卫星轨道参数计算
- 格式:doc
- 大小:183.00 KB
- 文档页数:4
卫星导航定位常用参数和常用公式1、常用参考框架的几何和物理参数1.1 ITRFyy 主要的大地测量常数长半轴a=6.3781366×106m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球动力因子J2=1.0826359×10-3;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.25642;椭球正常重力位U0=6.26368560×107 m2/s2;γ=9.7803278 m/s2;赤道正常重力e光速c=2.99792458×108 m/s。
1.2 GTRF主要的大地测量常数长半轴a=6.37813655×106 m;地球引力常数GM=3.986004415×1014 m3/s2;地球动力因子J2=1.0826267×10-3;扁率1/f =298.25769。
1.3 WGS84(Gwwww)主要的大地测量常数长半轴a=6.3781370×106 m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.257223563;椭球正常重力位U0=62636860.8497 m2/s2;γ=9.7803267714m/s2;赤道正常重力e短半轴b=6356752.3142m;引力位二阶谐系数C=-484.16685×10-6;2,0第一偏心率平方2e=0.00669437999013;e'=0.006739496742227。
第二偏心率平方21.4 PZ90 主要的大地测量常数长半轴a=6.378136×106m;地球引力常数GM=3.9860044×1014 m3/s2;fM=3.5×108 m3/s2;地球大气引力常数a地球自转角速度ω=7.292115×10-5 rad/s。
卫星定位公式【原创版】目录1.卫星定位的基本原理2.卫星定位公式的构成3.卫星定位公式的应用4.卫星定位技术的发展正文1.卫星定位的基本原理卫星定位系统是一种利用卫星发射的信号来确定地球表面某一点的精确位置的技术。
其基本原理可以概括为:测量卫星发射的信号从卫星到达地面某一点的时间,根据光速和时间的关系,计算出该点与卫星之间的距离。
同时,通过至少三个卫星的定位,可以确定该点的三维坐标。
2.卫星定位公式的构成卫星定位公式主要包括以下三个部分:(1) 计算卫星与地面点之间的距离公式:d = c * t,其中 d 为距离,c 为光速(约为 3 * 10^8 米/秒),t 为信号传输时间。
(2) 计算卫星的轨道参数公式:T = 2 * π * sqrt(a^3 / μ),其中 T 为卫星的周期,a 为卫星的半长轴,μ为地球的标准引力参数。
(3) 计算地面点的三维坐标公式:x = (t1 * cos(E1) - t2 * cos(E2)) * cos(A) + (t1 * sin(E1) - t2 * sin(E2)) * sin(A),y = (t1 * cos(E1) - t2 * cos(E2)) * sin(A) - (t1 * sin(E1) - t2 * sin(E2)) * cos(A),z = (t1 * cos(E1) + t2 * cos(E2)) * cos(I) + (t1 * sin(E1) + t2 * sin(E2)) * sin(I),其中 x、y、z 为地面点的三维坐标,t1、t2 为卫星 1、卫星 2 的信号传输时间,E1、E2、I 分别为卫星 1、卫星 2 的倾角和地球的倾角。
