基于MatlabR2011b的卫星轨道计算
- 格式:pdf
- 大小:315.99 KB
- 文档页数:3
用M A T L A B计算G P S 卫星位置-最新文档资料用MATLAB计算GPS卫星位置GPS定位的基本原理简单来说就是在WGS-84空间直角坐标系中,确定未知点与GPS卫星的空间几何关系。
因此利用GPS 进行导航和测量时,卫星是作为位置已知的高空观测目标。
那么如何精确快速的解算出卫星在空间运行的轨迹即其轨道是实现未知点快速定位的关键。
1 标准格式RINEX格式简述在进行GPS数据处理时,由于接收机出自于不同厂家,所以厂家设计的数据格式也是五花八门的,但是在实际中,很多时候需要把来自不同型号的接收机的数据放在一块进行处理,这就需要数据格式的统一,为了解决这种矛盾,RINEX(英文全称为:The Receiver Independent Exchange Format)格式则应运而生,该格式存储数据的类型是文本文件,数据记录格式是独立于接收机的出自厂家和具体型号的。
由此可见,其特点是:由于是通用格式,所以可将不同型号接收机收集的数据进行统一处理,并且大多数大型数据处理软件都能够识别处理,此外也适用于多种型号的接收机联合作业,通用性很强。
RINEX标准文件里不是单一的一个文件,而是包括如下几种类型的文件[1]。
(1)观测数据文件(ssssdddf.yyo),记录的是GPS观测值信息,(OBServation data,简写OBS,为接收机记录的伪距、相位观测值;O文件,如XG012191.10O)。
(2)导航电文文件(ssssdddf.yyn),记录的是GPS卫星星历信息(NAVavigation data,简写NAV,记录实时发布的广播星历;N文件,如XG012191.10N)。
(3)气象数据文件(ssssdddf.yym),主要是在测站处所测定的气象数据(METerological data,简写MET,记录气象仪器观测的温、压、湿度状况;M文件,如XG012191.10M)。
(4)GLONASS导航电文文件(ssssdddf.yyg),记录的是地球同步卫星的导航电文。
matlab星下点轨迹如何在MATLAB中绘制点轨迹MATLAB作为一种强大的数学软件,在数据可视化和绘图方面具有很高的效率和灵活性。
绘制点轨迹是MATLAB中常用的功能之一,可以帮助我们更好地理解数据的走向和趋势。
本文将详细介绍如何使用MATLAB来绘制点轨迹。
第一步:准备数据在MATLAB中,要绘制点轨迹首先需要准备数据。
数据可以是一个向量、一个矩阵或者一个数据集。
这些数据中的每个元素都表示坐标系中的一个点,这些点的连接顺序将构成点轨迹。
举例来说,我们准备了一组x和y坐标的数据,将它们存储在两个向量中:x = [1, 2, 3, 4, 5];y = [1, 4, 9, 16, 25];第二步:创建坐标系在绘制点轨迹之前,需要先创建一个坐标系。
坐标系提供了一个平面空间,用于确定点的位置。
可以通过在MATLAB中使用plot函数创建一个简单的二维坐标系。
plot 函数接受x和y坐标作为输入,并将它们绘制在一个两维图形中。
继续使用前面的例子,我们可以创建一个二维坐标系,代码如下:plot(x, y);运行上述代码,将创建一个二维坐标系,并在图形中显示出我们准备的点。
第三步:添加点轨迹我们的目标是绘制这些点的轨迹,将它们连接起来,形成一个曲线。
为了实现这个目标,我们可以使用plot函数的hold on和hold off功能。
hold on表示继续在同一个图形中绘制新的元素,而不是清除前面的图形。
hold off则表示绘制完成后停止在同一个图形中继续绘制新元素。
在继续之前,我们需要先使用hold on创建一个新的图形。
代码如下:hold on;接下来,我们使用plot函数绘制点轨迹。
代码如下:plot(x, y, 'o-');这里,我们将之前准备的点坐标传递给plot函数,同时使用'o-'参数来指定点轨迹以点和直线方式连接。
运行上述代码,可以看到点轨迹已经绘制在图形中。
matlab卫星轨道计算Matlab卫星轨道计算引言:卫星轨道计算是航天工程中的重要环节,可以帮助我们准确预测卫星的轨道位置和运动状态。
在Matlab中,我们可以利用其强大的数学计算能力和图形绘制功能,进行卫星轨道计算和可视化分析。
本文将介绍如何使用Matlab进行卫星轨道计算,以及一些常用的计算方法和技巧。
