工业机器人项目一 工业机器人装配工作站现场编程
- 格式:pptx
- 大小:1.54 MB
- 文档页数:10
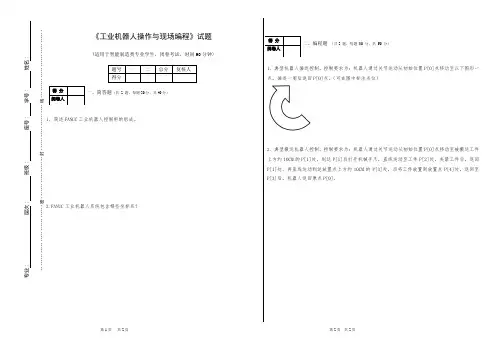
第1页 共2页 第2页 共2页专业: 层次: 班级: 座号: 学号: 姓名:······························密···················封·····················线·······························《工业机器人操作与现场编程》试题(适用于智能制造类专业学生,闭卷考试,时间90分钟)题号 一 二 总分 复核人得分1、简述FANUC 工业机器人控制柜的组成。
2.FANUC 工业机器人系统包含哪些坐标系?1、典型机器人循迹控制,控制要求为:机器人通过关节运动从初始位置P[0]点移动至以下图形一点,循迹一周后返回P[0]点。
(可在图中标注点位)2、典型搬运机器人控制。
2.工业机器人装配电机工作站程序设计实训报告1.引言1.1 概述概述工业机器人是在工业生产中广泛应用的自动化设备之一。
它具备高效、精确和可持续工作的能力,可以完成人们繁琐和危险的工作任务。
工业机器人的一个重要应用领域是电机装配。
电机是各种机械设备的核心组件,如汽车、电子产品以及工业机械等。
因此,电机的装配过程对于设备的性能和质量至关重要。
本篇报告将重点探讨工业机器人装配电机的程序设计实训。
通过实践训练,我们将学习如何设计程序并将其应用于电机装配工作站。
首先,我们会介绍工业机器人装配电机的重要性,强调电机在各种机械设备中的关键作用。
其次,我们会详细讲解工业机器人装配电机的程序设计实训内容,包括任务分配、路径规划和动作控制等方面。
通过这些实训,我们可以提高工业机器人的装配效率和准确性,从而提升整体生产效益。
本报告的目的是总结和分享我们在工业机器人装配电机工作站程序设计实训中的经验和教训。
我们希望通过这篇报告,能够为其他对工业机器人装配电机程序设计感兴趣的读者提供一些有价值的参考和指导。
同时,我们也将展望未来,对工业机器人装配电机工作站程序设计的发展做出一些展望,希望能够为相关领域的研究和实践提供一些启示和借鉴。
在接下来的部分,我们将详细介绍工业机器人装配电机的重要性,以及工业机器人装配电机的程序设计实训内容。
通过对这些内容的学习和理解,我们将能够更好地应对电机装配工作中的挑战,提高装配效率和装配质量,为工业生产的自动化进程做出更大的贡献。
1.2 文章结构本文将分为引言、正文和结论三个部分来讨论工业机器人装配电机工作站程序设计实训报告。
在引言部分,我们将首先概述工业机器人装配电机的重要性,说明它在现代工业生产中的作用和意义。
接着,我们将介绍整篇文章的结构安排和各个部分的主要内容,使读者能够对文章的整体框架有一个清晰的了解。
在正文部分,我们将详细探讨工业机器人装配电机的程序设计实训。
首先,我们会阐述工业机器人装配电机的重要性,从而凸显实训的必要性。
工业机器人的编程与操作方法工业机器人是一种高度自动化的设备,可以完成各种任务,如搬运、装配、焊接等。
为了使机器人能够准确、高效地完成任务,需要进行编程和操作。
本文将介绍工业机器人的编程和操作方法。
一、编程方法1. 离线编程:离线编程是在计算机上进行机器人程序的编写和模拟。
首先,需要使用专业的机器人软件,如ABB RobotStudio、KUKA Sim、Fanuc RJ3等。
然后,通过图形界面或编程语言来编写机器人程序。
离线编程可以在计算机上进行,无需将机器人放置在生产线上,节省了时间和资源。
完成程序编写后,可以通过模拟功能进行程序仿真,以确保程序的可行性和准确性。
2. 在线编程:在线编程是在实际生产环境中对机器人进行编程。
这种编程方法需要专业的编程设备和软件。
首先,需要连接计算机和机器人,并确保通信正常。
