Carsim整车建模的参数
- 格式:docx
- 大小:15.94 KB
- 文档页数:14

基于CarSim的整车动力性建模张绅山东省潍坊市潍坊学院 山东省潍坊市 261061摘 要: C arSim软件是一款越来越受到汽车研发人员喜爱的一款汽车仿真软件,利用软件对汽车进行整车建模以及仿真测试,可以通过三维动画或者数据图表分析仿真结果,从而便于汽车研发人员提升汽车的各项性能。
本文是针对汽车动力性进行建模仿真,文章首先对CarSim软件进行了简单介绍以及简单的使用教学,介绍了汽车动力性研究意义、影响因素及评价指标等相关内容,最后介绍了CarSim中车辆的各个部分参数设置问题。
关键词:CarSim;动力性;整车建模;仿真1 CarSim软件介绍1.1 CarSim软件的简介CarSim是一款专门针对中小型汽车的仿真软件,软件在本质上就是先建立一个车辆模型,再根据自己的仿真内容进行参数设置,处理器运算以后通过3D动画或表格数据展示仿真结果。
利用CarSim在计算机上进行模拟仿真速度比实际测试实验速度快许多倍,软件可以用来仿真车辆对驾驶员、地面情况等输入的响应,主要用来帮助提升汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性。
现如今CarSim凭借自身的优势已经逐渐被更多研发人员所应用。
CarSim软件系统可以与许多软件共同进行模拟仿真,例如CarSim和Simulink的协同仿真,从Simulink的各种变量中选择需要的导入到CarSim中进行模拟仿真,变量包括车辆控制输入、轮胎力和力矩、弹簧和阻尼力、转向系统驱动角度、传动系扭矩、制动扭矩和制动压力、空气动力学相关变量等超过160个变量。
CarSim建模和仿真后的数据也可以导出到其他模拟软件作为数据源进行模拟仿真和数据分析。
1.2 CarSim软件的组成CarSim的主界面非常简单,整体可分为三个部分:预处理、处理和后处理。
左侧是设置模型参数和测试条件的预处理,包括车辆参数设置(车身,空气动力学,传动系统,制动系统,转向系统,前后悬架系统和车轮等),仿真环境,测试条件除此之外下拉菜单还有其他更具体的参数可以设置。

Carsim整车建模参数一车体空载情况下的车体信息(1) 簧上质量的质心距前轴的距离mm (2) 簧上质量质心距地面的高度mm (3) 轴距mm(4) 质心的横向偏移量mm(5) 簧载质量kg(6) 对x轴的极惯性矩(lxx)kg-m2 (7) 对y轴的极惯性矩(lyy)kg-m2 (8) 对z轴的极惯性矩(lzz)kg-m2 (9) 对x、y轴的惯性积(lxy)kg-m2 (10) 对x、z轴的惯性积(lxz)kg-m2 (11) 对y、z轴的惯性积(lyz)kg-m2二空气动力学(1) 空气动力学参考点X mm(2) 空气动力学参考点Y mm(3) 空气动力学参考点Z mm(4) 迎风面积 m21(5) 空气动力学参考长度 mm(6) 空气密度 kg/m3(7) CFx(空气动力学系数)与slip angle (行车速度方向与空气流动方向的夹角)的关系(8) CFy与slip angle的关系(9) CFz与slip angle的关系(10) CMx与slip angle的关系(11) CMy与slip angle的关系(12) CMz与slip angle的关系三传动系1 最简单的一种(1) 后轮驱动所占的比值,为1时,后轮驱动;为0时,前轮驱动(2) 发动机的功率KW2 前轮驱动或后轮驱动1)发动机特性(1) 各个节气门位置下,发动机扭矩(N-m)与发动机转速(rpm) 的2关系(2) 打开节气门的时间迟滞sec(3) 关闭节气门的时间迟滞sec(4) 曲轴的旋转惯量kg-m2(5) 怠速时发动机的转速rpm2)离合器特性a 液力变矩器(1) 扭矩比(输出比输入)与速度比(输出比输入)的关系 (2) 液力变矩器的参数1/K与速度比(输出比输入)的关系 (3) 输入轴的转动惯量kg-m2(4) 