数学分析17-3173 方向导数与梯度
- 格式:pdf
- 大小:243.26 KB
- 文档页数:14
导数:()()()00'000lim limx x f x x f x yfx x x∆→∆→+∆-∆==∆∆,导数意义为函数变化率。
由定义可知,导数是对应一元函数。
偏导数:()()()0000000,,,limx x f x x y f x y f x y x∆→+∆-=∆()()()0000000,,,limy y f x y y f x y f x y y∆→+∆-=∆.偏导数是对应于多元函数。
其意义是:偏导数反应是函数沿坐标轴方向变化率。
方向导数:设l 为xOy平面上以()000,P x y 为始发点一条射线,()cos ,cos l αβ=e 是与l 同方向单位向量。
则该射线参数方程为:00cos cos x x t y y t αβ=+=+,那么,函数(,)f x y ,在()000,P x y 沿l 方向方向导数为:()()()0000000,cos ,y cos ,lim t x y f x t t f x y f ltαβ+→++-∂=∂。
从方向导数定义可知,方向导数()00,x y f l∂∂就是函数(,)f x y 在点()000,P x y 沿方向l 变化率。
方向导数也是对应于多元函数。
方向导数是一个标量值。
方向导数与偏导数关系:如果函数(,)f x y 在点()000,P x y 可微分,那么函数在改点沿任意方向l方向导数存在,且有()()()000000,,cos ,cos x y x y f f x y f x y lαβ∂=+∂,其中()cos ,cos l e αβ=为方向l 方向余弦。
(若方向()1,0l =e 也就是x 轴方向,则()0000,(,)x x y ff x y l∂=∂,若方向()0,1l =e 也就是y 轴方向,则()0000,(,)y x y f f x y l∂=∂).梯度:设函数(,)f x y 在平面区域D 内有一阶连续偏导数,则对于每一个点()000,P x y D ∈都可以定出一个向量()()0000,,x y f x y f x y +i j ,这向量称为函数(,)f x y 在点()000,P x y 梯度,即()()()000000 ,,,x y f x y f x y f x y =+grad i j 。
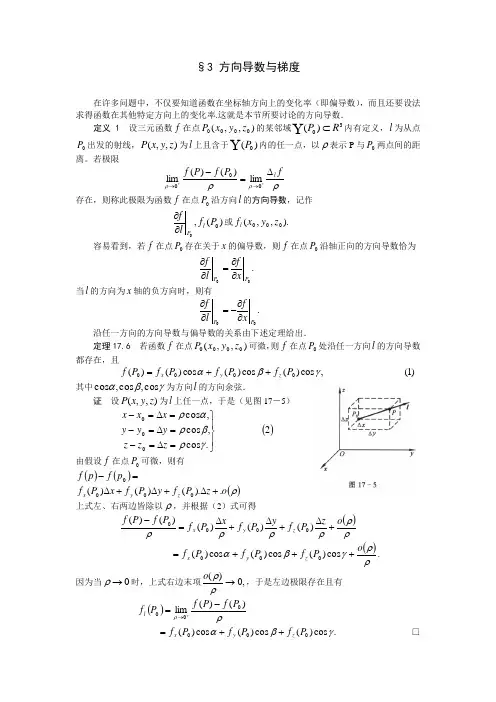
§3 方向导数与梯度在许多问题中,不仅要知道函数在坐标轴方向上的变化率(即偏导数),而且还要设法求得函数在其他特定方向上的变化率.这就是本节所要讨论的方向导数. 定义1 设三元函数f 在点),,(0000z y x P 的某邻域30)(R P ⊂ 内有定义,l 为从点0P 出发的射线,),,(z y x P 为l 上且含于 )(0P 内的任一点,以ρ表示P 与0P 两点间的距离。
若极限ρρρρf P f P f l ∆=-++→→000lim )()(lim存在,则称此极限为函数f 在点0P 沿方向l 的方向导数,记作)(,00P f l f l P ∂∂或).,,(000z y x f l 容易看到,若f 在点0P 存在关于x 的偏导数,则f 在点0P 沿轴正向的方向导数恰为 .00P P x f lf∂∂=∂∂ 当l 的方向为x 轴的负方向时,则有 .00P P x f l f∂∂-=∂∂ 沿任一方向的方向导数与偏导数的关系由下述定理给出.定理17.6 若函数f 在点),,(0000z y x P 可微,则f 在点0P 处沿任一方向l 的方向导数都存在,且,cos )(cos )(cos )()(0000γβαP f P f P f P f z y x ++= )1( 其中γβαcos ,cos ,cos 为方向l 的方向余弦.证 设),,(z y x P 为l 上任一点,于是(见图17-5)⎪⎭⎪⎬⎫=∆=-=∆=-=∆=-.cos ,cos ,cos 000γρβραρz z z y y y x x x ()2由假设f 在点0P 可微,则有 ()()=-0p f p f ()ρo z P f y P f x P f z y x .).()()(000+∆+∆+∆上式左、右两边皆除以ρ,并根据(2)式可得()ρρρρρρo z P f y P f x P f P f P f z y x +∆+∆+∆=-)()()()()(0000 ()ρργβαo P f P f P f z y x +++=cos )(cos )(cos )(000. 