CM402-L常见报警及处理方法
- 格式:ppt
- 大小:29.10 MB
- 文档页数:17
火灾自动报警系统常见故障及处理方法火灾自动报警系统常见故障有:火灾探测器、通讯、主电、备电等故障,故障发生时,可先按消音键中止故障报警声,然后进行排除。
如果是探测器、模快或火灾显示盘等外控设备发生故障时,可暂时将其屏蔽隔离,待修复后再取消屏蔽隔离,恢复系统正常。
一、常见故障及处理方法1.1火灾探测器常见故障(1)故障现象:火灾报警控制器发出故障报警,故障指示灯亮、打印机打印探测器故障类型、时间、部位等。
(2)故障原因:探测器与底座脱落、接触不良;报警总线与底座接触不良;报警总线开路或接地性能不良造成短路;探测器本身损坏;探测器接口板故障。
(3)排除方法:重新拧紧探测器或增大底座与探测器卡簧的接触面积;重新压接总线,使之与底座有良好接触;查出有故障的总线位置,予以更换;更换探测器;维修或更换接口板。
1.2主电源常见故障(1)故障现象:火灾报警控制器发出故障报警,主电源故障灯亮,打印机打印主电故障、时间。
(2)故障原因:市电停电;电源线接触不良;主电熔断丝熔断等。
(3)排除方法:连续供停电8h时应关机,主电正常后再开机;重新接主电源线,或使用烙铁焊接牢固;更换熔断丝或保险管。
1.3备用电源常见故障(1)故障现象:火灾报警控制器发出故障报警、备用电源故障灯亮,打印机打印备电故障、时间。
(2)故障原因:备用电源损坏或电压不足;备用电池接线接触不良;熔断丝熔断等。
(3)排除方法:开机充电24h后,备电仍报故障,更换备用蓄电池;用烙铁焊接备电的连接线,使备电与主机良好接触;更换熔断丝或保险管。
1.4通讯常见故障(1)故障现象:火灾报警控制器发出故障报警,通讯故障灯亮,打印机打印通讯故障、时间。
(2)故障原因:区域报警控制器或火灾显示盘损坏或未通电、开机;通讯接口板损坏;通讯线路短路、开路或接地性能不良造成短路。
(3)排除方法:更换设备,使设备供电正常,开警启报警控制器;检查区域报警控制器与集中报警控制器的通讯线路,若存在开路、短路、接地接触不良等故障,更换线路;检查区域报警控制器与集中报警控制器的通讯板,若存在故障,维修或更换通讯板;若因为探测器或模块等设备造成通讯故障,更换或维修相应设备。
火灾自动报警系统常见故障分析及排除方法为使火灾报警系统能更好的服务与联网客户,下面简要分析一下主要原因及其排除方法。
(一)常见故障火灾自动报警系统常见故障类型主要有:探测器故障、通讯故障、主电源故障、备电故障等。
故障发生时,可按消音键中止故障报警声,然后进行故障排除。
当外部设备(探测器、模块)发生故障时,可将它给离掉,待修理更换后,再利用取消隔离功能将设备恢复。
(二)常见致命故障产品众多且设计思想各异,互不兼容,施工手段、方法高低参差不齐,产品设计施工、管理技术相对滞后,这就会产生许多较大甚至是致命的故障。
1、强电串入火灾报警及联动控制系统由于火灾报警及联动控制系统在布线上要求单独布置,故强弱电在布线上相串的可能性不大。
但如果在强弱电交接的设备接口处,如在卷帘门、水泵、风机等需弱电控制弱电的情况下,则容易发生强电的串入。
2、短路或接地而引起系统主机损坏火灾报警及联动控制系统二总线传输的原理是采用信号传输与电源共享二总线,信号调制到电源线上发出,外围设备(如探测器、各种模块)接收主机发出的电压信号。
当外围设备收到主机发送的地址与外围设备本身的地址相符时,外围设备就将本身的信息反馈回主机。
外围设备向主机发送信息多采用电流信号,探测器内通信芯片控制总线间电阻值的变化,从而引起总线电流的变化。
如系统二总线短路或接地,则主机收不到探测器的报警信号,严重者将烧毁主机接口。
