19A 0.42Kw 2.30Nm/A 139V/Krpm 133Hz 41.30Ohm 59.20mH -V 371V 0.194mkgm2 2.7kg 3.4kg U302.50.3 2.00Nm2.60Nm 5000Rpm 6000Rpm 2.00A 2.60A 1.05Kw 1.09Nm/A 66V/Krpm 333Hz8.51Ohm 14.55mH -V 333V 0.194mkgm2 2.7kg 3.4kg U304.10.3 3.90Nm 3.95Nm 1000Rpm 1500Rpm 1.00A 1.10A 0.41Kw 3.95Nm/A 239V/Krpm 67Hz 87.44Ohm 120.36mH -V 380V 0.156mkgm2 4.5kg 5.2kg U304.20.3 4.18Nm 4.91Nm 2000Rpm 2500Rpm 2.00A 2.36A 0.88Kw 2.29Nm/A 139V/Krpm 133Hz 15.85Ohm 29.58mH -V 371V0.156mkgm2 4.5kg 5.2kg U304.50.2 3.95Nm 4.00Nm 5000Rpm 7500Rpm 10.00A 10.00A 2.07Kw 0.43Nm/A 26V/Krpm 333Hz 0.48Ohm 1.40mH 201V-V 0.156mkgm2 4.5kg 5.2kg U304.50.3 3.95Nm 4.00Nm 5000Rpm 7500Rpm5.50A6.10A 2.07Kw 0.73Nm/A 44V/Krpm 333Hz 1.40Ohm 4.10mH -V 344V0.156mkgm2 4.5kg 5.2kg U503.20.3 3.80Nm 4.42Nm 2000Rpm 2628Rpm 1.65A 1.80A 0.80Kw 2.28Nm/A 138V/Krpm 133Hz 16.88Ohm 63.67mH -V 338V 0.97mkgm2 4.8kg 5.8kg U503.30.3 3.00Nm 3.50Nm 3000Rpm 3200Rpm 2.20A 2.56A 0.94Kw 1.36Nm/A 82V/Krpm 200Hz 7.01Ohm 31.60mH -V 374V 0.97mkgm2 4.8kg 5.8kg U503.40.32.80Nm3.50Nm 4000Rpm 6000Rpm 3.20A4.30A 1.17Kw 0.93Nm/A 56V/Krpm267Hz 3.30Ohm 9.00mH -V 375V 0.97mkgm2 4.8kg 5.8kg U503.50.3 2.00Nm 3.50Nm 5000Rpm 5200Rpm 2.20A 3.80A 1.05Kw 1.00Nm/A 61V/Krpm 333Hz 3.14Ohm14.30mH -V 376V 0.97mkgm2 4.8kg 5.8kg U505.20.3 5.08Nm 5.30Nm 1500Rpm 2244Rpm 2.00A 2.10A 0.80Kw 2.71Nm/A 164V/Krpm 133Hz 13.96Ohm 56.43mH -V 295V1.13mkgm2 5.7kg 6.7kg U505.30.2 3.50Nm 5.00Nm 3000Rpm 4000Rpm 6.00A 7.00A 1.10Kw 0.65Nm/A 39V/Krpm 200Hz 0.97Ohm2.94mH 170V-V 1.13mkgm2 5.7kg 6.7kg U505.40.3 4.00Nm 5.52Nm 4000Rpm 4800Rpm 4.20A4.30A 1.68Kw 1.36Nm/A 82V/Krpm 267Hz 3.65Ohm 14.05mH -V 372V 1.13mkgm25.7kg6.7kg U506.20.3 6.44Nm7.34Nm 2000Rpm 2568Rpm 2.90A 3.30A 1.35Kw2.32Nm/A 141V/Krpm 133Hz 6.92Ohm 31.04mH -V 322V1.13mkgm2 6.8kg 7.8kg U506.20.2 5.70Nm 7.62Nm 2000Rpm 2500Rpm 4.40A 5.87A 1.19Kw 1.36Nm/A 82V/Krpm 133Hz2.12Ohm 9.68mH 180V-V 1.13mkgm2 6.8kg 7.8kg U506.30.3 5.50Nm 6.63Nm 3000Rpm 3200Rpm 3.53A 4.24A 1.73Kw 1.56Nm/A 94V/Krpm 200Hz 3.37Ohm 20.60mH -V 349V1.13mkgm2 6.8kg 7.8kg U506.30.2 5.80Nm 7.62Nm 3000Rpm 4000Rpm 8.53A 13.96A 1.82Kw 0.68Nm/A 41V/Krpm 200Hz 0.65Ohm2.42mH 