因为当0→ρ时,上式右边末项,0)(→ρρo ,于是左边极限存在且有()ρρ)()(lim 000P f P f P f l -=+→ .cos )(cos )(cos )(000γβαP f P f P f z y x ++= □对于二元函数),(y x f 来说,相应于)1(的结果是 (),cos ),(cos ),(00000βαy x f y x f P f y x l += 其中βα,是平面向量l 的方向角.例1 设,),,(32z y x z y x f ++=求f 在点0P )1,1,1(沿方向)1,2,2(:-l 的方向导数. 解 易见f 在点0P 可微.故由3)(,2)(,1)(000===P f P f P f z y x 及方向l 的方向余弦,321)2(22cos ,321)2(22cos 222222-=+-+-==+-+=βα grad ),3,3,1()(0--=P f g ra d .19)3()3(1222=-+-+=f □作业布置:P127 1;3.。
方向导数与梯度的关系方向导数和梯度是微积分中非常重要的概念,它们在多元函数中描述了函数在某一点的变化率和方向。
方向导数是指函数在某一点沿着某一给定方向上的变化率,而梯度则是函数在某一点上的方向导数取得最大值的方向。
本文将从理论和实际应用两个方面介绍方向导数与梯度的关系。
我们来看方向导数的定义。
对于函数f(x, y)在点P(x0, y0)处,沿着单位向量u=(a, b)的方向,其方向导数定义为:Duf(x0, y0) = lim(h->0) [f(x0+ah, y0+bh) - f(x0, y0)]/h其中lim表示极限,h表示一个接近于0的数。
方向导数Duf(x0, y0)表示函数f(x, y)在点P(x0, y0)沿着方向u的变化率。
接下来,我们来看梯度的定义。
对于函数f(x, y)在点P(x0, y0)处,梯度定义为:∇f(x0, y0) = (∂f/∂x, ∂f/∂y)其中∂f/∂x和∂f/∂y分别表示函数f(x, y)对x和y的偏导数。
梯度∇f(x0, y0)是一个向量,它的方向指向函数在点P(x0, y0)处变化最快的方向,其模表示函数在该点的最大变化率。
那么,方向导数与梯度之间有什么关系呢?我们可以发现,当方向向量u与梯度向量∇f(x0, y0)的方向相同时,方向导数Duf(x0, y0)取得最大值。
换句话说,梯度的方向就是函数在某一点上方向导数取得最大值的方向。
为了更好地理解这一关系,我们可以通过一个简单的例子来说明。
假设有一个二元函数f(x, y) = x^2 + y^2,我们要求在点P(1, 1)处沿着方向u=(1, 1)的方向导数。
我们计算函数在点P(1, 1)处的梯度。
根据梯度的定义,我们有:∇f(1, 1) = (∂f/∂x, ∂f/∂y) = (2x, 2y) = (2, 2)接下来,我们计算方向向量u=(1, 1)与梯度向量∇f(1, 1)的点积。
根据点积的定义,我们有:u·∇f(1, 1) = (1, 1)·(2, 2) = 1*2 + 1*2 = 4因此,方向导数Duf(1, 1)的最大值为4。
方向导数与梯度的关系与计算公式方向导数(Directional Derivative)是多元函数在某个给定点上沿指定方向的变化率。
它在物理学、工程学和优化问题中具有重要的应用。
在求解方向导数时,我们常常会遇到梯度(Gradient)的概念。
本文将介绍方向导数与梯度之间的关系,并探讨它们的计算公式。
一、方向导数的定义在多元函数中,给定一个点P(x₀, y₀, z₀)及一个单位向量u = (a, b, c),其中a² + b² + c² = 1,方向导数Duf(x₀, y₀, z₀)表示函数f(x, y, z)在P点上沿u方向的变化率。
方向导数用符号∇f(x₀, y₀, z₀)·u表示。
二、梯度的定义梯度是一个向量,它在多元函数的每个点上都有定义。
对于二元函数f(x, y),梯度∇f(x, y)表示函数f在每个点上的变化率最大的方向。
梯度可以用向量形式表示为∇f(x, y) = (fx, fy),其中fx和fy分别表示f对x和y的偏导数。
对于三元函数f(x, y, z),梯度∇f(x, y, z)表示函数f在每个点上的变化率最大的方向。
梯度可以用向量形式表示为∇f(x, y, z) = (fx, fy, fz),其中fx、fy和fz分别表示f对x、y和z的偏导数。
三、方向导数与梯度的关系在函数f(x, y, z)的某一点P(x₀, y₀, z₀)处,方向导数和梯度的关系可以表示为:Duf(x₀, y₀, z₀) = ∇f(x₀, y₀, z₀)·u即,方向导数等于梯度与单位向量u的内积。
