三菱机器人离线软件与示教器
- 格式:docx
- 大小:1.68 MB
- 文档页数:35


浅谈机器人离线编程软件在机器人教学中的应用作者:胡敏来源:《青年时代》2016年第21期摘要:在市场经济下,分析了离线编程软件的分类和特点,并比较了示教编程与离线编程的使用和区别,通过机器人教学,总结离线编程仿真软件在教学过程中的作用。
关键词:仿真软件;机器人;教学;一、前言目前中国焊接机器人在工厂的大量应用和快速发展需要,焊接机器人的离线编程与仿真技术是应当重视的新技术之一。
工厂希望焊接机器人既能保证工作时间,又能适应柔性化生产的需要,这种生产与编程的矛盾越来越大。
在市场经济作用下,目前机器人仿真软件分为两类:一类是通用型离线编程软件,一类是专用型离线编程软件。
通用型离线编程软件是第三方公司开发的,适用于多个品牌机器人,能够实现仿真、轨迹编程和程序输出,但兼容性不够。
常用的通用型离线编程软件有:RobotMaster、Robntnworks、Robotmove、RobotCAD、DELMIA、RobotArt、SprutCAM,RobctSim,川思特,天皇,亚龙,旭上,汇博等等。
专用型离线编程软件是机器人本厂开发或委托第三方公司开发,其特点是只能适用于其对应型号的机器人,也就是说只支持同品牌的机器人,其优点是该离线编程软件功能更强大,实用性更强,与机器人本体的兼容性也更好。
如:Robot Studio:ABB原厂的离线软件、RoboGuide:Fanuc原厂的离线软件、KUKA Sim:KUKA原厂的离线软件。
二、离线编程软件作用机器人应用中,常见的编程方式有示教编程和离线编程。
从1959年第一台机器人诞生起,最初使用的是示教编程。
示教编程是通过示教器直接控制机器人移动变换其姿态和位置,记录下移动轨迹,改变并调节速度和运动方式。
利用示教器上的操作手柄或者操作按键,我们可以很直观的看到机器人每个轴或者每个关节的运动姿态,速度。
随着自动化技术的发展,示教编程仍然是我们主要的操作方法,在长期的操作过程中,发现示教编程的精确度不高,且对于复杂的工件,编程的工作量比较大,效率低。
三菱机器人离线软件与示教器Document number:NOCG-YUNOO-BUYTT-UU986-1986UT第一节三菱机器人离线编程系统的应用工程区管理1)新建工作区(1)点击菜单栏中的[工作区]-[新建]或者(Ctrl+N)。
工作区显示如下界面。
输入工作区名、标题后,点击[OK]按钮。
(2)工程编辑画面显示后,可设定工程名、通讯设定和离线机器人的设定,然后点击[OK]按钮。
(3)工程创建完毕。
工作区中会显示工程树,走位初始值,制成的[RC1]工程。
2)打开工作区打开已经完成的工作区时,选择菜单栏中的[工作区]-[打开],或者点击工作栏中的(Ctrl+O),选择要打开的工作区后,点击[OK]按钮。
3)关闭工作区与删除工作区关闭当前编辑中的工作区时,请点击菜单栏中的[工作区]-[关闭]。
删除工作区的情况下,如果不关闭作为对象的工作区,就不能删除。
4)工作区名/工作区标题的变更在以打开工作区的基础上,鼠标右击工作区名[工作区的编辑],工作区编辑画面显示后,输入新的工作区名和标题后,点击[OK]。
如下图。
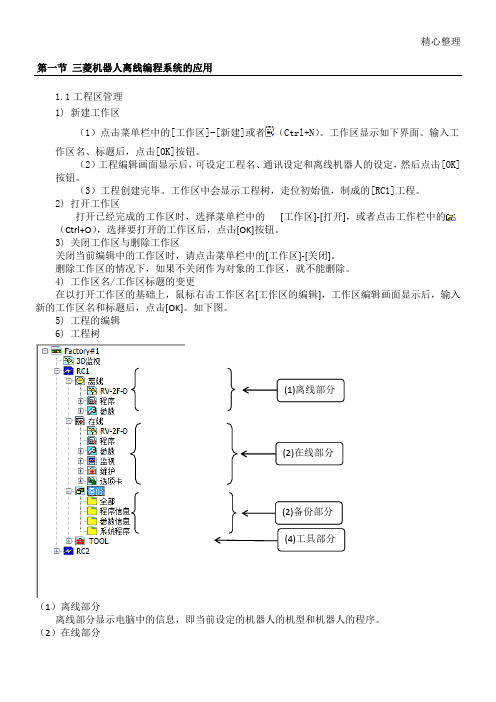
5)工程的编辑6)工程树(1)离线部分(2)在线部分(2)备份部分(4)工具部分(1)离线部分离线部分显示电脑中的信息,即当前设定的机器人的机型和机器人的程序。
(2)在线部分在和控制器连接后,切换成在线状态时,或者模拟启动时显示,显示连接中的机器人型号和控制器等相关信息。
(3)备份显示从控制器备份过来的信息。
(4)Tool功能显示其它功能。
7)离线/在线/模拟在机器人离线编程软件中,工程的状态可分为离线、在线和模拟三种。
各个状态的含义和工程树的显示内容不尽相同。
状态说明工程树的显示离线状态以电脑中保存的文件作为对象。
工程树的工程名左面显示的图标为绿色,工程树中,显示离线和备份。
在线状态连接机器人的控制器,进行控制器中信息的确认和变更。
在线时,工程树的工程名显示图表为蓝色,工程树中显示离线、在线和备份。