175V-V 1.13mkgm2 6.8kg 7.8kg U506.40.3 4.50Nm 5.87Nm 4000Rpm 5000Rpm 3.20A 4.80A 1.88Kw 1.29Nm/A 78V/Krpm 267Hz 2.25Ohm 9.79mH -V 375V1.13mkgm2 6.8kg 7.8kg U509.30.2 6.60Nm 9.20Nm 3000Rpm 4000Rpm 8.50A 12.40A 2.07Kw 0.85Nm/A 51V/Krpm 200Hz 0.54Ohm 2.03mH 211V-V 1.33mkgm28.8kg 9.8kg U509.20.39.16Nm 10.40Nm 2000Rpm 2378Rpm 3.70A 4.05A 1.92Kw 2.55Nm/A 154V/Krpm 133Hz 4.83Ohm 25.77mH -V 346V1.33mkgm28.8kg 9.8kg U509.40.3 6.00Nm 9.98Nm 4000Rpm 4200Rpm 4.00A 8.00A2.51Kw 1.28Nm/A 77V/Krpm 267Hz 1.12Ohm 7.74mH -V 378V 1.33mkgm28.8kg9.8kg U512.20.311.24Nm 13.18Nm 2000Rpm 2473Rpm 4.80A 5.50A 2.35Kw2.52Nm/A 153V/Krpm 133Hz 2.97Ohm 17.29mH -V 334V 1.42mkgm210.8kg 11.8kg U512.40.3 6.00Nm 12.84Nm 2500Rpm 4500Rpm 5.00A 11.00A 1.57Kw 1.22Nm/A74V/Krpm 267Hz 0.80Ohm 5.27mH -V 378V 1.42mkgm210.8kg 11.8kg U710.10.36.40Nm7.80Nm 1000Rpm 1500Rpm 1.50A 1.90A 0.67Kw 4.33Nm/A 262.08V/Krpm 67Hz 18.90Ohm 90.20mH -V 373V 0.73mkgm28.5kg 11.5kg U710.40.39.60Nm10.50Nm 4000Rpm 4100Rpm 6.70A 6.70A 4.02Kw 1.58Nm/A 95.63V/Krpm 267Hz 1.99Ohm 10.73mH -V 391V 0.73mkgm28.5kg 11.5kg U710.50.3 5.89Nm 8.98Nm 5175Rpm 5300Rpm 5.35A 8.60A 3.19Kw 1.10Nm/A 66.58V/Krpm 333Hz 1.03Ohm 8.10mH -V 375V 0.73mkgm28.5kg 11.5kg U715.35.312.35Nm 12.74Nm 3500Rpm 5000Rpm 7.10A 7.70A 4.53Kw 1.74Nm/A 105.32V/Krpm 233Hz 1.38Ohm 12.08mH -V 394V1.0mkgm210.2kg 13.2kg U715.50.2 6.00Nm 12.00Nm 4500Rpm 5000Rpm 10.00A 21.60A 2.83Kw 0.62Nm/A 37.53V/Krpm 333Hz 0.14Ohm 1.53mH 174V-V 1.0mkgm210.2kg 13.2kg U720.05.316.80Nm 18.40Nm 500Rpm 800Rpm 2.00A 2.20A 0.88Kw 9.20Nm/A 556.85V/Krpm 33Hz 26.90Ohm 193.60mH -V 330V1.3mkgm211.9kg 14.9kg U720.15.317.00Nm 19.00Nm 1500Rpm 1800Rpm 5.73A6.44A 2.67Kw 3.29Nm/A 199.13V/Krpm 100Hz 2.88Ohm 31.24mH -V 371V1.3mkgm211.9kg 14.9kg U720.20.311.70Nm 16.00Nm 2000Rpm 2500Rpm 5.09A6.61A 2.45Kw 2.53Nm/A 153.13V/Krpm 133Hz 2.33Ohm 14.88mH -V 322V1.3mkgm211.9kg 14.9kg U720.30.216.00Nm 19.00Nm 3000Rpm 4000Rpm 16.50A 20.67A 5.03Kw 0.99Nm/A 59.92V/Krpm 200Hz 0.36Ohm 3.96mH 204V-V 1.3mkgm211.9kg 14.9kg U720.30.316.80Nm 16.80Nm 3000Rpm 3700Rpm 11.80A 11.80A 5.28Kw 1.59Nm/A 95.94V/Krpm 200Hz 0.67Ohm 5.70mH -V 