第七章粘弹塑性模型的基本概念
- 格式:docx
- 大小:346.33 KB
- 文档页数:26

弹性理论与塑性理论,弹性材料与塑性材料浅析经过一学期,弹性与塑性力学这门课程的学习结束了。
学习完弹性与塑性力学以后,我对弹性力学与塑性力学,弹性材料与塑性材料的区别与联系的认识进一步加深了。
首先谈一下有关弹性理论的基本知识。
弹性力学也称弹性理论,主要研究弹性体在外力作用或温度变化等外界因素下所产生的应力、应变和位移,从而解决结构或机械设计中所提出的强度和刚度问题。
在研究对象上,弹性力学同材料力学和结构力学之间有一定的分工。
材料力学基本上只研究杆状构件;结构力学主要是在材料力学的基础上研究杆状构件所组成的结构,即所谓杆件系统;而弹性力学研究包括杆状构件在内的各种形状的弹性体。
弹性力学是固体力学的重要分支,它研究弹性物体在外力和其它外界因素作用下产生的变形和内力,也称为弹性理论。
它是材料力学、结构力学、塑性力学和某些交叉学科的基础,广泛应用于建筑、机械、化工、航天等工程领域。
弹性体是变形体的一种,它的特征为:在外力作用下物体变形,当外力不超过某一限度时,除去外力后物体即恢复原状。
绝对弹性体是不存在的。
物体在外力除去后的残余变形很小时,一般就把它当作弹性体处理。
弹性力学所依据的基本规律有三个:变形连续规律、应力-应变关系和运动(或平衡)规律,它们有时被称为弹性力学三大基本规律。
弹性力学中许多定理、公式和结论等,都可以从三大基本规律推导出来。
连续变形规律是指弹性力学在考虑物体的变形时,只考虑经过连续变形后仍为连续的物体,如果物体中本来就有裂纹,则只考虑裂纹不扩展的情况。
这里主要使用数学中的几何方程和位移边界条件等方面的知识。
求解一个弹性力学问题,就是设法确定弹性体中各点的位移、应变和应力共15个函数。
从理论上讲,只有15个函数全部确定后,问题才算解决。
但在各种实际问题中,起主要作用的常常只是其中的几个函数,有时甚至只是物体的某些部位的某几个函数。
所以常常用实验和数学相结合的方法,就可求解。
数学弹性力学的典型问题主要有一般性理论、柱体扭转和弯曲、平面问题、变截面轴扭转,回转体轴对称变形等方面。
塑性力学的基本概念和应用塑性力学是力学学科中的一个重要领域,研究物体在超过其弹性限度之后发生的塑性变形和力学行为。
它在工程领域中有着广泛的应用,可以用于设计和分析各种结构和材料。
本文将介绍塑性力学的基本概念和应用。
一、塑性力学的基本概念塑性力学研究材料在受力过程中的变形行为,重点关注材料的塑性变形和它们与应力应变关系之间的联系。
以下是塑性力学中的几个基本概念:1. 弹性和塑性:在外力作用下,材料会产生变形。
当外力移除后,材料能够完全恢复到其初始形状,这种变形称为弹性变形。
而当外力作用超过了材料的弹性限度时,材料会发生不可逆的塑性变形,导致永久性的形变。
2. 屈服点和屈服应力:材料在受力过程中,当应力达到一定数值时会开始产生塑性变形,此时的应力称为屈服应力。
屈服点是应力-应变曲线上的一个特定点,表示材料开始发生塑性变形的阈值。
3. 工程应力应变和真实应力应变:工程应力指材料在不考虑变形前尺寸的情况下受到的力与单位面积的比值,工程应变指材料在变形前尺寸和力的情况下的应变与原始尺寸比值。
真实应力和真实应变则考虑了材料在受力过程中的变形,分别是力和应变与变形的比值。
二、塑性力学的应用塑性力学在工程领域中有着广泛的应用,以下是其中几个典型的应用。
1. 金属成形加工:塑性力学在金属成形加工中扮演着重要的角色。
