Robust chaotic control of Lorenz system by backstepping design 2008
- 格式:pdf
- 大小:456.84 KB
- 文档页数:11

磁罗经校正师英语资料Being a magnetic compass adjuster is not just a career for me, but a passion that I have been cultivating for years. 磁罗经校正不仅仅是我的职业,更是我多年来培养的一种激情。
I have always been fascinated by the intricacies of magnetic fields and their impact on navigation, which led me to pursue a career in this specialized field. 我一直被磁场的复杂性以及它们对导航的影响所吸引,这促使我选择在这个专业领域发展。
I believe that a magnetic compass adjuster plays a crucial role in ensuring the accuracy and reliability of navigation systems, which are essential for safe and efficient marine operations. 我相信磁罗经校正师在确保导航系统的准确性和可靠性方面起着至关重要的作用,这对于安全高效的航海操作至关重要。
In my line of work, attention to detail is paramount as even the slightest deviation in magnetic compass readings can have serious consequences for navigation. 在我的工作中,注重细节至关重要,因为即使磁罗经读数有细微的偏差,也会对导航产生严重后果。
I take great pride in my ability to meticulously calibrate magnetic compasses to ensure they are in perfect alignment with the Earth's magnetic field.我以自己精密校准磁罗经的能力感到非常自豪,确保它们与地球磁场完美对齐。

Robust ControlRobust control is a critical aspect of engineering that focuses on designing systems that can withstand various uncertainties and disturbances. It involves developing control strategies that can adapt to changing conditions and maintain stability and performance. Robust control plays a crucial role in ensuring the reliability and safety of complex systems, such as aircraft, automotive systems, and industrial processes. One of the key challenges in robust control is dealing with uncertainties in the system model. Real-world systems are often subject to variations and disturbances that are difficult to predict or quantify. Robust control techniques aim to account for these uncertainties by designing controllers that can provide satisfactory performance under a wide range of operating conditions. This requires a deep understanding of system dynamics and the ability to develop control strategies that are resilient to variations in the system parameters. Another important aspect of robust control is the trade-off between performance and robustness. In many cases, increasing the robustness of a control system can come at the cost of reduced performance. Designing a robust controller that can maintain stability while also achieving desired performance criteria is a complex optimization problem that requires careful consideration of trade-offs. Engineers must strike a balance between robustness and performance to ensure that the control system meets the requirements of the application. Robust control techniques can be classified into two main categories: robust stabilization and robust performance. Robust stabilization focuses on ensuring that the system remains stable in the presence of uncertainties, while robust performance aims to achieve specific performance criteria, such as tracking accuracy or disturbance rejection, under uncertain conditions. Both aspects are essential for designing control systems that can operate effectively in real-world environments. One common approach to robust control is H-infinity control, which is based on the H-infinity norm of a transfer function. H-infinity control is a powerful technique for designing controllers that can provide robust performance guarantees in the presence of uncertainties. By optimizing the H-infinity norm of the system, engineers can design controllers that are robust to variations in the system parameters and disturbances. H-infinity control has been successfully applied to awide range of applications, including aerospace, automotive, and industrialcontrol systems. Overall, robust control is a critical aspect of engineering that plays a vital role in ensuring the reliability and performance of complex systems. By developing control strategies that can adapt to uncertainties and disturbances, engineers can design systems that are robust and resilient to changing conditions. Robust control techniques, such as H-infinity control, provide powerful tools for designing controllers that can meet the requirements of modern engineering applications. By considering the trade-offs between performance and robustness, engineers can design control systems that achieve the desired balance between stability and performance.。