3.卫星定位公式的应用卫星定位公式广泛应用于各种定位导航系统,如我国的北斗卫星导航系统、美国的 GPS 系统等。
这些系统通过卫星发射的信号,实时计算接收器与卫星之间的距离,从而实现对地球表面的精确定位。
卫星轨道参数详解⽬录⼀.卫星根数1.1 六根数1.2 卫星星历两⾏根数(TLE(two line element))tle1:tle2:1.3 航天器的运⾏轨道分类1.4轨道速度的计算⼀.卫星根数1.1 六根数⼈造卫星轨道六要素(也称为轨道六根数)是⽤于表征卫星轨道形状、位置及运动等属性的参数,可⽤来确定任意时刻卫星的轨道和位置。
通常的轨道六根数指的是:半长轴a、离⼼率e、轨道倾⾓i、近⼼点辐⾓ω、升交点经度Ω和真近点⾓φ。
六根数中,前2项确定了轨道形状,第3、4、5项确定了轨道平⾯所处的位置,第6项确定了卫星在轨道中当前所处位置(注意:第6项除了⽤真近点⾓来表征外,还常常⽤平近点⾓、过升交点时刻、过近地点时刻等参量表征,其效果是等价的。
六根数⽰意图半长轴a:这个根数决定了卫星轨道形成的椭圆长半轴的长度,及轨道的⼤⼩。
同时,这个根数也决定了发射卫星到这个轨道需要多少能量,因为根据活⼒公式,⼀个确定轨道的机械能是固定的。
不同任务类型的卫星,或者运载约束,⼯作在不同的轨道⾼度上。
发射到不同轨道所需要的能量都需要依靠半长轴来计算。
如下图所⽰,飞得越⾼的卫星速度越慢,也是依据半长轴计算⽽来的。
偏⼼率e:跟椭圆的扁率是⼀个意思,代表轨道偏⼼的程度。
偏⼼率近似等于0的轨道⼀般称为近圆轨道,此时地球的质⼼⼏乎与轨道⼏何中⼼重合。
偏⼼⼤于0⼩于1,轨道就呈椭圆状,偏⼼率越⼤轨道越扁。
轨道倾⾓i:即轨道平⾯与⾚道平⾯之间的夹⾓,⽤于描述轨道的倾斜程度,简单地说就是轨道平⾯相对于地球⾚道平⾯是躺着的还是⽴着的或者是斜着的。
卫星轨道的倾⾓决定了卫星星下点所能覆盖的地理⾼度,并对发射场和运载⽕箭的运⼒形成硬性约束。
具体⽽⾔,若想卫星⾏下点轨迹覆盖⾼纬度地区,则卫星轨道倾⾓不能⼩于该纬度;发射场的纬度不能⾼于卫星轨道倾⾓;在半长轴和发射场相同的情况下,运载⽕箭发射倾⾓更⾼的卫星需要提供更多的能量。
升交点⾚经Ω:理解这个轨道根数需要在称为惯性系的三维空间中进⾏。
测绘技术中的导航卫星轨道参数计算方法导航卫星轨道参数计算是测绘技术中的重要环节,它为全球定位系统(GPS)、北斗导航系统、伽利略导航系统等提供了精准的卫星定位和导航服务。
在这篇文章中,我将介绍测绘技术中常用的导航卫星轨道参数计算方法。
我国的北斗导航系统是目前世界上发展最为迅猛的卫星导航系统之一。
为了保证北斗卫星系统的精准定位和导航能力,需要准确计算卫星的轨道参数。
在测绘技术中,常用的导航卫星轨道参数计算方法有“数值积分法”和“天文方法”。
数值积分法是导航卫星轨道参数计算中常用的一种方法。
它基于牛顿第二定律和万有引力定律,通过对卫星的运动轨迹进行数值计算来得到卫星的位置和速度。
数值积分法的优点是计算结果准确,适用范围广。
但是,它的计算过程比较复杂,需要大量的计算资源和时间。
另一种常用的导航卫星轨道参数计算方法是“天文方法”。
天文方法是通过观测卫星在天空中的位置和运动轨迹,利用天文学的知识和方法来计算导航卫星的轨道参数。
天文方法的优点是计算过程相对简单,无需大量的计算资源。
然而,它的准确度受到观测条件和天气等因素的限制,可能存在一定的误差。