通过了解材料的塑性特性和应力应变关系,可以优化金属成形加工的工艺参数,提高材料的形变能力,减小残余应力,提高产品质量。
2. 板结构设计:在板结构的设计中,塑性力学可以用于评估结构的稳定性和承载能力。
通过分析材料的屈服点和塑性变形情况,可以确定合适的结构尺寸和加强措施,以满足结构的强度和刚度要求。
3. 地震工程:塑性力学在地震工程中的应用也很重要。
通过研究材料的塑性行为,可以评估结构在地震荷载下的响应和潜在破坏模式。
这有助于设计出抗震性能良好的建筑和结构,并提供灾害防护措施。
4. 仿真和模拟:在产品设计和工艺优化中,塑性力学可以被应用于数值模拟和仿真。

金属材料的力学行为模型引言:金属材料在人类社会中扮演着重要的角色,广泛应用于建筑、交通、电子等领域。
研究金属材料的力学行为模型对于优化设计、材料选择和结构安全具有重要意义。
本文将探讨金属材料的力学行为模型,并介绍常用的弹性、塑性和粘弹性模型。
第一部分:弹性模型弹性模型用于描述金属材料在受力后恢复原状的能力。
最简单的弹性模型是胡克定律,它表明应力与应变成正比。
然而,金属材料的力学行为往往不符合线性弹性假设。
因此,工程领域常采用线性弹性模型、非线性弹性模型和弹塑性模型等。
线性弹性模型假设应力与应变呈线性关系,其中应力是单位面积上的力,应变是单位长度上的形变。
最常用的线性弹性模型是胡克-杨模型,它描述了金属材料的正弹性行为。
然而,在高应力下,金属材料的力学行为不再符合线性弹性假设。
第二部分:塑性模型塑性模型用于描述金属材料在超过弹性极限后的可塑性变形。
金属材料在受力时会出现塑性变形,即无法完全恢复原状。
晶体塑性理论是研究金属材料塑性变形的重要方法。
它基于晶体的滑移理论和晶体微弱滑移的条件。
其中,最常用的塑性模型是von Mises模型,它假设金属材料在达到屈服点后会开始塑性变形。
该模型描述了材料的屈服条件,并引入了流动准则来确定塑性变形发生的条件。
第三部分:粘弹性模型粘弹性是介于弹性和塑性之间的力学特性,用于描述金属材料在应力施加后的时间依赖性。
与弹性相比,粘弹性模型考虑了材料的时间依赖性。
常见的粘弹性模型包括粘弹性弹簧模型和粘弹性体模型。
粘弹性模型的研究包括应力松弛实验和应变迟滞实验。
这些实验揭示了金属材料在受力后的时间依赖性行为,为粘弹性模型的建立提供了实验基础和理论依据。
结论:金属材料的力学行为模型对于优化设计和结构安全具有重要意义。
本文介绍了金属材料的弹性、塑性和粘弹性模型,并讨论了它们的适用范围和应用。
在工程实践中,根据材料的具体情况选择适当的模型进行分析和设计是至关重要的。
希望本文的探讨能够为金属材料力学行为模型的应用提供一定的指导和启示。
材料力学中的非线性本构模型材料力学是许多工程领域的基础,它研究材料受力后的力学行为,包括力的大小、方向、分布和变形等问题。
不同材料的力学行为需要采用不同的本构模型来描述,常见的材料本构模型有线性弹性模型、非线性本构模型等。
本文将重点介绍材料力学中的非线性本构模型。
一、非线性本构模型的概念在材料力学中,当受力材料的变形与施加的力之间呈非线性关系时,就需要采用非线性本构模型来描述其力学行为。
非线性本构模型可以分为弹塑性模型、粘弹塑性模型、本质非线性模型等不同类型,其中弹塑性模型在实际应用中被广泛采用。
二、弹塑性模型弹塑性模型又称弹塑性本构模型,它是一种介于线性弹性模型和塑性本构模型之间的模型。
弹塑性模型假设材料的力学行为在一定范围内是线性弹性的,但在超出一定应力范围后就会出现不可逆变形,这种不可逆变形称为塑性变形。
弹塑性模型可分为单轴应力状态下的本构模型和多轴应力状态下的本构模型。