四、方向导数的计算公式在笛卡尔坐标系中,给定一个点P(x₀, y₀, z₀)及一个非零向量u = (a, b, c),其中a² + b² + c² = 1,方向导数可以通过以下公式计算:Duf(x₀, y₀, z₀) = fx(x₀, y₀, z₀)a + fy(x₀, y₀, z₀)b + fz(x₀, y₀, z₀)c其中fx、fy和fz分别表示f对x、y和z的偏导数。
第十七章 多元函数微分学3方向导数与梯度定义1:设三元函数f 在点P 0(x 0,y 0,z 0)的某邻域U(P 0)⊂R 3有定义,l 为从点P 0出发的射线,P(x,y,z)为l 上且含于U(P 0)内的任一点,以ρ表示P 与P 0两点间的距离. 若极限ρ)f(P -f(P)lim00ρ+→=ρflim 0ρl ∆+→存在,则称此极限为函数f 在点P 0沿方向l 的方向导数,记作0P lz ∂∂,f l (P 0)或f l (x 0,y 0,z 0).若f 在点P 0存在关于x 的偏导数,则f 在P 0沿x 轴正向的方向导数为:P lz ∂∂=P xz ∂∂;当l 的方向为x 轴的负方向时,则有P lz ∂∂=-P xz ∂∂.定理17.6:若函数f 在点P 0(x 0,y 0,z 0)可微,则f 在点P 0沿任一方向l 的方向导数都存在,且f l (P 0)=f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ,其中 cos α,cos β,cos γ是方向l 的方向余弦.证:设P(x,y,z)为l 上任一点,于是有⎪⎩⎪⎨⎧=∆==∆==∆=ρcosγz z -z ρcosβy y -y ρcosαx x -x 000,∵f 在点P 0可微,∴f(P)-f(P 0)=f x (P 0)△x +f y (P 0)△y +f z (P 0)△z+o (ρ), 两边除以= f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ+ρ)ρ(o ,∴f l (P 0)=ρ)f(P -f(P)lim 00ρ+→=f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ.注:二元函数f(x,y)对应的结果是:f l (P 0)=f x (x 0,y 0)cos α+f y (x 0,y 0)cos β, 其中α,β是平面向量l 的方向角.例1:设f(x,y,z)=x+y 2+z 3,求f 在点P 0(1,1,1)沿方向l:(2,-2,1)的方向导数. 解:∵f x (P 0)=1; f y (P 0)=2y|(1,1,1)=2; f z (P 0)=3z 2|(1,1,1)=3; 又cos α=2221)2(22+-+=32; cos β=-32; cos γ=31;∴f l (P 0)=f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ=32-34+1=31.例2:讨论f(x,y)=⎩⎨⎧+∞<<∞<<其余部分时当,,0x -,x y 012在原点处的方向导数.解:f 在原点不连续,所有不可微. 但在始于原点的任何射线上, 都存在包含原点的充分小的一段,在这一段上,f 的函数值恒为0. 根据方向导数的定义,在原点处沿任何方向l 都有)(0,0lf∂∂=0.注:例2说明:(1)函数在一点可微是方向导数存在的充分条件,不是必要条件; (2)函数在一点连续既不是方向导数存在的必要条件也不是充分条件.定义2:若f(x,y,z)在点P 0(x 0,y 0,z 0)存在对所有自变量的偏导数,则称向量(f x (P 0),f y (P 0),f z (P 0))为函数f 在点P 0的梯度,记作:gradf=(f x (P 0),f y (P 0),f z (P 0)). 向量gradf 的长度(或模)为:|gradf|=)P (f )P (f )P (f 02z 02y 02x ++. 若记l 方向上的单位向量为:l 0=(cos α,cos β,cos γ),则方向导数公式可写成:f l (P 0)=gradf(P 0)·l 0=|gradf(P 0)|cos θ,这里θ是梯度向量gradf(P 0)与l 0的夹角. 因此当θ=0时, f l (P 0)取得最大值|gradf(P 0)|,即当f 在点P 0可微时, f 在点P 0的梯度方向是f 的值增长最快的方向,且 沿这一方面的变化率就是梯度的模;而当l 与梯度向量反方向(θ=π)时,方向导数取得最小值-|gradf(P 0)|.例3:设f(x,y,z)=xy 2+yz 3, 求f 在P 0(2,-1,1)的梯度及它的模.