一、卫星轨道类型及基本概念卫星轨道可以分为地心轨道和非地心轨道两种类型。
地心轨道包括圆形轨道和椭圆轨道,而非地心轨道则包括近地点轨道和远地点轨道等。
在进行卫星轨道计算之前,我们需要了解一些基本概念,如轨道倾角、轨道升交点经度等。
二、Matlab中的卫星轨道计算函数Matlab提供了一些常用的卫星轨道计算函数,如kepler.m、eci2aer.m和eci2lla.m等。
其中,kepler.m函数可以用于计算卫星的开普勒元素,eci2aer.m函数可以将地心惯性坐标系转换为方位-仰角-距离坐标系,eci2lla.m函数可以将地心惯性坐标系转换为经纬度坐标系。
三、卫星轨道计算实例下面以一个实例来演示如何使用Matlab进行卫星轨道计算。
假设我们有一个地球同步轨道卫星,其开普勒元素为:轨道倾角为28.5度,升交点经度为135度,轨道高度为35786千米。
首先,我们可以使用kepler.m函数计算出卫星的开普勒元素:a = 35786; % 轨道长半轴e = 0; % 轨道离心率i = deg2rad(28.5); % 轨道倾角omega = deg2rad(135); % 升交点经度w = 0; % 近地点幅角M = 0; % 平近点角[~, ~, ~, nu, ~, ~] = kepler(a, e, i, omega, w, M);然后,我们可以使用eci2aer.m函数将地心惯性坐标系转换为方位-仰角-距离坐标系:[az, el, r] = eci2aer(r_ECI, v_ECI, lat, lon, h, t);我们可以使用eci2lla.m函数将地心惯性坐标系转换为经纬度坐标系:[lat, lon, h] = eci2lla(r_ECI, t);通过以上步骤,我们可以得到卫星在不同时间点的方位角、仰角、距离以及经纬度信息。
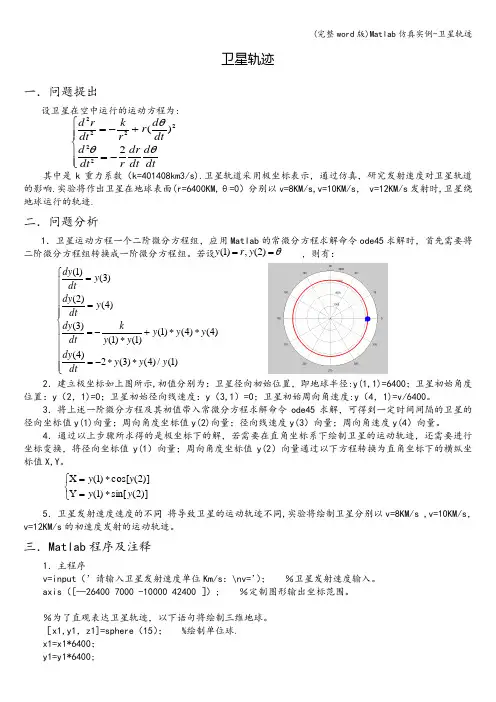
卫星轨迹一.问题提出设卫星在空中运行的运动方程为:其中是k 重力系数(k=401408km3/s).卫星轨道采用极坐标表示,通过仿真,研究发射速度对卫星轨道的影响.实验将作出卫星在地球表面(r=6400KM,θ=0)分别以v=8KM/s,v=10KM/s , v=12KM/s 发射时,卫星绕地球运行的轨迹.二.问题分析1.卫星运动方程一个二阶微分方程组,应用Matlab 的常微分方程求解命令ode45求解时,首先需要将二阶微分方程组转换成一阶微分方程组。
若设 ,则有:2.建立极坐标如上图所示,初值分别为:卫星径向初始位置,即地球半径:y(1,1)=6400;卫星初始角度位置:y (2,1)=0;卫星初始径向线速度:y (3,1)=0;卫星初始周向角速度:y (4,1)=v/6400。
3.将上述一阶微分方程及其初值带入常微分方程求解命令ode45求解,可得到一定时间间隔的卫星的径向坐标值y(1)向量;周向角度坐标值y(2)向量;径向线速度y(3)向量;周向角速度y(4)向量。
4.通过以上步骤所求得的是极坐标下的解,若需要在直角坐标系下绘制卫星的运动轨迹,还需要进行坐标变换,将径向坐标值y(1)向量;周向角度坐标值y(2)向量通过以下方程转换为直角坐标下的横纵坐标值X,Y 。
5.卫星发射速度速度的不同 将导致卫星的运动轨迹不同,实验将绘制卫星分别以v=8KM/s ,v=10KM/s ,v=12KM/s 的初速度发射的运动轨迹。
三.Matlab 程序及注释1.主程序v=input (’请输入卫星发射速度单位Km/s :\nv=’); %卫星发射速度输入。
axis ([—26400 7000 -10000 42400 ]); %定制图形输出坐标范围。
%为了直观表达卫星轨迹,以下语句将绘制三维地球。
[x1,y1,z1]=sphere (15); %绘制单位球.x1=x1*6400;y1=y1*6400; ⎪⎪⎩⎪⎪⎨⎧-=+-=dt d dt dr r dt d dt d r r k dt r d θθθ2)(222222θ==)2(,)1(y r y ⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧**-=**+*-===)1(/)4()3(2)4()4()4()1()1()1()3()4()2()3()1(y y y dt dy y y y y y k dt dy y dt dy y dt dy ⎩⎨⎧*=*=)]2(sin[)1(Y )]2(cos[)1(X y y y yz1=z1*6400; %定义地球半径。