其中单轴应力状态下的本构模型包括拉伸本构模型、压缩本构模型等,多轴应力状态下的本构模型包括Mises本构模型、Drucker-Prager本构模型等。
三、拉伸本构模型拉伸本构模型是弹塑性模型中最简单的模型之一,它假设材料的力学行为在拉伸状态下是线性弹性的,且材料的强度随着应力增大而增大。
在达到材料的屈服点后,材料的强度就不再随应力增大而增大了,这时材料开始出现塑性变形。
拉伸本构模型将材料的应力-应变曲线分为弹性阶段和塑性阶段来描述材料的力学行为。
四、Mises本构模型Mises本构模型也称为圆锥形模型,它是多轴应力状态下最常用的弹塑性模型之一。
该模型假设材料的塑性行为是由等效应力和应力状态判据决定的,等效应力可以通过应力张量得到,应力状态判据则基于材料力学的实验性质,通过外部应力来得到。
Mises本构模型能够较为准确地描述材料在多轴应力状态下的力学行为,并在应用中获得广泛的应用。
五、Drucker-Prager本构模型Drucker-Prager本构模型是一种常用的粘塑性模型,它假设材料有两种塑性机制:一种是塑性流动,另一种是摩擦滑移。
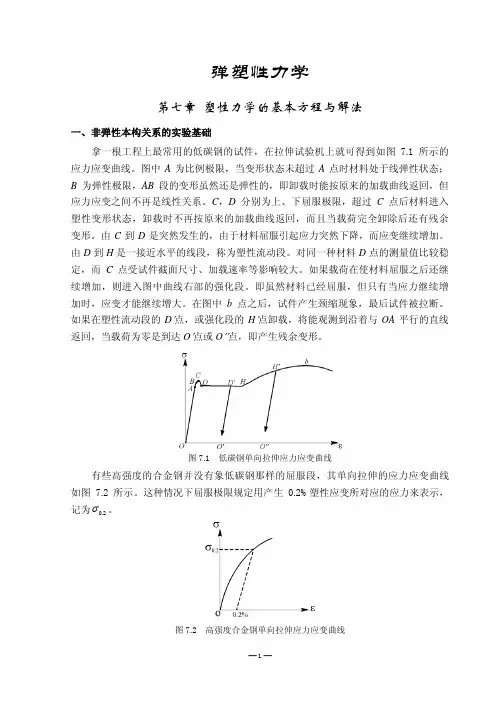
第七章 粘弹塑性模型的基本概念7 . 1 引言为了描述土体应力一应变关系受时间的影响,需要采用与时间有关的类模型(如粘弹胜模酬、粘塑性模型,粘弹塑隆模型)来描述土的性状。
弹性、塑性和粘性是连续介质的三种基本性质,各在定条件F 独自反映材料本构关系的一个方面的特性。
理想弹性模型、理想塑胜模型(或称刚塑性模型)和理想粘性模型是反映这三种性质的理想模型,通常称为简单模型。
实际工程材料的本构关系可以用这些简单模型的各种组合来构成。
理想弹性模型又称虎克弹性模型,通常用理想弹簧表示(图7-1( a ))。
其本构方程为虎克定律。
一维条件下,如单轴压缩和纯剪清况下,表达式分别为: E σε= (7.1.1)G τγ= (7.1.2)式中E —— 弹性模量、G ——剪切模量。
剪切模量与弹性模量和泊松比的关系如下式所示:()21E G ν=+ (7.1.3) 式中 ν ——泊松比。
三维条件下本构方程可表示为下述形式:m K νσε= (7.1.4)式中 K ——体积弹性模量。
(a ) (b )图7-1 理想弹性模型体积弹性模量与弹性模量和泊松比的关系如下式所示:()312E K ν=- (7.1.6) 理想粘性模型又称牛顿粘滞体模型。
通常用一粘壶(或称阻尼器)表示(图7-2 ( a ) )。
粘壶内充满粘滞液体和一个可移动的活塞。
活塞在粘滞液体中的移动速度与所受阻力成正比关系,反映了粘性介质内一点的应力与该点处应变速率成正比例关系的性质。
一维条件如单轴压缩或纯剪情况下,表达式分别为: σϕε= (7.1.7) τηγ= (7.1.8)式中 ϕ、η ——粘滞系数。
由上两式可以看出,从数学表达的形式上与理想弹性体单轴压缩和纯剪时的本构方程相类似。
与理想弹性体的方程相对应,类似式7.1.3,存在下述关系:()*21ϕην=+ (7.1.9)式中 *ν ——粘性应变速率的横向比值。
(a ) (b )图7-2 理想粘性模型 理想粘性体的体积变化与形状变化速率无关,即不具有体积粘性。
弹塑性有限元法基本理论与模拟方法弹性本构关系:弹性本构关系是描述材料的弹性行为的数学模型。
常见的弹性本构模型包括线性弹性模型和非线性弹性模型。
线性弹性模型假设应力与应变之间的关系是线性的,而非线性弹性模型则考虑了应力与应变之间的非线性关系,如Hooke定律和多项式模型等。