291V1.3mkgm211.9kg 14.9kg U720.40.312.40Nm 17.79Nm 4000Rpm 4800Rpm 10.50A 15.19A 5.19Kw 1.28Nm/A 77.47V/Krpm 267Hz 0.55Ohm3.90mH -V 319V1.3mkgm213.6kg 16.6kg U725.50.214.00Nm 23.16Nm 4500Rpm 5000Rpm 20.00A 37.95A 6.60Kw 0.67Nm/A 40.55V/Krpm 333Hz 0.08Ohm 1.03mH 176V-V 1.6mkgm213.6kg 16.6kg U730.15.322.00Nm 23.80Nm 1500Rpm 2000Rpm7.50A 8.00A 3.46Kw 3.22Nm/A 194.90V/Krpm 100Hz 2.00Ohm 20.06mH -V 317V 1.9mkgm215.2kg 18.2kg U730.20.322.00Nm 23.00Nm 2000Rpm 2150Rpm 8.50A9.70A 4.61Kw 2.65Nm/A 160.40V/Krpm 133Hz 2.00Ohm 23.20mH -V 345V1.9mkgm215.2kg 18.2kg U730.30.316.90Nm 26.60Nm 3000Rpm 3200Rpm 11.60A 18.90A 5.31Kw 1.52Nm/A 92.00V/Krpm 200Hz 0.38Ohm3.50mH -V 287V1.9mkgm215.2kg 18.2kg U740.05.324.00Nm 42.00Nm 500Rpm 800Rpm 2.50A 5.23A1.26Kw 9.00Nm/A 544.74V/Krpm 33Hz 10.30Ohm 96.50mH -V 314V2.4mkgm218.5kg 21.5kg U740.20.324.00Nm 34.00Nm 2000Rpm 2180Rpm 7.08A 13.48A 5.03Kw 2.72Nm/A 164.63V/Krpm 133Hz 0.80Ohm 8.04mH -V 327V2.4mkgm218.5kg 21.5kg U740.30.321.80Nm33.00Nm3000Rpm3200Rpm14.00A21.70A6.85Kw1.63Nm/A98.66V/Krpm200Hz0.29Ohm3.00mH-V304V2.4mkgm218.5kg21.5kgWe reserve the right to make technical changes.ULTRACT IIIStand-still Weight (without Nominal Inductance Max Nominal Torque power Frequency Constantstill speedtorquebrakephaseWeight (with brakecurrentWinding Stand-Back EMF between Nominal torque Nominal currentNominal speedWinding Resistance Rotor Inertia400VACNominal Voltage (Supply Voltage230VACType Pole Number ⬉ U1002.30.312.40Nm 16.65Nm3000Rpm 8.20A 10.60A 3.90Kw 1.66Nm/A 100V/Krpm 200Hz 1.293Ohm 8.16mH 319V 0.006kgm2832kg 43.0kg U1004.06.328.60Nm 30.70Nm600Rpm 4.30A 4.70A 1.18Kw 7.13Nm/A 432V/Krpm 40Hz 8.410Ohm 85.30mH 370V 0.006kgm2832kg 43.0kg U1004.10.327.00Nm 30.00Nm1000Rpm 6.20A 6.70A 2.86Kw 4.75Nm/A 288V/Krpm 67Hz 3.522Ohm 33.30mH 315V 0.006kgm2832kg 43.0kg U1004.20.326.00Nm 30.00Nm2000Rpm 11.92A 13.60A 5.51Kw 2.37Nm/A 143V/Krpm 133Hz 0.853Ohm8.33mH 304V 0.006kgm2832kg 43.0kg U1004.30.324.00Nm 30.00Nm3000Rpm 15.08A 19.00A 7.64Kw 1.74Nm/A 105V/Krpm 200Hz 0.438Ohm4.48mH 330V 0.006kgm2832kg 43.0kg U1005.15.336.00Nm 40.00Nm1500Rpm 10.00A 13.20A 5.20Kw 