然后,使用机器人控制器上的编程语言或机器人操作界面进行编写。
在线编程可以实时修改和调试程序,但需要在现场进行,可能会受到实际环境的限制。
二、操作方法1. 手动操作:手动操作是指通过外部操作设备,如手柄或按钮,来操控机器人完成任务。
手动操作通常用于机器人的调试和测试阶段,可以在不编写复杂程序的情况下对机器人进行控制。
但手动操作的精度较低,只适用于简单、粗略的操作。
2. 自动操作:自动操作是指通过事先编写好的程序,使机器人按照预定的路径和动作来完成任务。
自动操作需要在编程阶段对机器人的动作进行规划和设定,确保机器人可以准确无误地完成任务。
自动操作可以提高生产效率和产品质量,减少人为错误。
三、编程语言1. 基于图形界面的编程语言:图形界面编程语言是一种以图形元件为基础的编程语言,如ABB RobotStudio的RobotWare、KUKA Sim的KRL等。
这些编程语言通过拖拽和连接图形元素来编写机器人程序,使编程变得更加直观和易于理解。
它们适用于初学者和非专业人员,但在处理复杂的逻辑和算法时可能有限。
《工业机器人现场编程》课程整体教学设计(2017~ 2018学年第一学期)课程名称:工业机器人现场编程所属系部:机电工程系制定人:刘煜辉合作人:张婧制定时间: 2017年7月5日许昌职业技术学院课程整体教学设计一、课程基本信息二、课程目标设计总体目标:本门课程培养学生具有机器人使用方面基础知识,本课程主要研究机器人的结构、示教操作和离线编程。
通过本课程的学习,使学生掌握工业机器人基本概念、机器人运动学理论、工业机器人的常用指令、工业机器人程序的编写等方面的知识。
能力目标:1、能根据可编程控制系统职业岗位要求,分析控制系统的任务。
2、能够根据控制要求编写工业机器人运行程序。
3、能够熟练操作工业机器人。
4、能够根据智能制造的要求,完成工业机器人和其他设备之间的通讯连接。
知识目标:1、了解机器人的由来与发展、组成与技术参数,掌握机器人分类与应用,对各类机器人有较系统地完整认识。
2、了解机器人运动学、动力学的基本概念,能进行简单机器人的位姿分析和运动分析。
3、掌握机器人的常用指令。
4、领悟工业机器人的编程思想,掌握工业机器人控制系统的一般调试和排故方法。
5、熟悉工业机器人在工程中的一般应用方法。
素质目标:1、职业行为能力---养成良好的工作习惯,工作过程中器件、工具要合理放置,结束后能够按照要求将所有元器件复位,并完成工位的整理;2、团结协作能力---组建团队、明确团队的任务、角色和责任;团队成员间的沟通;冲突的协调和解决。
3、语言表达能力---项目设计成果、效果答辩;课堂讨论、调试过程说明。
三、课程内容设计:四、能力训练项目设计五、课程进程表六、第一节课梗概第一步融洽关系,介绍课程,明确课程与就业的关系。
1、自我介绍(师生互动、拉近距离、方便沟通);2、简述课程性质、课程目标定位、课程在专业能力培养中的地位及作用(为啥学);3、简述课程内容结构,告知课程进程表(学什么);4、简述课程特点、教学模式、教学方法与手段,提出学习要求(怎样学);5、介绍课程考核方法(学习成果如何检验);6、通过网上招聘信息和前几届学生在智能制造行业工作照片展示,明确本课程的就业岗位(增强学好信心;)第二步创设情境,导入项目,仿真演示,激发兴趣,教为主导,学为主体,学做合一。
