汽车常见四杆机构
- 格式:pptx
- 大小:3.53 MB
- 文档页数:66

举例说明铰链四杆机构的应用
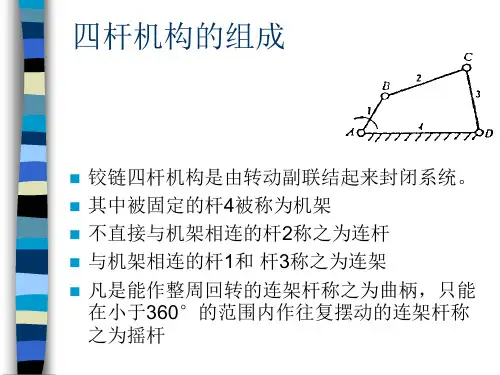
铰链四杆机构是一种常见的机械结构,它由四个连杆和若干个铰链连接而成。
这种结构常用于机械设备和工业机器人等领域,下面以几个具体的例子来说明其应用。
1. 汽车车门
汽车车门通常采用铰链四杆机构来实现打开和关闭。
在车门的上、下、前、后四个角落分别安装一个铰链四杆机构,通过机构的运动,车门可以实现向内、向外打开和关闭的功能。
2. 工业机器人
工业机器人通常需要进行各种精细的运动控制,铰链四杆机构在这方面具有较高的精度和可靠性。
例如,在焊接机器人中,铰链四杆机构可以实现焊枪的精准控制,从而保证焊接的质量和效率。
3. 飞机起落架
飞机起落架也是一个重要的应用领域。
由于飞行过程中需要经历各种复杂的环境和振动,所以起落架的设计需要考虑到安全、结构合理和可靠性等因素。
铰链四
杆机构的结构简单,重量轻,可以满足这些要求。
总之,铰链四杆机构是一种结构简单、可靠性较高的机械结构,广泛应用于各种机械设备和工业机器人中。

温馨小提示:本文主要介绍的是关于四杆机构的设计步骤和方法的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇四杆机构的设计步骤和方法能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)阅读本篇文章之前,本店铺提供大纲预览服务,我们可以先预览文章的大纲部分,快速了解本篇的主体内容,然后根据您的需求进行文档的查看与下载。
四杆机构的设计步骤和方法(大纲)一、四杆机构概述1.1四杆机构简介1.2四杆机构的应用领域二、四杆机构设计步骤2.1确定设计目标2.2分析四杆机构类型2.3确定机构参数2.4选择合适的材料2.5计算运动与动力参数2.6进行仿真分析与优化三、四杆机构设计方法3.1几何法3.1.1尺度法3.1.2位置法3.2解析法3.2.1矩阵法3.2.2微分方程法3.3计算机辅助设计方法3.3.1CAD软件3.3.2仿真软件四、四杆机构设计实例4.1曲柄摇杆机构设计实例4.2双曲柄机构设计实例4.3双摇杆机构设计实例五、四杆机构设计注意事项5.1运动副间隙的考虑5.2刚度与强度的校核5.3疲劳寿命分析5.4安全系数的选择六、四杆机构设计总结与展望6.1设计成果总结6.2存在问题与改进方向6.3未来发展趋势与应用前景一、四杆机构概述以下是对四杆机构设计步骤和方法中的四杆机构概述部分的撰写:1.1 四杆机构简介四杆机构是由四个杆件组成的机械系统,它们通过关节连接在一起。
这四个杆件分别是:曲柄、连杆、摇杆和机架。
四杆机构根据其结构特点和运动特性,可以分为多种类型,如直动四杆机构、摆动四杆机构、转动四杆机构等。
四杆机构在工程应用中具有广泛的应用前景,其设计和研究在机械工程领域具有重要意义。
铰链四杆机构类型的判定1. 什么是铰链四杆机构?铰链四杆机构是一种常见的机械传动装置,由四个连杆通过铰链连接而成。
它主要用于将旋转运动转化为直线运动或者将直线运动转化为旋转运动。
铰链四杆机构由以下几个部分组成:•固定基座:提供支撑和固定机构的作用。