除了这两种方法外,还有其他一些导航卫星轨道参数计算方法被广泛应用于测绘技术中。
例如,基于差分定位技术的轨道参数计算方法可以通过对接收机接收到的卫星信号进行处理,进而计算出卫星的轨道参数。
这种方法的优点是计算过程简单快捷,适用于现场实时测量。
此外,还有一些高级的计算方法被应用于导航卫星轨道参数的计算中。
比如,卡尔曼滤波方法、最小二乘法和粒子滤波方法等。
这些方法通过对测量值和预测值进行迭代运算,逐步优化计算结果,提高了轨道参数计算的精度和稳定性。
当然,这些方法的计算过程相对复杂,需要较高的专业知识和技术。
综上所述,导航卫星轨道参数计算是测绘技术中不可或缺的一环。
不同的计算方法各有优劣,适用于不同的应用场景。
如何选择合适的方法,并在实际应用中准确计算出导航卫星的轨道参数,是测绘技术工作者需要不断探索和研究的课题。

![卫星轨道计算[仅供参考]](https://uimg.taocdn.com/0fac6c5f9b6648d7c1c746b2.webp)
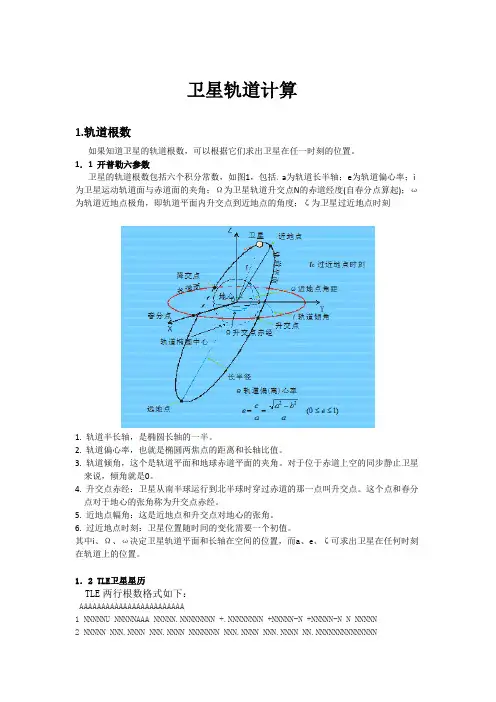
卫星轨道计算1.轨道根数如果知道卫星的轨道根数,可以根据它们求出卫星在任一时刻的位置。
1.1 开普勒六参数卫星的轨道根数包括六个积分常数,如图1,包括,a为轨道长半轴;e为轨道偏心率;i 为卫星运动轨道面与赤道面的夹角;Ω为卫星轨道升交点N的赤道经度(自春分点算起);ω为轨道近地点极角,即轨道平面内升交点到近地点的角度;ζ为卫星过近地点时刻1. 轨道半长轴,是椭圆长轴的一半。
2. 轨道偏心率,也就是椭圆两焦点的距离和长轴比值。
3. 轨道倾角,这个是轨道平面和地球赤道平面的夹角。
对于位于赤道上空的同步静止卫星来说,倾角就是0。
4. 升交点赤经:卫星从南半球运行到北半球时穿过赤道的那一点叫升交点。
这个点和春分点对于地心的张角称为升交点赤经。
5. 近地点幅角:这是近地点和升交点对地心的张角。
6. 过近地点时刻:卫星位置随时间的变化需要一个初值。
其中i、Ω、ω决定卫星轨道平面和长轴在空间的位置,而a、e、ζ可求出卫星在任何时刻在轨道上的位置。
1.2 TLE卫星星历TLE两行根数格式如下:AAAAAAAAAAAAAAAAAAAAAAAA1 NNNNNU NNNNNAAA NNNNN.NNNNNNNN +.NNNNNNNN +NNNNN-N +NNNNN-N N NNNNN2 NNNNN NNN.NNNN NNN.NNNN NNNNNNN NNN.NNNN NNN.NNNN NN.NNNNNNNNNNNNNN以国际空间站为例ISS (ZARYA)1 25544U 98067A 06052.34767361.00013949 00000-0 97127-4 0 39342 25544 051.6421 063.2734 0007415 308.6263 249.9177 15.74668600414901(1)第0行第0行是一个最长为24个字符的卫星通用名称,由卫星所在国籍的卫星公司命名,如SINOSAT 3。
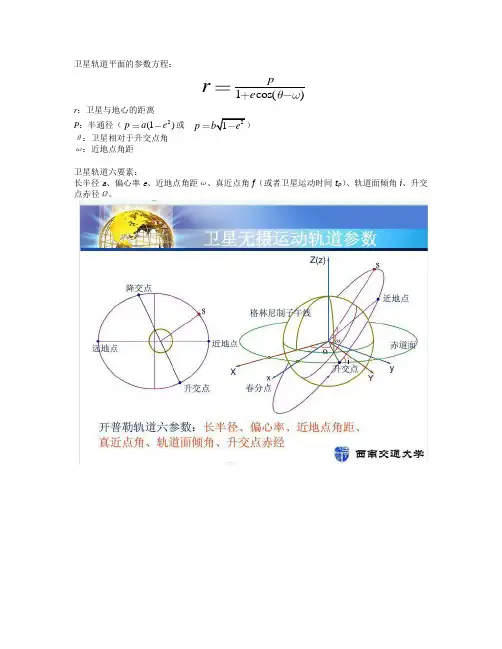
卫星轨道平面的参数方程:1cos()p e rr :卫星与地心的距离P :半通径(2(1)p a e 或21p b e ) θ:卫星相对于升交点角 ω:近地点角距卫星轨道六要素:长半径a 、偏心率e 、近地点角距ω、真近点角f (或者卫星运动时间t p )、轨道面倾角i 、升交点赤径Ω。