3.31Nm/A 200V/Krpm 100Hz 0.960Ohm 14.61mH 300V 0.006kgm2832kg 43.0kg U1005.20.338.92Nm 43.45Nm2000Rpm 16.20A 18.57A 8.15Kw 2.58Nm/A 156V/Krpm 133Hz 0.590Ohm9.02mH 371V 0.006kgm2843kg 54.0kg U1007.10.355.00Nm 60.00Nm1000Rpm 12.41A 13.30A 5.75Kw 4.75Nm/A 288V/Krpm 67Hz 1.239Ohm16.65mH 310V 0.009kgm2843kg 54.0kg U1007.15.337.00Nm 53.00Nm1500Rpm 15.50A 17.20A 5.90Kw 3.37Nm/A 204V/Krpm 100Hz 0.665Ohm 11.37mH 329V 0.009kgm2843kg 54.0kg U1007.20.350.00Nm 60.00Nm2000Rpm 21.27A 24.90A 10.50Kw 2.53Nm/A 153V/Krpm 133Hz 0.356Ohm 4.74mH 321V 0.009kgm2843kg 54.0kg U1007.30.343.00Nm 60.00Nm3000Rpm 28.99A 40.00A 13.36Kw 1.58Nm/A 96V/Krpm 200Hz 0.138Ohm1.85mH 296V 0.009kgm2843kg 54.0kg U1010.10.375.00Nm 87.00Nm1000Rpm 15.50A 17.70A 7.86Kw 5.22Nm/A 316V/Krpm 67Hz 0.835Ohm13.43mH 335V 0.012kgm2855kg 66.0kg U1010.15.375.00Nm 81.00Nm1500Rpm 24.00A 26.80A 12.00Kw 3.30Nm/A 200V/Krpm 100Hz 0.338Ohm 7.38mH 360V 0.012kgm2855kg 66.0kg U1010.20.378.00Nm 85.00Nm2000Rpm 35.14A 37.90A 16.42Kw 2.37Nm/A 143V/Krpm 133Hz 0.181Ohm 2.78mH 301V 0.012kgm2855kg 66.0kg U1010.30.373.00Nm 85.00Nm 3000Rpm40.72A 47.24A 22.79Kw 1.90Nm/A 115V/Krpm 200Hz 0.117Ohm 1.78mH 357V 0.012kgm2855kg 66.0kg U1013.10.388.00Nm 110.00Nm 1000Rpm21.23A 23.00A 10.53Kw 5.07Nm/A 307V/Krpm 67Hz 0.578Ohm 9.47mH 325V 0.015kgm2867kg 78.0kg U1013.15.383.00Nm 98.00Nm 1500Rpm29.90A 35.00A 13.10Kw 3.07Nm/A 186V/Krpm 100Hz 0.216Ohm 4.70mH 294V 0.015kgm2867kg 78.0kg U1013.20.388.00Nm 110.00Nm 2000Rpm37.09A 45.90A 18.33Kw 2.53Nm/A 153V/Krpm 133Hz 0.144Ohm 2.37mH 317V 0.015kgm2867kg 78.0kg U1013.30.367.00Nm 109.00Nm 3000Rpm38.25A 60.70A 21.12Kw 1.90Nm/A 115V/Krpm 200Hz 0.083Ohm 1.33mH 352V 0.015kgm2867kg 78.0kg U1004F10.341.24Nm 42.00Nm 1000Rpm9.07A 9.30A 4.32Kw 4.75Nm/A 288V/Krpm 67Hz 3.778Ohm 33.30mH 335V0.006kgm2839kg 50.0kg U1004F15.338.00Nm 39.00Nm 1500Rpm11.60A 12.00A 6.00Kw 3.32Nm/A 201V/Krpm 100Hz 1.650Ohm 21.71mH 350V 0.006kgm2839kg 50.0kg U1004F17.339.00Nm 40.00Nm 1700Rpm13.80A 14.20A 7.60Kw 2.81Nm/A 170V/Krpm 113Hz 1.200Ohm 15.95mH 339V 0.006kgm2839kg 50.0kg U1004F20.342.78Nm 44.00Nm 2000Rpm18.77A 19.60A 8.96Kw 2.37Nm/A 143V/Krpm 