360度舵机控制角度的pwm值
- 格式:docx
- 大小:15.02 KB
- 文档页数:3
目录一.舵机PWM信号介绍 (1)1.PWM信号的定义 (1)2.PWM信号控制精度制定 (2)二.单舵机拖动及调速算法 (3)1.舵机为随动机构 (3)(1)HG14-M舵机的位置控制方法 (3)(2)HG14-M舵机的运动协议 (4)2.目标规划系统的特征 (5)(1)舵机的追随特性 (5)(2)舵机ω值测定 (6)(3)舵机ω值计算 (6)(4)采用双摆试验验证 (6)3.DA V的定义 (7)4.DIV的定义 (7)5.单舵机调速算法 (8)(1)舵机转动时的极限下降沿PWM脉宽 (8)三.8舵机联动单周期PWM指令算法 (10)1.控制要求 (10)2.注意事项 (10)3.8路PWM信号发生算法解析 (11)4.N排序子程序RAM的制定 (12)5.N差子程序解析 (13)6.关于扫尾问题 (14)(1)提出扫尾的概念 (14)(2)扫尾值的计算 (14)一.舵机PWM信号介绍1.PWM信号的定义PWM信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。
具体的时间宽窄协议参考下列讲述。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
目前,北京汉库的HG14-M舵机可能是这个过渡时期的产物,它采用传统的PWM协议,优缺点一目了然。
优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM格式。
但是它是一款数字型的舵机,其对PWM信号的要求较低:(1)不用随时接收指令,减少CPU的疲劳程度;(2)可以位置自锁、位置跟踪,这方面超越了普通的步进电机;图1-1其PWM格式注意的几个要点:(1)上升沿最少为0.5mS,为0.5mS---2.5mS之间;(2)HG14-M数字舵机下降沿时间没要求,目前采用0.5Ms就行;也就是说PWM波形可以是一个周期1mS的标准方波;(3)HG0680为塑料齿轮模拟舵机,其要求连续供给PWM信号;它也可以输入一个周期为1mS的标准方波,这时表现出来的跟随性能很好、很紧密。
270度舵机计算PWM值的公式1.引言1.1背景270度舵机是一种常用的输出设备,广泛应用于机器人、遥控车、航模等领域。
控制舵机的角度需要通过P WM(脉宽调制)信号来实现。
本文将介绍如何根据舵机的工作电压、频率和期望角度,计算出相应的PW M值。
1.2目标本文的目标是提供一个简单而准确的公式,根据给定的参数,计算出控制270度舵机的PW M值。
2.控制角度与P W M值2.1脉宽调制(P W M)P W M是一种控制输出信号的方式,通过控制信号的占空比(高电平时间与一个周期的比值),可以实现对输出设备的精确控制。
在控制舵机时,通过调整PW M信号的占空比来控制舵机的角度。
2.2舵机的工作范围270度舵机的工作范围为0度到270度。
舵机在0度时为最左位置,270度时为最右位置。
控制舵机的P W M值需要根据所需的角度进行计算。
3.公式推导根据舵机的工作范围和P WM信号的脉宽周期,可以推导出计算P WM值的公式。
3.1舵机工作范围和P W M周期假设舵机的工作范围为0度到270度,PW M信号的周期为T。
3.2占空比与舵机角度的关系舵机的角度与PW M信号的占空比存在一定的线性关系,可以表示为:占空比=(期望角度/最大角度)*1003.3P W M值与占空比的关系P W M值与占空比存在一定的线性关系,可以表示为:P W M值=(占空比/100)*T综上所述,根据舵机的工作范围和PW M信号的周期,可以通过以上公式计算出对应舵机角度所需的PW M值。
4.示例计算4.1参数设定假设舵机的工作范围为0度到270度,PW M信号的周期为20m s。