中国物理学会2011秋季学术会议磁学MB 口头报告或海报新型自旋振荡磁性生物传感器夏海艳,牟从普,朱起源,张彬,王伟伟,刘青芳,王建波*兰州大学物理科学与技术学院磁学与磁性材料教育部重点实验室,兰州,730000E-mail: wangjb@关键字:自旋转移磁矩;生物磁性传感器;微磁学自1996年理论预言“自旋转移矩(spin transfer torque, STT)”效应[1-2]到1998 年被实验证实[3],STT 效应受到人们的广泛关注。
其重要之处在于,STT效应不仅在理论上提出了控制磁性材料的磁矩的新理念,而且预计将由此衍生出一批新型自旋电子器件。
例如,驱动磁化翻转的特性可用于电流操控的磁性随机存储器 [3],激发磁化矢量周期性振荡的特性可用来研发新型非机械型纳米微波器(spin torque oscillator, STO)[4]。
由于STO的周期振荡频率对外磁场有很好的线性关系,我们基于STO,设计了一种新型磁性生物传感器:STO biosensor。
微磁学模拟结果显示这种新型生物传感器能探测到直径为40纳米的单个磁性纳米颗粒,在单分子生物分子识别以及药物诊断方面具有潜在应用。
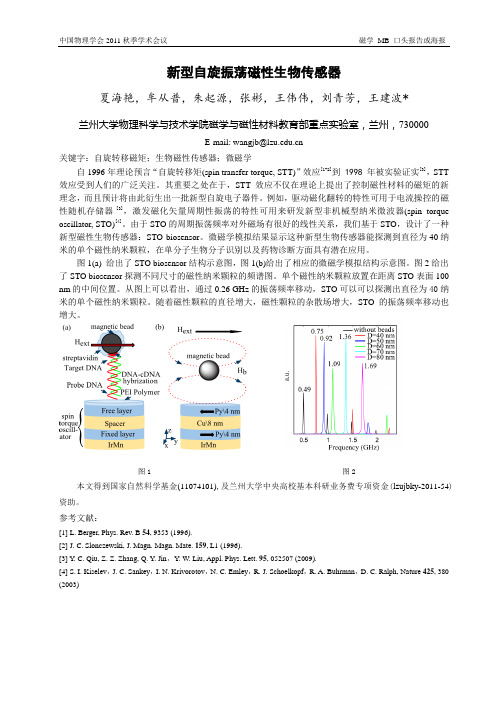
图1(a) 给出了STO biosensor结构示意图,图1(b)给出了相应的微磁学模拟结构示意图。
图2给出了STO biosensor探测不同尺寸的磁性纳米颗粒的频谱图。
单个磁性纳米颗粒放置在距离STO表面100 nm的中间位置。
从图上可以看出,通过0.26 GHz的振荡频率移动,STO可以可以探测出直径为40纳米的单个磁性纳米颗粒。
随着磁性颗粒的直径增大,磁性颗粒的杂散场增大,STO的振荡频率移动也增大。
图1 图2本文得到国家自然科学基金(11074101),及兰州大学中央高校基本科研业务费专项资金(lzujbky-2011-54)资助。
参考文献:[1] L. Berger, Phys. Rev. B 54, 9353 (1996).[2] J. C. Slonczewski, J. Magn. Magn. Mate. 159, L1 (1996).[3] Y. C. Qiu, Z. Z. Zhang, Q. Y. Jin,Y. W. Liu, Appl. Phys. Lett. 95, 052507 (2009).[4] S. I. Kiselev,J. C. Sankey,I. N. Krivorotov,N. C. Emley,R. J. Schoelkopf,R. A. Buhrman,D. C. Ralph, Nature 425, 380 (2003)。


第40卷第5期2022年10月沈阳师范大学学报(自然科学版)J o u r n a l o f S h e n y a n g N o r m a lU n i v e r s i t y(N a t u r a l S c i e n c eE d i t i o n)V o l.40N o.5O c t.2022文章编号:16735862(2022)05042105四模L o r e n z-S t e n f l o系统动力学行为分析及其数值仿真王贺元,白晨(沈阳师范大学数学与系统科学学院,沈阳110034)摘要:在三模L o r e n z方程的基础上,进一步研究四模L o r e n z-S t e n f l o系统的动力学行为,讨论L o r e n z-S t e n f l o方程解的性质和状态㊂求出该方程平衡点,计算其局部线性稳定性;利用Y o u n g不等式和G r o n w a l l不等式讨论该方程组全局吸引子的存在性,构造李雅普诺夫函数对其全局稳定性进行分析;最后利用数值模拟方法,揭示了参数在一定范围内变化时四模L o r e n z-S t e n f l o系统的动力学行为㊂人们对非线性现象的本质认识有限,所以通过数值模拟,能更加生动形象地描述出L o r e n z-S t e n f l o吸引子的形状,进而让人们对该模型的混沌现象有更直观清晰的认识㊂参数的变化也导致了系统动力学行为的变化,在L o r e n z系统加入气流旋转因素后,系统的动力学行为更加丰富㊂关键词:L o r e n z方程;L o r e n z-S t e n f l o方程;混沌;吸引子中图分类号:O415.5文献标志码:Ad o i:10.3969/j.i s s n.16735862.2022.05.007D y n a m i cb e h a v i o ra n a l y s i sa n dn u m e r i c a ls i m u l a t i o no ff o u r-d i me n s i o n a l L o r e n z-S t e nf l o s y s t e mWA N G H e y u a n,B A IC h e n(C o l l e g e o fM a t h e m a t i c s a n dS y s t e m sS c i e n c e,S h e n y a n g N o r m a lU n i v e r s i t y,S h e n y a n g110034,C h i n a)A b s t r a c t:B a s e d o nt h et h r e e-d i m e n s i o n a lL o r e n ze q u a t i o n,w ef u r t h e rs t u d y t h e d y n a m i c a lb e h a v i o r o f t h e f o u r-d i m e n s i o n a l L o r e n z-S t e n f l o s y s t e ma n dd i sc u s s t h e p r o p e r t i e s a nd s t a te s of t h es o l u t i o no f t h eL o r e n z-S t e n f l oe q u a t i o n.T h ee q u i l i b r i u m p o i n to f t h ee q u a t i o n i so b t a i n e da n d i t sl o c a l l i n e a r s t a b i l i t y i s c a l c u l a t e d;U s i n g Y o u n g i n e q u a l i t y a n dG r o n w a l l i n e q u a l i t y,t h e e x i s t e n c e o ft h e g l o b a la t t r a c t o ro ft h ee q u a t i o n si sd i s c u s s e d,a n dt h eL y a p u n o vf u n c t i o ni sc o n s t r u c t e dt oa n a l y z e i t s g l ob a l s t a b i l i t y;F i n a l l y,u s i n g t h en u m e r ic a l s i m u l a t i o n m e t h o d,t h ed y n a m i cbe h a v i o ro f f o u r-d i m e n s i o n a l L o r e n z-S t e n f l o s y s t e mi s i n t u i t i v e l y d i s p l a y e dw h e n t h e p a r a m e t e r s c h a n g e i nac e r t a i n r a n g e.P e o p l e h a v e l i m i t ed u n de r s t a n d i n g of t h e e s s e n c e o f n o n l i n e a r p h e n o m e n a,s o t h r o ug hn u m e r i c a l s i m u l a t i o n,w e c a nm o r e v i v i d l y d e s c r i b e t h e s h a p e o fL o r e n z-S t e n f l o a t t r a c t o r,a n d t h e nl e t p e o p l eh a v e am o r e i n t u i t i v ea n dc l e a ru n d e r s t a n d i n g o f t h ec h a o t i c p h e n o m e n o no f t h em o d e l.T h e c h a n g e o f p a r a m e t e r s a l s o l e a d s t o t h e c h a n g e o f c h a o t i cb e h a v i o r o f t h e s y s t e m.A f t e r t h e a i rf l o wr o t a t i o n f a c t o r i s a d d e d t o t h eL o r e n z s y s t e m,t h e d y n a m i cb e h a v i o r o f t h e s y s t e mi s r i c h e r.K e y w o r d s:L o r e n z e q u a t i o n;L o r e n z-S t e n f l o e q u a t i o n;c h a o s;a t t r a c t o r0引言1963年,美国气象学家L o r e n z[1]利用截谱方法,讨论了R a y l e i g h-B e n a r d对流问题,得到了一个三维的非线性常微分方程组,也就是通常所说的L o r e n z系统㊂收稿日期:20211027基金项目:国家自然科学基金资助项目(11572146)㊂作者简介:王贺元(1963 ),男,辽宁锦州人,沈阳师范大学教授,博士㊂x ᶄ1=q (x 