解:由f x (P 0)=y 2|(2,-1,1)=1; f y (P 0)=2xy+z 3|(2,-1,1)=-3; f z (P 0)=3yz 2|(2,-1,1)=-3得, f 在P 0的梯度gradf=(1,-3,-3),模为:222)3()3(1-+-+=19.习题1、求函数u=xy 2+z 3-xyz 在点(1,1,2)沿方向l(方向角分别为60⁰,45⁰,60⁰)的方向导数.解:∵u x (1,1,2)=y 2-yz|(1,1,2)=-1; u y (1,1,2)=2xy-xz|(1,1,2)=0; u z (1,1,2)=3z 2-xy|(1,1,2)=11; cos60⁰=21; cos45⁰=22; ∴f l (1,1,2)=(-1)×21+0+11×21=5.2、求函数u=xyz 在点A(5,1,2)沿到点B(9,4,14)的方向AB 上的方向导数. 解:∵u x (5,1,2)=yz|(5,1,2)=2; u y (5,1,2)=xz|(5,1,2)=10; u z (5,1,2)=xy|(5,1,2)=5; cos α=222)214()14()59(59-+-+--=134; cos β=133; cos γ=1312; ∴f l (5,1,2)=2×134+10×133+5×1312=1398.3、求函数u=x 2+2y 2+3z 2+xy-4x+2y-4z 在A(0,0,0)及B(5,-3,32)的梯度以及它们的模.解:∵u x (0,0,0)=2x+y-4|(0,0,0)=-4; u x (5,-3,32)=2x+y-4|(5,-3,2/3)=3; u y (0,0,0)=4y+x+2|(0,0,0)=2; u y (5,-3,32)=4y+x+2|(5,-3,2/3)=-5; u z (0,0,0)=6z-4|(0,0,0)=-4; u z (5,-3,32)=6z-4|(5,-3,2/3)=0;∴gradu(0,0,0)=(-4,2,-4),|gradu(0,0,0)|=222)4(2)4(-++-=6; gradu(5,-3,32)=(3,-5,0),|gradu(5,-3,32)|=2220)5(3+-+=34.4、设函数u=ln ⎪⎭⎫ ⎝⎛r 1, 其中r=222)c z ()b y ()a -(x -+-+, 求u 的梯度,并指出在空间哪些点上等式|gradu|=1成立. 解:u x =x r dr du ∂∂=-r a -x r 1=2r x -a ; u y =y r dr du ∂∂=2ry -b ; u z =z r dr du ∂∂=2r z -c ;∴gradu=(2r x -a ,2r y -b ,2rz-c ). 当|gradu|=1时,由 222222r z -c r y -b r x -a ⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=4222r z)-(c y)-(b x)-(a ++=42r r =r 1=1,知 222)c z ()b y ()a -(x -+-+=1,即空间以(a,b,c)为球心,以1为半径的球面上的所有点,都有|gradu|=1.5、设函数u=22c z -22ax -22b y ,求它在点(a,b,c)的梯度.解:∵u x (a,b,c)=-2a 2x |(a,b,c)=-a 2; u y (a,b,c)=-2b 2y |(a,b,c)= -b 2; u z (a,b,c)=2c2z|(a,b,c)=c 2; ∴gradu(a,bc)=(-a 2,-b 2,c 2).6、证明:(1)grad(u+c)=gradu,(c 为常数); (2)grad(αu+βv)=αgradu+βgradv ; (3)grad(uv)=ugradv+vgradu ; (4)gradf(u)=f ’(u)gradu.证:设u=u(x 1,…,x n ),v=v(x 1,…,x n );则 (1)grad(u+c)=(u x1,…,u xn )=gradu.(2)grad(αu+βv)=(αu x1+βv x1,…,αu xn +βv xn )=α(u x1,…,u xn )+β(v x1,…,v xn ) = αgradu+βgradv.(3)grad(uv)=(vu x1+uv x1,…,vu xn +uv xn )=u(v x1,…,v xn )+v(u x1,…,u xn ) =ugradv+vgradu.(4)gradf(u)=(f ’(u)u x1,…,f ’(u)u xn )=f ’(u)gradu.7、设r=222z y x ++, 试求:(1)gradr; (2)grad r1.解:(1)∵r x =rx ; r y =r y ; r z =r z; ∴gradr=r1(x,y,z).