嫦娥一号与月亮、地球、太阳关系演示图欧阳仕粮学号:20084051014(吉首大学物理与机电工程学院,湖南吉首416000)摘要:用matlab模拟嫦娥一号人造卫星运围绕月球做周期性运动时,人造卫星、月球、地球相对于太阳的运动轨迹动画。
展现了人造卫星绕月飞行时相对与参照物太阳的运动轨迹,便于直观的了解卫星相对于太阳的相对运动。
关键词:卫星运动轨迹;相对运动;数学软件matlab1、引言大家都知道我们所了解的地球围绕太阳做近似圆周运动的规则运动,当然月球,人造地球卫星也是如此,而我们一直以来所关注的登月工程的探月卫星也是这样一种情况。
那月球、探月卫星嫦娥一号相对于太阳是一个怎样的情形,下面通过计算机软件matlab,来模拟一下月球、嫦娥一号相对太阳的运动动画,并描绘出轨迹。
2、原理假设我们所研究的所有星体处在同一水平面上。
地球距太阳的的平均距离为R,月球距地球的平均距离为r1,嫦娥一号距月球的平均距离为r2,地球公转角速度w1,月亮公转角速度w2,嫦娥一号绕月亮公转角速度w3。
我们从0每隔0.01到2 取一个弧度s1。
地球相对太阳转过的角度sita1,月亮相对地球转过的角度sita2,嫦娥一号相对月球转过的角度sita3,设开始时间为t=0,然后每隔时间T进行一次取样计算,计算各个星体的的位置坐标。
首先,确定太阳的位置为(0,0),根据圆周运动的轨迹方程确定地球的运行轨道(R*cos(s1),R*sin(s1)),确定月球围绕地球公转的轨道(R*cos(sita1)+r1*cos(s1),R*sin(sita1)+r1*sin(s1)),再确定画嫦娥一号绕月亮公转轨道(R*cos(sita1)+r1*cos(sita1)+r2*cos(s1),R*sin(sita1)+r1*sin(sita1)+r2*sin(s1)),这样就找出了地球、月球、嫦娥一号的轨迹。
分别在matlab中用plot函数画出。
Lambert轨道问题是由瑞士数学家约翰·海因里希·兰伯特于1761年提出的一个数学问题,用于求解两个给定位置的天体之间的转移轨道。
这个问题在航天领域中具有重要意义,例如在飞行器的轨道设计、太空探测器的轨道调整等方面都有广泛的应用。
为了解决Lambert轨道问题,可以通过编写MATLAB代码来进行求解。
在编写MATLAB代码进行Lambert轨道问题求解时,主要需要考虑以下几个方面:1. 问题的数学建模:首先需要将Lambert轨道问题进行数学建模,将问题描述为数学表达式。
根据两个给定的位置点和转移时间,可以得到一个由开普勒方程定义的转移轨道。
通过求解这个开普勒方程,可以得到相应的轨道参数。
2. MATLAB代码实现:根据数学建模的结果,可以编写MATLAB代码来实现Lambert轨道问题的求解。
一般可以使用数值计算的方法,例如牛顿-拉夫逊法或者二分法等来求解开普勒方程,得到轨道参数。
3. 算法优化:在编写MATLAB代码的过程中,需要考虑算法的效率和准确性。
可以通过改进算法的迭代次数、初始值选择等方式来提高算法的求解速度和精度。
4. 代码测试与验证:编写MATLAB代码后,需要进行代码的测试与验证,验证代码的准确性和可靠性。
可以通过一些已知的实际案例进行验证,例如国际空间站的航天器轨道设计等。
编写MATLAB代码来求解Lambert轨道问题是一个复杂且具有挑战性的任务,需要对数学建模、数值计算以及编程技术具有较高的要求。
通过不断的学习和实践,可以不断提高自己的能力,进而解决实际的工程问题。
Lambert轨道问题是航天领域中一个重要的数学问题,由瑞士数学家约翰·海因里希·兰伯特于18世纪提出,用于求解两个给定位置的天体之间的转移轨道。
对于航天器的轨道设计、太空探测器的轨道调整等方面具有广泛的应用。
为了解决Lambert轨道问题,可以借助MATLAB等数学建模和编程工具来进行求解。
低轨卫星轨道仿真matlab低轨卫星轨道仿真可以使用MATLAB进行,以下是一个简单的步骤:1. 建立模型:首先需要建立一个低轨卫星模型。
这个模型可以基于卫星的物理参数,如质量、轨高度、自转等参数。
这些参数可以通过现有的卫星数据集或者自己计算获得。
2. 建立方程:在建立模型的同时,需要建立一个方程来描述卫星的运动。
这个方程可以使用牛顿第二定律或万有引力定律等经典物理学方程进行建模。
3. 运行仿真:使用MATLAB中的Simulink模块运行仿真。
Simulink提供了丰富的工具箱,可以帮助建模和仿真复杂的系统。