4.2计算如果期望舵机角度为180度,根据公式可以计算得到占空比为66.67%,即:占空比=(180/270)*100=66.67%根据占空比和PW M周期计算PW M值,即:P W M值=(66.67/100)*20ms=13.33ms所以在期望舵机角度为180度时,应该给舵机的PW M信号设定脉宽为13.33m s。
PWM方式控制遥控舵机和直流电机
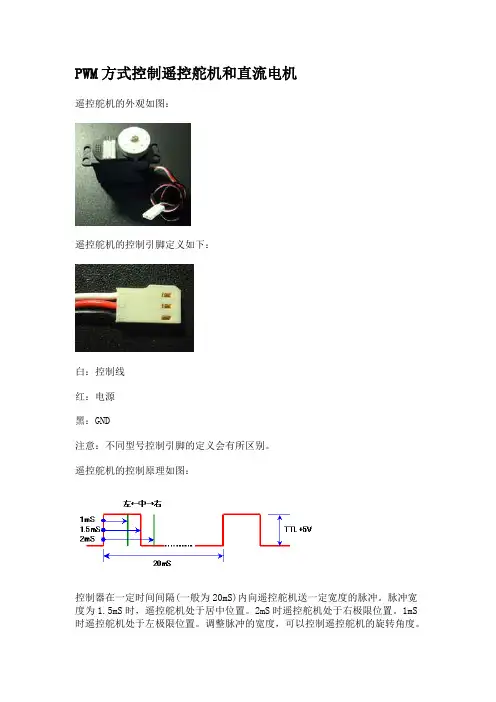
遥控舵机的外观如图:
遥控舵机的控制引脚定义如下:
白:控制线
红:电源
黑:GND
注意:不同型号控制引脚的定义会有所区别。
遥控舵机的控制原理如图:
控制器在一定时间间隔(一般为20mS)内向遥控舵机送一定宽度的脉冲。
脉冲宽度为1.5mS时,遥控舵机处于居中位置。
2mS时遥控舵机处于右极限位置。
1mS 时遥控舵机处于左极限位置。
调整脉冲的宽度,可以控制遥控舵机的旋转角度。
H8/3069的工作原理
GRA和GRB是H8/3069内部的时间常数寄存器。
本例使用H8/3069F的16bit定时器0,工作于PWM模式。
遥控舵机与Kane BeBe的连接:
范例程序请参考pwm.c
直流电机是非常常见的执行元件
PWM方式控制直流电机的速度能大幅度降低功耗。
控制原理与遥控舵机一样。
TIOCA输出的占空比越大,电机的转速就越高。
电路图如下:
图中的R1是为了防止MOSFET的误动作。
H8/3069F有3个16位定时器/计数器,4个8位定时器/计数器。
都可以独立配置成PWM工作模式。
舵机的pwm控制芯片章节一:引言(约200字)在自动控制领域,舵机是一种常见且广泛使用的装置。
它可以通过接收到的脉冲宽度调制信号(PWM信号),精确地控制舵机的角度和位置。
舵机的PWM控制是通过使用专门设计的芯片来实现的。
本文将重点介绍舵机的PWM控制芯片及其原理,以及在各种应用中的优势和限制。
章节二:舵机PWM控制芯片的原理(约300字)舵机PWM控制芯片通过接收输入信号,并根据其脉冲宽度进行相应的控制。
在舵机PWM控制芯片中,输入信号的频率通常为50 Hz,具有一个周期为20 ms。
每个周期内包含一个控制信号脉冲,该脉冲的宽度在0.5 ms至2.5 ms之间变化。
当脉冲宽度为0.5 ms时,舵机转到最左边;当脉冲宽度为2.5 ms时,舵机转到最右边。
脉冲宽度在0.5 ms至2.5 ms之间的任何值都会导致舵机在中间位置之间旋转。
舵机PWM控制芯片通常包含一个定时器/计数器,用于测量输入信号的脉冲宽度。
当舵机PWM控制芯片接收到输入信号时,它会比较计数器的值与脉冲宽度,然后根据比较结果生成相应的控制信号,以驱动舵机达到所需的角度。
章节三:舵机PWM控制芯片的应用(约300字)舵机PWM控制芯片具有广泛的应用领域。
例如,在机器人技术中,舵机能够精确地控制机器人的关节位置,使其能够执行复杂的动作。
此外,舵机还常用于航空模型、遥控车辆、摄像机云台等应用中,以实现精确的角度控制。
使用舵机PWM控制芯片的优势在于其精确度和可靠性。
这些芯片通常具有高精度的定时器和计数器,能够准确地测量脉冲宽度,并根据测量结果生成相应的控制信号。
此外,舵机PWM控制芯片还具有较高的稳定性和抗干扰能力,可以在复杂的环境中正常工作。
然而,舵机PWM控制芯片也存在一些限制。
例如,由于舵机PWM控制芯片只能控制舵机的位置,无法提供反馈信息,因此在需要精确位置控制的应用中可能不够理想。
此外,舵机PWM控制芯片的成本相对较高,因此在低成本应用中可能会面临竞争不利。
舵机任意脉宽计算
舵机转动的角度与脉宽在0.5ms\~2.5ms的区间内呈线性关系。
具体来说,脉宽为0.5ms时,舵机转动0度;脉宽为1.0ms时,舵机转动约45度;脉宽为1.5ms时,舵机转动90度;脉宽为2.0ms时,舵机转动约135度;脉宽为2.5ms时,舵机转动到最大角度,约180度。
此外,脉宽和舵机转动角度的比例关系可以通过公式C/(180-0) = HL/(2.5-0.5) 来表示,其中C代表角度,H代表高电平时间(即脉宽),L为有效部分脉冲长度比例。
通过该公式,可以计算出任意脉宽对应的舵机转动角度。