塑性本构关系:塑性本构关系是描述材料的塑性行为的数学模型。
常见的塑性本构模型有单一的本构模型和多线性本构模型。
单一本构模型假设应力与应变之间的关系是单调递增的函数,而多线性本构模型则将塑性行为分段描述,适用于复杂的应力和应变关系。
一般在工程中,弹性本构关系常与塑性本构关系相结合,用于模拟材料在加载过程中的弹性和塑性变形。
有限元方法:有限元方法是一种将连续介质离散成有限个子域,并建立一个代表离散网格的有限元模型进行求解的方法。
在弹塑性有限元方法中,将结构或材料划分成无限形状的有限个单元,每个单元都有一组本征坐标。
然后根据问题的对称性和几何形状,选择适当的数学模型,建立方程组。
模拟方法:在弹塑性有限元法中,首先要确定问题的边界条件,包括力、位移或边界反应。
然后,应用合适的数值方法,如有限差分法或有限元法,对弹塑性问题进行离散求解。
通常采用迭代法进行求解,不断更新单元应力和应变,直到达到一定的收敛准则。
在实际应用中,弹塑性有限元法可以用于模拟多种材料和结构的力学行为,如金属、混凝土、岩土、复合材料等。
通过合理选择材料模型和有限元网格,可以准确地模拟材料的应力、应变分布以及变形情况。
总之,弹塑性有限元法是一种基于有限元法的理论框架,用于模拟材料和结构在加载过程中的弹性和塑性行为。
它包括弹性本构关系、塑性本构关系、有限元方法和模拟方法等几个方面,可以应用于各种材料和结构的力学分析和设计中。
一般力学与力学基础的弹塑性分析方法弹塑性分析方法是一般力学和力学基础中重要的研究领域之一。
本文将介绍弹塑性分析方法的基本概念、应用领域以及常用的数学模型和计算方法。
一、弹塑性分析方法的基本概念弹塑性分析方法是一种综合运用弹性力学和塑性力学理论的方法,用于描述材料在外力作用下的弹性变形和塑性变形过程。
在弹塑性分析中,材料会先发生弹性变形,当应力达到一定临界值时,开始发生塑性变形。
弹塑性分析方法可以更准确地预测材料的变形和破坏行为。
二、弹塑性分析方法的应用领域弹塑性分析方法广泛应用于工程结构、土力学、岩石力学等领域。
例如,在工程结构的设计中,使用弹塑性分析方法可以预测结构在外载荷作用下的变形和破坏行为,从而确定结构的合理尺寸和材料强度要求。
在土力学和岩石力学中,弹塑性分析方法可以用于预测土体和岩石的变形和破坏特性,为工程施工和地质灾害的预测提供依据。
三、弹塑性分析的数学模型弹塑性分析方法使用了多种数学模型来描述材料的力学行为。
其中常用的模型包括线性弹性模型、单一参数塑性模型和本构模型等。
1. 线性弹性模型:线性弹性模型假设材料的应力与应变之间呈线性关系,常用于描述小应变范围内的材料行为。
2. 单一参数塑性模型:单一参数塑性模型假设材料的塑性行为由一个参数来描述,常用于描述中等应变范围内的材料行为。
3. 本构模型:本构模型是更为复杂的数学模型,可用于描述广泛的材料行为。
常见的本构模型包括弹塑性本构模型、弹塑性本构模型、弹粘塑性本构模型等。
四、弹塑性分析的计算方法弹塑性分析方法使用了多种计算方法来求解材料的变形和应力分布。
其中常用的计算方法包括有限元法、边界元法和等。
这些方法可以将实际结构离散成有限个子区域,通过求解子区域的变形和应力,得到整个结构的变形和应力分布。
这些计算方法具有高精度和较强的通用性,广泛应用于工程和科学研究领域。
综上所述,弹塑性分析方法是一般力学和力学基础中重要的研究领域,用于描述材料在外力作用下的弹性变形和塑性变形过程。
弹塑性力学基础与材料变形分析弹塑性力学是力学中的一个重要分支,研究物体在外力作用下的变形和应力响应。