输出轴的转动惯量kg-m2b 机械式离合器(1) 输出的最大扭矩(N-m)与离合器接合程度(0代表完全结合,1代表完全分离)的关系(2) 接合时间迟滞sec(3) 分离时间迟滞sec(4) 输入轴的转动惯量kg-m2(5) 输出轴的转动惯量kg-m23)变速器(1) 正向挡位和倒挡的传动比,转动惯量(kg-m2),正向传动与反3向传动效率(2) 中间挡的转动惯量(kg-m2)(3) 换挡时间sec(4) 各个挡位中低速齿轮的输出转速(rpm)与节气门开口位置的关系4)差速器(1) 左右车轮扭矩差(N-m)与车轮速度差(rpm)的关系 (2) 抗扭刚度N-m/deg(3) 抗扭阻尼N-m-s/deg(4) 传动比(5) 正反向的传动效率(6) 驱动轴的惯性量kg-m2(7) 半轴到左侧车轮的惯性量kg-m2(8) 半轴到右侧车轮的惯性量kg-m2还包括传动系(不包括发动机)的自然频率(Hz)与阻尼率3 四轮驱动与前轮驱动相比,增加分动箱,其中包括:(1) 前后轴的扭矩差(N-m)与前后轮的转速差(rpm)的关系 (2) 分配到后轮上的扭矩(百分比形式)4(3) 传动比(4) 扭杆刚度N-m/deg(5) 扭杆阻尼N-m-s/deg还包括传动系的正效率与逆效率四制动系统1 简单制动系统(1) 制动力矩(N-m)与车轮汽缸压力(MPa)的关系,分左前轮,右前轮,左后轮,右后轮,为一比例常数或一条变化曲线 (2) 比例阀之后的管路压力(MPa)与其输入压力(MPa)的关系,分左前轮,右前轮,左后轮,右后轮,通常为一比例常数(3) 流体动力学时间常数,包括左前,右前,左后,右后,单位为sec (4) 流体迟滞,包括左前,右前,左后,右后,单位为sec (5) 前后车轮ABS工作的滑移率区间(6) ABS工作截止的最低速度km/h(7) 经ABS控制后输出的压力MPa2 考虑助力与热衰退的制动系统(1) 比例阀输出压力(Mpa)与比例阀输入压力(Mpa)的关系,包5括左前,左后,右前,右后(2) 制动盘质量kg(3) 在0摄氏度时制动盘的比热kJ/kg/C(4) 单位温度升高比热的变化量kJ/kg/C2(5) 制动钳压力(MPa)与制动钳体积(mm3)的关系 (6) 制动钳气缸中单位流量所产生的压力MPa/(mm3/s) (7) 冷却系数(1/s)与车辆速度(km/h)的关系(8) 不同制动盘温度(C)下,制动力矩(N-m)与制动轮缸压力(Mpa)的关系(9) 控制策略(A型为调节主缸后的压力值;B型为调节比例阀后的管路压力;也可不控制)(10) 四个车轮的制动盘初始温度(C)(11) 空气温度(C)(12) 助力后输出的力(N)与助力前输入的力(N)的关系,助力后输出的力为主缸压力(13) 踏板的杠杆比(14) 主缸直径mm(15) 启动助力的时间迟滞sec(16) 关闭助力的时间迟滞sec6五转向系统1) 转向柱管系统:(1) 转向柱管的惯性kg-m2(2) 转向系统的惯量kg-m2(3) 转向柱管阻尼Nm-s/deg(4) 转向柱管干摩擦N-m(5) 转向盘自由角行程deg2) 主销的几何特性:(1) 汽车前进方向投影,主销轴线与半轴轴线的交点距车轮中心的距离mm,包括四个车轮(2) 主销内倾角deg(3) 主销后倾角deg(4) 水平路面行驶,汽车侧面投影中,车轮质心所驶过的直线与主销轴线的交点距车轮中心的距离mm3) 前轮转向方式包括非助力齿条齿轮式和循环球式,助力齿条齿轮式和循环球式助力齿条齿轮式(1) 齿条的行程(mm)与齿轮转角(deg)的关系 (2) 左右转向轮转角(deg)与齿条的行程(mm)的关系7(3) 因转向系统柔性所引起的转向角(deg)随主销力矩(N-m)的关系,主销力矩为左右主销力矩之和。

汽车动力学模型基础方程在汽车工程中,动力学模型是一个重要的概念,它描述了汽车在运动过程中的力学特性和行为。
其中,汽车动力学模型的基础方程起着至关重要的作用,它们是描述汽车动力学特性的数学表达式,是汽车工程中的核心理论基础。
