chapter5-3+Nyquist稳定性判据及稳定裕度1[1]
- 格式:ppt
- 大小:2.78 MB
- 文档页数:24


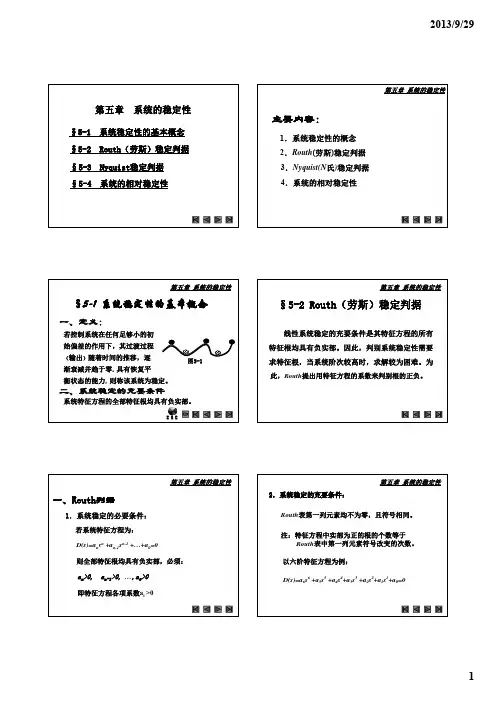
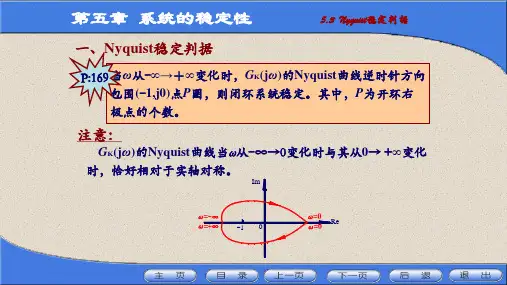
nyquist稳定判据定义
Nyquist稳定判据是一种用于确定系统稳定性的方法,它基于系统的频率响应特性。
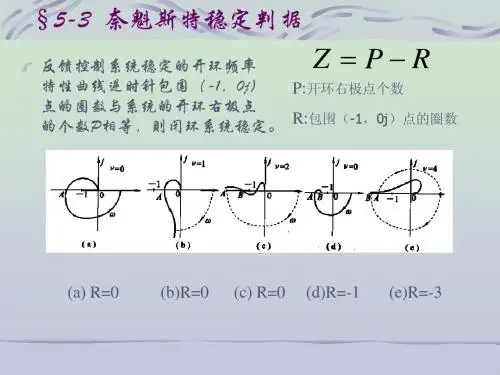
在Nyquist稳定判据中,通过将系统的传递函数表示为极坐标形式,然后绘制系统的Nyquist曲线,可以判断系统是否稳定。
具体地说,如果系统的Nyquist曲线的完整轨迹都位于单位圆内部,则系统是稳定的。
如果曲线穿过单位圆,但是穿过的次数等于系统开环传递函数的极点数减去零点数,则系统是边缘稳定的。
如果曲线穿过单位圆的次数超过系统开环传递函数的极点数减去零点数,则系统是不稳定的。
Nyquist稳定判据在控制系统设计和分析中有着广泛的应用,特别是在反馈控制系统中。
它不仅可以用于稳定性分析,还可以用于确定系统的相位余量和增益裕度等重要指标。
因此,掌握Nyquist稳定判据的定义和应用是控制工程师必备的基本技能之一。
- 1 -。