OXYZ─赤道惯性坐标系,X轴指向春分点T ;ON─卫星轨道的节线(即轨道平面与赤道平面的交线),N为升交点;S─卫星的位置;P─卫星轨道的近地点;f─真近点角,卫星位置相对于近地点的角距;ω─近地点幅角,近地点到升交点的角距;i─轨道倾角,卫星通过升交点时,相对于赤道平面的速度方向;Ω─升交点赤经,节线ON与X轴的夹角;e─偏心率矢量,从地心指向近地点,长度等于e;W─轨道平面法线的单位矢量,沿卫星运动方向按右旋定义,它与Z轴的夹角为i;a─半长轴;α,δ─卫星在赤道惯性坐标系的赤经、赤纬。
两个坐标系:地心轨道坐标系、赤道惯性坐标系。
地心轨道坐标系Ox0y0z0:以ee1为x0轴的单位矢量,以W为z0轴的单位矢量,y0轴的单位矢量可以由x0轴的单位矢量与z0轴的单位矢量确定,它位于轨道平面内。
赤道惯性坐标系:OXYZ,X轴指向春分点。
由地心轨道坐标系到赤道惯性坐标系的转换:1.先将地心轨道坐标绕W旋转角(-ω),旋转矩阵为R Z(-ω);2.绕节线ON旋转角(-i),旋转矩阵为R X(-i);3.最后绕Z轴旋转角(-Ω),旋转矩阵为R Z(-Ω);经过三次旋转后,地心轨道坐标系和赤道惯性坐标系重合。
在地心轨道坐标系中,卫星的位置坐标是:0 0 0cos sin 0x r f y r fz地心轨道坐标系到赤道惯性坐标系的转换关系是:000()()()cos cos sin cos sin sin cos cos cos sin sin sin cos =cos sincos cos sin sin sincos cos cos sin cos sin sin cos sin cos z x z x x y R R i R y z z i i i r f i i i i ii2sin 0cos sin()sin sin()cos(1)=sin cos()cos sin()cos 1cos sin()sin r f f f i a e f f ie ff i赤道惯性坐标系下的坐标确定后,可与r 、α、δ联系起来,关系式如下:1222()2arctan arctan(1)1cos 1cos y xz x y p a e re fe f若卫星六要素都已知,则可以解出α、δ。
卫星轨道动⼒学数值计算⽬录1星历计算的时间和坐标系统 (2)1.1 有关的时间系统与坐标系统 (2)1.1.1 时间系统及其换算 (2)1.1.2 坐标系统及其换算 (4)1.2 计算单位和有关常数 (7)2 轨道动⼒学计算的基本数学模型 (12)2.1 ⼆体问题 (12)2.2 地球⾮球形引⼒摄动 (12)2.3 ⽇、⽉摄动 (15)2.4 太阳直接辐射压摄动 (16)2.5 地球固体潮摄动 (19)2.6 ⼤⽓阻⼒摄动 (19)2.7 Y轴偏差加速度摄动 (20)2.8 巡航姿态控制动⼒摄动 (20)2.9 其它摄动影响 (21)附录:⽇⽉位置计算 (21)3 轨道计算⽅法 (24)3.1 Runge_Kutta积分法 (24)3.2 Adams_Cowell积分 (25)3.3 轨道计算 (27)3.4 星历的快速插值 (28)4 轨道根数与位置⽮量、速度⽮量的关系 (32)4.1 由位置⽮量和速度⽮量计算轨道根数 (32)4.2 由轨道根数计算位置⽮量和速度⽮量 (33)1星历计算的时间和坐标系统1.1 有关的时间系统与坐标系统轨道计算过程重要涉及到不同的时间系统和坐标系统,下⾯将空间战场环境系统中所涉及到的时间系统和坐标系统进⾏定义,并说明各系统之间的相互关系。