—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式第一节三菱机器人离线编程系统的应用1.1 工程区管理1)新建工作区(1)点击菜单栏中的[工作区]-[新建]或者(Ctrl+N)。
工作区显示如下界面。
输入工作区名、标题后,点击[OK]按钮。
(2)工程编辑画面显示后,可设定工程名、通讯设定和离线机器人的设定,然后点击[OK]按钮。
(3)工程创建完毕。
工作区中会显示工程树,走位初始值,制成的[RC1]工程。
2)打开工作区打开已经完成的工作区时,选择菜单栏中的[工作区]-[打开],或者点击工作栏中的(Ctrl+O),选择要打开的工作区后,点击[OK]按钮。
3)关闭工作区与删除工作区关闭当前编辑中的工作区时,请点击菜单栏中的[工作区]-[关闭]。
删除工作区的情况下,如果不关闭作为对象的工作区,就不能删除。
4)工作区名/工作区标题的变更在以打开工作区的基础上,鼠标右击工作区名[工作区的编辑],工作区编辑画面显示后,输入新的工作区名和标题后,点击[OK]。
如下图。
5)工程的编辑6) 工程树(1)离线部分离线部分显示电脑中的信息,即当前设定的机器人的机型和机器人的程序。
(2)在线部分在和控制器连接后,切换成在线状态时,或者模拟启动时显示,显示连接中的机器人型(1)离线部分(2)在线部分(2)备份部分 (4)工具部分号和控制器等相关信息。
(3)备份显示从控制器备份过来的信息。
(4)Tool 功能显示其它功能。
7) 离线/在线/模拟在机器人离线编程软件中,工程的状态可分为离线、在线和模拟三种。
各个状态的含义工程树的工程名左面显示的图标为绿色,工程树中,显示离进行控制器中信息的确认和变更。
在线时,工程树的工程名显示图表进行虚拟可以做以下的切换。
切换成离线模式,切换成在线模式,切换成模拟在线模式。

精心整理第一节 三菱机器人离线编程系统的应用1.1工程区管理 1) 新建工作区(1)点击菜单栏中的[工作区]-[新建]或者(Ctrl+N )。
工作区显示如下界面。
输入工作区名、标题后,点击[OK]按钮。
(2)工程编辑画面显示后,可设定工程名、通讯设定和离线机器人的设定,然后点击[OK]按钮。
(3)工程创建完毕。
工作区中会显示工程树,走位初始值,制成的[RC1]工程。
2)(3) 4) 5) 6)(1)离线部分离线部分显示电脑中的信息,即当前设定的机器人的机型和机器人的程序。
(2)在线部分在和控制器连接后,切换成在线状态时,或者模拟启动时显示,显示连接中的机器人型号和控制器等相关信息。
(3)备份显示从控制器备份过来的信息。
(4)Tool功能显示其它功能。
7)离线/在线/模拟在机器人离线编程软件中,工程的状态可分为离线、在线和模拟三种。
各个状态的含义和工程切换成在线模式,切换成模拟在线模式。
是在CR750-D/CRnD-700系列机器人控制器和GOT1000系列被在Ethernet连接的时候GOT通信]。
程序名②输入机器人程序名后,点击[OK]按钮,显示程序编辑画面。
③程序新建完成。
2)打开现有程序展开作为工程树的对象的工程的[离线]→[程序]。
所保存的程序会被显示在工程树中,然后双击需要进行编辑的程序。
3)打开控制器中的程序展开作为工程树的对象的项目的[在线]→[程序]。
所保存的程序会被显示在工程树中,然后双击需要编辑的程序。
画面显示,确认读出项目后,点击[OK]按钮。
4)程序指令的编辑使用MELFA-BASICV制作程序时,没有类似MELFA-BASICIV和MOVEMASTER指令的行号,左边显示STEP位置。
该STEP编号,可以通过键盘的[Enter]键自动显示。
根据相应指令的格式将程序指令编辑到步号后面的程序编辑区。
指令编辑区STEP编号直角型位置变量关节型位置变量5按钮。
6③[列表中选择传送源的程序名,并在右侧指定传送目标。
探析机器人离线编程软件的优势和功能及优缺点
我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
示教在线编程在实际应用中主要存在以下问题:
1、示教在线编程过程繁琐、效率低。
2、精度完全是靠示教者的目测决定,而且对于复杂的路径示教在线编程难以取得令人满意的效果。
与示教在线编程相比,离线编程又有什么优势呢?