133Hz 0.853Ohm 8.33mH 321V 0.006kgm2839kg 50.0kg U1004F30.342.59Nm 45.00Nm 3000Rpm25.49A 27.30A 13.37Kw 1.74Nm/A 105V/Krpm 200Hz 0.438Ohm 4.48mH 348V 0.006kgm2839kg 50.0kg U1005F15.355.00Nm 60.70Nm 1500Rpm16.60A 20.20A 8.64Kw 3.31Nm/A 200V/Krpm 100Hz 0.960Ohm 14.61mH 300V 0.006kgm2844kg 55.0kg U1005F17.357.00Nm 59.50Nm 1700Rpm20.40A 23.30A 10.15Kw 2.81Nm/A 170V/Krpm 113Hz 0.720Ohm 10.63mH 336V 0.006kgm2844kg 55.0kg U1005F20.358.00Nm 60.70Nm 2000Rpm24.30A 25.70A 12.15Kw 2.60Nm/A 157V/Krpm 133Hz 0.590Ohm 9.02mH 364V 0.006kgm2844kg 55.0kg U1007F10.391.88Nm 92.00Nm 1000Rpm20.10A 20.50A 9.62Kw 4.75Nm/A 288V/Krpm 67Hz 1.239Ohm 16.65mH 332V 0.009kgm2852kg 63.0kg U1007F15.374.00Nm 81.60Nm 1500Rpm23.90A 26.50A 11.60Kw 3.37Nm/A 204V/Krpm 100Hz 0.660Ohm 11.40mH 329V 0.009kgm2852kg 63.0kg U1007F17.380.00Nm 83.00Nm 1700Rpm28.20A 31.80A 14.00Kw 2.85Nm/A 173V/Krpm 113Hz 0.460Ohm 8.09mH 341V 0.009kgm2852kg 63.0kg U1007F20.389.39Nm 92.00Nm 2000Rpm36.67A 38.30A 18.71Kw 2.53Nm/A 153V/Krpm 133Hz 0.356Ohm 4.74mH 341V 0.009kgm2852kg 63.0kg U1007F30.386.45Nm 92.00Nm 3000Rpm56.84A 61.60A 27.14Kw 1.58Nm/A 96V/Krpm 200Hz 0.138Ohm 1.85mH 315V 0.009kgm2852kg 63.0kg U1008F15.3103.00Nm 106.00Nm 1500Rpm33.90A 34.90A 16.00Kw 3.37Nm/A 204V/Krpm 100Hz 0.470Ohm 9.05mH 370V 0.0097kgm2858kg 69.0kg U1008F17.396.00Nm 100.00Nm 1700Rpm35.58A 37.10A 18.00Kw 2.98Nm/A 180V/Krpm 113Hz 0.417Ohm 7.04mH 370V 0.0097kgm2858kg 69.0kg U1008F20.396.00Nm 100.00Nm 2000Rpm40.78A 42.50A 20.00Kw 2.58Nm/A 156V/Krpm 133Hz 0.314Ohm 5.28mH 370V 0.0097kgm2858kg 69.0kg U1010F10.3136.00Nm 142.00Nm 1000Rpm27.80A 28.70A 14.20Kw 5.22Nm/A 316V/Krpm 67Hz 0.835Ohm 13.43mH 362V 0.012kgm2866kg 77.0kg U1010F15.3128.00Nm 130.00Nm 1500Rpm41.00A 42.90A 22.00Kw 3.30Nm/A 200V/Krpm 100Hz 0.330Ohm 7.37mH 360V 0.012kgm2866kg 77.0kg U1010F18.3122.00Nm 126.60Nm 1800Rpm44.00A 48.70A 23.00Kw 2.90Nm/A 176V/Krpm 113Hz 0.270Ohm 5.41mH 321V 0.012kgm2866kg 77.0kg U1010F20.3139.00Nm 139.00Nm 2000Rpm60.53A 61.80A 29.10Kw 2.37Nm/A 143V/Krpm 133Hz 0.181Ohm 2.78mH 321V 0.012kgm2866kg 77.0kg U1010F30.3135.94Nm 138.00Nm 3000Rpm74.05A 76.80A 42.68Kw 1.90Nm/A 