另外,对于具体的编程实现,可以通过将角度值转换为对应的脉宽值来控制舵机的转动。
例如,使用Python编程时,可以通过如下公式将角度值转换为脉宽值:
pulse_width = ((angle * 11) + 500) / 1000
其中,angle为输入的角度值(0\~180),pulse_width为高电平占空时间(即脉宽,单位为ms)。
请注意,以上信息仅供参考,实际应用中可能需要根据具体的舵机型
号和控制方式进行适当调整。
pwm舵机控制第一章:引言随着自动化技术的不断发展,舵机成为机器人、无人机、智能家居等领域中重要的执行器之一。
舵机控制的准确性和稳定性对于这些应用来说至关重要。
PWM(脉宽调制)技术已被广泛应用于舵机控制中,它通过控制舵机电源的脉冲宽度来实现舵机的位置控制。
本论文将重点研究PWM舵机控制方法,并进行相关性能分析和实验验证。
第二章:PWM舵机控制原理2.1 PWM技术概述脉宽调制技术是一种通过改变控制信号的脉冲宽度来控制设备的平均功率输出的方法。
在舵机控制中,PWM技术被用于控制电源脉冲信号的宽度,进而控制舵机的角度或位置。
通常,PWM信号的高电平代表一个角度,而低电平则代表另一个角度。
2.2 PWM舵机控制原理PWM舵机控制分为两个阶段:位置检测和角度控制。
在位置检测阶段,舵机读取输入信号的脉宽,通过内部电路将其转化为相应的角度。
而在角度控制阶段,PWM信号控制舵机的转动。
具体来说,当PWM信号的脉冲宽度大于一个阈值时,舵机向一个方向转动;当脉冲宽度小于该阈值时,舵机向另一个方向转动。
第三章:PWM舵机控制方法3.1 基于PID控制算法的PWM舵机控制PID控制算法是一种常用的控制算法,可以根据目标值与实际值的误差来调整控制信号,进而实现对舵机位置的控制。
在PWM舵机控制中,可以使用PID控制算法来计算控制信号的脉冲宽度,使舵机保持在目标角度附近。
3.2 基于反馈机制的PWM舵机控制在PWM舵机控制中,可以通过添加反馈机制来提高舵机的姿态控制精度。
反馈机制可以通过使用角度传感器或加速度传感器等设备来获取舵机的实际位置信息,并将其与目标位置进行比较。
通过不断调整控制信号的脉冲宽度,可以使舵机快速准确地达到目标姿态。
第四章:实验与结果分析本章将进行一系列实验来验证PWM舵机控制方法的性能。
实验中将计算不同PWM信号脉冲宽度对舵机位置和角度的影响,并进行比较分析。
通过实验结果的对比和分析,可以评估不同的舵机控制方法的优缺点,为实际应用提供指导。
计算机控制实验报告题目:舵机的角度控制院(系):电子工程与自动化学院专业:智能科学与技术学生姓名:学号:指导教师:赵学军2016年7月02日一、实验题目舵机的角度控制二、实验内容在PROTEUS软件下用MOTOR-PWMSERVO作为控制对象,单片机发送PWM信号给舵机实现转角控制,4*4键盘给定,参数LCD显示;三、实验要求1、根据给定题目设计Proteus仿真原理图;2、根据给定题目设计有关的C语言源程序,并编译成可执行文件;3、在Proteus仿真界面下运行程序实现给定的功能四、实验设计(一)实验思路1.14*4矩阵键盘概述1.2舵机的基本概述舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置;五、具体设计思路例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。
用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。
五、心得体会本次实验中,通过实际动手自己设计并实现在PROTEUS软件下用MOTOR-PWMSERVO作为控制对象,单片机发送PWM信号给舵机实现转角控制,4*4键盘给定,参数LCD显示,不仅加深了我对计算机控制课程理论知识的理解,同时也进一步认识到了计算机的广泛应用。
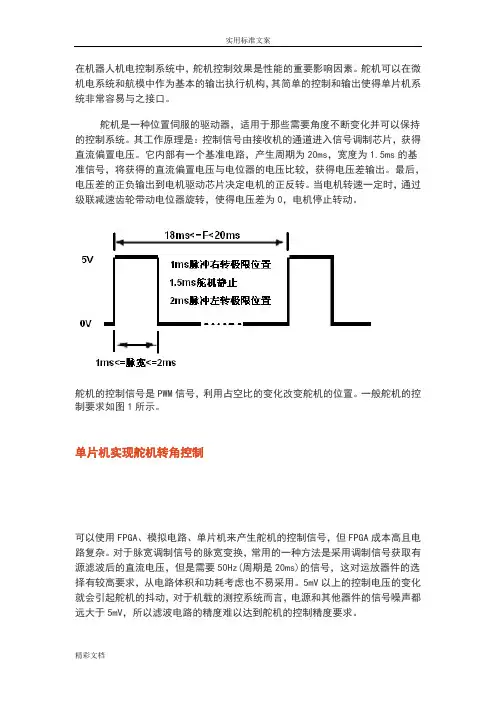
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