在Simulink中,可以使用运动仿真工具箱来仿真卫星的运动。
4. 可视化结果:在仿真运行结束后,可以使用MATLAB中的plot 模块来可视化结果。
将卫星的运动轨迹、速度、轨道高度等数据可视化出来,以便更好地理解卫星的运动行为。
下面是一个简单的低轨卫星轨道仿真的MATLAB代码示例,假设我们使用仿真工具箱来模拟卫星的运动:```matlab% 建立模型model = reshape(load("低轨卫星模型.mat"), [1 1 3]);model.M = [10.0 8.0 6.0]; % 卫星质量model.H = [300.0 200.0 200.0]; % 轨道高度model.Z = [0.1; 0.15; 0.2]; % 卫星轨道中心距地面的高度 model.V = [0.9; 0.94; 0.97]; % 卫星的速度% 建立方程F = 1.0; % 引力常数,近似为1g = 9.8; % 重力加速度,近似为9.8米/秒^2M = model.M; % 卫星质量h = model.H - 2*model.Z; % 卫星轨道中心距地面的高度model.P = 1.0; % 卫星的公转周期% 运行仿真Time = 0:0.01:1; % 仿真时间,单位为秒X = model.V*Time; % 卫星的X坐标Y = model.V*Time + h/2; % 卫星的Y坐标Z = model.V*Time + 3*h/2; % 卫星的Z坐标plot(X, Y, Z, "b"); % 可视化卫星的运动轨迹title("低轨卫星轨道仿真结果");```在这个代码中,我们使用了牛顿第二定律和万有引力定律来建立卫星的运动方程。
MATLAB卫星轨迹引言卫星轨迹是描述卫星在地球或其他天体之间运动的路径。
通过了解卫星轨迹,我们可以预测和控制卫星的运行,以及计划卫星的任务。
在本文档中,我们将使用MATLAB来分析和绘制卫星轨迹。
确定卫星轨迹方程卫星在空间中的运动可以通过多种方式描述,其中一种常用的方法是使用开普勒问题的解析解。
开普勒问题是描述两个质点间引力相互作用的运动方程。
对于一个质点沿着椭圆轨道运动的情况,其运动方程可以表示为:轨道方程轨道方程其中,r是卫星与中心天体(例如地球)之间的距离,a和b是椭圆的半长轴和半短轴,e是离心率,θ是卫星相对于半长轴的偏移角。
在MATLAB中,我们可以使用以下代码来计算卫星的轨道方程:function [x, y] = compute_orbit(a, e, theta)r = a * (1 - e^2) ./ (1 - e * cos(theta));x = r .* cos(theta);y = r .* sin(theta);end绘制卫星轨迹在计算了卫星的轨道方程之后,我们可以使用MATLAB的绘图工具将卫星轨迹可视化。
以下是绘制卫星轨迹的代码示例:a = 6378; % 半长轴e = 0.1; % 离心率theta = linspace(0, 2*pi, 1000); % 角度范围[x, y] = compute_orbit(a, e, theta);figure;plot(x, y);axis equal;title('卫星轨迹');xlabel('X轴');ylabel('Y轴');在上述代码中,我们假设半长轴为6378千米,离心率为0.1,并生成1000个角度点。
然后,我们使用compute_orbit 函数计算卫星的轨道坐标,并使用plot函数绘制这些坐标。
最后,我们使用axis equal命令来确保图形的横纵比例相等,以保持轨道的形状准确。
基于MATLAB/Simulink的GPS卫星导航仿真器设计作者:赵晶张伟来源:《科技资讯》 2011年第20期赵晶张伟(中国电子科技集团公司第二十研究所陕西西安 710068)摘要:本文首先介绍了GPS卫星定位的原理和算法,然后给出了GPS仿真器的Simulink 建模实现方法,并对其定位精度进行了误差分析,仿真结果表明该仿真器定位精度与实际接收机相当,可以用来模拟真实的卫星定位,为综合导航系统的研制工作带来了便利。
关键词:GPS卫星导航 Simulink建模动态仿真中图分类号:文献标识码:A文章编号:1672-3791(2011)07(b)-0000-001 引言现代飞行器对导航系统有着越来越高的要求,尤其是长航时飞机对导航设备的精度、可靠性以及连续性都提出了全面的要求。