一、运动方程汽车在运动中受到多种力的作用,这些力包括牵引力、阻力、重力等。
通过牛顿第二定律,可以得到描述汽车运动的基本方程:F = ma其中,F是受到的合外力,m是汽车的质量,a是汽车的加速度。
根据牵引力、阻力和重力的关系,可以得到更加细致的运动方程:F_traction - F_drag - F_roll - F_grade = ma其中,F_traction是牵引力,F_drag是阻力,F_roll是滚动阻力,F_grade是上坡或下坡时产生的力。
这些力可以通过具体的公式计算得到,从而得到汽车的加速度。
二、转向方程在汽车运动中,转向是一个重要的问题。
汽车的转向能力与转向系的设计和轮胎的特性有关。
描述汽车转向行为的基础方程可以通过转向角速度、侧向力和横摆刚度等参数建立,具体方程如下:Mz = Iz * ωz + Fy * a其中,Mz是横摆力矩,Iz是车辆绕垂直轴的惯性矩,ωz是车辆的横摆角速度,Fy是轮胎的侧向力,a是车辆的横向加速度。
这个方程描述了汽车在转向过程中受到的各种力的平衡关系。
三、刹车方程刹车是汽车行驶中不可或缺的部分,汽车刹车性能与刹车系统、轮胎和路面特性等有关。
汽车刹车性能的基础方程可以描述如下:Fbrake = μ * Fz其中,Fbrake是刹车力,μ是刹车系数,Fz是轮胎受力。
刹车系数与刹车系统和轮胎的摩擦特性有关,它是刹车性能的一个重要参数。
总结通过以上的分析可以看出,汽车动力学模型的基础方程是汽车工程中的核心内容,它涉及到多个力学和运动学的概念,并且需要深入的数学和物理知识。
汽车动力学模型的基础方程不仅对汽车设计和优化具有重要意义,对于理解汽车行驶过程中的各种力学特性也有着重要意义。


农业装备与车辆工程2015年基金项目:国家自然科学基金青年基金资助项目(51305190);辽宁省教育厅项目(L2013253)收稿日期:2015-03-30修回日期:2015-04-12doi :10.3969/j.issn.1673-3142.2015.07.002基于CarSim 的四轮轮毂电机电动汽车建模方法研究马高峰,李刚,韩海兰(121001辽宁省锦州市辽宁工业大学汽车与交通工程学院)[摘要]针对四轮轮毂电机电动汽车控制算法验证需要,基于CarSim 和Simulink 搭建了四轮轮毂电机电动汽车模型。
将CarSim 传统内燃机汽车模型修改为四轮独立驱动汽车模型,应用Simulink 搭建电机模型,进行CarSim 和Simulink 联合仿真建立四轮轮毂电机电动汽车模型,并通过仿真实验对模型进行了验证。
验证表明,电机模型和电动汽车模型均具有良好的响应特性,模型搭建合理;该模型为以后控制算法的研究奠定了良好基础。
[关键词]轮毂电机;电动汽车;CarSim ;Matlab/Simulink ;建模仿真[中图分类号]U469.72[文献标志码]A[文章编号]1673-3142(2015)07-0008-04Simulation Model Research for Four-wheel Hub Motor Electric Vehicle Based on Simulink and CarSimMa Gaofeng ,Li Gang ,Han Hailan(Automobile and Traffic Engineering College ,Liaoning University of Technology ,Jinzhou City ,Liaoning Province 121001,China )[Abstract ]For the need of verifying the four-wheel hub motor electric vehicle control algorithm research ,with CarSim andMatlab /Simulink ,a four-wheel hub motor electric vehicle model was established.Traditional