一般舵机的控制要求如图1所示。
单片机实现舵机转角控制可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。
对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。
5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。
单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。
舵机控制pwm第一章:引言(200字左右)舵机是一种常见的电子设备,它被广泛应用于工业自动化、机器人技术、航空航天等领域。
舵机的核心是PWM(脉宽调制)信号控制技术,通过调节PWM信号的占空比来控制舵机的角度位置。
本论文将重点介绍舵机控制中的PWM信号生成原理和控制算法,并深入分析其应用领域和优势。
第二章:PWM信号生成原理(300字左右)PWM信号是指固定频率和变化占空比的方波信号,它的占空比决定了舵机的角度位置。
PWM信号的生成基于定时器的工作原理,通过不断计数和比较产生特定占空比的脉冲信号。
定时器的计数周期固定,根据所设定的比较值来确定高电平的持续时间,从而控制舵机的旋转角度。
Pulse Width Modulation技术的优势在于能够精确控制舵机位置,并具有速度快、响应高、功耗低等特点。
第三章:舵机控制算法(300字左右)舵机控制算法主要分为位置控制和速度控制两种。
位置控制通过设定目标位置和当前位置的误差,利用PID(比例、积分、微分)控制算法来调节PWM信号的占空比,使舵机迅速达到目标位置并保持稳定。
速度控制则通过设定目标速度和当前速度之间的误差,根据系统的动态特性利用传统PID或者自适应控制算法来调节PWM信号的占空比,实现舵机的平滑运动。
这些控制算法需要根据具体应用需求进行优化和调整,以达到最佳控制效果。
第四章:舵机控制应用与未来发展方向(200字左右)舵机控制技术广泛应用于机器人、工业自动化、航空航天等领域。
在机器人领域,舵机可用于机器人臂、腿部关节的控制,实现多自由度的运动。
在工业自动化应用中,舵机可用于控制机械臂的旋转和伸缩操作。
航空航天领域也常用舵机来控制飞行器的舵和尾翼等部件。
未来,随着自动化技术的不断发展,舵机控制将更加智能化和精确化,并可能融合更多新的技术,如人工智能、机器学习等,进一步拓展舵机在各个领域的应用范围。
第四章:舵机控制应用与未来发展方向(续)(1000字左右)4.1 机器人应用舵机在机器人领域有着广泛的应用,机器人的各个关节可以通过舵机控制实现灵活的运动。

270度舵机计算pwm值的公式摘要:I.270度舵机的工作原理A.舵机的组成部分B.舵机的工作流程II.PWM的概念A.PWM的定义B.PWM在舵机中的应用III.计算270度舵机PWM值的公式A.公式推导B.公式说明正文:I.270度舵机的工作原理舵机是一种常用于遥控模型、机器人和自动化领域的精密控制执行器。
它主要由以下几个部分组成:马达、减速器、舵盘和位置传感器。
舵机的工作流程如下:1.接收器接收来自遥控器的信号,这些信号通常是PWM信号。
2.舵机内部的微控制器解析PWM信号,计算出舵机的旋转角度和旋转速度。
3.舵机马达根据计算结果旋转,驱动减速器将马达的旋转速度降低。
4.减速器的输出轴通过舵盘驱动舵机的机械部分旋转。
5.位置传感器检测舵机的实时位置,将数据发送回微控制器进行比较和调整。
II.PWM的概念PWM是一种模拟控制技术,通过改变脉冲的宽度来控制电机或设备的转速和功率。
在舵机中,PWM信号用于控制舵机的旋转角度和速度。
A.PWM的定义:脉冲宽度调制是一种模拟控制技术,通过改变脉冲的宽度来调整信号的占空比,从而实现对电机或设备的控制。
B.PWM在舵机中的应用:舵机接收到遥控器发送的PWM信号后,内部的微控制器会根据信号的占空比计算出舵机的旋转角度和速度。
III.计算270度舵机PWM值的公式假设舵机的最大旋转角度为270度,分辨率(步数)为2048步。