2-x 1)x ᶄ2=r x 1-x 1x 3-x 2x ᶄ3=x 1x 2-b x {3 随后,众多学者对L o r e n z 系统的各种特性展开了深入研究,揭示了该系统动力学行为的演化过程[26]及产生混沌的力学机制机理[7]㊂随着各种研究的不断深入,基于L o r e n z 系统,人们给出了丰富多样的修正模型,如四模类[8]㊁五模类[910]㊁九模类[11]等㊂瑞典物理学家L e n n a r t -S t e n f l o [12]发现,大气中低频短波重力扰动可以用4个广义L o r e n z 方程组来描述㊂当不考虑地球自转时,这些耦合方程简化为三模常规的L o r e n z 方程㊂这个低频和短波近似的大气方程即L o r e n z -S t e n f l o 模型:xᶄ1=q (x 2-x 1)+s x 4x ᶄ2=r x 1-x 1x 3-x 2x ᶄ3=x 1x 2-b x 3x ᶄ4=-x 1-qx ìîíïïïï4(1)其中:新增的状态变量x 4描述了气流的旋转;新增的参数s 是与x 4相对应的旋转数(r o t a t i o n n u m b e r );q 表示普朗特数(P r a n d t ln u m b e r );r 表示瑞利数(R a y l e i g h n u m b e r );b 表示几何参数(ge o m e t r i c p a r a m e t e r )㊂在小旋转数s 的情况下,随着r 的变化,该系统的分岔结构和L o r e n z 系统是相近的[13]㊂若将旋转数s 视为分岔参数,那么随着s 的变化,该系统的分岔结构便与一维逻辑斯蒂映射非常相似[14]㊂1 L o r e n z -S t e n f l o 系统的吸引子和稳定性多数非线性微分方程很难求出其解的具体表达式,因此,在不具体解出方程的情况下,判断方程的解的稳定性态以及解的性态就显得尤为重要㊂从物理意义方面考虑非线性微分方程的解的稳定性同样具有现实意义[15]㊂1.1 平衡点先求方程组x ᶄ1=x ᶄ2=x ᶄ3=x ᶄ4=0,解得平衡点O =(0,0,0,0)㊂当r -1-s /q 2>0,即(r -1)q 2>s 时,出现了2个新的对称平衡点P +=(p 1,p 2,p 3,p 4),P -=(-p 1,-p 2,p 3,-p 4),其中p 1=b q 2p 3q 2+s ,p 2=b (q 2+s )p 3q 2,p 3=r -1-s q 2,p 4=-b p 3q2+s ㊂1.2 零点的线性稳定性在零点附近做线性近似,得到一个四阶矩阵,该四阶矩阵有特征值方程:(λ+b )[λ3+(2q +1)λ2+(q 2+2q -r q +s )λ+(q 2-q 2r +s)]=0由劳斯赫尔维茨稳定性判据,满足下列条件时,方程只有负实部的解:2q +1>0q 2+2q -r q +s >0q 2-q 2r +s >0(2q +1)(q 2+2q -r q +s )-(q 2-q 2r +s)>ìîíïïïï0 当r 足够小(无物理意义)时,方程只有负实部的解,而当q 2-q 2r +s =0即r =q 2+s q2时,系统从稳定过渡到不稳定,由此可知原系统的零解是不稳定的㊂1.3 对称点的线性稳定性作平衡点附近的代换x i =p i +Xi (i =1,2,3,4),根据劳斯赫尔维茨稳定性判据,其性质与原点的稳定性基本相同㊂1.4 全局吸引子存在性分析由췍x ᶄ1췍x 1+췍x ᶄ2췍x 2+췍x ᶄ3췍x 3+췍x ᶄ4췍x 4=-2q -1-b <0可知,系统耗散,故存在吸引子㊂作代换x 1ңx 1,x 2ңx 2,x 3ңx 3+r +q ,x 4ңx 4,于是有12d d t(x 21+x 22+x 23+x 24)+(q x 21+x 22+b x 23+q x 24)=(s -1)x 1x 4-b (r +q )x 3224沈阳师范大学学报(自然科学版) 第40卷令u (t )2=x 21+x 22+x 23+x 24,有d d t (u 2)+(2q -s +1)x 21+2x 22+2x 23+(2q -s +1)x 24ɤb 2(r +q )22(b -1)因2q -s +1ȡ0,令l =m i n q -s -12,æèçöø÷1,有d d t(u 2)+2lu 2ɤb 2(r +q )22(b -1)由G r o n w a l l 不等式得|u (t )|2ɤ|u (0)|2e -2l t +b 2(r +q )24l (b -1)(1-e -2l t )进而有l i m t ңɕs u p u (t )2ɤb (r +q )4l (b -1),于是有2q -s -1ȡ0时,系统具有全局吸引子㊂1.5 全局稳定性借助李雅普诺夫函数法,讨论系统(1)的全局稳定性㊂构造李雅普诺夫函数:V (x 1,x 2,x 3,x 4)=x 21+x 22+x 23+s x 24=K ȡ0显然,当K 是常数时,上式表示一个四维椭球面,把这个椭球面所包围的单连通区域记做H ,K 越大,椭球面越大㊂求V 的导数:d V d t=-2q x 21+x 22+b x 23+q s x 24+b (r +q )x 3+b 4(r +q )2-b 4(r +q )éëêùûú2显然,下式可以视为一个四维椭球面,记为U ,则qx 21+x 22+b x 3+(r +q )æèçöø÷22+q s x 24=b 4(r +q )2d V d t <0,在U 以外区域=0,在U 上>0,在U ìîíïïïï以内于是,若取较大的K ,H 可以包围U ㊂这样在U 以外的区域,d V d t >0,V d V d t>0㊂由李雅普诺夫定理的分析可知,H 外的轨线都会进入H 内㊂由此可知,H 是这个L o r e n z -S t e n f l o 系统的捕捉区㊂2 数值仿真由文献[16]可知,参数取q =10,s =30,b =8/3符合物理含义,在这几个取值条件下对L o r e n z -S t e n f l o 系统的动力学行为进行数值仿真㊂2.1 最大李雅普诺夫指数李雅普诺夫指数是衡量系统动力学特性的一个重要的定量指标,正的李雅普诺夫指数意味着,无论2条轨线的初始间距多么小,其差别都会随着时间的演化而成指数率增加,以至于无法预测,这就是混沌现象㊂图1为瑞利数从0~600变化时的最大李雅普诺夫指数㊂图1 最大李雅普诺夫指数F i g .1 M a x i m u m L y a p u n o ve x po n e n t 324第5期 王贺元,等:四模L o r e n z -S t e n f l o 系统动力学行为分析及其数值仿真2.2分岔图状态变量和分岔参数构成的二维图形表示状态变量随分岔参数变化的规律㊂通过分岔图可以得到系统响应的周期运动或者拟周期运动以及混沌运动所对应的参数区间,在一定程度上可以用于判定通向混沌的道路㊂图2为瑞利数从0~600变化时的分岔图㊂2个图像对比可见,最大李雅普诺夫指数越大,分岔图对应的系统混沌程度越大㊂图2 分岔图F i g .2 B i f u r c a t i o nd i a gr a m 2.3 吸引子空间中每一点都表示系统在某一时刻的状态,当状态发生变化时,相空间的点移动进而构成轨迹,在轨迹上的点的不变集则为吸引子㊂周期振荡的吸引子为一条封闭的曲线,也就是极限环㊂准周期震荡则为轮胎型的曲面㊂混沌吸引子的轨迹具有局部不稳定性㊁整体有限性和结构自相似性等特点㊂以洛伦兹方程为例,其吸引子轨迹类似于蝴蝶,如图3和图4所示㊂图3 r =280吸引子F i g .3 a t t r a c t o r g r a p ha t r =280图4 r =300吸引子F i g .4 a t t r a c t o r g r a pha t r =3002.4庞加莱截面图5 庞加莱截面F i g.5 P o i n c a r es e c t i o na t r =248维数比相空间少的低维截面与吸引子相截得到庞加莱截面㊂庞加莱截面法就是把连续的轨线变为离散的点,进而研究运动的特征和变化规律㊂图5为瑞利数取248时x 1与x 2的庞加莱截面,由图5可知,系统处在混沌状态,截面与洛伦兹系统的蝴蝶形状相似㊂2.5 时间序列用数值方法将方程的解随时间变化的过程描述出来,也就是混沌运动的时间过程,以直观清楚地反映系统响应随时间变化的规律㊂图6为瑞利数取248时x 1与424沈阳师范大学学报(自然科学版) 第40卷图6 时间序列F i g.6 T i m es e r i e s a t r =248时间t 的时间序列,由图6可以看出,系统的解并不是简单的周期解,而是非周期的㊁复杂的㊁混沌的㊂3 结 论通过对L o r e n z -S t e n f l o 系统的数值运算,得到该系统的平衡点及局部和全局稳定性等性质㊂通过对L o r e n z -S t e n f l o 系统的数值仿真,发现其三维图像经历了奇怪吸引子㊁拟周期轨道㊁极限环等形状,系统存在复杂的窗口期和倒分岔过程㊂综上所述,在考虑气流旋转因素这一前提下,随着瑞利数的增加,该系统的动力学行为的变化更为复杂㊂参考文献:[1]L O R E N ZE N.D e t e r m i n i s t i cn o n pe r i o d i cf l o w [J ].A t m o sS c i ,1963,20:130141.[2]B HA T T A C HA R J E EJK ,M C K A N E AJ .L o r e n zm o d e l f o r t h e r o t a t i ng R a y l e i gh -B ér n a r d p r o b l e m [J ].JP h y sA :M a t hG e n ,1988,21(10):L 555L 558.[3]张银.旋转R a y l e i g h -B én a r d 问题的L o r e n z 模型及数值模拟[D ].北京:北京化工大学,2011:2532.[4]张银,许兰喜.旋转的R a y l e i g h -B én a r d 问题的L o r e n z 模型及数值模拟[J ].北京化工大学学报(自然科学版),2010,37(3):140143.[5]鞠春贤,王贺元.