汽车常见四杆机构资料
- 格式:ppt
- 大小:1.71 MB
- 文档页数:12
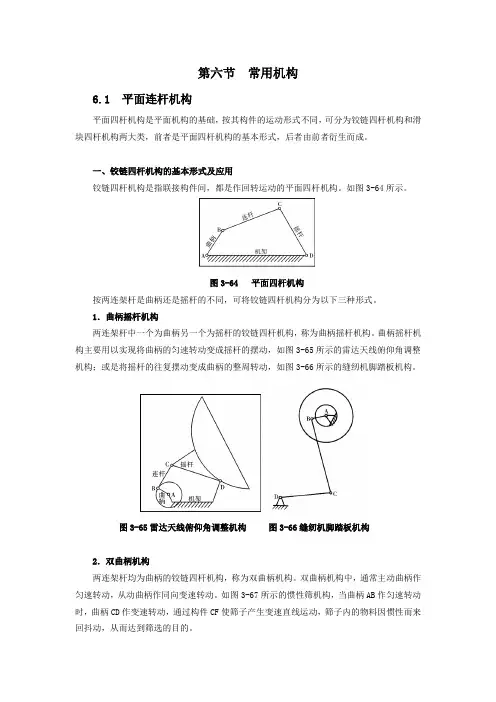
第六节常用机构6.1 平面连杆机构平面四杆机构是平面机构的基础,按其构件的运动形式不同,可分为铰链四杆机构和滑块四杆机构两大类,前者是平面四杆机构的基本形式,后者由前者衍生而成。
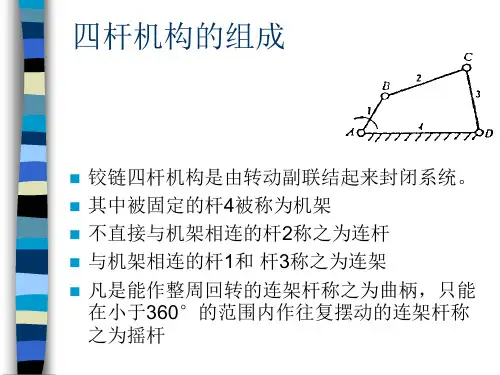
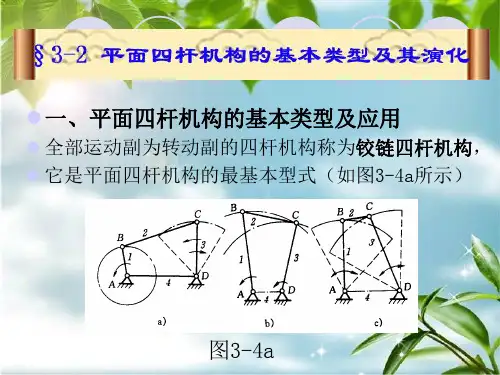
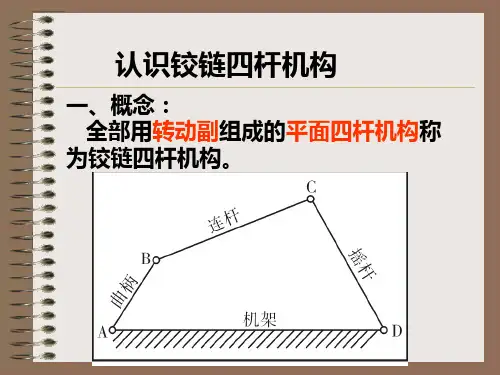
一、铰链四杆机构的基本形式及应用铰链四杆机构是指联接构件间,都是作回转运动的平面四杆机构。
如图3-64所示。
图3-64 平面四杆机构按两连架杆是曲柄还是摇杆的不同,可将铰链四杆机构分为以下三种形式。
1.曲柄摇杆机构两连架杆中一个为曲柄另一个为摇杆的铰链四杆机构,称为曲柄摇杆机构。
曲柄摇杆机构主要用以实现将曲柄的匀速转动变成摇杆的摆动,如图3-65所示的雷达天线俯仰角调整机构;或是将摇杆的往复摆动变成曲柄的整周转动,如图3-66所示的缝纫机脚踏板机构。
图3-65雷达天线俯仰角调整机构图3-66缝纫机脚踏板机构2.双曲柄机构两连架杆均为曲柄的铰链四杆机构,称为双曲柄机构。
双曲柄机构中,通常主动曲柄作匀速转动,从动曲柄作同向变速转动。
如图3-67所示的惯性筛机构,当曲柄AB作匀速转动时,曲柄CD作变速转动,通过构件CF使筛子产生变速直线运动,筛子内的物料因惯性而来回抖动,从而达到筛选的目的。
图3-67 惯性筛机构在双曲柄机构中,若相对的两杆长度分别相等,则称为平行四边形机构。
它有如图3-68a 所示的正平行双曲柄机构和如图3-68b所示的反平行双曲柄机构两种形式。
前者的运动特点是两曲柄的转向相同且角速度相等,连杆作平动;后者的运动特点是两曲柄的转向相反且角速度不等。
图3-68 平行双曲柄机构图3-69所示的机车驱动轮联动机构是正平行双曲柄机构的应用实例。
图3-70所示为车门启闭机构,是反平行双曲柄机构的一个应用,它使两扇车门朝相反的方向转动,从而保证两扇门能同时开启或关闭。
在正平行双曲柄机构中,当各构件共线时,可能出现从动曲柄与主动曲柄转向相反的现象,即运动不梯形;当汽车转弯时,两摇杆摆过不同的角度,使两前轮转动轴线汇交于后轮轴线上的O点,以确保车辆转弯的每一瞬时,四个轮子与地面之间均绕O点作纯滚动。