⼀般情况下,仿真系统采⽤的是TDT 时间系统和J2000地⼼惯性坐标系。
1.1.1 时间系统及其换算在轨道计算中,时间是独⽴变量。
但是,在计算不同的物理量时,却使⽤不同的时间系统。
例如:在计算恒星时⽤世界时UT1;定位解算时采⽤GPS 时GPST ;岁差和章动量的计算采⽤TDB 时等。
所以必须清楚各时间系统的定义和各时间系统之间的转换,下⾯给出各种时间系统的定义及它们之间的转换公式。
格林尼治恒星时格林尼治恒星时为春分点对格林尼治平天⽂⼦午⾯的时⾓。
由于岁差、章动原因,它由格林尼治真恒星时(GAST )和平恒星时(GMST )之分。
python 卫星轨道计算方法
计算卫星轨道的方法主要包括:
1. Kepler轨道计算方法:根据开普勒定律和质点运动定律,通过给定卫星的质量、轨道高度、轨道倾角、轨道周期等参数,可以计算出卫星在空间中的运动轨迹。
2. 近地点和远地点计算方法:对于椭圆轨道,可以通过计算卫星轨道的近地点和远地点来确定轨道形状。
3. 牛顿运动定律:根据牛顿第二定律和万有引力定律,可以计算卫星在重力场中的运动轨迹。
4. 非球形引力场校正:考虑地球的真实形状不是完全球形,可通过非球形引力场校正方法来修正卫星轨道计算的误差。
5. 数值积分方法:将卫星轨道计算问题转化为微分方程求解问题,利用数值方法(如欧拉法、四阶龙格-库塔方法等)进行积分计算,求得卫星轨道的数值解。
6. 非光滑运动轨迹计算方法:对于卫星在地球大气层中运动的情况,需要考虑空气阻力等非光滑因素,可以使用数值模拟方法进行计算。
卫星轨道动力学数值计算
1.轨道参数:卫星轨道计算需要确定卫星的轨道参数,如半长轴,轨道倾角,近地点角,升交点赤经等。
这些参数必须根据历元计算出来,以确定卫星在指定历元的轨道位置。
2.运动方程:对于卫星的运动,除了已知的轨道参数外,还需要建立一个基本的运动方程,用来描述卫星的运动。
3.动力学模型:动力学模型是用来描述卫星在太空中的运动方程的,可以根据引力加速度来建立运动方程,通过改变模型来模拟不同的太空环境。
4.时间序列:卫星轨道动力学数值计算时,还需要指定一定的时间序列,用来记录卫星在每个时刻的轨道位置,以及卫星在一段时间内的运动过程。
5.计算系统:所有这些参数和模型都需要一个程序来实现,该程序由运算程序和辅助程序组成,根据输入的轨道参数及时间序列,建立动力学模型,计算出卫星在指定时间内的轨道位置。
本文介绍了卫星轨道动力学数值计算方法的基本原理。
卫星轨道计算一、引言卫星轨道计算是指通过数学方法和物理原理,确定卫星在空间中运动的轨道参数的过程。
卫星轨道计算是卫星设计、发射和运行过程中的重要环节,对卫星的运行轨迹和通信效果具有关键影响。
本文将介绍卫星轨道计算的基本原理和方法。
二、卫星轨道的基本参数卫星轨道的基本参数包括轨道高度、轨道倾角、轨道形状和轨道周期等。
轨道高度指的是卫星离地球表面的距离,通常以千米为单位。
轨道倾角是指卫星轨道平面与赤道面之间的夹角,用度数表示。
轨道形状可以分为圆形轨道和椭圆轨道,圆形轨道是指卫星围绕地球运行的轨道是一个完全闭合的圆形,而椭圆轨道则是指卫星围绕地球运行的轨道是一个椭圆形。
轨道周期是指卫星绕地球一周所需的时间,通常以分钟为单位。
三、卫星轨道计算的方法卫星轨道计算的方法有多种,常用的方法包括开普勒方法、牛顿方法和数值积分方法等。
1. 开普勒方法开普勒方法是最早被使用的卫星轨道计算方法之一,它是根据开普勒的运动定律来计算卫星的轨道参数。