浅析L o r e n z 方程[J ].辽宁工学院学报,2007(5):337341.[6]王贺元,崔进.旋转流动混沌行为的全局稳定性分析及数值仿真[J ].数学物理学报,2017,37(4):783792.[7]王贺元.平面不可压缩N a v i e r -S t o k e s 方程五模系统的力学机理及能量演化[J ].数学物理学报,2020,40(2):315327.[8]王贺元,鞠春贤.四模L o r e n z 系统的动力学行为及其数值模拟[J ].高等学校计算数学学报,2010,32(2):99105.[9]王贺元,李佳,王美玉,等.新五模类L o r e n z 系统的动力学行为分析及仿真[J ].沈阳师范大学学报(自然科学版),2020,38(2):164170.[10]王贺元.平面不可压缩磁流体动力学五模类L o r e n z 方程组的动力学行为及其数值仿真[J ].数学物理学报,2017,37(1):199216.[11]王贺元,崔进.N a v i e r -S t o k e s 方程九模类L o r e n z 方程组的动力学行为及数值仿真[J ].工程数学学报,2015,32(6):893897.[12]S T E N F L OL .G e n e r a l i z e dL o r e n z e q u a t i o n s f o r a c o u s t i c -g r a v i t y w a v e s i n t h e a t m o s p h e r e [J ].P h y s i c a S c r i p t a ,1996,53(1):8384.[13]Y U M Y ,Y A N G B .P e r i o d i ca n dc h a o t i c s o l u t i o n so f t h e g e n e r a l i z e dL o r e n z e q u a t i o n s [J ].P h y s i c aS c r i p t a ,1996,54(2):140142.[14]Y U M Y ,Z HO U C T ,L A IC H.T h eb i f u r c a t i o nc h a r a c t e r i s t i c so f t h e g e n e r a l i z e dL o r e n ze q u a t i o n s [J ].P h y s i c a S c r i p t a ,1996,54(4):321324.[15]王贺元.非线性系统的动力学行为及其数值分析[M ].北京:科学出版社,2018:3839.[16]Y U M Y.S o m e c h a o t i c a s p e c t s o f t h eL o r e n z -S t e n f l o e q u a t i o n s [J ].P h y s i c aS c r i p t a ,1999,82(1):1011.524第5期 王贺元,等:四模L o r e n z -S t e n f l o 系统动力学行为分析及其数值仿真。
Robust chaotic control of Lorenz system bybackstepping designChao-Chung Peng,Chieh-Li Chen*Department of Aeronautics and Astronautics,National Cheng Kung University,Tainan,TaiwanAccepted 7September 2006Communicated by Prof.Ji-Huan HeAbstractThis work presents a robust chaotic control strategy for the Lorenz chaos via backstepping design.Backstepping technique is a systematic tool of control law design to provide Lyapunov stability.The concept of extended system is used such that a continuous sliding mode control (SMC)effort is generated using backstepping scheme.In the pro-posed control algorithm,an adaptation law is applied to estimate the system parameter and the SMC offers the robust-ness to model uncertainties and external disturbances so that the asymptotical convergence of tracking error can be achieved.Regarding the SMC,an equivalent control algorithm is chosen based on the selection of Lyapunov stability criterion during backstepping approach.The converging rate of error state is relative to the corresponding dynamics of sliding surface.Numerical simulations demonstrate its advantages to a regulation problem and an orbit tracking prob-lem of the Lorenz chaos.Ó2006Elsevier Ltd.All rights reserved.1.IntroductionThe chaotic behavior is a very interesting nonlinear phenomenon which has been intensively studied during the last two decades.The effect of chaotic system is usually undesirable in practice due to its sensitivity to initial conditions,unpredictable behavior and thereby restricts the operation of physical plants.Because of the difficulty of accurate pre-diction of a chaotic system behavior,chaos may cause system instability or degradation in performance,and it should be eliminated in many cases.Regarding the field of chaotic analysis and control,the Lorenz system is often taken as a paradigm,since it captures many of the features of chaotic dynamics.For example,the Lorenz system describes some of the unpredictable behavior which associates with the weather.It also formulates an incompressible fluid between two parallel horizontal bound-aries,with the lower boundary at a higher temperature than the upper boundary.Many approaches and techniques have been proposed for the control of chaos such as OGY method [1],bang–bang control [2],optimal control [3],intelligent control base on neural network [4],feedback linearization [5],differential0960-0779/$-see front matter Ó2006Elsevier Ltd.All rights reserved.doi:10.1016/j.chaos.2006.09.057*Corresponding author.Tel.:+88662389121/4;fax:+88662389940.E-mail address:chiehli@.tw (C.