115V/Krpm 200Hz 0.117Ohm 1.78mH 380V 0.012kgm2866kg 77.0kg U1013F10.3185.25Nm 185.00Nm 1000Rpm37.91A 38.60A 19.39Kw 5.07Nm/A 307V/Krpm 67Hz 0.578Ohm 9.47mH 350V 0.015kgm2880kg 91.0kg U1013F12.3150.00Nm 185.00Nm 1200Rpm36.40A 47.60A 21.80Kw 4.12Nm/A 249V/Krpm 80Hz 0.381Ohm 6.25mH 335V 0.015kgm2880kg 91.0kg U1013F14.3185.00Nm 189.00Nm1400Rpm 57.00A 58.00A 27.00Kw 3.26Nm/A 197V/Krpm 93Hz 0.225Ohm5.06mH 370V 0.015kgm2880kg 91.0kg Weight 䞡䞣ULTRACT IIIStand-still torque (without Nominal Inductanc e Nominal Torque 乱⥛Frequency 乱乥⥛Constant ⶽ (with brake乱䗳䕀⬉⌕brake ⬉ current ⬉ Back EMF between phase NominaltorqueStand-still power 乱ⶽNominal current 乱⬉⌕Nominal speed 䕀ⶽWinding Resistance ⬉䰏Rotor Inertia 䕀䞣Nominal Voltage 乱⬉ Winding 8.90Type Pole Number ⬉ Weight 䞡䞣ULTRACT IIIStand-still torque (without Nominal Inductanc e Nominal Torque 乱⥛Frequency 乱乥⥛Constant ⶽ (with brake乱䗳䕀⬉⌕brake ⬉ current ⬉ Back EMF between phase Nominaltorque Stand-still power 乱ⶽNominal current 乱⬉⌕Nominal speed 䕀ⶽWinding Resistance ⬉䰏Rotor Inertia 䕀䞣Nominal Voltage 乱⬉ WindingU1013F15.3186.00Nm 190.00Nm 1500Rpm 61.00A 63.80A 29.00Kw 3.26Nm/A 197V/Krpm 100Hz 0.220Ohm 5.05mH 370V 0.015kgm2880kg 91.0kgU1013F17.3164.00Nm 170.00Nm 1700Rpm 56.00A 62.00A 29.00Kw 3.03Nm/A 183V/Krpm 113Hz 0.212Ohm 4.54mH 370V 0.015kgm2880kg 91.0kgU1013F18.3165.00Nm 171.00Nm 1800Rpm 59.60A 65.70A 31.00Kw 2.87Nm/A 174V/Krpm 113Hz 0.187Ohm 4.07mH 370V 0.015kgm2880kg 91.0kgU1013F20.3179.94Nm 185.00Nm 2000Rpm 73.73A 77.30A 37.67Kw 2.53Nm/A 153V/Krpm 133Hz 0.144Ohm 2.37mH 340V 0.015kgm2880kg 91.0kgU1013F30.3171.43Nm 183.00Nm 3000Rpm 93.80A 102.00A 53.83Kw 1.90Nm/A 115V/Krpm 200Hz 0.083Ohm 1.33mH 377V 0.015kgm2880kg 91.0kgU1310.10.393.00Nm 97.00Nm 1000Rpm 18.00A 19.00A 9.72Kw 5.33Nm/A323V/Krpm 67Hz 0.791Ohm 21.56mH 365V 0.022kgm2849kg 60.0kgU1310.20.383.00Nm 95.00Nm 2000Rpm 33.00A 38.00A 17.46Kw 2.67Nm/A 162V/Krpm 133Hz 0.206Ohm 5.39mH 353V 0.022kgm2849kg 60.0kgU1310.30.371.00Nm 95.00Nm 3000Rpm 43.00A 57.00A 22.30Kw 1.78Nm/A 108V/Krpm 200Hz 0.090Ohm 2.40mH 344V 0.022kgm2849kg 60.0kgU1320.10.3178.00Nm 188.00Nm 1000Rpm 36.00A 37.00A 18.66Kw 