•两个连接杆:连接在基座上,通过铰链与其他连杆相连。
•输入连杆:通过铰链与基座和输出连杆相连。
•输出连杆:通过铰链与输入连杆相连,完成运动转换。
2. 铰链四杆机构的分类根据铰链四杆机构的结构和特点,可以将其分为以下三种类型:(1)平面平行四杆机构平面平行四杆机构中,输入连杆和输出连杆均为平行,并且位于同一平面上。
这种机构常用于需要保持物体水平移动的场合。
汽车后轮悬挂系统中的独立悬挂就是一种典型的平面平行四杆机构。
(2)空间平行四杆机构空间平行四杆机构与平面平行四杆机构相比,多了一个维度的自由度,可以在三维空间内进行运动。
输入连杆和输出连杆仍然是平行的,但它们不再位于同一平面上。
这种机构常用于需要进行复杂直线运动的场合。
(3)球面四杆机构球面四杆机构中,输入连杆和输出连杆不再是平行的,而是相交于一个固定点。
这种机构常用于需要将旋转运动转化为其他运动形式的场合。
汽车发动机中的曲轴连杆机构就是一种典型的球面四杆机构。
3. 铰链四杆机构类型的判定方法判定铰链四杆机构的类型可以通过以下步骤进行:(1)确定基座和铰链根据实际情况确定基座和铰链的位置。
基座通常是固定不动的,而铰链则连接各个连杆以实现运动传递。
(2)绘制连杆图根据已知信息,在纸上绘制出各个连杆的位置和长度。
可以使用CAD软件或者手工绘制。
(3)确定输入连杆和输出连杆根据机构的功能需求,确定哪根连杆是输入连杆,哪根连杆是输出连杆。
输入连杆通常与动力源相连,输出连杆则负责传递运动。
(4)判断平行关系通过观察绘制的连杆图,判断输入连杆和输出连杆是否平行。
如果它们平行且位于同一平面上,则为平面平行四杆机构;如果它们平行但不在同一平面上,则为空间平行四杆机构。
平面铰链四杆机构分类一、引言平面铰链四杆机构是一种常见的机械传动结构,由四个杆件通过铰链连接而成。
它具有简单、可靠、刚性好等优点,在机械领域有着广泛的应用。
本文将对平面铰链四杆机构进行分类和分析,以期更好地了解和应用这一机构。
二、分类平面铰链四杆机构可以根据其杆件的链接关系和机构的运动方式进行分类。
2.1 根据杆件链接关系分类•对称四杆机构:四个杆件两两对称连接,形成一个对称的结构。
常见的具有对称结构的平面铰链四杆机构有平行四杆机构和梯形四杆机构。
•非对称四杆机构:四个杆件之间没有对称关系,形成一个非对称的结构。
常见的非对称平面铰链四杆机构有双曲线四杆机构和椭圆四杆机构。
2.2 根据机构的运动方式分类•旋转运动四杆机构:机构中至少有一个连杆可以绕铰链进行旋转运动。
例如,摇杆机构和滑块机构都属于旋转运动四杆机构。
•平动运动四杆机构:杆件只能以平动的方式运动,不能绕铰链进行旋转运动。
典型的平动运动四杆机构有单滑块机构和双滑块机构。
三、对称四杆机构3.1 平行四杆机构四杆机构中的两个杆件平行于彼此,并且与另外两个杆件相互垂直。
平行四杆机构有两组平行链接的杆件,因此具有对称的结构。
其机构特点是:•杆件a和b平行,杆件c和d平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
3.2 梯形四杆机构四杆机构中的两个杆件不平行,而是呈现出梯形的形状。