(2)令u=r 1, 则u x =dr du r x =-3r x ; r y =-3r y ; r z =-3rz ; ∴grad r 1=-3r 1(x,y,z).8、设u=x 2+y 2+z 2-3xyz, 试问在怎样的点集上gradu 分别满足: (1)垂直于x 轴;(3)平行于x 轴;(3)恒为零向量.解:∵u x =2x-3yz; u y =2y-3xz; u z =2z-3xy; ∵gradu=(2x-3yz,2y-3xz,2z-3xy). (1)当gradu 垂直于x 轴时,∵x 轴的方向向量为(1,0,0), ∴(2x-3yz,2y-3xz,2z-3xy)(1,0,0)=2x-3yz=0,即2x=3yz.(3)当gradu 平行于z 轴时,13yz -2x =03xz -2y =03xy-2z =c(常数),即 2x-3yz=c, 2y=3xz, 2z=3xy.(3)当gradu 恒为零向量时, (2x-3yz,2y-3xz,2z-3xy)=(0,0,0),即 2x=3yz, 2y=3xz, 2z=3xy ;解得x 2=y 2=z 2=94.9、设f(x,y)可微,l 是R 2上的一个确定向量. 倘若处处有f l (x,y)=0,试问此函数f 有何特征?解:若f l (x,y)=f x cos α+f y cos β≡0,即(f x ,f y )(cos α,cos β)=0,说明 函数f 在定义域内任一点P(x,y)的梯度向量与向量l 垂直.10、设f(x,y)可微,l 1与l 2是R 2上的一组线性无关向量. 试证明:若i l f (x,y)≡0, (i=1,2),则f(x,y)≡常数.证:依题意,f l1(x,y)=f x cos α1+f y cos β1=0,f l2(x,y)=f x cos α2+f y cos β2=0, cos α1,cos β1为l 1的方向余弦; cos α2,cos β2为l 2的方向余弦; 又l 1与l 2性线无关,即2121βcos βcos αcos αcos ,,≠0,∴f x =f y =0,∴f(x,y)≡常数.。
第十七章 多元函数微分学3方向导数与梯度定义1:设三元函数f 在点P 0(x 0,y 0,z 0)的某邻域U(P 0)⊂R 3有定义,l 为从点P 0出发的射线,P(x,y,z)为l 上且含于U(P 0)内的任一点,以ρ表示P 与P 0两点间的距离. 若极限ρ)f(P -f(P)lim00ρ+→=ρflim 0ρl ∆+→存在,则称此极限为函数f 在点P 0沿方向l 的方向导数,记作0P lz ∂∂,f l (P 0)或f l (x 0,y 0,z 0).若f 在点P 0存在关于x 的偏导数,则f 在P 0沿x 轴正向的方向导数为:P lz ∂∂=P xz ∂∂;当l 的方向为x 轴的负方向时,则有P lz ∂∂=-P xz ∂∂.定理17.6:若函数f 在点P 0(x 0,y 0,z 0)可微,则f 在点P 0沿任一方向l 的方向导数都存在,且f l (P 0)=f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ,其中 cos α,cos β,cos γ是方向l 的方向余弦.证:设P(x,y,z)为l 上任一点,于是有⎪⎩⎪⎨⎧=∆==∆==∆=ρcosγz z -z ρcosβy y -y ρcosαx x -x 000,∵f 在点P 0可微,∴f(P)-f(P 0)=f x (P 0)△x +f y (P 0)△y +f z (P 0)△z+o (ρ), 两边除以= f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ+ρ)ρ(o ,∴f l (P 0)=ρ)f(P -f(P)lim 00ρ+→=f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ.注:二元函数f(x,y)对应的结果是:f l (P 0)=f x (x 0,y 0)cos α+f y (x 0,y 0)cos β, 其中α,β是平面向量l 的方向角.例1:设f(x,y,z)=x+y 2+z 3,求f 在点P 0(1,1,1)沿方向l:(2,-2,1)的方向导数. 解:∵f x (P 0)=1; f y (P 0)=2y|(1,1,1)=2; f z (P 0)=3z 2|(1,1,1)=3; 又cos α=2221)2(22+-+=32; cos β=-32; cos γ=31;∴f l (P 0)=f x (P 0)cos α+f y (P 0)cos β+f z (P 0)cos γ=32-34+1=31.