我们可以使用以下公式计算PWM值:PWM值= (旋转角度/ 分辨率) × 1000 + 500将270度代入公式中,得到:PWM值= (270 / 2048) × 1000 + 500 ≈ 1337.5A.公式推导:根据舵机的分辨率,我们可以计算出每个步对应的旋转角度。
将目标旋转角度除以总步数,得到每个步对应的旋转角度。
然后将该值乘以1000,再加上500(舵机的中间值,通常为50%的占空比),得到PWM 值。
B.公式说明:该公式适用于270度舵机,可以根据舵机的分辨率计算出对应的PWM值。
舵机PWM原理:舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度伺服为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms----------45度;1.5ms------------90度;2.0ms--------135度;2.5ms-----------180度。
控制占空比:产生周期20 ms的脉冲信号,根据需要,改变输出脉宽。
基本思路我用的晶振频率为12M,2051一个时钟周期为12个晶振周期,正好是1/1000 ms,计数器每隔1/1000 ms计一次数。
以计数器1为例,先设定脉宽的初始值,程序中初始为1.5ms,在for循环中可以随时通过改变a值来改变,然后设定计数器计数初始值为a,并置输出p13为高位。
当计数结束时,触发计数器溢出中断函数,就是void timer0(void) interrupt 1 using1 ,在子函数中,改变输出p13为反相(此时跳为低位),在用20000(代表20ms周期)减去高位用的时间a,就是本周期中低位的时间,c=20000-a,并设定此时的计数器初值为c,直到定时器再次产生溢出中断,重复上一过程。
舵机测试数据整理周期20.00ms定时器初值角度a值占空比20460 -45 1895 9.26220460 -40 1880 9.18920460 -35 1865 9.11520460 -30 1850 9.04220460 -25 1835 8.96920460 -20 1820 8.89520460 -15 1805 8.82220460 -10 1790 8.74920460 -5 1775 8.67520460 0 1760 8.60220460 5 1745 8.52920460 10 1730 8.45620460 15 1715 8.38220460 20 1700 8.30920460 25 1685 8.23620460 30 1670 8.16220460 35 1655 8.08920460 40 1640 8.01620460 45 1625 7.942角度是从-45度到+45度之间19个数值。
pwm驱动舵机原理小伙伴!今天咱们来唠唠PWM驱动舵机这个超有趣的事儿。
你看啊,舵机这小玩意儿可神奇了。
就像一个小小的机械手臂,能按照我们的想法转到不同的角度。
那PWM是怎么来指挥它的呢?咱先得知道啥是PWM。
PWM全称是脉冲宽度调制(Pulse - Width Modulation)。
你可以把它想象成一个超级有节奏感的小鼓手。
这个小鼓手敲鼓不是乱敲的,而是有着特定的节奏。
在PWM里呢,有高电平和低电平,就像鼓槌抬起(高电平)和落下(低电平)。
这个高电平和低电平交替出现,就形成了一个个脉冲。
那这个脉冲的宽度就很关键啦。
对于舵机来说,它就像是舵机的秘密指令。
舵机内部有个小电机,还有一套精巧的传动装置。
当PWM信号给到舵机的时候,舵机就开始解读这个脉冲宽度的信息。
比如说,一个比较窄的脉冲宽度,舵机就会想:“这个信号告诉我要转到一个比较小的角度呢。
”然后它就会驱动小电机,通过传动装置,慢慢地把舵机的轴转到对应的角度。
就好像你跟小伙伴悄悄说一个小秘密,小伙伴就按照这个秘密去做一件小事儿一样。
要是脉冲宽度变宽了呢?舵机就会觉得:“哟呵,这是要我转到更大的角度啦。