combustion engines vehicle model was altered to four-wheel-drive electric vehicle model by CarSim ,electrical machine was developed based on Matlab /Simulink.Four-wheel hub motor electric vehicle model was established with Matlab /Simulink and CarSim ,and the model was verified by simulation experiment.The results show that the electrical machine and electric vehicle model have good response characteris-tics ,the model is rational ,which can be used as a good platform for the control algorithm improvements and validation.[Key words ]hub motor ;electric vehicle ;CarSim ;Matlab /Simulink ;modeling and simulation0引言目前,环保和节能的问题备受关注。
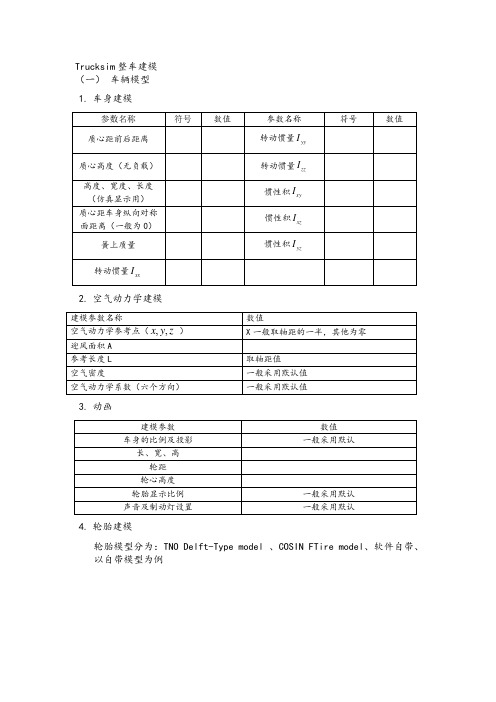
Trucksim整车建模(一)车辆模型1.车身建模2.空气动力学建模3.动画4.轮胎建模轮胎模型分为:TNO Delft-Type model 、COSIN FTire model、软件自带、以自带模型为例5.转向盘力矩转向盘力矩和主销力矩之间的关系曲线默认值1/20、1/256.动力总成驱动形式:前驱、后驱、四驱、速度控制,其中速度控制通过PID控制来调节车速,没有传动系统,无法做动力性、经济性的仿真,但可以做例如操纵稳定性的仿真。
发动机:外部模型(例如Simulink种的模型)、内置模型离合器:内部液力变矩器、外部液力耦合器、内置离合器变速器:内部模型、外部模型差速器:外部模型、内部模型、内部双离合差速器,其中内部模型又分为锁止式差速器、限滑式差速器、横摆控制差速器,以普通市差速器为例7.悬架系统悬架系统分为独立悬架、非独立悬架,独立悬架又分为简单独立悬架和复杂独立悬架,非独立悬架也分为简单非独立悬架和复杂非独立悬架。
包含K特性和C特性以复杂非独立悬架系统为例K特性C特性8.制动系统制动系统:液压制动、气压制动(货车普遍采用气压制动)9.转向系统转向系统:长型(轴距6m)、中型(轴距5m)、短型(轴距4m)10.载荷建模载荷建模:规则载荷、不规则载荷,以规则载荷为例(二)Procedure(流程)、Event(事件)Procedure(流程):包括驾驶员控制和路面定义Event(事件):满足一定条件的触发以Procedure为例驾驶员控制;(1)速度控制:(2)制动控制:(3)换挡控制:(4)转向控制;路面定义:。
参数化建模1.零件名称(PART NUMBER)XXX-XXXXX-X00-000-REINF- ROOFSIDE GRAB-ZSLS-20110705分别是:车型代号、零件的序号、版本号、英文名、设计者、日期具体格式可以不按照此例2.车身坐标系(Axis Systems)3.参数(Parameters)4.零件实体数据(Part Body)用来存放实体数据,名称可根据实际修改5.外部数据(External geometry)6.最终结果(Final part)A:独立零件B:左右完全对称或局部不对称的左右零件,须注明7.零件设计过程(Part Definition)8.关键截面(Section)开孔方式,易修改的钣金开孔。