四杆机构的名词解释四杆机构是一种常见的机械装置,也被称为四边杆机构。
它由四个连杆组成,这些连杆通过铰链连接在一起,形成一个闭合的结构。
四杆机构广泛应用于各种工程领域,如机械设计、机器人技术和汽车工业等。
本文将围绕四杆机构的定义、功能和应用展开讨论,并简要介绍一些常见的四杆机构类型。
首先,让我们来详细解释一下四杆机构的构成和原理。
四杆机构由四个连杆组成,这些连杆通过铰链连接在一起,形成一个闭合的结构。
其中,两个连杆位于机构的两侧,并且通常是较短的,被称为短连杆。
另外两个连杆则位于机构的上下,通常较长,被称为长连杆。
这种结构使得四杆机构能够实现一定的运动自由度。
四杆机构的运动可以通过其连杆的长度和关节位置来控制。
通过调整这些参数,可以使机构产生不同的运动轨迹和速度。
例如,如果将长连杆的两个端点连接到短连杆的中点,就可以实现一种简单的摇杆机构,其运动轨迹为直线。
而当连杆的长度不同或关节位置发生改变时,四杆机构的运动形态也会发生变化,从而实现不同的功能。
四杆机构的功能非常多样。
首先,它可以用作转换运动的装置。
通过将输入的旋转运动转换为线性运动或者是相反,四杆机构可以用来实现各种机械操作。
例如,在发动机的曲轴连杆机构中,旋转的曲轴运动被转换为活塞的直线运动,从而驱动汽缸内的燃烧过程。
此外,四杆机构还可以用于改变运动方向。
通过适当设计连杆长度和关节位置,可以将旋转运动的输入转换为与之垂直或斜交的输出运动。
除了上述的基本功能,四杆机构还可以实现更复杂的功能。
例如,通过引入额外的关节和驱动装置,可以实现四杆机构的控制。
这种控制可以用于精确定位和运动轨迹规划。
在机器人技术中,四杆机构常被用来设计并控制机器人的动作,实现精确的位置和姿态调节。
在实际应用中,四杆机构有多种类型。
最简单和最常见的是二十杆(二杆四件)机构。
它由两个长连杆和两个短连杆组成,形成一个封闭的矩形或平行四边形。
此外,还有更复杂的四杆机构类型,如六杆机构、双曲四杆机构等。
铰链四杆机构名词解释铰链四杆机构是汽车行业的一种技术,常被用来改进汽车的弹性性能。
其原理是利用四杆机构的自由度,来消除支撑系统在转向和行驶过程中的动摇。
四杆机构的机构构成十分复杂,其中包括四个主铰链、四个附铰链、八个杆件以及六个球节点。
主铰链由四条铰链构成,它们用来连接车轮与车架,一侧的四条铰链包含两个连接车轮的主铰链,另一侧的四条铰链则包含两个连接车架的主铰链。
每条铰链都有四个球节点,它们与活塞形成紧凑的机构。