梯形四杆机构同样具有对称结构,其机构特点是:•杆件a和b不平行,杆件c和d不平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
四、非对称四杆机构4.1 双曲线四杆机构四杆机构中的杆件连接形成一个双曲线的形状,因此称为双曲线四杆机构。
其机构特点是:•杆件a和b彼此相交,杆件c和d彼此相交;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
4.2 椭圆四杆机构四杆机构中的杆件连接形成一个椭圆的形状,因此称为椭圆四杆机构。
四连杆机构原理四连杆机构是一种常用的机械传动装置,它由四个连杆组成,能够实现复杂的运动轨迹和机械动作。
四连杆机构广泛应用于各种机械设备中,如发动机、机械臂、汽车悬挂系统等。
在本文中,我们将深入探讨四连杆机构的原理及其工作原理。
首先,让我们来了解四连杆机构的结构。
四连杆机构由四个连杆组成,分别是主动连杆、从动连杆和两个曲柄连杆。
主动连杆和从动连杆通过曲柄连杆连接在一起,形成一个闭合的连杆链条。
曲柄连杆通过曲柄轴与主动连杆和从动连杆连接,使得整个机构能够实现旋转和直线运动。
四连杆机构的工作原理是基于连杆的几何关系和运动学原理。
当曲柄轴旋转时,曲柄连杆会带动主动连杆和从动连杆进行相对运动。
通过合理设计连杆的长度和位置,可以实现不同的运动轨迹和机械动作。
例如,可以通过四连杆机构实现直线运动、往复运动、转动运动等多种运动形式。
四连杆机构的运动轨迹是一个复杂的曲线,它可以通过几何分析和运动学原理来进行描述。
在设计四连杆机构时,需要考虑各个连杆的长度、角度和位置关系,以及曲柄轴的旋转速度和方向。
通过合理的设计和计算,可以实现所需的运动轨迹和机械动作。
除了运动轨迹的设计,四连杆机构还需要考虑其工作稳定性和传动效率。
稳定性是指在运动过程中,连杆不会发生过大的振动和变形,保证机构能够正常工作。
传动效率是指机构在能量传递过程中的损耗情况,需要通过合理的设计和选择材料来提高传动效率。
总的来说,四连杆机构是一种重要的机械传动装置,它能够实现复杂的运动轨迹和机械动作。
通过合理的设计和计算,可以实现所需的运动形式和工作效果。
在实际的机械设计中,四连杆机构有着广泛的应用前景,可以满足各种机械设备的需求。
综上所述,四连杆机构的原理和工作原理是基于连杆的几何关系和运动学原理,通过合理的设计和计算,可以实现所需的运动轨迹和机械动作。
在实际的机械设计中,四连杆机构有着广泛的应用前景,能够满足各种机械设备的需求。
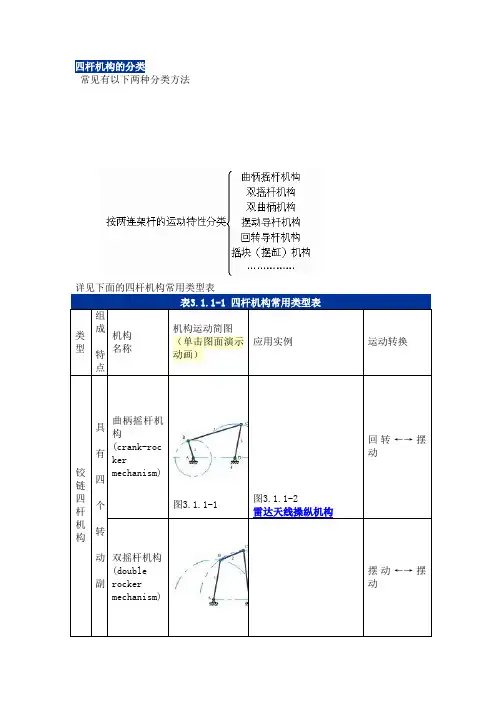
四杆机构的分类常见有以下两种分类方法详见下面的四杆机构常用类型表表3.1.1-1 四杆机构常用类型表类型组成特点机构名称机构运动简图(单击图面演示动画)应用实例运动转换铰链四杆机构具有四个转动副曲柄摇杆机构(crank-rockermechanism)图3.1.1-1图3.1.1-2雷达天线操纵机构回转←→摆动双摇杆机构(doublerockermechanism)摆动←→摆动图3.1.1-3 图3.1.1-4港口起重机械双曲柄机构(doublecrankmechanism)图3.1.1-5 图3.1.1-6惯性筛传动机构回转←→回转平行四杆机构(parallel