-L.Chen).Available online at Chaos,Solitons and Fractals 37(2008)598–608geometric method [6],adaptive control [7–10],H 1control method [11],and many others [12,13].Sliding mode control (SMC)provides an effective alternative to deal with uncertain chaotic systems.However,it is assumed that the control can be applied with infinite fast switching.In practice,it is impossible due to finite time delays and therefore causes limitation in practical system.This non-ideal switching will result in an undesirable phenomenon so-called chattering which deteriorates system performance and also cause wear and tear in mechanical devices.In order to overcome this chattering phenomenon,the concept of extended systems is used,and it has been successfully applied in controlling chaos [14,15]and physical plant [16].The backstepping approach is one of the most popular nonlinear techniques of control design.It is capable of generating a globally asymptotically stabilizing control laws to suppress and synchronize chaotic system [17–20].Publications regarding Lorenz chaos control,assumed that precise model parameters are available for the feedback linearization and the system is not subjected to external disturbance.However,the ideal condition can not always be provided.In this work,a control strategy was developed for chaos suppression as well as model uncertainties and dis-turbance.The proposed strategy belongs to an input-output control scheme which inherits advantages of adaptive con-trol and SMC via the backstepping design procedure.The adaptation law was design for parameter estimation whereas SMC mainly focuses on the disturbance elimination.The extended model corresponding to the chaotic system is for-mulated to obtain a continuous control input.Simulation results verify that the proposed controller can suppress the Lorenz chaos in spite of model uncertainties and external disturbances.2.System description for uncertain nonlinear systemsConsider the following class of nonlinear systems whose trajectories are contained in a chaotic attractor:_x¼f ðx Þþg ðx ÞÁu ;ð1Þwhere x (t )2R n is a state vector,u 2R is a scalar input,and f (x )and g (x )are smooth vector fields.Generally,the non-linear mode is only an approximate description of the actual plant due to the presence of various uncertainties.Some n -th order nonlinear chaotic dynamical systems with the relative degree n may be directly described or transformed by states transformation as follows:_xi ¼x i þ1;16i 6n À1_x n ¼b 0ðX ;t ÞþD b ðX ;t Þþd ðt Þþu ðt Þ&;x ¼½x 1x 2ÁÁÁx n 2R n ;ð2Þwhere x ðt Þ¼½x 1ðt Þx 2ðt ÞÁÁÁx n ðt Þ ¼½x ðt Þ_xðt ÞÁÁÁx ðn À1Þðt Þ 2R n is the state vector,D b (x ,t )is continuous uncertainty of chaotic systems,u (t )2R is the control input,and d (t )is denoted as the continuous,smooth external disturbance.In general,the uncertain term D b (x ,t )and disturbance term d (t )are assumed bounded,i.e.j D b ðx ;t Þj 6a and j d ðt Þj 6b ;ð3Þwhere a ,b are positive scalar.The control task is to force the system to track an n -dimensional desired vector x d (t ),where x d ðt Þ¼½x d 1ðt Þ;x d 2ðt Þ;ÁÁÁ;x dn ðt Þ ¼½x d ðt Þ;_x d ðt Þ;ÁÁÁ;x ðn À1Þd,which belong to a class of continuous functions on [t 0,1].Define the tracking error ase ðt Þ¼x d ðt ÞÀx ðt Þ¼½x d ðt ÞÀx ðt Þ_xd ðt ÞÀ_x ðt ÞÁÁÁx ðn À1Þd ðt ÞÀx ðn À1Þðt Þ ¼½e ðt Þ_eðt ÞÁÁÁe ðn À1Þðt Þ ¼½e 1ðt Þe 2ðt ÞÁÁÁe n ðt Þ ð4ÞThe control goal considered in this paper is that for any given set point or target orbit,an integral type backsteppingsliding mode control law is designed,such that the resulting state response of tracking error vector satisfieslim t !1k e ðt Þk ¼lim t !1k x d ðt ÞÀx ðt Þk !0:ð5Þwhere k Æk is the Euclidean norm of a vector.3.Backstepping design for the Lorenz chaotic systemIn 1963,Lorenz proposed a simple model which describes the unpredictable behavior of the weather.The dynamic of Lorenz’s equations can be written asC.-C.Peng,C.-L.Chen /Chaos,Solitons and Fractals 37(2008)598–608599_x1¼Àr x1þr x2_x2¼rx1Àx2Àx1x3_x3¼x1x2Àbx3ð6Þwhere r and r are relative to the Prandtl number and Rayleigh number,respectively.The parameter b belongs to a geo-metric factor.Depending on these parameter values,the Lorenz system performs complex dynamics as shown in Fig.1a and b.With the initial condition was placed at(10,10,10)and the values are taken as r=10,r=28and b=8/3,the dynamic behavior(6)acts a two-lobed pattern so called the butterfly effect.3.1.Lorenz system standardization with control input and disturbanceConsider the following chaotic system with external disturbance d._x1¼Àr x1þr x2_x2¼rx1Àx2Àx1x3þuþd_x3¼x1x2Àbx3ð7Þwhere u2R1is a scalar control input and d is denoted as the bounded disturbance,that is j d j6b.One of the control purposes is to stabilize the system to a specific state,and the other task is to force the system response to the desired orbit by u in the direction of x2even when the system is experiencing parameter uncertainty and disturbance.Let the control input u=u1+u2and u1=x1(t)x3(t)such that one can obtain the following decoupled system _x1¼Àr x1þr x2_x2¼rx1Àx2þu2þdð8Þand_x3¼x1x2Àbx3ð9ÞEq.