开普勒定律包括椭圆轨道的第一定律、第二定律和第三定律。
通过测量卫星的位置和速度,可以利用这些定律计算出卫星的轨道参数。
2. 牛顿方法牛顿方法是利用万有引力定律来计算卫星轨道的方法。
根据牛顿的万有引力定律,地球对卫星的引力和卫星的质量、速度和距离有关。
通过测量卫星的位置和速度,可以利用万有引力定律计算出卫星的轨道参数。
3. 数值积分方法数值积分方法是一种基于数值计算的卫星轨道计算方法。
通过将卫星的运动方程转化为数值计算的形式,利用计算机进行迭代计算,可以得到卫星的轨道参数。
数值积分方法在计算精度和计算效率方面具有优势,适用于复杂的轨道计算问题。
四、卫星轨道计算的应用卫星轨道计算在卫星设计、发射和运行过程中具有重要应用价值。
1. 卫星设计卫星轨道计算可以通过确定卫星的轨道参数,为卫星的设计提供基础数据。
根据卫星的任务需求和轨道参数,可以确定卫星的结构、推进系统和通信系统等设计参数。
轨道参数的计算方法轨道参数是用来描述天体在其运动轨道上运动状态的一组参数,对于天文学、航天学等领域来说具有重要的意义。
本文将介绍轨道参数的计算方法,帮助读者了解如何准确计算轨道参数。
一、轨道要素的基本概念轨道要素是描述天体运动轨道的基本参数,包括半长轴、轨道偏心率、轨道倾角、近地点幅角、升交点赤经等。
下面将依次介绍这些轨道要素的计算方法。
1. 半长轴(Semi-Major Axis)半长轴是指椭圆轨道中心到椭圆形状最长轴的一半长度,通常用字母a表示。
计算半长轴的方法可以根据已知的轨道周期T和引力常数G使用开普勒定律,公式为:a = (G * T^2 / 4π^2)^(1/3)其中G是引力常数,T是周期。
2. 轨道偏心率(Eccentricity)轨道偏心率是指椭圆轨道离心率的大小,它描述了天体轨道的圆形程度。
计算轨道偏心率的方法可以根据已知的轨道半长轴a和近地点距离r_min,使用公式:e = 1 - r_min / a其中e是轨道偏心率。
3. 轨道倾角(Inclination)轨道倾角是指天体轨道平面与参考面之间的夹角。
计算轨道倾角的方法可以根据已知的升交点赤经(RA)和升交点赤纬(DEC),使用公式:i = arccos(sin(DEC) * sin(ε) + cos(DEC) * cos(ε) * cos(RA))其中i是轨道倾角,ε是地球自转轴与黄道面的夹角。
4. 近地点幅角(Argument of Periapsis)近地点幅角是指天体运动轨道最靠近中心天体时,与升交点间的夹角。
计算近地点幅角的方法可以根据已知的近地点RA_peri和近地点DEC_peri,使用公式:ω = arctan2(sin(DEC_peri) * cos(ε) - cos(DEC_peri) * sin(ε) *cos(RA_peri), cos(DEC_peri) * sin(RA_peri))其中ω是近地点幅角。
卫星轨道平面的参数方程:
1cos(
)
p e r
r :卫星与地心的距离
P :半通径(2
(1)p a e 或21p b e ) θ:卫星相对于升交点角 ω:近地点角距
卫星轨道六要素:
长半径a 、偏心率e 、近地点角距ω、真近点角f (或者卫星运动时间t p )、轨道面倾角i 、升交点赤径Ω。
OXYZ─赤道惯性坐标系,X轴指向春分点T ;
ON─卫星轨道的节线(即轨道平面与赤道平面的交线),N为升交点;
S─卫星的位置;
P─卫星轨道的近地点;