每种导航系统都有其固有的局限性,因此仅靠单一系统的导航设备独立使用难以完全满足这些要求。
于是,使用多种导航技术的综合导航系统逐渐进入人们的视线,并受到广泛关注。
由于飞行实验费用大,对于综合导航系统最初的算法验证和实验测试,往往无法进行飞行器搭载实验,因此国内外均采用实验室半物理仿真系统进行初期实验研究。
Simulink是一种针对动态系统进行建模、仿真和分析的工具,它被广泛应用于线性系统、非线性系统的建模和仿真,支持连续系统、离散系统或者两种混合的系统和多速率系统。
本文介绍了“大飞机”综合导航仿真系统中,基于MATLAB/Simulink开发的GPS仿真器的原理和设计过程。
2 仿真器的应用环境如图1所示,综合导航仿真系统由飞行、惯导、卫星导航、天文导航、大气数据仿真、无线电高度表、地形匹配导航等分系统仿真器加上显控系统构成。
本文述及的工作主要集中于综合导航仿真系统中卫星导航仿真器的设计及其Simulink建模实现。
飞行仿真器有手动操作和自动飞行两种控制模式,自动飞行模式下仿真器根据预设航线输出飞机实时位置、速度、加速度、姿态等参数;手动模式下通过外置手柄来模拟操作飞机完成起飞、爬升、平飞、姿态改变和降落等全过程,飞行仿真器根据手柄传感器的输出信息仿真计算输出飞机的飞行数据。
运用matlab计算gps卫星的坐标位置clearclcformat longtp=input('tp=');toc=input('toc=');a0=input('a0=');a1=input('a1=');a2=input('a2=');toe=input('toe=');M0=input('M0=');a=input('长半径a=');deltan=input('卫星平均角速度之差deltan=');e=input('e=');w=input('w=');Cuc=input('Cuc=');Cus=input('Cus=');Cic=input('Cic=');Cis=input('Cis=');Crc=input('Crc=');Crs=input('Crs=');i0=input('i0=');I=input('轨道倾角变化率I=');OM0=input('OM0=');OM=input('升交点赤径变化率OM=');tt=a0+a1*(tp-toc)+a2*(tp-toc);t=tp-tt;tk=t-toe;u=3.986005e14;n0=(sqrt(u))/(a*a*a);n=n0+deltan;Mk=M0+n*tk;{n=MK;ek0=0;ek1=n+e*sin(ek0);ek2=n+e*sin(ek1);EK=ek2;}Dk=1;Ek=0;n1=0;while abs(Ek-Dk)>0.0000000001n1=n1+1;Ek=Dk;Dk=Mk+e*sin(Ek);endEk=Dk;Vk=atan((sqrt(1-e*e)*sin(Ek)/(cos(Ek)-e)); if sin(Ek)>0 & cos(Ek)-e<0Vk=pi-Vk;elseif sin(Ek)<0 & cos(Ek)-e<0Vk=pi+Vk;elseif sin(Ek)<0 & cos(Ek)-e>0Vk=2*pi-Vk;endFaik=Vk+w;SigmaU=Cuc*cos(2*Faik)+Cus*sin(2*Faik); SigmaR=Crc*cos(2*Faik)+Crs*sin(2*Faik);SigmaI=Cic*cos(2*Faik)+Cis*sin(2*Faik);Uk=Faik+SigmaU;Rk=a*(1-e*cos(Ek))+SigmaR;Ik=i0+SigmaI+I*tk;X0=Rk*cos(Uk);Y0=Rk*sin(Uk);we=7.29211567e-5;OMK=OM0+(OM-we)*tk-we*toe;Xk=X0*cos(OMK)-Y0*cos(Ik)*sin(OMK);Yk=X0*sin(OMK)+Y0*cos(Ik)*cos(OMK);Zk=Y0*sin(Ik);disp(['卫星钟差改正dt=',num2str(tt)])disp(['归化时刻tk=',num2str(tk)])disp(['平均运行角速度n=',num2str(n)])disp(['卫星平近点角Mk=',num2str(Mk)])disp(['偏近点角Ek=',num2str(Ek)])disp(['真近点角Vk=',num2str(Vk)])disp(['升交距角Faik=',num2