注意事项:1,Main part >>>> reference structure >>>> reference point与ENG_TOOL_DERECTION >>>> reference point 关联相合,这样之后的参数化不依赖于插件,连接有序且紧密2,模板草图XZ方向是否正确,3,各草图内部,虚线符号不要被激活,否则后期工作量增加。
4,注意隐藏的部位,这样的方式做参数化的时候退出草图就不会“乱了”,进入草图也是“有路可循”的。
5,不依赖于插件的快速逆向参数化方法——三点确定平面。
reference point前的部分可以删掉,OK。
不懂并不表示不存在。
6,这样的结局。
1+2=?+3=?+4=?……=结果7,点云上点数不够多不均匀怎么办,(征对零件导出的点云)Mesh smoothing点云有破洞用mesh cleaner。
Trucksim整车建模(一)车辆模型1.车身建模2.空气动力学建模3.动画4.轮胎建模轮胎模型分为:TNO Delft-Type model 、COSIN FTire model、软件自带、以自带模型为例5.转向盘力矩转向盘力矩和主销力矩之间的关系曲线默认值1/20、1/256.动力总成驱动形式:前驱、后驱、四驱、速度控制,其中速度控制通过PID控制来调节车速,没有传动系统,无法做动力性、经济性的仿真,但可以做例如操纵稳定性的仿真。
发动机:外部模型(例如Simulink种的模型)、内置模型离合器:内部液力变矩器、外部液力耦合器、内置离合器变速器:内部模型、外部模型差速器:外部模型、内部模型、内部双离合差速器,其中内部模型又分为锁止式差速器、限滑式差速器、横摆控制差速器,以普通市差速器为例7.悬架系统悬架系统分为独立悬架、非独立悬架,独立悬架又分为简单独立悬架和复杂独立悬架,非独立悬架也分为简单非独立悬架和复杂非独立悬架。
包含K特性和C特性以复杂非独立悬架系统为例K特性C特性8.制动系统制动系统:液压制动、气压制动(货车普遍采用气压制动)9.转向系统转向系统:长型(轴距6m)、中型(轴距5m)、短型(轴距4m)10.载荷建模载荷建模:规则载荷、不规则载荷,以规则载荷为例(二)Procedure(流程)、Event(事件)Procedure(流程):包括驾驶员控制和路面定义Event(事件):满足一定条件的触发以Procedure为例驾驶员控制;(1)速度控制:(2)制动控制:(3)换挡控制:(4)转向控制;路面定义:。
carsim对开路面附着系数设置开路面附着系数是指车辆与路面之间的摩擦力,它直接影响着车辆的操控、制动和加速性能。
在车辆动力学仿真软件中,合理设置开路面附着系数是非常重要的,可以确保仿真结果更加准确可靠。
本文将介绍如何在Carsim中设置开路面附着系数,以帮助汽车工程师们更好地进行车辆动力学仿真分析。
1. 参数介绍在Carsim中,可以通过Road-Tire Parameters(道路-轮胎参数)来设置开路面附着系数。
这一参数包括两部分:前向附着系数(Longitudinal coefficient of friction)和横向附着系数(Lateral coefficient of friction)。
前向附着系数是指车辆在加速和制动过程中与路面之间的摩擦力,而横向附着系数是指车辆在转向过程中与路面之间的摩擦力。
2. 设置方法在Carsim中,可以通过修改道路-轮胎模型的参数来设置开路面附着系数。
具体步骤如下:(1)打开Carsim软件,并加载车辆模型。
(2)在左侧工具栏的"Properties"(属性)选项中,选择"Road/Tire"(道路/轮胎)。
(3)在"Road/Tire"选项卡中,找到"Road Coefficients"(道路系数)参数,并点击右侧的三角形图标展开。
(4)在"Road Coefficients"选项中,可以设置前后轮胎和左右轮胎的前向和横向附着系数。
根据实际需求,可以设置不同的数值。
(5)设置完成后,点击"Apply"(应用)按钮保存修改。
3. 参数选取在实际工程应用中,选取合适的开路面附着系数是非常重要的。