火灾报警及联动控制系统应远离水系统、空调管道及风道。
由于建筑物内给水系统并不总是不漏水的理想情况,空调系统也可能保温做的不理想,冷凝水经常会侵入探测器等火灾报警控制系统,从而引起短路或接地,最后烧坏主机或是大面积的产生误报。
3、不可抗力造成对火灾报警及联动控制系统毁灭性打击此种情况多指雷击和台风等,如因遭受雷击造成烧毁主CPU板(控制处理部件)及回路板的事故,台风将主机等设备群淹没等。
系统集成单位应尽量将系统分成几个相对独立的小系统,在其互联部分采取较严格的保护手段,这样才能将此类情况产生的损失控制在最小。
火灾报警系统的常见故障及处理措施是什么火灾报警系统是保障生命和财产安全的重要设施,然而在实际使用过程中,可能会出现各种故障。
了解这些常见故障并掌握相应的处理措施,对于确保火灾报警系统的正常运行至关重要。
一、火灾探测器故障1、探测器污染探测器长期暴露在灰尘、油污等环境中,可能会导致其感应性能下降。
表现为误报或不报。
处理措施:定期对探测器进行清洁,使用干净的软布轻轻擦拭表面。
对于严重污染的探测器,应更换新的。
2、探测器损坏可能由于物理撞击、老化等原因造成探测器内部元件损坏。
处理办法:及时更换损坏的探测器,确保其正常工作。
3、探测器安装位置不当探测器安装位置距离火源过远或被障碍物遮挡,影响其探测效果。
解决方法:按照规范要求重新调整探测器的安装位置,确保能够及时准确地探测到火灾信号。
二、报警控制器故障1、电源故障电源供应不稳定、电源线接触不良或电源模块损坏等,可能导致报警控制器无法正常工作。
处理措施:检查电源线路,确保接触良好;若电源模块损坏,需更换新的电源模块。
2、通讯故障报警控制器与探测器、其他设备之间的通讯出现问题,数据传输中断。
解决办法:检查通讯线路,排除线路故障;重新设置通讯参数,确保通讯正常。
3、主板故障主板上的元件损坏、老化等,影响控制器的整体性能。
处理方法:更换主板或对损坏的元件进行维修。
三、线路故障1、线路短路线路中的两根导线短接在一起,导致电流过大,可能会烧毁设备。
处理措施:使用万用表等工具查找短路点,将短路部分的线路修复或更换。
2、线路断路线路断开,导致信号无法传输。
解决办法:逐段检查线路,找到断路点并进行连接。
3、线路接地线路与地之间出现不正常的连接,影响信号传输。
处理方法:排查接地故障点,修复绝缘破损处。
四、系统误报1、环境因素干扰如电磁干扰、温度过高或过低、湿度较大等。
处理措施:改善系统安装环境,减少干扰因素;对系统进行抗干扰处理。
2、设备故障引起的误报探测器、控制器等设备本身存在故障导致误报。
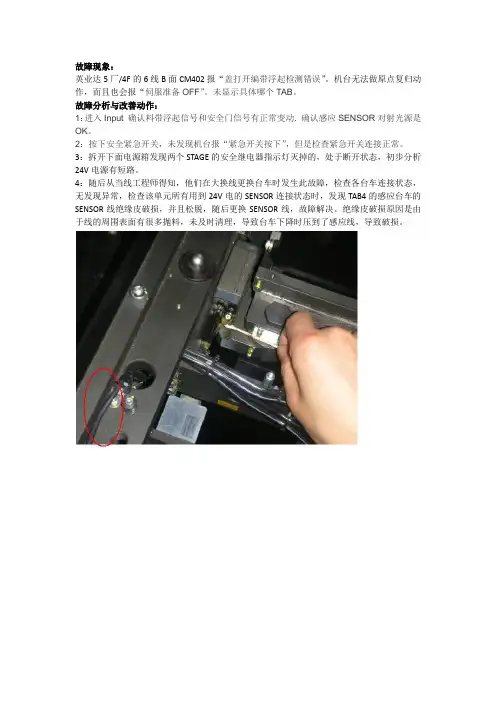
故障现象:
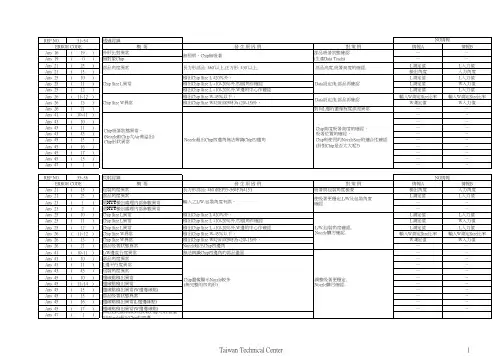
英业达5厂/4F的6线B面CM402报“盖打开编带浮起检测错误”。
机台无法做原点复归动作,而且也会报“伺服准备OFF”。
未显示具体哪个TAB。
故障分析与改善动作:
1:进入Input 确认料带浮起信号和安全门信号有正常变动. 确认感应SENSOR对射光源是OK。
2:按下安全紧急开关,未发现机台报“紧急开关按下”,但是检查紧急开关连接正常。
3:拆开下面电源箱发现两个STAGE的安全继电器指示灯灭掉的,处于断开状态,初步分析24V电源有短路。
4:随后从当线工程师得知,他们在大换线更换台车时发生此故障,检查各台车连接状态,无发现异常,检查该单元所有用到24V电的SENSOR连接状态时,发现TAB4的感应台车的SENSOR线绝缘皮破损,并且松脱,随后更换SENSOR线,故障解决。