str(Faik)])disp(['摄动改正项SigmaU=',num2str(SigmaU)]) disp(['摄动改正项SigmaR=',num2str(SigmaR)]) disp(['摄动改正项SigmaI=',num2str(SigmaI)]) disp('经过摄动改正项:')disp(['升交距角Uk=',num2str(Uk)])disp(['卫星矢径Rk=',num2str(Rk)])disp(['轨道倾角Ik=',num2str(Ik)])disp('卫星在轨道平面坐标系的坐标')disp(['X0=',num2str(X0)])disp(['Y0=',num2str(Y0)])disp(['观测时刻升交点经度OMK=',num2str(OMK)]) disp('卫星在地心固定坐标系中的直角坐标')disp(['Xk=',num2str(Xk)]) disp(['Yk=',num2str(Yk)]) disp(['Zk=',num2str(Zk)])。
如何使用Matlab进行卫星导航与定位卫星导航与定位是一门广泛应用于航空、航海、地理信息系统等领域的技术。
在这个时代,人们越来越依赖全球定位系统(GPS)来获取准确的位置信息。
而Matlab作为一种功能强大的数学软件工具,可以帮助我们进行卫星导航与定位的模拟和算法设计。
本文将介绍如何使用Matlab进行卫星导航与定位的相关内容。
在开始之前,我们需要明确一些基础知识。
首先,我们需要了解GPS工作的原理。
GPS系统主要由卫星、地面控制站和接收器三部分组成。
卫星发送信号,接收器接收并计算信号传播的时间差来确定位置。
其次,我们需要了解GPS的信号类型。
GPS信号包括C/A码和P码两种类型,其中C/A码用于民用接收器,P码用于军用接收器。
最后,我们需要了解GPS的误差来源。
GPS的定位误差主要来自多普勒效应、大气延迟、钟差等因素。
使用Matlab进行卫星导航与定位需要用到一些特定的工具和函数。
首先,我们需要导入相应的工具箱。
Matlab提供了GPS工具箱和导航工具箱,可以帮助我们进行相关的计算和模拟。
在导入工具箱之后,我们可以使用相关函数进行卫星导航与定位的模拟和计算。
例如,可以使用gpscoordinates函数来计算卫星的位置信息,使用gps2utc函数来进行时间转换等。
在进行卫星导航与定位的模拟和计算之前,我们需要准备相关的数据。
首先,我们需要获取卫星的星历数据。
星历数据包括卫星的位置、速度和加速度等信息,可以帮助我们计算卫星的轨道和位置。
其次,我们需要获取接收器的观测数据。
观测数据包括接收器接收到的信号的时间和信号的强度等信息,可以帮助我们计算信号传播的时间差和定位误差。
最后,我们需要获取地球的几何形状数据。
地球的几何形状数据包括地球的椭球体参数和地球的地理坐标系等信息,可以帮助我们进行地球坐标和地理位置的转换。
在得到所需的数据之后,我们就可以开始使用Matlab进行卫星导航与定位的模拟和计算了。
GPS卫星轨道计算及其MATLAB仿真黎奇,白征东,李帅,陈波波(清华大学地球空间信息研究所,北京 100084)一、程序设计思路1. 读取RINEX文件(注意:文件路径)2. 计算测量日周积秒(测量日的格里历→GPST)3. 按卫星轨道计算步骤计算WGS-84坐标系坐标(内插)4. 按需要将WGS-84坐标系下坐标转换为所需坐标系坐标5. 画图输出二、n 文件说明及读取程序参考时刻oe t 的RINEX 格式的 “”广播星历文件具体如下:(加粗部分为本次轨道化Ω,率i ,弧度/秒4-22)标svacc ,米)收到的卫星信号解,秒)文件名:RinexNreader.m 输 入:文件地址,卫星编号三、计算测量日的周积秒文件名:GCtoGPS.m (其中调用函数:GCtoJD.m)输入:指定公历的年、月、日、时、分、秒文件名:GCtoJD.m输 入:指定公历的 年、月、日四、GPS 卫星轨道计算步骤及计算程序1. 计算卫星运动的平均角速度n平均角速度()03n =经摄动参数n ∆改正后的平均角速度0n n n =+∆3#61-79),n ∆(2#42-60);14323.98600510/GM m s =⨯ 2. 计算归化时间k t说明:①广播星历是oe t 时刻的,对应的轨道参数也是oe t 时刻的,而观测时间在t 时刻,显然oe t t <。
所以,要想获得t 时刻的轨道参数,需要知道t 与oe t 之间的差值即k t 。