1、减少机器人的停机时间,当对下一个任务进行编程时,机器人仍可在生产线上进行工作。
2、使编程者远离了危险的工作环境。
3、适用范围广,可对各种机器人进行编程,并能方便的实现优化编程。
4、可对复杂任务进行编程。
5、便于修改机器人程序。
下面详细介绍一下主流的离线编程软件。
1、Robot Master
Robotmaster来自加拿大,由上海傲卡自动化公司代理,是目前全球离线编程软件中顶尖的软件,几乎支持市场上绝大多数机器人品牌(KUKA,ABB,Fanuc,Motoman,史陶比尔、珂玛、三菱、DENSO、松下……),Robotmaster在Mastercam中无缝集成了机器人编程、仿真和代码生成功能,提高了机器人编程速度。
下图为Robot Master软件界面:
优点:
可以按照产品数模,生成程序,适用于切割、铣削、焊接、喷涂等等。
独家的优化功能,运动学规划和碰撞检测非常精确,支持外部轴(直线导轨系统、旋转系统),并支持复合外部轴组合系统。
缺点:。
离线编程软件简介离线编程软件简介一、引言1.1 背景随着技术的不断发展,离线编程软件成为控制的重要工具之一。
本文旨在介绍离线编程软件的基本概念、特点和使用方法,帮助用户更好地了解和应用离线编程软件。
1.2 目的本文旨在向用户介绍离线编程软件的相关知识,包括软件的功能、操作流程和常见问题解决方法,以便用户能够快速上手并有效使用该软件。
二、离线编程软件的基本概念2.1 离线编程软件定义离线编程软件是一种用于编写、调试和优化控制程序的工具。
与在线编程不同,离线编程软件可以在计算机上进行程序的编写和调试,将编写好的程序传输到控制器中执行。
2.2 离线编程软件的优势2.2.1 提高生产效率:离线编程软件可以减少停机时间,提高生产效率。
2.2.2 降低编程难度:通过离线编程软件,用户可以使用可视化界面进行编程,减少专业知识要求。
2.2.3 精确调试:离线编程软件可以帮助用户模拟的工作环境,进行精确的调试。
三、离线编程软件的功能3.1 编程语言支持离线编程软件通常支持多种编程语言,如G代码、RAPID语言等,用户可以根据实际需要选择合适的编程语言进行编程。
3.2 模拟离线编程软件可以模拟在工作环境中的动作,帮助用户预先检测并避免潜在的碰撞和错误。
3.3 路径规划离线编程软件可以帮助用户规划的运动轨迹,确保在实际操作过程中的安全性和稳定性。
3.4 编程调试离线编程软件提供丰富的调试工具,用户可以在软件中进行程序调试和错误修复,减少实际运行过程中的故障。
四、离线编程软件的使用方法4.1 环境搭建用户需要在计算机上安装离线编程软件,并与控制器进行连接。
4.2 创建项目用户需要在软件中创建一个项目,确定的型号和工作环境参数。
4.3 编写程序用户可以使用软件提供的编程语言进行程序的编写,包括运动控制、逻辑判断等操作。
4.4 模拟和调试用户可以在软件中模拟的运动过程,并进行调试和优化,确保程序的正确性。
4.5 程序传输用户可以将编写好的程序传输到控制器中,实现实际运行。