绝缘皮破损原因是由于线的周围表面有很多抛料,未及时清理,导致台车下降时压到了感应线,导致破损。
CM402不良吸头问题(不良臂退避位置错误)我们这里有一台CM402泛用机3-3 2号头真空电磁阀不良,就跳过后生产,可是跳过后生产只要一报警就会出现不良臂退避位置错误,这是怎么回事啊,不管报什么警都会出现这种情况,请问是怎么回事,是那里可以设置的不。
机器参数里面能不能设置啊、?1是你跳掉的那个头没到原点位置。
2把跳的那个头手动顶到最高点就好了。
3我这是两组CM402,在2-4封了3号头,当出现不良臂退避位置错误后,怎么都开不了,开了还报“不良臂退避位置错误”,先在机器设定中将封的头解了,后在机器调整中原点复归,后再把不良头封了,可以开机器了。
问题也解决。
CM402设备吸头异常故障公司有一台CM402设备再生产时总报TABLE3头异常xy轴异常R=2POS异常。
把2POS头BAD掉就报其他的轴异常!其中更换过轴板卡效果没有改善!哪位高人有好的见解,请赐教!是那根工作头上的大线坏了,换一根就好了。
24V的那根粗线。
cm402 异常本公司有一台CM402生产中经常报警: 吸头异常, 代码:9564 信息:发生位置A工作台后(TABLE 1) X 轴POS=R,回主画面后继续生产又可以,但间隔没多久又回出现检查几个方面:1 θ轴电机不好,用六角匙转下θ轴电机是否过紧,查看停止信息中的各TBL轴信息可知2 θ轴皮带久后过脏卡住报过载3 Z轴电机NG4 CABLE线接触不良以上各电机用三年后都有可能出问题的,轴动作中检查头部CABLE线有没有接触不良的,或插拔下电缆,检查下头部板卡,和机箱中的SSR卡有无异常。
CABLE线已经更换,但是还会出现。
检查一下θ轴电机,转动时是否有卡的现象,我们这都换了好几个了,都是吸头异常,拆开马达后发现转子上吸附了很多铁锈之类的东西,转一会就转不动了我司前段时间CM402也经常报“吸头异常”错误信息看不出根本原因在哪里,从轴信息里分析出是θ轴马达NG,更换θ轴马达后OK.CM402报奇怪错误我说说原因和处理方法,报此错误的原因是PCB板有孔或缝刚好在SENSOR感应处,造成感应不良,特别是机器因故障回主画又重新开始生产,最容易报此错误,处理方法是把没有传到感应SENSOR的PCB推到感应位置再开始就OK检查一下A 工作台与B工作台中间,应该是机器返回主画面后重新开机时PCB会做一下退避动作后未复位,导致感应器未检测到PCB.从而报此错。
火灾自动报警系统常见故障及处理方法
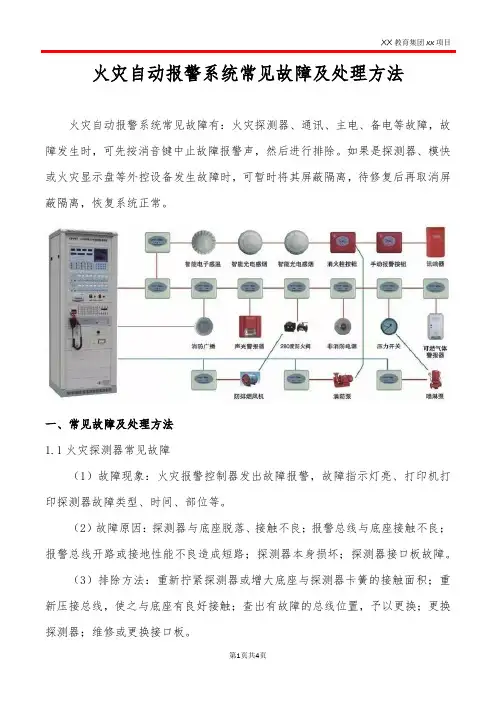
1、火灾自动报警系统构成
火灾自动报警系统由火灾报警控制器、探测器、手动报警按钮、消火栓按钮、声光报警器、自动灭火系统(气体灭火系统、高压细水雾灭火系统)等组成。
2、系统完成的主要功能
火灾发生时,探测器将火灾信号传输到报警控制器,通过声光信号表现出来,并在控制面板上显示火灾发生的部位,从而达到预报火警的目的。
同时,也可以通过手动报警按钮来完成手动报警的功能。
3、系统容易出现的问题、产生的原因、简单的处理方法
(1)探测器误报警,探测器故障报警。
原因:探测器灵敏度选择不合理,环境湿度过大,风速过大,粉尘过大,机械震动,探测器使用时间过长,元器件参数下降等。
处理方法:根据安装环境选择适当的灵敏度的探测器,安装时应避开风口及风速较大的通道,定期检查、清理,根据运行情况清洗和更换探测器。
(2)手动按钮误报警,手动按钮故障报警。
原因:按钮使用时间过长,设备参数下降,或按钮人为损坏。
处理方法:定期检查,损坏的及时更换,以免影响系统运行。