例2:讨论f(x,y)=⎩⎨⎧+∞<<∞<<其余部分时当,,0x -,x y 012在原点处的方向导数.解:f 在原点不连续,所有不可微. 但在始于原点的任何射线上, 都存在包含原点的充分小的一段,在这一段上,f 的函数值恒为0. 根据方向导数的定义,在原点处沿任何方向l 都有)(0,0lf∂∂=0.注:例2说明:(1)函数在一点可微是方向导数存在的充分条件,不是必要条件; (2)函数在一点连续既不是方向导数存在的必要条件也不是充分条件.定义2:若f(x,y,z)在点P 0(x 0,y 0,z 0)存在对所有自变量的偏导数,则称向量(f x (P 0),f y (P 0),f z (P 0))为函数f 在点P 0的梯度,记作:gradf=(f x (P 0),f y (P 0),f z (P 0)). 向量gradf 的长度(或模)为:|gradf|=)P (f )P (f )P (f 02z 02y 02x ++. 若记l 方向上的单位向量为:l 0=(cos α,cos β,cos γ),则方向导数公式可写成:f l (P 0)=gradf(P 0)·l 0=|gradf(P 0)|cos θ,这里θ是梯度向量gradf(P 0)与l 0的夹角. 因此当θ=0时, f l (P 0)取得最大值|gradf(P 0)|,即当f 在点P 0可微时, f 在点P 0的梯度方向是f 的值增长最快的方向,且 沿这一方面的变化率就是梯度的模;而当l 与梯度向量反方向(θ=π)时,方向导数取得最小值-|gradf(P 0)|.例3:设f(x,y,z)=xy 2+yz 3, 求f 在P 0(2,-1,1)的梯度及它的模.解:由f x (P 0)=y 2|(2,-1,1)=1; f y (P 0)=2xy+z 3|(2,-1,1)=-3; f z (P 0)=3yz 2|(2,-1,1)=-3得, f 在P 0的梯度gradf=(1,-3,-3),模为:222)3()3(1-+-+=19.习题1、求函数u=xy 2+z 3-xyz 在点(1,1,2)沿方向l(方向角分别为60⁰,45⁰,60⁰)的方向导数.解:∵u x (1,1,2)=y 2-yz|(1,1,2)=-1; u y (1,1,2)=2xy-xz|(1,1,2)=0; u z (1,1,2)=3z 2-xy|(1,1,2)=11; cos60⁰=21; cos45⁰=22; ∴f l (1,1,2)=(-1)×21+0+11×21=5.2、求函数u=xyz 在点A(5,1,2)沿到点B(9,4,14)的方向AB 上的方向导数. 解:∵u x (5,1,2)=yz|(5,1,2)=2; u y (5,1,2)=xz|(5,1,2)=10; u z (5,1,2)=xy|(5,1,2)=5; cos α=222)214()14()59(59-+-+--=134; cos β=133; cos γ=1312; ∴f l (5,1,2)=2×134+10×133+5×1312=1398.3、求函数u=x 2+2y 2+3z 2+xy-4x+2y-4z 在A(0,0,0)及B(5,-3,32)的梯度以及它们的模.解:∵u x (0,0,0)=2x+y-4|(0,0,0)=-4; u x (5,-3,32)=2x+y-4|(5,-3,2/3)=3; u y (0,0,0)=4y+x+2|(0,0,0)=2; u y (5,-3,32)=4y+x+2|(5,-3,2/3)=-5; u z (0,0,0)=6z-4|(0,0,0)=-4; u z (5,-3,32)=6z-4|(5,-3,2/3)=0;∴gradu(0,0,0)=(-4,2,-4),|gradu(0,0,0)|=222)4(2)4(-++-=6; gradu(5,-3,32)=(3,-5,0),|gradu(5,-3,32)|=2220)5(3+-+=34.4、设函数u=ln ⎪⎭⎫ ⎝⎛r 1, 其中r=222)c z ()b y ()a -(x -+-+, 求u 的梯度,并指出在空间哪些点上等式|gradu|=1成立. 解:u x =x r dr du ∂∂=-r a -x r 1=2r x -a ; u y =y r dr du ∂∂=2ry -b ; u z =z r dr du ∂∂=2r z -c ;∴gradu=(2r x -a ,2r y -b ,2rz-c ). 当|gradu|=1时,由 222222r z -c r y -b r x -a ⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=4222r z)-(c y)-(b x)-(a ++=42r r =r 1=1,知 222)c z ()b y ()a -(x -+-+=1,即空间以(a,b,c)为球心,以1为半径的球面上的所有点,都有|gradu|=1.5、设函数u=22c z -22ax -22b y ,求它在点(a,b,c)的梯度.