材料的变形分析则是根据弹塑性力学理论,对材料在外力作用下的变形行为进行研究和分析。
本文将介绍弹塑性力学的基础概念和理论,并探讨材料变形分析的方法和应用。
1. 弹性力学基础在弹塑性力学中,弹性是指物体在外力作用下发生的可恢复变形。
弹性力学的基本定律是胡克定律,它描述了物体的应力与应变之间的关系。
根据胡克定律,线性弹性材料的应力与应变呈线性关系,即应力等于弹性模量与应变的乘积。
除了胡克定律,还有切应力与切变变形之间的关系由牛顿黏性定律给出。
2. 塑性力学基础与弹性力学不同,塑性力学是描述物体在外力作用下发生的不可恢复变形的力学学科。
塑性力学的基本理论是流变学,它研究物体在外力作用下的蠕变行为。
塑性变形通常会导致材料内部的晶格滑移和塑性畸变。
在材料受到足够大的应力时,塑性变形将取代弹性变形。
3. 弹塑性力学弹塑性力学是弹性力学和塑性力学的结合,用于描述物体在外力作用下同时发生弹性和塑性变形的情况。
在弹塑性力学理论中,材料的应力应变关系一般采用应力-应变本构关系来表示。
应力-应变本构关系通常是非线性的,可以根据具体材料的特性进行模型建立。
常见的弹塑性本构模型有弹塑性理想化塑性模型和弹塑性可生长模型等。
4. 材料变形分析方法材料变形分析是基于弹塑性力学理论的数值模拟方法,用于预测材料在外力作用下的变形行为。
常用的材料变形分析方法包括有限元法、有限差分法和有限体积法等。
这些方法可以通过研究材料的应力分布、应变分布和位移分布等来揭示材料的本构特性和变形机理。
材料变形分析方法在工程设计和材料选择等方面起着重要的作用。
5. 材料变形分析的应用材料变形分析在工程领域有广泛的应用。
例如,在机械设计中,通过材料变形分析可以预测零件在使用过程中的变形量,以及材料是否会发生塑性变形,从而指导设计者选择合适的材料和结构。
此外,材料变形分析也可以用于材料的疲劳寿命预测、变形加工工艺的优化和材料损伤分析等方面。
材料力学中的弹塑性本构模型建立在工程和力学实践中,弹塑性是一种非常重要的材料本构模型。
它能够对许多材料的力学性能进行准确预测,因此在设计和分析中得到广泛应用。
本文将介绍弹塑性本构模型的基本概念和建立方法。
一、弹塑性基本概念弹塑性是一种材料可能表现出的力学特性,它包括两个不同的行为:弹性和塑性。
弹性是指材料恢复原来形状和大小的能力,这是由于分子等微观结构的作用而产生的。
而在材料接受持续变形时,会发生形变不可逆的情况。
这种现象被称为塑性。
当材料被施加应力时,如果应力不超过一定范围,材料会发生弹性形变;一旦应力超过一定界限,材料就会发生塑性变形。
材料的弹塑性是由其微观结构决定的,因此不同的材料会表现出不同的弹塑性特性。
二、弹塑性本构模型的基本原理弹塑性本构模型是描述材料弹塑性问题的一类物理模型。
它基于能量守恒原理,建立材料固体在应力和应变作用下的不同状态之间的关系。
本构模型的目的是把材料行为和材料力学特性建立起来,便于进行物理和工程分析。
所以在材料力学中,弹塑性本构模型是一个非常重要的基本理论。
材料弹塑性本构模型的建立过程包含以下三个步骤。
1. 实验数据获取该步骤是建立弹塑性本构模型的基础。
通过物理实验,可以得到材料的应力-应变曲线,即通过外力施加不同载荷,测量材料在相应的应力状态下的应变表现。
从这些实验数据中可以得到材料的力学特性。
2. 建立本构关系本构关系是弹塑性本构模型中最基本的方程。
它建立材料中的形变应力与形变大小和方向之间的关系。
大多数情况下,本构关系并不只是一个公式,而是一系列方程的集合,不同的方程适用于不同的材料。