(9)shows that x3(t)represents the internal dynamic of the system,which will converge when x1(t)and x2(t)converge to a specific point.In order to derive the integral type backstepping sliding mode control algorithm,system(8)is reformulated into an extended form as_x1¼Àr x1þr x2_x2¼ x3_ x 3¼Àr r x1þr r x2À x3þ_u2À_dð10Þ600 C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–608Definex c ¼x 1cx 2c x 3c 264375¼T À1x 1x 2 x 3264375ð11Þwhere x c is the new state vector and the transformation matrix is defined by T ¼^r 00^r100^r 1264375ð12ÞThen,dynamic Eq.(10)becomes_x 1c _x 2c _x 3c 264375¼0r =^r 00ð^r Àr Þ10r ð^r þr ÞÀ^r ð1þ^r ÞÀð^r þ1Þ264375x 1c x 2c x 3c 264375þ001264375ð_u 2þ_d Þð13ÞNote that r ¼^rþ~r ,where ^r is the nominal value and ~r denotes the parameter uncertainty.If the exact value of r was known,then (13)can be simplified as_x 1c _x 2c _x 3c 264375¼0100010r ðr À1ÞÀðr þ1Þ264375x 1c x 2c x 3c 264375þ001264375ð_u 2þ_d Þð14ÞEq.(14)is of controllable canonical form.However,the exact parameter value can not always be known previously.Therefore,(13)is considered in the following design procedure.Transform (13)in the form of error equations,one can obtain_e1c ¼e 2c þ~r s ð15:a Þ_e2c ¼e 3c þ~r ðx 2dc Àe 2c Þð15:b Þ_e3c ¼½r ð^r þr ÞÀ^r ð1þ^r Þ e 2c Àð^r þ1Þe 3c þg À_u 2À_d ð15:c Þwhere s ¼ðe 2c Àx 2dc Þ=^r,g ¼½^r ð1þ^r ÞÀr ð^r þr Þ x 2dc þð^r þ1Þx 3dc þ_x 3dc and ~r =^r j j (1,x dc =[x 1dc x 2dc x 3dc ]T is the transformed desired vector,i.e.,x dc =T À1x d3.2.Backstepping sliding mode controller design with adaptation lawIn this section,the backstepping design technique is applied to obtain control law of error system (15).The design procedure is divided into three steps shown as follows.Step.1From (15),treat the system state e 2c as an independent input and lete 2c ¼/1ðe 1c Þ¼Àk 1e 1c ;k 1>0:ð16Þwhere /1(e 1c )is defined as a desired virtual stabilizing algorithm for subsystem (15.a).Select a Lyapunov function V 1¼e 21c =2,and then_V 1¼e 1c _e 1c ¼e 1c ½/1ðe 1c Þþ~r s ¼Àk 1e 21c þ~rs e 1c ð17ÞConsider regulation problem (x 2dc ¼_x 1dc ¼0),(17)can be represented as _V 1¼Àk 1ð1þ~r =^r Þe 21c 60with j ~r=^r j <1.It infers that the asymptotical convergence of e 1c can be achieved without the contribution of adaptation law even inthe presence of uncertainty ~r.However,it is not the case for tracking problem.It can be seen that (17)can not guar-antee the asymptotical stability due to the existence of uncertain term ~rs e 1c .In order to overcome this problem,an adaptation algorithm is introduced as follows.Let_^r¼ls e 1c ð18Þwhere l is an adaptation gain which relative to the convergent rate of parameter estimation.Then,choose a Lyapunov function asV 1¼12e 21c þ12l~r 2;ð19ÞC.-C.Peng,C.-L.Chen /Chaos,Solitons and Fractals 37(2008)598–608601and the derivative of(19)is_V 1¼e1c_e1cþ~r_~r=l¼e1c½/1ðe1cÞþ~r s þ~rðÀls e1cÞ=l¼Àk1e21cð20ÞFrom(19)and(20),it implies that V1(t)<V1(0),and thereby the e1c and~r are bounded.Also,the uniform continuity of _V1can be checked by€V 1¼À2k1e1c_e1c¼À2k1e1c½/1ðe1cÞþ~r s ¼2k21e21cÀ2k1e1c~r sTherefore,€V1is bounded and according to the Barbalat’s lemma[21],(which states that if the differentiable function f(t) has afinite limit as t!1,and€fðtÞis bounded,then_fðtÞ!0as t!1),_V1is uniform continuous and it indicates that_V 1!0as t!1.In other words,limt!1e1cðtÞ!0and it implies that limt!1~rðtÞ!0for tracking task.Step.2:In practice,e2c may be different from/1(e1c)for all time.Therefore,define a new error variable z1= e2cÀ/1(e1c).The dynamic of the subsystem(15.a)can be represented as_e1c¼/1ðe1cÞþz1þ~r s:ð21ÞOne canfind that_V1<0if z l in(21)equals to zero.Further,consider the dynamic of z l_z1¼_e2cÀ_/1ðe1cÞ¼e3cþ~rðx2dcÀe2cÞþk1_e1c¼e3cþ~rðx2dcÀe2cÞþk1½/1ðe1cÞþz1þ~r s¼e3cþk1½/1ðe1cÞþz1 þ~r½ðx2dcÀe2cÞþk1s ¼e3cþk1½/1ðe1cÞþz1 þ~r½ðx2dcÀe2cÞþk1ðe2cÀx2dcÞ=^r¼e3cþk1½/1ðe1cÞþz1 ;for k1¼^rð22ÞIn a similar manner,take the state e3c as an independent input of the form/2(e1c,z1c)as the following, e3c¼/2ðe1c;z1Þ¼Àe1cÀðk1þk2Þz1Àk1/1ðe1cÞ;k22R;R>0:ð23ÞSelect a Lyapunov function of the subsystem(e1c,z1)in the form ofV2¼V1þ12z21:ð24ÞBased on the