解:∵u x (a,b,c)=-2a 2x |(a,b,c)=-a 2; u y (a,b,c)=-2b 2y |(a,b,c)= -b 2; u z (a,b,c)=2c2z|(a,b,c)=c 2; ∴gradu(a,bc)=(-a 2,-b 2,c 2).6、证明:(1)grad(u+c)=gradu,(c 为常数); (2)grad(αu+βv)=αgradu+βgradv ; (3)grad(uv)=ugradv+vgradu ; (4)gradf(u)=f ’(u)gradu.证:设u=u(x 1,…,x n ),v=v(x 1,…,x n );则 (1)grad(u+c)=(u x1,…,u xn )=gradu.(2)grad(αu+βv)=(αu x1+βv x1,…,αu xn +βv xn )=α(u x1,…,u xn )+β(v x1,…,v xn ) = αgradu+βgradv.(3)grad(uv)=(vu x1+uv x1,…,vu xn +uv xn )=u(v x1,…,v xn )+v(u x1,…,u xn ) =ugradv+vgradu.(4)gradf(u)=(f ’(u)u x1,…,f ’(u)u xn )=f ’(u)gradu.7、设r=222z y x ++, 试求:(1)gradr; (2)grad r1.解:(1)∵r x =rx ; r y =r y ; r z =r z; ∴gradr=r1(x,y,z).(2)令u=r 1, 则u x =dr du r x =-3r x ; r y =-3r y ; r z =-3rz ; ∴grad r 1=-3r 1(x,y,z).8、设u=x 2+y 2+z 2-3xyz, 试问在怎样的点集上gradu 分别满足: (1)垂直于x 轴;(3)平行于x 轴;(3)恒为零向量.解:∵u x =2x-3yz; u y =2y-3xz; u z =2z-3xy; ∵gradu=(2x-3yz,2y-3xz,2z-3xy). (1)当gradu 垂直于x 轴时,∵x 轴的方向向量为(1,0,0), ∴(2x-3yz,2y-3xz,2z-3xy)(1,0,0)=2x-3yz=0,即2x=3yz.(3)当gradu 平行于z 轴时,13yz -2x =03xz -2y =03xy-2z =c(常数),即 2x-3yz=c, 2y=3xz, 2z=3xy.(3)当gradu 恒为零向量时, (2x-3yz,2y-3xz,2z-3xy)=(0,0,0),即 2x=3yz, 2y=3xz, 2z=3xy ;解得x 2=y 2=z 2=94.9、设f(x,y)可微,l 是R 2上的一个确定向量. 倘若处处有f l (x,y)=0,试问此函数f 有何特征?解:若f l (x,y)=f x cos α+f y cos β≡0,即(f x ,f y )(cos α,cos β)=0,说明 函数f 在定义域内任一点P(x,y)的梯度向量与向量l 垂直.10、设f(x,y)可微,l 1与l 2是R 2上的一组线性无关向量. 试证明:若i l f (x,y)≡0, (i=1,2),则f(x,y)≡常数.证:依题意,f l1(x,y)=f x cos α1+f y cos β1=0,f l2(x,y)=f x cos α2+f y cos β2=0, cos α1,cos β1为l 1的方向余弦; cos α2,cos β2为l 2的方向余弦; 又l 1与l 2性线无关,即2121βcos βcos αcos αcos ,,≠0,∴f x =f y =0,∴f(x,y)≡常数.。
方向导数与梯度在多变量微积分和优化理论中,方向导数和梯度是两个重要的概念。
它们提供了函数在某一点处关于不同方向的信息,以及函数在该点处的变化率和方向。
理解这两个概念对于解决各种实际问题,如最优控制、机器学习、图像处理等都至关重要。
方向导数是函数在某一点处沿特定方向的变化率。
给定一个函数f(x)在点x0,对于任意的方向v = (h1, h2,..., hn),方向导数Df(x0)v 是f(x)在x0处沿v方向的变化率。
具体地,Df(x0)v = lim(h->0) [f(x0 + hv) - f(x0)] / h。
方向导数的重要性在于它提供了函数在某一点处对不同方向的敏感度。
例如,如果你在山峰上沿着不同的方向行走,方向导数可以告诉你哪个方向更容易攀登,哪个方向更困难。