以此,按照oe t 时刻轨道参数,外推t 时刻轨道参数。
②k t 的起算时间是星期六/星期日子夜0点,当302400k t s >时,604800k t s -;当302400k t s <-时,+604800k t s 。
(604800s=1周) =k oe t t t -,且604800302400604800302400k k k k k k t t t t t t =-⎧⎨=+⎩> <-已知:oe t (1#4-21)3. 计算观测时刻的平近点角k M0k k M M nt =+已知:0M (2#61-79),n (见1),k t (见2) 4. 计算观测时刻的偏近点角k Esin k k k E M e E =+已知:k M (见3),e (3#23-41)方法:迭代解算,设初值0k k E M =,迭代2次基本收敛。
用MATLAB计算GPS卫星位置摘要:本文主要介绍了GPS测量数据的常用格式RINEX标准文件格式,并利用MA TLAB工具计算出所观测卫星里的五颗卫星(14、20、29、31和32五颗)在283个历元的瞬时位置,即所观测时间段里五颗卫星在WGS-84坐标下的空间运行轨迹。
关键词:RINEX标准文件WGS-84下卫星位置MATLAB工具GPS定位的基本原理简单来说就是在WGS-84空间直角坐标系中,确定未知点与GPS卫星的空间几何关系。
因此利用GPS进行导航和测量时,卫星是作为位置已知的高空观测目标。
那么如何精确快速的解算出卫星在空间运行的轨迹即其轨道是实现未知点快速定位的关键。
1 标准格式RINEX格式简述在进行GPS数据处理时,由于接收机出自于不同厂家,所以厂家设计的数据格式也是五花八门的,但是在实际中,很多时候需要把来自不同型号的接收机的数据放在一块进行处理,这就需要数据格式的统一,为了解决这种矛盾,RINEX(英文全称为:The Receiver Independent Exchange Format)格式则应运而生,该格式存储数据的类型是文本文件,数据记录格式是独立于接收机的出自厂家和具体型号的。
由此可见,其特点是:由于是通用格式,所以可将不同型号接收机收集的数据进行统一处理,并且大多数大型数据处理软件都能够识别处理,此外也适用于多种型号的接收机联合作业,通用性很强。
RINEX标准文件里不是单一的一个文件,而是包括如下几种类型的文件[1]。
2 卫星坐标的计算步骤由于在GPS定位和导航的时候,用户都是把GPS卫星的位置作为已知量来对待,并且GPS定位所用的坐标系是世界大地坐标系WGS-84。
所以就先必须根据GPS接收机观测的相应星历数据,解算出GPS卫星在WGS-84坐标系中的瞬时位置。
为了后面计算方便,先对广播星历中涉及到的计算卫星坐标的一些轨道参数进行说明,如表4所示。
由于每隔两个小时,GPS接收机收到的广播星历才更新一次,所以用户在根据接收机收到的卫星导航电文汇总的广播星历参数推算GPS的瞬时坐标的时候,一定要选取与GPS卫星的瞬时坐标时刻最相近的那组广播星历数据[2],否则误差将会很大。
第5章卫星轨道计算卫星轨道计算是卫星技术中非常重要的一部分,涉及到卫星的运行轨迹、轨道参数等内容。
在进行卫星轨道计算时,需要考虑多种因素,如地球引力、卫星自身推进力等,以保证卫星能够按照预定的轨道运行。
本文将介绍卫星轨道计算的基本原理和方法,并举例说明。
首先,需要明确卫星轨道计算的基本参数。
常用的卫星轨道参数有轨道高度、轨道倾角、轨道周期等。
轨道高度指的是卫星轨道与地球表面的最短距离,单位一般为千米。
轨道倾角则表示卫星轨道平面与地球赤道面之间的夹角,单位为度。
轨道周期是指卫星绕地球运行一周所需的时间,单位为分钟。
这些参数的计算是卫星轨道计算的基础。
其次,卫星轨道计算需要考虑地球引力的影响。
地球引力是卫星运行的主要力量之一,它会使卫星向地球中心方向做受力运动。
因此,在进行卫星轨道计算时,需要将地球引力的作用考虑进去。
具体来说,可以使用开普勒定律和牛顿第二定律来计算卫星的轨道。
开普勒定律是描述行星运动的基本定律之一,也适用于卫星的轨道运动。
根据开普勒第一定律,卫星绕地球的轨道是一个椭圆,地球位于椭圆焦点之一、根据开普勒第二定律,卫星在轨道上的相等时间内,扫过的面积是相等的。
根据开普勒第三定律,卫星绕地球的周期和轨道半长轴之间存在一个数学关系。
牛顿第二定律则是描述物体运动的基本定律之一,也适用于卫星的轨道运动。
牛顿第二定律指出,物体的受力与加速度成正比,与物体的质量成反比。