assumption(23),_V2¼e1c_e1cþ~r_~r=lþz1_z1¼e1c½/1ðe1cÞþz1þ~r s À~r s e1cþz1½e3cþk1ð/1ðe1cÞþz1Þ¼e1c½/1ðe1cÞþz1þ~r s À~r s e1cþz1½/2ðe1c;z1Þþk1ð/1ðe1cÞþz1Þ¼e1c½/1ðe1cÞþz1þ~r s À~r s e1cþz1½Àe1cÀðk1þk2Þz1Àk1/1ðe1cÞþk1ð/1ðe1cÞþz1Þ ¼Àk1e21c Àk2z2160ð25ÞAccording to Barbalat’s lemma,the subsystem(e1c,z1)is asymptotically stable.602 C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–608C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–608603 Step.3Following steps1–2,one canfind that if(23)came into effect,then the desired behavior of the subsystem(e1c, z1)can be achieved.In other words,the asymptotically stability of the error system can be guaranteed.Thus, according to the requirement of Lyapunov stability(25),a sliding manifold is selected as follows s¼e3cÀ/2ðe1c;z1Þ¼e3cþe1cþðk1þk2Þz1þk1/1ðe1cÞ¼e3cþe1cþðk1þk2Þðe2cÀ/1ðe1cÞÞþk1/1ðe1cÞ¼e3cþe1cþðk1þk2Þe2cÀk2/1ðe1cÞ¼e3cþðk1þk2Þe2cþð1þk1k2Þe1cð26ÞEq.(26)shows that once the sliding mode occurs(i.e.,s=0),the settling time of the error responses can be determine by assigning the corresponding eigen-values in the sliding surface.In the absence of uncertainty and disturbance_d,the corresponding equivalent control force_u2eq can be obtained by _s¼0,that is_u2eq¼^rð^rÀ1Þe2cÀð^rþ1Þe3cþð1þk1k2Þe2cþðk1þk2Þe3cþ^g:ð27Þwhere^g¼^rð1À^rÞx2dcþð^rþ1Þx3dcþ_x3dc.Regarding the enhancement of the system robustness such that system states stay on the sliding surface even in the pres-ence of model uncertainties and external disturbances,a switching control action is integrated as follows_u2¼_u2eqþw sgnðsÞð28ÞChoose a Lyapunov function V s=s2/2.Then,the reaching condition can be guaranteed for w>j D bðe c;tÞjþj_dðtÞj, where j D bðe c;tÞj¼j^rð~rþ~rÞþ~r rþ~rðk1þk2Þðx dc2Àe2cÞþ~rð1þk1k2Þsþ~g j is bounded(i.e.,j D b(e c,t)j6a).Hence,_V s ¼s_s¼s½Àw sgnðsÞÀD bðe c;tÞÀ_dðtÞ 6Às½w sgnðsÞþj D bðe c;tÞjþj_dðtÞj 6Àj s j wÀj D bðe c;tÞjÀj_dðtÞjÂÃ60;ð29ÞEq.(29)confirms the existence of sliding mode dynamics.Therefore,the system is globally asymptotically stable.From (27)and(28),an integral type control effort for the Lorenz chaotic system can be represented asu¼u1þu2¼x1x3þZ t_u2eqþw sgnðsÞÂÃdt¼x1x3þZ t^rð^rÀ1Þe2cÀð^rþ1Þe3cþð1þk1k2Þe2cþðk1þk2Þe3cþ^gþw sgnðsÞ½ dt:ð30Þ604 C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–608C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–6086054.Numerical simulationsIn this section,numerical studies of the Lorenz system subjected to disturbance(7)are carried out with initial con-ditions at(x1(0),x2(0),x3(0))=(10,10,10)as shown in Fig.2(a)–(b).4.1.Regulation problemConsider a regulation problem for the specific point,x d=0(i.e.the equilibrium point(0,0,0)).The disturbance term is selected as d(t)=0.5sin(0.5x t)with x=2p.The control gains k1¼^r with^rð0Þ¼9and k2=15are applied for all cases.The nominal value of r is performed by^r¼26and w=150is chosen to satisfy the inequality condition(26). Using the proposed control algorithm,the simulation results of regulation problem by SMC with l=0are shown in Figs.3and4,where the control input is active at t=10.Fig.3shows that irregular state responses converge to the set point asymptotically even in the presence of model uncertainties and disturbances.Fig.4(a)and(b)are the cor-responding responses of control input and sliding surface,respectively.4.2.Tracking problemHowever,regarding the tracking problem,asymptotically stability can not be guaranteed if there exists uncertainty in r(as mentioned in(17)).Therefore,the adaptation law must acts in the tracking task.Let the desired vector to be x d¼Tx dc¼T½kðtÞ_kðtÞ€kðtÞ T;where k¼asinðx tÞwith a=0.4.The control gains are selected as the same values used in regulation problem.The proposed SMC acts at t=5and the adaptation law acts at t=15with l=200.Fig.5shows the trajectory of the controlled Lorenz system has been forced to the assigned orbit.Further,from Fig.6(a)–(b),it can be seen that states x1(t)and x2(t)track the desired value while the control acts.The corresponding phase portrait of x1(t)Àx2(t)is illustrated in Fig.7.It indicates that system trajectory approach to the desired orbit and steer to it when adaptation scheme is applied.Examining the tracking performance,from Fig.8(a),one canfind that the asymptotical convergence can not be reached(before t=15).However,the tracking errors converge to zero owing to the effort of adaptation law(after t=15).In other words,the exact parameter