(3)报警控制器故障。
原因:机械本身器件损坏报故障或外接探测器、手动按钮问题引起报警控制器报故障、报火警。
处理方法:用万用表或自身诊断程序判断检查机器本身,排除故
障,或按1.2处理方法,检查故障是否由外界引起。
(4)线路故障。
原因:绝缘层损坏,接头松动,环境湿度过大,造成绝缘下降。
处理方法:用检测仪表检查绝缘程度,检查接头情况,接线时彩用焊接、塑封等工艺。
关于PT200供料角度(style angle)规律的探讨1,对于其它的机器和系统,零件的供料角度是以零件原始放置的状态为0度。
关于PT200系统,有一个很特别的地方,就是角度问题,它并不管零件在供料器中的放置状态,而是固定的认为某个方向为0度方向。
因此,在PT200中,电阻电容的供料角度是90度。
可能有很多人会由此推断,认为PT中的方向与其它系统中的方向相差90度,但实际上并不是所有的情况下都是相差90度。
经过思考和分析,我发现了PT在供料角度上的一些特点。
写下来大家讨论。
用实际的经验和最直观的视觉看法,电阻电容的供料横着的,因为我们面对一个长方形的物体(此处的物休即贴片元件,都是比较小的。
)会以为横着看是它的初始方向(0度),如果它竖着,会认为它是被旋转了的,为什么会有这种潜意识呢,因为我们的眼睛是左边一个,右边一个,而不是上边一个下边一个,我们之所以会认为横着的方向是初始角度,是为了看的方便,看的时候不必要上下打量,这是一种视觉习惯。
为什么以前的书是竖着写的,现在改为横着写了?也是为了适应视觉习惯。
类似的例子太多了,就不再举了。
为了便于说明,我把面对较长的一条边的方向称为横着,把面对较短的一条边的方向称为竖着。
在人们的视觉习惯中,特别是对于小物体,横着是初始方向。
为什么小鬼子要把竖着的方向定为0度,而不顺着人们的习惯把横着的方向定为0度呢?是不是鬼子的眼睛是上边一个,下边一个?肯定不是,这样的人可能也没有。
当我们拿起一盘电阻,也只能以横横着的方向去看,这样才能看清上面的数字。
当电阻装在飞达上,我们也是以横着的方向来看。
今天我看到标记IC方向的小圆点时,将所有的贴片元件联系起来一想,找到了答案。
我认为鬼子定义供料角度是以IC的方向为基准的,并且其它的料也可以遵守这个标准。
经过对各种元件供料角度的考查,我发现PT关于零件供料角度的定义符合下面三点,当然鬼子是不是根据这三点来定义的也未可知。
但是用这三点可以解释PT的供料角度现象。
数控机床常见报警故障及其维护保养随着现代加工技术的不断发展,数控机床已经成为了制造业中必不可少的一部分。
然而,在数控机床的工作过程中,常会出现各种报警故障,这些故障不仅会影响机床的生产效率,还会导致机床设备损坏,严重的甚至会导致一定的人身安全问题。
因此,对于数控机床的常见报警故障及其维护保养是非常必要的。
本文将会介绍数控机床常见报警故障及其维护保养的相关知识,帮助读者更好地了解数控机床的工作流程,识别并解决常见故障。
一、数控机床常见报警故障的分类(一)伺服报警故障伺服报警故障主要包括机床伺服系统出现失误、系统电缆出现短路或断路、伺服电机故障等问题。
这些问题一般会通过报警灯、控制面板或实时监控数据提示的方式来告知操作人员。
对于伺服报警故障,我们通常需要检查控制面板的显示信息,确认报警灯是否亮起,通过判断故障代码来定位故障原因。
一般可以通过重启机床、重新设置伺服参数、更换电缆等解决。
(二)数控系统报警故障数控系统报警故障主要表现为显示屏上出现系统故障、无法启动、程序错误、存储设备故障等情况。
对于这些报警故障,我们需要确认故障代码,据此进一步检查其后台系统状况,对于一些常规的错误可以尝试重新载入程序。