附铰链由四条铰链构成,它们用来将车轮与车架相连,其中一侧包含两个连接车轮的附铰链,另一侧包含两个连接车架的附铰链。
它们由上、左、右、前、后各两条连接成一个总体,具有良好的弹性性能。
八个杆件是构成四杆机构的核心部分,包括车架上的顶部杆件、底部杆件、维护杆件以及前部杆件,以及车轮上的顶部杆件、底部杆件、维护杆件以及前部杆件。
它们的结构与主铰链和附铰链配合,构成四杆机构的动态支撑系统。
六个球节点是构成四杆机构的关键部分,每条铰链上都有两个球节点,它们与活塞形成紧凑的机构。
球节点的工作机制是:车轮和车架的运动过程中,一个球节点会被拉伸,另一个球节点则会受到压缩,从而有效地维持车轮和车架的运动状态。
四杆机构的主要作用是缓冲车轮的震动,它是由主铰链、附铰链、杆件以及球节点组成的紧凑机构,在转向和行驶过程中,可以有效地消除路面所带来的震动,使车辆行驶更加舒适。
此外,四杆机构还可以增强转向系统的整体强度,提高行车的安全性和平稳性,确保车辆的行驶的平稳可靠。
总之,铰链四杆机构是一种改善汽车行驶弹性性能的有效技术,由主铰链、附铰链、八个杆件以及六个球节点构成,其原理是利用四杆机构的自由度,来消除支撑系统在转向和行驶过程中的动摇,同时提高车辆行驶的平稳可靠性。
铰链四杆机构的特点
1 四杆机构
四杆机构,又称为四自由度机构,是指由四根坐标轴的机构。
它
由三个关节及一个铰链组成,其中两个关节通过铰链串在一起,构成
一个四杆机构。
四杆机构多用于汽车制动系统,液压传动装置,倒车
影像系统等。
2 四杆机构的主要特点
1. 全自由度机构:四杆机构是一种具有四个自由度(两个平面和
一个转动角度)的机构,可以实现多种运动,例如旋转、移动、延伸等。
2.紧凑轻巧:由于采用四根坐标轴,四杆机构结构紧凑轻便,占
用空间小,有效提高产品性能。
3.可靠性高:四杆机构通过安装特殊的密封圈和止动器,可以抵
抗腐蚀介质的冲击,动态响应稳定,使得机构可以长时间工作。
4.使用方便:四杆机构可以通过轴承和齿轮进行传动和传递运动,操作方便,可以很好的满足实际需求。
3 应用
四杆机构广泛用于汽车制动系统,液压传动装置,航空设备,搅
拌机,起重机等机械设备,是工业领域中一种重要的运动机构。
四杆机构具有自由度高,可靠性高,结构紧凑,占用空间小,维护方便等特点,可以实现多种复杂运动,因此在工业机器人中广泛应用。
严格按照产品质量要求制作成品,保证机构性能和可靠性,以满足工况要求,提高测量效率,使实际化学加工过程更加安全、高效。