在建立本构关系时,通常需要将材料划分为一定数量或限制条件下的应力状态,并在这些状态下建立相应的方程形式。
然后,通过插值或其它数值方法可以精确地计算出材料弹塑性的行为。
3. 参数确定弹塑性本构模型的参数是过程中最难确定的部分。
参数在本构模型中的作用类似于提供具体材料的物理性质或形状。
第七章粘弹塑性模型的基本概念7 . 1 引言为了描述土体应力一应变关系受时间的影响,需要采用与时间有关的类模型(如粘弹胜模酬、粘塑性模型,粘弹塑隆模型)来描述土的性状。
弹性、塑性和粘性是连续介质的三种基本性质,各在定条件F独自反映材料本构关系的一个方面的特性。
理想弹性模型、理想塑胜模型(或称刚塑性模型)和理想粘性模型是反映这三种性质的理想模型,通常称为简单模型。
实际工程材料的本构关系可以用这些简单模型的各种组合来构成。
理想弹性模型又称虎克弹性模型,通常用理想弹簧表示(图7-1( a ))。
其本构方程为虎克定律。
一维条件下,如单轴压缩和纯剪清况下,表达式分别为:E(7.1.1)G (7.1.2)式中E——弹性模量、G剪切模量。
剪切模量与弹性模量和泊松比的关系如下式所示:G E—(7.1.3)2 1式中——泊松比。
三维条件下本构方程可表示为下述形式:(7.1.4)m K式中K ——体积弹性模量。
(a) (b)图7-1理想弹性模型体积弹性模量与弹性模量和泊松比的关系如下式所示:(7.1.6)理想粘性模型又称牛顿粘滞体模型。
通常用一粘壶(或称阻尼器)表示(图7-2 ( a ))。
粘壶内充满粘滞液体和一个可移动的活塞。
活塞在粘滞液体中的移动速度与所受阻力成正比关系,反映了粘性介质内一点的应力与该点处应变速率成正比例关系的性质。
一维条件如单轴压缩或纯剪情况下,表达式分别为:&(7.1.7)& (7.1.8)式中、——粘滞系数由上两式可以看出,从数学表达的形式上与理想弹性体单轴压缩和纯剪时的本构方程相类似。
与理想弹性体的方程相对应,类似式7.1.3,存在下述关系:(7.1.9)理想粘性体的体积变化与形状变化速率无关,(7.1.10)这与弹性不可压缩时的E=3G 相对应。
在三维条件下理想粘性体本构方程可表示为:(7.1.11)理想塑性模型又称Saint-Venant 塑性模型,或称刚塑性模型。
通常采用 两块接触的粗糙面表示(图7-3 (a ))。
面上存在有一称晰脚擦阻力,与作用 在面上的法向压力无关,是一常数。
若外作用力心婚此起始摩擦阻力,物体不发 生变形。
一维条件如单轴压缩或此钾扮况,当轴向应力或剪应力小于某一数值时, 物体不发生变形.当软祠应力或剪应力等于某数值时, 物体产生流动,变形无限 制增长.理想塑性模刮的体积应变等于零, 即体积不发生改变。
在三维条件下理 想塑性体的本构方程可表示为:式中 粘性应变速率的横向比值。
(a )即不具有体积粘性。
因此,应等于0.5 于是式7.1.9成为:S j 图7-2理想粘性模型式中H j ——起始摩擦阻力,或称塑性条件;――比例常数。
式7.1.12表明,理想塑性体的塑性应变偏量的变化率与应力偏量成正比由理想弹性模型、理想粘性模型和理想塑性模型等简单模型可以组合成许多 复杂模型。
由理想弹性模型和理想塑性模型可以组合成理想弹塑性模型。
由弹性模(a )(b )图7-3理想塑性体模型当qm 时,列o]当Sj可时,S j 2 & J(7.1.12 )型和粘性模型可以组合成各种粘弹性模型。
由粘性模型和塑性模型可以组合成各种粘塑性模型。
由弹性模型、粘性模型和塑性模型可以组合成各种粘弹塑性模型。
理想弹塑性模型已在第六章作了介绍。