f─真近点角,卫星位置相对于近地点的角距;
ω─近地点幅角,近地点到升交点的角距;
i─轨道倾角,卫星通过升交点时,相对于赤道平面的速度方向;
Ω─升交点赤经,节线ON与X轴的夹角;
e─偏心率矢量,从地心指向近地点,长度等于e;
W─轨道平面法线的单位矢量,沿卫星运动方向按右旋定义,它与Z轴的夹角为i;
a─半长轴;
α,δ─卫星在赤道惯性坐标系的赤经、赤纬。
两个坐标系:地心轨道坐标系、赤道惯性坐标系。
地心轨道坐标系Ox0y0z0:以e
e
1为x0轴的单位矢量,以W为z0轴的单位矢量,y0轴的单位矢量可以由x0轴的单位矢量与z0轴的单位矢量确定,它位于轨道平面内。
赤道惯性坐标系:OXYZ,X轴指向春分点。
由地心轨道坐标系到赤道惯性坐标系的转换:
1.先将地心轨道坐标绕W旋转角(-ω),旋转矩阵为R Z(-ω);
2.绕节线ON旋转角(-i),旋转矩阵为R X(-i);
3.最后绕Z轴旋转角(-Ω),旋转矩阵为R Z(-Ω);
经过三次旋转后,地心轨道坐标系和赤道惯性坐标系重合。
在地心轨道坐标系中,卫星的位置坐标是:
0 0 0
cos sin 0
x r f y r f
z
地心轨道坐标系到赤道惯性坐标系的转换关系是:
000
(
)()(
)cos cos sin cos sin sin cos cos cos sin sin sin cos =cos sin
cos cos sin sin sin
cos cos cos sin cos sin sin cos sin cos z x z x x y R R i R y z z i i i r f i i i i i
i
2
sin 0
cos sin(
)sin sin()cos
(1)
=
sin cos(
)cos sin()cos 1cos sin(
)sin r f f f i a e f f i
e f
f i
赤道惯性坐标系下的坐标确定后,可与r 、α、δ联系起来,关系式如下:
1
2
22
()2arctan arctan
(1)1cos 1cos y x
z x y p a e r
e f
e f
若卫星六要素都已知,则可以解出α、δ。
2x y z y x
z
r i r j r k
dr dr dr d i j
k dt dt dt dt
dr dr df h dr dt df dt r df
r
r v
另外一种解法:
1e P e ,单位矢量P 从地心指向近地点,将它沿卫星运动方向旋转900
就是半通径方向,它的单位矢量记为Q 。
有以下关系式:
cos sin 1
cos cos sin sin cos (
)()(
)0cos sin
sin cos cos 0sin sin 0sin cos cos sin cos ()()
()1sin sin
cos cos cos 0
cos s z x z z x z r f r f i R R i R i
i
i R R i R i r P Q
P
Q
in (
cos sin )(
sin cos )i
d dr
df
dr
df
f r f f r f dt
dt
dt
dt
dt
r v
P Q
2222
2(1)
(1)
(1)
22
21
(1)
()
sin (1cos )sin (cos )sin (cos )()
a e a e a e r
a
a e df r h h dt
dr e f dt df r
e f dt f e
f v
f
e f v P Q
为常数。