梯度是函数在某一点处所有方向导数的向量。
给定一个函数f(x)在点x0,梯度gradf(x0)是一个向量,其方向是f(x)在x0处增加最快的方向,而其大小是f(x)在该方向的导数。
具体地,gradf(x0) = (f'(x01), f'(x02),..., f'(xn))。
梯度是一个非常重要的概念,因为它提供了函数在某一点处的最大变化率方向。
在很多实际问题中,找到这个最大变化率方向往往能够指引我们找到最优解。
例如,如果你在山峰上寻找攀登最快的方式,梯度可以告诉你应该沿着哪个方向前进。
梯度是方向导数的最大值。
换句话说,对于任意给定的方向v,方向导数Df(x0)v都不超过梯度的长度。
这是因为梯度是所有方向导数向量的范数,即||gradf(x0)|| = max{Df(x0)v : ||v|| = 1}。
这个性质表明,梯度不仅提供了函数在某一点处的最大变化率方向,还给出了沿这个方向的导数(即变化率)。
这使得梯度在优化问题中具有特别的重要性,因为它可以用来找到使函数值下降最快的方向。
方向导数和梯度是多变量微积分和优化理论中的重要概念。
方向导数与梯度的关系方向导数和梯度都是用来描述函数在某一点的变化率的概念,它们之间存在一定的关系。
本文将简要介绍方向导数和梯度的概念,并探讨它们之间的关系。
一、方向导数的概念方向导数是用来描述函数在给定方向上的变化率的。
对于具有两个或更多个自变量的函数,我们可以通过改变自变量的方向来获得不同的方向导数。
在二维空间中,方向导数可以通过对函数进行偏导数计算得到。
假设函数为f(x,y),在点P(x0,y0)处,沿着单位向量u=(cosθ,sinθ)方向的方向导数定义为:Df(P;u) = lim┬(h→0)[f(x0+hu,y0+hu)-f(x0,y0)]/h其中,h表示极限中h的变化量,u为单位向量,θ为u与x轴的夹角。
二、梯度的概念梯度是用来描述函数在某一点上的最大方向导数的。
对于具有多个自变量的函数,梯度是一个向量,其大小和方向分别表示函数在该点上的变化率和变化的方向。
对于函数f(x1,x2,...,xn),在点P(x1,x2,...,xn)处,梯度定义为:∇f(P) = (∂f/∂x1,∂f/∂x2,...,∂f/∂xn)其中,∂f/∂xi表示对第i个自变量的偏导数。
三、方向导数与梯度的关系方向导数与梯度之间存在着一定的关系。
事实上,方向导数可以看作是梯度与给定方向的内积。
具体地说,对于函数f(x1,x2,...,xn),在点P(x1,x2,...,xn)处,沿着方向u=(cosθ1,cosθ2,...,cosθn)的方向导数可以用梯度与方向向量的内积表示:Df(P;u) = ∇f(P)·u = |∇f(P)||u|cosφ其中,φ为梯度与方向向量的夹角,|∇f(P)|表示梯度的模,|u|表示方向向量的模。
通过上述公式可以得出,方向导数的大小由梯度的模和方向向量的夹角共同决定。
当梯度与方向向量的夹角为0时,方向导数达到最大值;当夹角为90°时,方向导数为0;当夹角为180°时,方向导数达到最小值。
自由简述方向导数和梯度各自的定义和之间的关系一、方向导数的定义方向导数是指函数在某一点沿着特定方向的变化率,也就是函数在该点沿着某个给定方向的导数。
如果函数f(x,y)在点P(x0,y0)处可微分,那么它在该点沿着任意一个方向L的方向导数存在,并且可以通过求出L的单位向量u,然后计算出u和梯度向量∇f(x0,y0)的点积来得到。
二、梯度的定义梯度是一个向量,它表示函数在某一点上升最快的方向和速率。
如果函数f(x,y)在点P(x0,y0)处可微分,那么它在该点的梯度可以表示为∇f(x0,y0)=(fx,fy),其中fx和fy分别表示函数f对x和y的偏导数。
三、方向导数和梯度之间的关系1. 方向导数与梯度之间存在关系。
当函数在某一点处可微分时,其沿着某个给定方向L的方向导数等于该点处梯度与L所成角度余弦值乘以梯度大小。
2. 梯度是一个标量场中最大增加率所对应的矢量。
因此,在任何给定点上,沿着梯度方向移动会导致函数值增加最快。
3. 梯度的方向是函数在该点上升最快的方向。
因此,如果想要在函数中找到最大值,可以沿着梯度方向进行搜索。
4. 方向导数和梯度都可以用于优化问题。
通过计算梯度和方向导数,可以确定在某个给定点上,哪个方向会使得函数值增加或减少最快。
这对于优化问题非常有用。
5. 梯度和方向导数还可以用于解决偏微分方程。
通过计算梯度和方向导数,可以得到偏微分方程的解析解或近似解。
四、总结方向导数和梯度是微积分中重要的概念,在优化问题和偏微分方程求解中都有广泛应用。
它们之间存在密切关系,通过计算它们可以确定在某个给定点上函数值增加或减少最快的方向。