一般来说,开路面附着系数应根据所行驶路面的实际情况来确定。
常见的路面类型包括干燥柏油路面、湿滑路面、雪地路面等,它们的附着系数迥然不同。
在选择附着系数时,可以参考现有的研究数据或者进行实地测试以获取准确的数值。
车体空载情况下的车体信息(1 )簧上质量的质心距前轴的距离mm(2 )簧上质量质心距地面的高度mm(3 ) 轴距mm(4 ) 质心的横向偏移量mm(5 )簧载质量kg(6 )对x 轴的极惯性矩( lxx ) kg-m2(7)对y 轴的极惯性矩( lyy ) kg-m2(8 )对z 轴的极惯性矩( lzz ) kg-m2(9) 对x、y 轴的惯性积( lxy )kg-m2(10) 对x、z 轴的惯性积( lxz )kg-m2(11) 对y、z 轴的惯性积( lyz )kg-m2二空气动力学(1) 空气动力学参考点X mm(2) 空气动力学参考点Y mm(3) 空气动力学参考点Z mm (4 ) 迎风面积m2(5 )空气动力学参考长度mm(6 )空气密度kg/m3(7 )CFx(空气动力学系数)与slip angle ( 行车速度方向与空气流动方向的夹角) 的关系(8) CFy 与slip angle的关系(9) CFz 与slip angle的关系(10) CMx与slipangle的关系(11) CMy与slipangle的关系(12) CMz与slipangle的关系三传动系1 最简单的一种(1) 后轮驱动所占的比值,为1时,后轮驱动;为0 时,前轮驱动(2 )发动机的功率KW2 前轮驱动或后轮驱动1)发动机特性(1 )各个节气门位置下,发动机扭矩(N-m)与发动机转速 (rpm) 的关系(2 )打开节气门的时间迟滞sec(3 ) 关闭节气门的时间迟滞sec(4 ) 曲轴的旋转惯量kg-m2(5 ) 怠速时发动机的转速rpm2)离合器特性a 液力变矩器(1) 扭矩比(输出比输入)与速度比(输出比输入)的关系(2)液力变矩器的参数1/K 与速度比(输出比输入)的关系(3)输入轴的转动惯量kg-m2(4)输出轴的转动惯量kg-m2b 机械式离合器(1 )输出的最大扭矩(N-m)与离合器接合程度 (0代表完全结合,1 代表完全分离)的关系(2 )接合时间迟滞sec(3 )分离时间迟滞sec(4 )输入轴的转动惯量kg-m2(5 )输出轴的转动惯量kg-m2 3)变速器(1 )正向挡位和倒挡的传动比,转动惯量(kg-m2),正向传动与反向传动效率(2 )中间挡的转动惯量( kg-m2)(3 ) 换挡时间sec(4 )各个挡位中低速齿轮的输出转速rpm)与节气门开口位置的关系4)差速器(1 )左右车轮扭矩差( N-m)与车轮速度差( rpm)的关系(2 )抗扭刚度N-m/deg(3 ) 抗扭阻尼N-m-s/deg(4 )传动比(5 )正反向的传动效率(6 )驱动轴的惯性量kg-m2(7 )半轴到左侧车轮的惯性量kg-m2(8 )半轴到右侧车轮的惯性量kg-m2还包括传动系(不包括发动机)的自然频率( Hz)与阻尼率3 四轮驱动与前轮驱动相比,增加分动箱,其中包括:(1 )前后轴的扭矩差( N-m)与前后轮的转速差( rpm)的关系(2 )分配到后轮上的扭矩( 百分比形式)(3 )传动比(4 )扭杆刚度N-m/deg(5 ) 扭杆阻尼N-m-s/deg还包括传动系的正效率与逆效率四制动系统1 简单制动系统(1)制动力矩(N-m)与车轮汽缸压力(MPa)的关系, 分左前轮,右前轮,左后轮,右后轮, 为一比例常数或一条变化曲线(2) 比例阀之后的管路压力(MPa)与其输入压力(MPa)的关系, 分左前轮,右前轮, 左后轮,右后轮, 通常为一比例常数(3) 流体动力学时间常数, 包括左前,右前,左后,右后,单位为sec(4) 流体迟滞, 包括左前,右前,左后,右后,单位为sec(5 )前后车轮ABS工作的滑移率区间(6 )ABS工作截止的最低速度km/h(7) 经ABS控制后输出的压力MPa2 考虑助力与热衰退的制动系统(1 )比例阀输出压力( Mpa)与比例阀输入压力( Mpa)的关系,包括左前,左后,右前,右后(2 )制动盘质量kg(3) 在0摄氏度时制动盘的比热kJ/kg/C(4 )单位温度升高比热的变化量kJ/kg/C2(5) 制动钳压力( MPa)与制动钳体积( mm)3 的关系(6 )制动钳气缸中单位流量所产生的压力MPa/(mm3/s)(7)冷却系数(1/s) 与车辆速度( km/h)的关系(8) 不同制动盘温度(C)下,制动力矩(N-m)与制动轮缸压力 (Mpa)的关系(9) 控制策略( A型为调节主缸后的压力值;B型为调节比例阀后的管路压力;也可不控制)(10 ) 四个车轮的制动盘初始温度( C)(11 ) 空气温度( C)(12 ) 助力后输出的力( N)与助力前输入的力( N)的关系,助力后输出的力为主缸压力(13 ) 踏板的杠杆比(14 ) 主缸直径mm(15 ) 启动助力的时间迟滞sec (16 ) 关闭助力的时间迟滞sec五转向系统1) 转向柱管系统:(1 )转向柱管的惯性kg-m2 (2 )转向系统的惯量kg-m2(3 ) 转向柱管阻尼Nm-s/deg(4 ) 转向柱管干摩擦N-m(5 )转向盘自由角行程deg2) 主销的几何特性:(1 )汽车前进方向投影,主销轴线与半轴轴线的交点距车轮中心的距离mm,包括四个车轮(2 )主销内倾角deg(3 )主销后倾角deg(4) 水平路面行驶,汽车侧面投影中,车轮质心所驶过的直线与主销轴线的交点距车轮中心的距离mm3) 前轮转向方式包括非助力齿条齿轮式和循环球式,助力齿条齿轮式和循环球式助力齿条齿轮式(1)齿条的行程(mm)与齿轮转角(deg) 的关系(2 )左右转向轮转角(deg) 与齿条的行程(mm)的关系(3)因转向系统柔性所引起的转向角(deg) 随主销力矩(N-m)的关系,主销力矩为左右主销力矩之和。
(4 ) 前轮转向阻尼N-s/mm(5) 不同载荷下,驻车时转向阻力矩( N-m)随速度(km/h) 的关系(6 ) 转向时,左右主销滞后方向盘的参考角deg(7)在某一车速下( kph),系统助力( N)与扭杆力矩( N-m)的关系(8 )助力迟滞sec(9 )扭杆刚度N-m/deg非助力齿条齿轮式没有以上7,8, 9 选项助力循环球式(1 )转向垂臂的转角( deg)与齿轮箱输入角度( deg)的关系(2 )左右车轮转角( deg)与转向垂臂角度( deg)的关系(3 ) 前轮转向阻尼N-s/mm(4) 因转向系统柔性所引起的转向角( deg)随主销力矩( N-m)的变化关系,主销力矩为左右主销力矩之和。
(5) 不同载荷下,驻车转向的阻力矩( N-m)随速度(km/h) 的关系(6 ) 转向时,左右主销滞后方向盘的参考角deg(7)辅助力矩( N-m)与扭杆力矩( N-m)的关系(8 )助力迟滞sec(9 )扭杆刚度Nm/deg非助力循环球式没有以上7,8, 9 选项六K 特性1 独立悬架后轴与之对应(1 )非簧载质量kg(2 ) 左右车轮的转动惯量kg-m2(3 ) 轮距mm(4 )轮心距地面的高度(静载半径) mm(5 )悬架中心相对于侧倾中心的横向位移mm(6 )前左右车轮的外倾角与前束角deg(7 )左右车轮后倾角(deg) 随车轮轮心跳动量(mm)的变化关系, 后倾角向前倾为正(8 ) 左右车轮轮心在x 方向上的位移(mm)与轮跳(mm)的关系(9) 左右车轮外倾角(deg) 与轮跳(mm)的变化关系, 外倾为正(10) 左右车轮侧向位移(mm)与轮跳(mm)的变化关系, 侧向位移向内为正(11) 左右车轮前束角(deg) 与轮跳(mm)的变化关系, 前束角向内为2 非独立悬架后轴与之对应(1 ) 轮距mm(2 )静载半径mm(3 )前轴质心的高度mm(4 )悬架中心相对于侧倾中心的横向位移mm(5 )侧倾转向系数deg/deg ,即相对车轴的侧倾角与车轴转向角的关系(6 )非簧载质量kg(7 ) 前轴的侧倾转动惯量kg-m2(8 )前左、右车轮的转动惯量kg-m2(9 )后倾角(deg) 