工业机器人现场编程实训报告模板目录一、内容概述 (2)1.1 实训目的 (3)1.2 实训设备与工具 (3)1.3 实训流程安排 (5)二、工业机器人基础知识 (5)2.1 工业机器人的定义与分类 (7)2.2 工业机器人的技术参数 (8)2.3 工业机器人的应用领域 (9)三、工业机器人现场编程基础 (10)3.1 编程语言简介 (12)3.2 编程环境搭建 (13)3.3 常用编程指令介绍 (14)四、工业机器人现场编程实例 (15)4.1 软件编程实例 (17)4.1.1 基本操作 (17)4.1.2 简单路径规划 (19)4.1.3 自动化生产线编程 (19)4.2 硬件编程实例 (21)4.2.1 基本结构与编程方法 (23)4.2.2 常见接口与通信协议 (24)4.2.3 模块化设计与实现 (25)五、工业机器人现场编程问题与解决方案 (27)5.1 常见问题及解决方法 (28)5.1.1 编程错误与调试技巧 (29)5.1.2 设备故障诊断与处理 (30)5.1.3 系统安全与防护措施 (32)5.2 应急处理方案 (33)5.2.1 紧急停止与切断电源 (35)5.2.2 一般故障处理流程 (36)5.2.3 安全防护措施 (38)六、实训总结与展望 (39)6.1 实训成果展示 (40)6.2 存在问题与改进方向 (41)6.3 未来发展趋势与应用前景 (42)一、内容概述本实训报告主要围绕工业机器人的现场编程技术展开,详细介绍了实训的目标、设备环境、编程流程及实践操作等内容。
在实训目标部分,明确了通过本次实训应掌握的工业机器人基本操作技能、编程方法及实际应用能力。
阐述了实训的意义和价值,即提高工业机器人的操作水平,加深对其工作原理的理解,并为后续的工业自动化系统设计打下坚实基础。
在设备环境部分,对实训所使用的工业机器人、控制系统、编程软件等硬件和软件环境进行了详细介绍,包括其型号、规格、功能特点以及配置要求等,确保学员能够充分了解并熟悉实训环境。

《工业机器人应用技术》课程学生工作任务书班级:学号:组别:姓名:目录项目一初识工业机器人 (1)项目二示教器的使用 (3)项目三工业机器人的手动操作 (5)项目四工业机器人的自动运行 (7)项目五新建工具坐标系 (8)项目六新建工件坐标系 (9)项目七认识机器人程序及指令 (11)项目八轨迹示教编程 (13)项目九循环和IO控制指令的使用 (15)项目十模拟冲压流水线生产-未成品搬运示教编程 (16)项目十一模拟冲压流水线生产-上下料示教编程 (17)项目十二模拟冲压流水线生产-成品搬运码垛示教编程 (18)项目十三 ABB机器人I/O板配置 (19)项目十四 ABB机器人I/O信号监控与操作 (21)项目十五认识ROBOTART及建模环境搭建 (22)项目十六ABB机器人ROBOTART离线编程软件应用——轨迹设计 (25)项目十七写字离线编程代码真机联调运行 (27)项目一初识工业机器人一、任务描述在简单了解世界各地对机器人的定义的基础上,能够认识常用的ABB工业机器人并知道ABB机器人在使用过程中的注意事项。
二、实训目的1、工业机器人的定义;2、工业机器人基本组成及原理。
3、ABB机器人的发展;4、ABB机器人使用过程中的注意事项。
三、相关知识1、工业机器人的由来(1)阿西莫夫“机器人三定律”(2)为什么要用机器人?☐有些工作对人体有伤害,如喷漆,重物搬运;☐有些产品要求极高的质量,如焊接、精密装配;☐有些工作人难以参与,如核燃料加注、高温熔炉;☐有些工作枯燥乏味,如流水生产线。
2、工业机器人的定义(1)定义(2)工业机器人的优越性(3)工业机器人的典型应用工业机器人的典型应用包括焊接、喷涂、装配、采集和放置(例如包装、码垛和SMT)、产品检验和测试等。
3、工业机器人基本组成及原理(1)机器人一般构成本体、控制柜、示教器(2)工业机器人的分类(3)工业机器人的品牌工业机器人四大家族:ABB(瑞典),库卡(库卡),发那科(日本),安川(日本)。