在以下几节将对几种由简单模型组成的粘弹性模型、粘塑性模型和粘弹塑胜模型作简单介绍。
利用简单模型可以组合成各种复杂模型,从而可以建立各种材料的本构方程。
但是进一步的研究发现,许多材料的实际性状并不能满意地用简单的组合模型来描述,而目采用复杂的组合模型又常遇到数学上的困难。
因此,常常在试验的基础上,通过假设一实验一理论的方法建立材料的本构力程。
在本章的最后一节将简要介绍描述材料蠕变现象的蠕变力程。
7 . 2 粘弹性模型既具有弹性又具有粘性的性质称为粘弹性。
蠕变和应力松弛现象是人们熟悉的也是特别受重视的粘弹性胜质粘弹性性质的特点是在本构方程中除了有应力和应变项外,还包括有它们对时间导数的项。
对线性粘弹胜材料,其本构方程的一般表达式为:mna0 a1 &L a m b0 b1&L b n (7.2.1 )式中a i ,b i ——与材料性质有关的参数。
下面首先介绍几种简单的粘弹性模型,然后再介绍较复杂的情况。
7.2.1Maxwell 模型Maxwell 模型又称松弛模型。
它是由线性弹簧和牛顿枯壶串联组成,如图7 -4 (a )所示。
在串联条件下,作用在两元件上的应力相同,而总的应变应为两个元件应变的和,即(7.2.2 )或& & & (7.2.3 )式中, ——分别为线性弹簧和粘壶的应变;&, & ——分别为线性弹簧和粘壶的应变率。
考虑到线性弹簧有& &E 和牛顿粘壶有& / ,则式723可改写成:图 7-4 Maxwoll 模型写成如式7.2.1的标准形式,上式可改写为:n& & (7.2.5) 式中n ――松驰时间,n 己,量纲为时间。
式7.2.5 称为Maxwell 方程。
若物体获得初始应变 °以后总应变保持不变(图7-4b ),即& 0,式7.2.5成为:n& 0(7.2.6)积分上式,得Ce t/n( 7.2.7)式中C ——积分常数。
应用初始条件,t 0, 0代人式7.2.7解出C ,再代人式7.2.7 , 得t/n 0e(7.2.8 )式7.2.8表示,Maxwell 模型在保持总应变不变的条件下,发生应力随时间衰减 的松弛现象,如图7-4c 所示。
若物体获得初始应力°以后,保持应力不变,即 & 0,则式7.2.5成为:(729 )(7.2.4)[T(a )(c )E(b )式7.2.9表示材料应变率为常数,即应变随时间成比例地增长,因此变形随时间无限地发展。
下面讨论松弛试验的情况。
在松弛试验中,首先对试件施加应变°,然后保持应变为定值,进而测量作为时间函数的应力值,确定松弛规律。
松弛试验中应变可记为:u t (7.2.10)式中u t ——单位阶梯函数。
单位阶梯函数定义为:0,t t iu t t i (7.2.11)1, t t i在松弛试验中t10 u t t1可表示为u t。
将式7.2.10 代人式7.2.5,得E t(7.2.12)& 一n式中t ――脉冲函数, d t u t 。
dt脉冲函数定义为:7.2.13)t0,t 0(,t 0tt dt 1(7.2.14)脉冲函数具有下述性质,对于任何连续函数ft,当t右时,有tf t1 d f t1 u t t1 (7.2.15)利用式7.2.15,积分式7.2.12,可得t E 0e t/n u t (7.2.16)式7.2.16表示Maxwell模型的应力松弛规律,简记为:t t 0 (7.2.17)式中t ——松弛函数,其表达式为E 0常量 (7.2.22)t/nt Ee u t722 Kelvl n模型Kelvln 模型又称非松弛模型。
这种模型曾由 W . Voigt 和Kelvin 提出,故又称为Voigt — Kelvin 模型。