”然后就欢快地把轴转到更大的角度去。
舵机里面其实还有个小芯片,这个芯片就像是舵机的小脑袋。
它一直在等着PWM 信号这个小信使带来的消息。
当收到PWM信号后,它会根据脉冲宽度计算出应该让电机转多少,精确得很呢。
而且啊,舵机的角度控制范围是有限的,就像我们人活动手臂,也只能在一定的范围内嘛。
一般的舵机可能是0度到180度左右。
PWM信号就在这个范围内指挥舵机转来转去。
你再想象一下,PWM信号就像一个魔法棒,每一次脉冲宽度的变化就是魔法棒挥舞的不同方式。
舵机呢,就是那个听话的小精灵,按照魔法棒的指示做出各种可爱的动作。
有时候,要是PWM信号出了点小问题,比如说脉冲宽度乱了,那舵机可就懵圈了。
就像你给小伙伴传达一个错误的指令,小伙伴肯定会做出一些奇怪的事情。
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
一般舵机的控制要求如图1所示。
单片机实现舵机转角控制可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。
对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。
5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。
单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。
270度舵机计算pwm值的公式摘要:1.舵机的基本概念和作用2.PWM 信号与舵机的关系3.270 度舵机计算PWM 值的公式4.实例解析5.总结正文:一、舵机的基本概念和作用舵机,又称伺服电机,是一种能将电脉冲转换为角位移或线位移的精密控制执行器。
它在机器人、自动化设备、遥控模型等领域中具有广泛的应用。
舵机的主要作用是实现对角度、位置的精确控制。
二、PWM 信号与舵机的关系脉冲宽度调制(PWM)信号是一种模拟控制信号,通过改变脉冲的宽度来调节电机的速度和转向。
在舵机控制中,PWM 信号是驱动舵机转动的核心信号。
舵机接收到不同占空比的PWM 信号后,会产生不同程度的转动。
三、270 度舵机计算PWM 值的公式对于270 度舵机,其计算PWM 值的公式为:PWM 值= (角度/ 舵机总角度) × (最大PWM 值- 最小PWM 值) + 最小PWM 值其中,角度为需要转动的角度,舵机总角度为舵机能够转动的总角度(一般为360 度或270 度),最大PWM 值为舵机接收到的最高占空比PWM 信号,最小PWM 值为舵机接收到的最低占空比PWM 信号。
四、实例解析假设有一个270 度舵机,需要将其转动90 度。
首先,计算转动角度占总角度的比例:90 / 270 = 1 / 3然后,计算PWM 值的范围:最大PWM 值= 1 × (1 - 0) + 0 = 1最小PWM 值= 0接下来,代入公式计算需要的PWM 值:PWM 值= (1 / 3) × (1 - 0) + 0 = 1 / 3因此,将舵机转动90 度所需的PWM 值为1/3。
五、总结本文介绍了270 度舵机计算PWM 值的公式,通过计算角度占总角度的比例以及代入公式,可以得到舵机所需的PWM 值。
舵机的分类按照舵机的转动角度分有180度舵机和360度舵机。
180度舵机只能在0度到180度之间运动,超过这个范围,舵机就会出现超量程的故障,轻则齿轮打坏,重则烧坏舵机电路或者舵机里面的电机。
360度舵机转动的方式和普通的电机类似,可以连续的转动,不过我们可以控制它转动的方向和速度。
按照舵机的信号处理分为模拟舵机和数字舵机,它们的区别在于,模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置。
关于PWM信号在3.4节将会介绍。
3.2 舵机的内部结构一般来说,我们用的舵机有以下几个部分组成:直流电动机、减速器(减速齿轮组)、位置反馈电位计、控制电路板(比较器)。