5.33Nm/A 323V/Krpm 67Hz 0.306Ohm 10.78mH 360V 0.036kgm2878kg 89.0kgU1320.20.3158.00Nm 190.00Nm 2000Rpm 71.00A 85.00A 33.05Kw 2.37Nm/A 143V/Krpm 133Hz 0.059Ohm 2.13mH 310V 0.036kgm2878kg 89.0kgU1320.30.3117.00Nm 189.00Nm 3000Rpm 71.00A 113.00A 36.85Kw 1.78Nm/A 108V/Krpm 200Hz 0.034Ohm 1.20mH 337V 0.036kgm2878kg 89.0kgU1330.10.3258.00Nm 275.00Nm 1000Rpm 51.00A 54.00A 26.96Kw 5.33Nm/A 323V/Krpm 67Hz 0.182Ohm 7.19mH 356V 0.049kgm28106kg 117.0kgU1330.20.3218.00Nm 275.00Nm 2000Rpm 88.00A 109.00A 45.74Kw 2.67Nm/A 162V/Krpm 133Hz 0.046Ohm 1.80mH 345V 0.049kgm28106kg 117.0kgU1330.30.3141.00Nm 273.00Nm 3000Rpm 86.00A 163.00A 44.21Kw 1.78Nm/A 108V/Krpm 200Hz 0.020Ohm 0.80mH 332V 0.049kgm28106kg 117.0kgU1340.10.3330.00Nm 354.00Nm 1000Rpm 59.00A 63.00A 34.54Kw 5.93Nm/A 359V/Krpm 67Hz 0.162Ohm 6.66mH 393V 0.063kgm28135kg 146.0kgU1340.20.3273.00Nm 354.00Nm 2000Rpm 123.00A 158.00A 57.11Kw 2.37Nm/A 143V/Krpm 133Hz 0.026Ohm 1.06mH 304V 0.063kgm28135kg 146.0kgU1340.30.3153.00Nm 357.00Nm 3000Rpm 94.00A 213.00A 48.16Kw 1.78Nm/A 108V/Krpm 200Hz 0.014Ohm 0.60mH 329V 0.063kgm28135kg 146.0kgU1310F10.3133.00Nm 135.00Nm 1000Rpm 26.00A 27.00A 13.93Kw 5.33Nm/A 323V/Krpm 67Hz 0.791Ohm 21.56mH 398V 0.022kgm2864kg 75.0kgU1310F20.3126.00Nm 132.00Nm 2000Rpm 50.00A 53.00A 26.39Kw 2.67Nm/A 162V/Krpm 133Hz 0.206Ohm 5.39mH 385V 0.022kgm2864kg 75.0kgU1310F30.3120.00Nm 133.00Nm 3000Rpm 72.00A 79.00A 37.70Kw 1.78Nm/A 108V/Krpm 200Hz 0.090Ohm 2.40mH 378V 0.022kgm2864kg 75.0kgU1320F10.3276.00Nm 282.00Nm 1000Rpm 55.00A 56.00A 28.90Kw 5.33Nm/A 323V/Krpm 67Hz 0.294Ohm 10.78mH 399V 0.036kgm2897kg 108.0kgU1320F15.3210.00Nm 210.00Nm 1500Rpm 62.00A 62.00A 33.00Kw 3.43Nm/A 208V/Krpm 100Hz 0.098Ohm 4.46mH 369V 0.036kgm2897kg 108.0kgU1320F17.3229.00Nm 236.00Nm 1700Rpm 92.60A 98.30A 39.40Kw 2.94Nm/A 178V/Krpm 113Hz 0.107Ohm 4.50mH 377V 0.036kgm2897kg 108.0kgU1320F18.3232.00Nm 240.00Nm 1800Rpm 96.46A 99.80A 44.00Kw 2.64Nm/A 160V/Krpm 113Hz 0.085Ohm 3.65mH 379V 0.036kgm2897kg 108.0kgU1320F20.3269.00Nm 286.00Nm 2000Rpm 121.00A 128.00A 56.34Kw 2.37Nm/A 143V/Krpm 133Hz 0.056Ohm 2.13mH 347V 0.036kgm2897kg 