随车轮轮心跳动量(mm)的关系(10) 轮心在x方向上的位移(mm)与轮跳(mm)的关系(11) 侧向位移(mm)与轮跳(mm)的关系(12) 侧向位移(mm)与侧倾角(deg) 的关系(13) 前左右车轮的外倾角(deg)与前束角(deg)的关系3 扭转梁式(1 ) 簧上质量与左右车轮质量之和kg(2 ) 左右轮的转动惯量kg-m2(3 ) 轮距mm(4 ) 侧倾中心距地面距离mm(5 ) 车轮中心高度mm(6 ) 侧倾转向系数deg/deg(7 ) 左右车轮的外倾角deg(8 ) 左右车轮的前束角deg(9) 左右车轮后倾角(deg) 随车轮轮心跳动量(mm)的关系(10) 左右车轮轮心在x 方向上的位移(mm)与轮跳(mm)的关系七C 特性1 独立悬架后轴与之对应(1 )左右弹簧刚度N/mm,分为加载和卸载两种工况(2 )横向稳定杆的刚度N-m/deg,即辅助力矩(不加横向稳定杆的侧倾力矩(N-m)与加横向稳定杆的侧倾力矩(N-m) 之差)随侧倾角(deg) 的变化关系(3)除横拉杆外其它部件的辅助侧倾力矩N-m sec/deg(4 )左右弹簧的初始压力N(5 )左右车轮,单位轮跳引起的弹簧垂直高度的变化量(6) 左右车轮,单位轮跳引起的减震器垂直高度的变化量(7 )左右车轮,单位轮跳引起的上限位块垂直高度的变化量(8 )左右车轮,单位轮跳引起的下限位块垂直高度的变化量(9 )上限位块力( N)与其压缩位移( mm)的关系(10 ) 下限位块力( N)与压缩位移( mm)的关系(11 ) 左右减震器特性,即力(N) 随压缩速度(mm/s)的变化关系(12 ) 左右车轮单位纵向力所产生的前束角deg/N(13 ) 左右车轮单位侧向力所产生的车轮转向角deg/N(14 ) 左右车轮单位回正力矩所产生的车轮转向角deg/(N-m)(15) 左右车轮单位纵向力所产生的外倾角变化, 外倾为正deg/N(16) 左右车轮单位侧向力所产生的外倾角变化, 向右为正deg/N(17) 左右车轮单位回正力矩所产生的外倾角变化, 向右为正deg/(N-m)(18 ) 左右车轮单位纵向力所产生的纵向位移mm/N(19 ) 左右车轮单位侧向力所产生的侧向位移mm/N2 非独立悬架参数与独立悬架基本相同,后轴与之对应(1 )左右弹簧刚度N/mm,分为加载和卸载两种工况(2 )横向稳定杆的刚度N-m/deg,即辅助力矩(不加横向稳定杆的侧倾力矩(N-m)与加横向稳定杆的侧倾力矩(N-m) 之差)随侧倾角(deg) 的变化关系(3)除横拉杆外其它部件的辅助侧倾力矩N-m sec/deg(4 )左右弹簧的初始压力N(5 )左右车轮,单位轮跳引起的弹簧垂直高度的变化量(6)左右车轮,单位轮跳引起的减震器垂直高度的变化量(7 )左右车轮,单位轮跳引起的上限位块垂直高度的变化量(8 )左右车轮,单位轮跳引起的下限位块垂直高度的变化量(9 )上限位块力( N)与其压缩位移( mm)的关系(10 ) 下限位块力( N)与压缩位移( mm)的关系(11 ) 左右减震器特性,即力(N) 随压缩速度(mm/s)的变化关系(12 ) 左右车轮单位纵向力所产生的前束角deg/N(13 ) 左右车轮单位侧向力所产生的车轮转向角deg/N(14 ) 左右车轮单位回正力矩所产生的车轮转向角deg/(N-m)(15) 左右车轮单位纵向力所产生的外倾角变化, 外倾为正deg/N(16) 左右车轮单位侧向力所产生的外倾角变化, 向右为正deg/N(17) 左右车轮单位回正力矩所产生的外倾角变化, 向右为正deg/(N-m)(18 ) 左右车轮单位纵向力所产生的纵向位移mm/N(19 ) 左右车轮单位侧向力所产生的侧向位移mm/N(20 ) 左右车轮单位纵向力所产生的车轴纵向位移mm/N(21 ) 左右车轮单位侧向力所产生的车轴侧向位移mm/N(22 ) 左右弹簧之间的距离mm(23 ) 减震器之间的距离mm(24 ) 上限位块之间的距离mm (25 ) 下限位块之间的距离mm3 扭转梁式参数与前轴独立悬架的 C 特性相同。