舵机的输入线共有三根,红色在中间,为电源正极线,黑色线是电源负极(地线)线,黄色或者白色线为信号线。
其中电源线为舵机提供6V到7V左右电压的电源。
3.3 舵机的工作原理在舵机上电后,舵机的控制电路会记录由位置反馈电位计反馈的当前位置,当信号线接收到PWM信号时会比较当前位置和此PWM信号控制所要转到得位置,如果相同舵机不转,如果不同,控制芯片会比较出两者的差值,这个差值决定转动的方向和角度。
3.4 舵机的控制协议对舵机转动的控制是通过PWM信号控制的。
PWM是脉宽调制信号的英文缩写,其特点在于它的上升沿与下降沿的时间宽度或者上升沿占整个周期的比例(占空比)。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
本书介绍的舵机控制协议是北京汉库公司出品的舵机所采用的协议 ,市场上一些其他厂商(包括有些日本厂商)生产的舵机也采用这种协议。
如果你采用的是其它厂商的舵机,最好先参考下他们的DATA手册或者产品说明之类的技术文档。
前面说过舵机分180度和360度,它们的应用场合不一样,工作方式不一样,自然控制的协议也不一样。
360度舵机控制角度的pwm值
摘要:
I.引言
- 介绍360 度舵机
- 说明舵机控制角度的pwm 值的重要性
II.360 度舵机的工作原理
- 解释舵机的工作原理
- 介绍舵机的组成部分
III.舵机控制角度的pwm 值
- 详述pwm 值对舵机控制角度的影响
- 解释pwm 值与舵机旋转速度的关系
IV.如何设置舵机的pwm 值
- 介绍设置pwm 值的步骤
- 给出具体的设置方法
V.舵机控制角度的实际应用
- 说明舵机控制角度在实际应用中的重要性
- 举例说明舵机控制角度的应用场景
VI.结论
- 总结舵机控制角度的pwm 值的重要性
- 强调在实际应用中合理设置pwm 值的意义
正文:
I.引言
360 度舵机是一种可以实现360 度旋转的机械设备,广泛应用于各种领域,如机器人、无人机等。
舵机控制角度的pwm 值是影响舵机旋转速度和角度的关键因素。
本文将详细介绍360 度舵机控制角度的pwm 值以及如何设置pwm 值。
II.360 度舵机的工作原理
舵机(Servo)是一种精密控制的马达,由马达、减速器、控制器和位置传感器组成。
舵机通过接收来自控制器的信号,调整马达的转速和旋转角度,从而实现对设备的控制。
舵机的工作原理是:控制器发送pwm 信号给舵机,舵机根据接收到的pwm 信号调整马达的转速和旋转角度。
III.舵机控制角度的pwm 值
舵机控制角度的pwm 值是指控制器发送给舵机的脉冲宽度调制信号。
pwm 信号的宽度不同,舵机接收到的指令也不同,从而实现对舵机旋转角度的控制。
一般来说,pwm 信号的宽度与舵机旋转角度呈线性关系。
例如,舵机在接收1ms 的pwm 信号时,旋转角度为0 度;接收2ms 的pwm 信号时,旋转角度为180 度。
因此,通过调整pwm 信号的宽度,可以实现对舵机旋转角度的控制。
IV.如何设置舵机的pwm 值
设置舵机的pwm 值需要以下步骤:
1.了解舵机的pwm 范围:不同的舵机型号有不同的pwm 范围。
通常,舵机的pwm 范围为0-255。
2.计算目标角度的pwm 值:根据舵机的pwm 范围和旋转角度的线性关
系,可以计算出目标角度的pwm 值。
例如,如果要控制舵机旋转90 度,根据线性关系,可以计算出需要的pwm 值为150。
3.设置舵机的pwm 值:将计算出的目标pwm 值发送给舵机,舵机将根据接收到的pwm 值调整旋转角度。
V.舵机控制角度的实际应用
舵机控制角度的pwm 值在实际应用中具有重要意义。
例如,在机器人领域,舵机的精确控制可以实现机器人的精确运动;在无人机领域,舵机的控制可以实现无人机的稳定飞行。
合理设置舵机的pwm 值,可以提高设备的控制精度和稳定性。
VI.结论
本文详细介绍了360 度舵机控制角度的pwm 值以及如何设置pwm 值。
通过了解舵机的工作原理和pwm 值与旋转角度的关系,可以更好地掌握舵机的控制方法。