value(r=10)has been estimated accurately as shown in Fig.9.From(9),the internal dynamics belongs to a stable system,but it is subjected to a perturbation by x1(t)x2(t).However,the states x1(t)and x2(t)have been controlled to track a bounded orbit such that the time response of x3(t)is also bounded(which can be proven by bound-input bound-output)as illustrated in Fig.10.The oscillated boundary of the internal state is dominated by the perturbation term x1(t)x2(t),which means that the larger the j x1(t)x2(t)j,the larger the boundary j x3(t)j.As illustrated in Fig.11(a),the proposed synthesized robust controller does not induce chattering behavior.Fig.11(b)shows that the sliding mode dynamics is suppressed to zero as the SMC is activated.606 C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–608C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–6086075.ConclusionsIn this paper,a robust control scheme for perturbed Lorenz chaos is developed.Based on the Lyapunov stability theory,the controller design was integrated with an adaptation algorithm and the SMC via utilizing backstepping design scheme.The SMC offers the robustness to model uncertainties and external disturbances.The adaptation law estimates the system parameter such that the asymptotical convergence of tracking error can be guaranteed.Moreover, under the proposed control algorithm,the convergent rate of the error responses can be determined by selecting the corresponding eigenvalues in the sliding surface that is generated by Lyapunov stability requirements.The advantages of this method can be summarized as follows:(a)it is a systematic procedure for chaos suppression;(b)it can be applied to a variety of chaotic systems whether it contains uncertainties or not;(c)the proposed controller is robust to external disturbance;(d)it is a chattering free SMC law.AcknowledgementPart of the work was supported by the National Science Council,Taiwan,under the grant No.NSC94-2212-E006-062.References[1]Ott E,Grebogi C,Yorke JA.Controlling chaos.Phys Rev Lett1990;64:1196–9.[2]Vincent TL,Yu J.Control of a chaotic system.Dynam Control1991;1:35–52.[3]Luce R,Kernevez JP.Controllability of Lorenz equation.Int Series Nume Math1991;97:257.[4]Yeap TH,Ahmed NU.Feedback control of chaotic systems.Dynam Control1994;4:97–114.[5]Gallegos JA.Nonlinear regulation of a Lorenz system by feedback linearization techniques.Dynam Control1994;4:277–98.[6]Fuh CC,Tung PC.Controlling Chaos using differential geometric method.Phys Rev Lett1995;75:2952–5.[7]Zeng Y,Singh SN.Adaptive control of chaos in Lorenz system.Dynam Control1997;7:143–54.[8]Bernardo MD.An adaptive approach to the control and synchronization of continuous-time chaotic systems.Int J BifurcationChaos1996;6:557–68.[9]Feki M.An adaptive feedback control of linearizable chaotic systems.Chaos,Solitons&Fractals2003;15:883–90.[10]Wu CW,Yang T,Chua LO.On adaptive synchronization and control of nonlinear dynamical systems.Int J Bifurcat Chaos1996;6:455–71.[11]Suykens JAK,Curran PF,Vandewalle J.Robust Nonlinear H1synchronization of chaotic Lur’e systems.IEEE Trans CircuitsSyst I1997;44(10):891–904.[12]Chen G,Dong X.From chaos to order:methodologies,perspectives and applications.Singapore:World Scientific;1998.608 C.-C.Peng,C.-L.Chen/Chaos,Solitons and Fractals37(2008)598–608[13]Yan JJ.Design of robust controllers for uncertain chaotic systems with nonlinear inputs.Chaos,Solitons&Fractals2004;19:541–7.[14]Yau HT,Chen CK,Chen CL.Sliding mode control of chaotic system with uncertainties.Int J Bifurcat Chaos2000;10:1139–47.[15]Yang SK,Chen CL,Yau HT.Control of chaos in lorenz system.Chaos,Solitons&Fractals2002;13:767–80.[16]Jang MJ,Chen CL,Tsao YM.Sliding mode control for active magnetic bearing system withflexible rotor.J Frankl Inst Eng ApplMath2005;342:401–19.[17]Lu J,Zhang S.Controlling Chen’s chaotic attractor using backstepping design based on parameters identification.Phys Lett A2001;286:145–9.[18]Park JH.Synchronization of Genesio chaotic system via backstepping approach.Chaos,Solitons&Fractals2006;27:1369–75.[19]Bowong S,Moukam Kakmeni FM.Chaos control of uncertain chaotic systems via backstepping approach.ASME J VibratAcoust2006;128:21–7.[20]Yassen MT.Chaos control of chaotic dynamical systems using backstepping design.Chaos,Solitons&Fractals2006;27:537–48.[21]Slotine JE,Li W.Applied nonlinear control.New Jersey:Prentice-Hall;1991.。