如果故障情况较为复杂,则需要联系厂家或相关人员进行处理。
(三)机械传动系统故障报警机械传动系统故障报警主要表现为机床减速、怠速等原因造成的机械传动系统振动、噪音比较大;零部件的磨损及缺陷等导致的轴承胶合,轴承锈蚀、轴承碰撞等问题。
在这些情况下,我们通常需要检查机械系统的各项设备,并进行正确的维护、保养。
如果设备已经出现故障,则应及时进行修理或更换。
二、数控机床的日常维护保养对于数控机床,做好日常维护保养工作是非常重要的。
只有做到保养细致、规范才能确保机床设备的正常使用,提高生产效率。
以下是数控机床常见的日常维护保养工作:(一)清洁维护机床设备的工作过程中需要大量的切削液与废渣。
长时间的使用会导致机床上积存着很多的切屑等杂物,造成部分机器部件的不协调、堵塞等问题。
1.适用本作业标准适用于松下机器会社(株)生产的模块型高速多机能CHIP MOUNTER CM402-L的操作。
2.装置概要利用高速复合置件头系统,高速搭载CHIP部品的模块型高速CHIP MOUNTER。
利用部品认识系统、校准机能以及高速低振控制、实现部品的高速高精度实装。
3.全体构成图3.1.全体图图13.2.操作面板左上显示3.3.触摸面板①操作界面②非常停止按钮(2个位置)图2操作员模式生产中3.4.功能键说明3.5.功能键说明操作员工程员 生产生产设定生产情報数据修正FILE 操作机器参数机器調整 机器設定4.运转准备CM402-L连接电源之前、要确认PT200(程序状态)的启动,以及空气的供给状态4.1.电源投入前确认4.1.1装置的伺服ON/OFF开关返回OFF(图5)。
还有、确认是OFF状态。
4.1.2装置内、工具・支撑PIN 等异物确认(图6)。
4.1.3CHIP 品排出BOX的清扫(图7)。
4.1.4切割TAPE BOX的清扫(图8)。
4.1.5非常停止开关的解除(图9)。
4.2.电源投入4.2.1电源开关返回ON。
(图10)4.2.2如图10,3分钟左右主菜单的初期画面启动各操作不用功能键,用触摸画面来完成。
图11电源开关(图10)4.2.3操作面板的SERVO开关到ON。
4.2.4各装置的归零动作,是在进行各操作的时候,有必要进行复归原点的动作的场合下进行画面切换,复归原点5.生产准备5.1.拆卸吸嘴 5.1.1高速吸嘴A 、主菜单的[生产设定」键按住、出现生产设定菜单4.2.5画面成为原点复归画面4.2.6原点复归完了的轴、由OK显示、 画面就切换到下一操作画面 4.2.7下功能键的返回键按下去,又返回主菜单。
5.1.2异形吸嘴A 、点击主菜单的[工程」键、出现密码输入界面。
B 、按一下吸嘴設定。
C 、按住操作面板的UNLOCK开关、再点击吸嘴拆卸键。
D 、自动的对拆卸的吸嘴部分进行确认后再进行拆卸。
1,C M402识别零件时,为什么要在相机上扫动两次?那个TABLE的零件REF 值为82 5157 69 71 73 171 共7种料。
1. 扫动两次有两个原因:1. 如果HEAD1/5 2/6 3/7 4/8 采用不同的识别方式(DIRECT/SHADOW) ,由于1/5是同时扫描所以要求识别方式一样,否则要用两种识别方式的话就扫两次.2.如果HEAD1/5 2/6 3/7 4/8 识别方式相同但是灯光VALUE 不同,也要扫两次,原因同样一次不能提供两种灯光2. 个人经验认为,CM402这样的机型不论是一次扫描还是同时吸着都是有一定的条件的。