《工业机器人现场编程(ABB)》实训课程实训报告系 / 部:管理工程系班级:高职机器1901指导教师:姓名:学号:职业技术学院日期: 2021.1.13一、实训目的和要求实训目的:掌握ABB工业机器人Rapid搬运码垛编程实训任务:1.完成工具坐标系(TCP)标定2.完成工件坐标系标定3.创建位置坐标矩阵posmatrix4.创建例行程序writepos实现位置坐标赋值5.创建例行程序getpos实现位置坐标取值6.创建例行程序grip实现定点搬运码垛功能二、实训环境1.实训地址:3-103工业机器实训室2.实训平台:HRG-HD1XKA型工业机器人技能考核实训台3.实训模块:RMA04MK搬运模块4.机器人工(夹)具:真空吸盘5.I/O配置:序号名称信号类型映射地址功能1 Di_01_start 数字输入信号0 控制机器人启动2 Di_02_stop 数字输入信号 1 控制机器人停止3 Do_02_vacuum 数字输出信号 1 控制真空吸盘开启和关闭三、实训内容1.工具坐标系(TCP)标定多位置设定工具坐标多位置设定工具坐标2.工件坐标系标定利用三点法对工件坐标进行创建多位置设定工具坐标三点法设置工件坐标:点一三点法设置工件坐标:点二三点法设置工件坐标:点三3.robtarget数据类型posarray矩阵创建在程序数据—robtarget中创建posarray函数,4.writepos例行程序创建与功能实现在程序编辑器—writepos例行程序中创建posarray函数赋值程序并编写与赋值程序编辑器中建立函数Writepos例行程序函数赋值代码利用机器人对各个位置进行赋值5.getpos例行程序创建与功能实现在程序编辑器中创建getpos例行程序并添加i与targetpos参数,并编写矩阵运算函数实现代码:Posarray函数所赋参数Getpos所创建的运算函数X=(i-1)DIV 3+1Y=(i-1)MOD 3+1Targetpos=posarray(X,Y)6.grip例行程序创建与功能实现在程序编辑器中创建grip例行程序并添加X,Y参数,运用MoveJ、MoveL、MoveAbsj移动指令以及set、reset与waittime动作指令进行程序编写,以实现对物品进行搬运的动作效果。
⼯业机器⼈现场编程实习任务《⼯业机器⼈应⽤技术》课程学⽣⼯作任务书班级:学号:组别:姓名:⽬录项⽬⼀初识⼯业机器⼈ (1)项⽬⼆⽰教器的使⽤ (3)项⽬三⼯业机器⼈的⼿动操作 (5)项⽬四⼯业机器⼈的⾃动运⾏ (7)项⽬五新建⼯具坐标系 (8)项⽬六新建⼯件坐标系 (9)项⽬七认识机器⼈程序及指令 (11)项⽬⼋轨迹⽰教编程 (13)项⽬九循环和IO控制指令的使⽤ (15)项⽬⼗模拟冲压流⽔线⽣产-未成品搬运⽰教编程 (16)项⽬⼗⼀模拟冲压流⽔线⽣产-上下料⽰教编程 (17)项⽬⼗⼆模拟冲压流⽔线⽣产-成品搬运码垛⽰教编程 (18)项⽬⼗三 ABB机器⼈I/O板配置 (19)项⽬⼗四 ABB机器⼈I/O信号监控与操作 (21)项⽬⼗五认识ROBOTART及建模环境搭建 (22)项⽬⼗六ABB机器⼈ROBOTART离线编程软件应⽤——轨迹设计 (25)项⽬⼗七写字离线编程代码真机联调运⾏ (27)项⽬⼀初识⼯业机器⼈⼀、任务描述在简单了解世界各地对机器⼈的定义的基础上,能够认识常⽤的ABB⼯业机器⼈并知道ABB机器⼈在使⽤过程中的注意事项。
⼆、实训⽬的1、⼯业机器⼈的定义;2、⼯业机器⼈基本组成及原理。
3、ABB机器⼈的发展;4、ABB机器⼈使⽤过程中的注意事项。
三、相关知识1、⼯业机器⼈的由来(1)阿西莫夫“机器⼈三定律”(2)为什么要⽤机器⼈?有些⼯作对⼈体有伤害,如喷漆,重物搬运;有些产品要求极⾼的质量,如焊接、精密装配;有些⼯作⼈难以参与,如核燃料加注、⾼温熔炉;有些⼯作枯燥乏味,如流⽔⽣产线。
2、⼯业机器⼈的定义(1)定义(2)⼯业机器⼈的优越性(3)⼯业机器⼈的典型应⽤⼯业机器⼈的典型应⽤包括焊接、喷涂、装配、采集和放置(例如包装、码垛和SMT)、产品检验和测试等。
3、⼯业机器⼈基本组成及原理(1)机器⼈⼀般构成本体、控制柜、⽰教器(2)⼯业机器⼈的分类(3)⼯业机器⼈的品牌⼯业机器⼈四⼤家族:ABB(瑞典),库卡(库卡),发那科(⽇本),安川(⽇本)。