它是由线性弹簧和牛顿粘壶并联组成,如图7-5(a )所示。
在并联条件下,两个元件的应变相同,而总的应力应为两个元件的应 力之和,即(7220)积分上式,得(7218 )(7219)若在t 0时,瞬时地加上应力,并保持不变,则由式7.2.19可得式中 由式7.2.21可知,当t 若物体获得初始弹性应变之后保持应变不变,即& 0。
由式7.2.19得(a )滞后时间。
rLaaf衰减系数,,应变趋于个稳定值 0/E 。
上式表明在这种情况下应力不衰减。
下面讨论蠕变试验的情况。
在蠕变试验中,首先对试件施加应力 保持应力为定值来量取作为时间函数的应变值。
若取瞬时加载的时刻为t 0 ,则 加载过程可表示为:oU t(7223)式中 u t ——单位阶梯函数。
将式7.2.23 代人式7.2.19,得& —u t注意到单位阶梯函数有如下性质t tf u t | d u 1ft1d(7.2.25)此处 为积分变量。
积分式7.2.24, 得t1 Ee t u t (7.2.26)式中1 E_ n式 7.2.26 表示 Kelvin 模型的蠕变规律, 可简记为:tt(7.2.27)式中t蠕变函数。
蠕变函数的表达式为1 t - 1Ee t u t(7.2.28)7.2.3三元件粘弹性模型图7-6a 表示个三元件粘弹性模型。
它是由线性弹簧和Kelvin 模型串联组成,包括二个线性弹簧和一个牛顿粘壶, 共三个元件,故称三元件粘弹性模型。
用表Kelvin 模型的应变,表示与Kelvin 模型串联的线性弹簧的应变,表示Kelvin 模型中线性弹簧中的应力,表示牛顿粘壶中的应力,和分别表示总应力和总应变。
分析各元件的应力或应变相互间关系,不难得到下列各式:(7.2.29),然后(7224)(7230 )(7231 )E (7.2.32 )(7.2.33 )式中E ――与Kelvin模型串联的线性弹簧的弹性模量;E ―― Kelvin模型中线性弹簧的弹性模量;――牛顿粘壶的粘滞系数。
结合式7.2.29至式7.2.33各式,消去组成元件中的应力和应变,得E E & EE E & (7.2.34)式7.2.34还可改写为:n& nH & E ( 7.2.35)式中n (7.2.36)E ErLiia厂壬图7-6三元件粘弹性模型上式表示的应变随时间的变化规律如图 7-6 (b )所示。
图中应变起始值为 /H , 最终值为/ E ,其应变速率由起始时的最大值逐渐趋于零。
若物体获得初始弹性应变最初的H 0衰减到最终值E 0传函数,它表示在 时刻作用的应力对时刻t 的变形的影响。
H EE E E •E E若物体作用有初始应力,且保持不变,即&于是,由式7.2.35可求得应变的变化规律为:H E 彳-- ----------- 1 e H HE(7237) (7238)0 ,且在t 0时,/H 。
Et/Hn(7239 )后总应变保持不变,即,& o 且在t 0时,H 0。
于是,由式7.2.35可求得应力随时间的变化规律为:E t/nH E °e(7240)上式表示的应力变化规律如图7-6 (b )所示。
由图可以看到,物体中的应力从若物体初始时作用有应力以后随时间变化作用有应力t 。
根据叠加原理,由式7.2.39可以得到在时刻t 时物体的变形, 」H E 1 0 1 H HEe Et/Hn H E 」 E t /Hn HE(7241)对上式右端进行分部积分,则式7.2.42可改写为H 2nH E H 2n/Hn(7242)(7243)(7244)式7.2.44通常称为线性遗传方程。