因此,在进行卫星轨道计算时,可以根据牛顿第二定律,计算卫星受力情况,从而推算出卫星的轨道运动。
卫星轨道计算的具体方法有多种,其中一种常用的方法是数值计算方法。
这种方法通过将轨道问题转换为数值求解的问题,使用计算机进行计算。
具体来说,可以使用微分方程数值解的方法,结合卫星的初始条件,通过迭代计算获得卫星的轨道。
这种方法可以较为准确地计算出卫星的轨道,适用于复杂的轨道计算问题。
综上所述,卫星轨道计算是卫星技术中非常重要的一部分,涉及到卫星的运行轨迹、轨道参数等内容。
卫星轨道高度速度计算公式卫星是人类利用航天技术将人造物体送入地球轨道或其他天体轨道的一种人造天体。
卫星通常用于通信、导航、气象监测、科学研究等领域。
在卫星的设计和运行过程中,计算卫星轨道高度和速度是非常重要的一部分。
本文将介绍卫星轨道高度速度计算公式,并探讨其在卫星设计和运行中的应用。
卫星轨道高度速度计算公式是由牛顿引力定律和圆周运动定律推导而来的。
在地球的引力作用下,卫星绕地球运动。
根据牛顿引力定律,地球对卫星的引力与卫星的质量和地球的质量成正比,与卫星与地球的距离的平方成反比。
根据圆周运动定律,卫星绕地球运动的加速度与卫星的速度的平方和卫星与地球的距离成反比。
综合考虑这两个定律,可以得到卫星轨道高度速度计算公式。
首先,我们来推导卫星轨道高度速度计算公式。
假设卫星质量为m,地球质量为M,卫星与地球的距离为r,卫星的速度为v。
根据牛顿引力定律,地球对卫星的引力F可以表示为:F =G M m / r^2。
其中,G为万有引力常数。
根据牛顿第二定律,卫星的加速度a可以表示为:a = F / m = G M / r^2。
根据圆周运动定律,卫星的加速度a与卫星的速度v和卫星与地球的距离r之间的关系为:a = v^2 / r。
将上述两个式子联立,可以得到卫星轨道高度速度计算公式:v = sqrt(G M / r)。
这就是卫星轨道高度速度计算公式。
根据这个公式,我们可以通过已知的地球质量和卫星与地球的距离来计算卫星所需的速度。
同时,通过这个公式,我们也可以计算出卫星所需的轨道高度。
在卫星设计和运行中,卫星轨道高度速度计算公式有着重要的应用。
首先,对于通信卫星和气象卫星等需要稳定轨道的卫星来说,确定合适的轨道高度和速度是非常重要的。
通过卫星轨道高度速度计算公式,工程师可以根据卫星的任务需求和地球的引力场来确定卫星的轨道参数,从而保证卫星能够稳定运行并完成其任务。
其次,对于导航卫星来说,合适的轨道高度和速度也是至关重要的。
基于MATLAB的GPS信号的仿真研究一、本文概述随着全球定位系统(GPS)技术的广泛应用,其在导航、定位、授时等领域的重要性日益凸显。
为了更好地理解GPS信号的特性,提高GPS接收机的设计水平和性能,对GPS信号进行仿真研究显得尤为重要。
本文旨在探讨基于MATLAB的GPS信号仿真方法,分析GPS信号的特点,以及如何利用MATLAB这一强大的数值计算环境和图形化编程工具,对GPS信号进行高效、精确的仿真。
文章首先介绍了GPS系统的发展历程、基本原理和信号特性,为后续的信号仿真提供了理论基础。
随后,详细阐述了GPS信号仿真的一般流程,包括信号生成、传播模型、噪声添加等关键环节。
在此基础上,重点介绍了如何利用MATLAB编写GPS信号仿真程序,包括信号生成、传播模型建立、噪声模拟等方面的具体实现方法。
文章还通过实际案例,展示了基于MATLAB的GPS信号仿真在接收机设计、性能评估等方面的应用。
通过仿真实验,可以深入了解GPS信号在不同环境下的传播特性,为接收机算法优化和性能提升提供有力支持。
本文的研究不仅有助于加深对GPS信号特性和仿真方法的理解,也为GPS接收机的研究和开发提供了一种有效的技术手段。
通过MATLAB的仿真研究,可以更加直观地揭示GPS信号的本质规律,为实际应用提供有力指导。
二、GPS信号原理及特性全球定位系统(GPS)是一种基于卫星的无线电导航系统,它利用一组在地球轨道上运行的卫星来提供全球范围内的定位和时间服务。
每个GPS卫星都不断地向地球表面发射射频信号,这些信号被地面上的接收器接收并处理,从而确定接收器的三维位置和速度,以及精确的时间信息。
GPS卫星发射的信号是L波段的射频信号,分为两个频段:L1(142 MHz)和L2(160 MHz)。
每个频段都包含两种类型的信号:C/A码(粗捕获码)和P码(精密码)。
C/A码是对公众开放的,用于民用和商业应用,而P码则用于军事和特定的高精度应用。