108.0kgU1320F30.3245.00Nm 280.00Nm 3000Rpm 147.00A 167.00A 76.96Kw 1.78Nm/A 108V/Krpm 200Hz 0.033Ohm 1.20mH 379V 0.036kgm2897kg 108.0kgU1330F10.3408.00Nm 417.00Nm 1000Rpm 81.00A 83.00A 42.72Kw 5.33Nm/A 323V/Krpm 67Hz 0.182Ohm 7.19mH 396V 0.049kgm28128kg 139.0kgU1330F15.3380.00Nm 416.00Nm 1500Rpm 106.00A 117.00A 60.00Kw 3.56Nm/A 215V/Krpm 100Hz 0.082Ohm 3.19mH 380V 0.049kgm28128kg 139.0kgU1330F17.3349.00Nm 363.00Nm 1700Rpm 145.00A 153.00A 62.00Kw 2.89Nm/A 175V/Krpm 113Hz 0.060Ohm 2.90mH 368V 0.049kgm28128kg 139.0kgU1330F18.3357.00Nm 370.00Nm 1800Rpm 146.51A 151.80A 67.00Kw 2.68Nm/A 162V/Krpm 113Hz 0.050Ohm 2.46mH 379V 0.049kgm28128kg 139.0kgU1330F20.3389.00Nm 417.00Nm 2000Rpm 155.00A 166.00A 81.47Kw 2.67Nm/A 162V/Krpm 133Hz 0.046Ohm 1.80mH 386V 0.049kgm28128kg 139.0kgU1330F30.3357.00Nm 415.00Nm 3000Rpm 215.00A 247.00A 112.15Kw 1.78Nm/A 108V/Krpm 200Hz 0.020Ohm 0.80mH 376V 0.049kgm28128kg 139.0kgU1340F10.3538.00Nm 550.00Nm 1000Rpm 96.00A 98.00A 56.34Kw 5.93Nm/A 359V/Krpm 67Hz 0.162Ohm 6.66mH 438V 0.063kgm28160kg 171.0kgU1340F15.3450.00Nm 530.00Nm 1500Rpm 130.00A 158.00A 70.00Kw 3.56Nm/A 215V/Krpm 100Hz 0.058Ohm 2.40mH 347V 0.063kgm28160kg 171.0kgU1340F17.3454.00Nm 469.00Nm 1700Rpm 195.00A 201.00A 80.00Kw 2.41Nm/A 146V/Krpm 113Hz 0.031Ohm 1.47mH 369V 0.063kgm28160kg 171.0kgU1340F18.3481.00Nm 499.00Nm 1800Rpm 195.98A 203.30A 91.00Kw 2.71Nm/A 164V/Krpm 113Hz 0.035Ohm 1.86mH 379V 0.063kgm28160kg 171.0kgU1340F20.3511.00Nm 550.00Nm 2000Rpm 230.00A 246.00A 107.02Kw 2.37Nm/A 143V/Krpm 133Hz 0.026Ohm 1.06mH 341V 0.063kgm28160kg 171.0kgU1340F30.3473.00Nm 555.00Nm 3000Rpm 284.00A 330.00A 148.59Kw 1.78Nm/A 108V/Krpm 200Hz 0.014Ohm 0.60mH 375V 0.063kgm28160kg 171.0kgU1350F04.3602.68Nm 607.79Nm 418Rpm 56.42A 62.68A 26.40Kw 11.18Nm/A 677V/Krpm 27Hz 0.464Ohm 22.77mH 370V 0.089kgm28240kg 251.0kgU1350F06.3680.00Nm 680.00Nm 592Rpm 116.00A 129.00A 42.70Kw 5.88Nm/A 356V/Krpm 40Hz 0.153Ohm 9.05mH 380V 0.089kgm28240kg 258.0kgU1350F10.3596.00Nm 605.00Nm1000Rpm 167.78A 171.78A 64.00Kw 4.36Nm/A 264V/Krpm 67Hz 0.078Ohm 4.18mH 370V 0.089kgm28240kg 251.0kg We reserve the right to make technical changes.。