要实现一次扫描肯定得考虑到元件光线,高度,长宽还有速度什么的,只是不知具体数值是多少;还有同时吸取,也要考虑到FEEDER大小,spindle pitch,元件高度,吸取偏移等等一系列条件,只是不知到底这个范围是多少,还请业界的各位高手不吝赐教!2,C M402-C用1001吸取L:3.2 W:1.6 T:0.45/L:2.0 W:1.2 T:0.45 零件时频繁报实装错误黑屏,mount Gap:0.3,pickup Gap:0,贴装.识别均为高速,Nozzle PF:-95,真空检测Sensor Unuse. 真空手动检测值为-91.1. 校正吸着中心﹐察看Nozzle型号是否选用合理﹒实在不行﹒把真空检测关闭﹒就OK.2. 报错的时候到底是否已经装着了呢?还是在MOUNT 前报错?在MOUNT 前报错?--表示RECOG 后零件移动中MISS,MOUNT后报错---一是实际已经MOUNT 但NOZZLE 真空仍检测存在所以报错.二是MOUNT 前零件MISS.原理就是这样,请自行分析下.基本上原因就是PICKUP 的不好,漏气,MOUNT HEIGHT 不对,当然可能是真空检测气阀有问题,在HEAD 后上方白色东东,交换测试下.另外可以检查生产情报中MISS HISTORY,看当时的真空值.是同一HEAD 吗?还是其他HEAD 都会发生?3. 没有1002 NOZZLE 吗? 用试下,另外可以将PT 中MISS 检测值写小些, 如标准是-5 (PM 项) 写成-7/ -104. L:3.2 W:1.6 T:0.45/L:2.0 W:1.2 T:0.45 用1002Nozzle是不是有点过分,我现在只有用一个1001吸嘴,每个头都有试过,我也知道这种Size的Chip在泛用机打是有点不合理,但考虑效率没的办法。
吸嘴脱落如何处理1,我这边的设备出现吸嘴脱落比较频繁,请问解决办法?我做过的动作有:1,对吸嘴真空检测,清扫过滤器,显示数字都OK;2,对左右两边的吸嘴对调生产还是NG。
查找说明书,给的说明是:1,在吸着或实装中吸嘴脱落;2,真空传感器堵塞;3,真空传感器故障。
我做的动作可以排除一二两种情况,我想说如果真空过滤器真的故障,真空检测能在显示的范围之内吗?求教,我该怎么办,或者有别的地方需要确认检查的没有?检查固定吸嘴的杆上的小铁片是不是变形了。
现在把真空传感器给更换了,问题已经解决.但是个人认为,不一定非要换真空传感器,做真空传感器真空检查,和旁边的真空压差不多大小,都在-10以下一点,但是这个头上贴片时候所使用的吸嘴是120真空感应器应该没有什么问题,主要是使用120吸嘴的时候与其他真空值不一样,再加上你的Holder内过滤网可能有破损更加造成真空值的误差,建议更换Holder内过滤网,使用新的过滤棉。
补充一点,头上真空传感器旁的那根真空气管可关注下,表面上看是好的,实际有可能漏气,是表面看不出来的。
换下看状态怎样?希能给予你帮助!上面的老兄,原因有以下几个:1,检测真空不足,不知你是否观查过吸嘴在检真空时如果不达标就会一直向下直到极限,有时会过缺口的,这也就是脱落的原因。
2,HOLDER内的弹簧的弹力不足也会导至脱落,这是我亲眼看过的。
3,HOLDER的保养做的不好。
请各位参考。
CM吸嘴反光面破损或者脱落,如何处理2,因为刚接触CM设备,请问CM吸嘴反光面破损或者脱落,如何处理!清洁吸嘴应注意些什么?保养时一定要将Nozzle分开放,不能堆成一堆,包括取下和安装的过程中,一定不能让Nozzle的嘴去碰到反光面。
还有你的保养溶济一定不能粘在反光面上太久,一定要按时擦干净。
对于脱落是产家的质量问题,你可以要求更换,你也可以自己用胶水粘,粘的时候不能清除反光板后面的黑色物体!除0201的吸嘴(即205、206)比较“娇贵”以外,其它的只要不用腐蚀性的溶剂清洁就好啦,当然也不能有物理损伤。