ogrammechanism)图3.1.1-7 图3.1.1-8铲斗提升机构回转←→回转摆动←→摆动曲柄滑块机构具有一个固定导路的移动对心曲柄滑块机构(generalslider-crankmechanism)图3.1.1-9图3.1.1-11内燃机、压缩机、冲床等回转←→移动偏置曲柄滑块机构(offsetslider-crankmechanism)图3.1.1-10副导杆机构具有一个运动导路的移动副摆动导杆机构(swingshapermechanism)图3.1.1-12图3.1.1-13牛头刨床主体机构回转←→摆动回转导杆机构(rotatingshapermechanism)图3.1.1-14图3.1.1-15小型刨床主体机构回转←→回转摇块机构图3.1.1-16图3.1.1-17自卸汽车卸料机构移动←→摆动移动导杆机构(movingshapermechanism)图3.1.1-18图3.1.1-19摆动←→移动手压抽水机双滑块机构具有两个移动副正弦机构(sinegenerator)图3.1.1-20图3.1.1-21压缩机回转←→移动s=rsinϕ正切机构(tangentmechanism)图3.1.1-22图3.1.1-23手柄操作机构摆动←→移动s=htgϕ双滑块机构(doubleslidermechanism)图3.1.1-24图3.1.1-25椭圆仪移动←→移动双转块机构(dedhamcouplingmechanism)图3.1.1-26图3.1.1-27十字滑块联轴节。

铰链四杆机构名词解释铰链四杆机构是汽车行业的一种技术,常被用来改进汽车的弹性性能。
其原理是利用四杆机构的自由度,来消除支撑系统在转向和行驶过程中的动摇。
四杆机构的机构构成十分复杂,其中包括四个主铰链、四个附铰链、八个杆件以及六个球节点。
主铰链由四条铰链构成,它们用来连接车轮与车架,一侧的四条铰链包含两个连接车轮的主铰链,另一侧的四条铰链则包含两个连接车架的主铰链。
每条铰链都有四个球节点,它们与活塞形成紧凑的机构。
附铰链由四条铰链构成,它们用来将车轮与车架相连,其中一侧包含两个连接车轮的附铰链,另一侧包含两个连接车架的附铰链。
它们由上、左、右、前、后各两条连接成一个总体,具有良好的弹性性能。
八个杆件是构成四杆机构的核心部分,包括车架上的顶部杆件、底部杆件、维护杆件以及前部杆件,以及车轮上的顶部杆件、底部杆件、维护杆件以及前部杆件。
它们的结构与主铰链和附铰链配合,构成四杆机构的动态支撑系统。
六个球节点是构成四杆机构的关键部分,每条铰链上都有两个球节点,它们与活塞形成紧凑的机构。
球节点的工作机制是:车轮和车架的运动过程中,一个球节点会被拉伸,另一个球节点则会受到压缩,从而有效地维持车轮和车架的运动状态。
四杆机构的主要作用是缓冲车轮的震动,它是由主铰链、附铰链、杆件以及球节点组成的紧凑机构,在转向和行驶过程中,可以有效地消除路面所带来的震动,使车辆行驶更加舒适。
此外,四杆机构还可以增强转向系统的整体强度,提高行车的安全性和平稳性,确保车辆的行驶的平稳可靠。
总之,铰链四杆机构是一种改善汽车行驶弹性性能的有效技术,由主铰链、附铰链、八个杆件以及六个球节点构成,其原理是利用四杆机构的自由度,来消除支撑系统在转向和行驶过程中的动摇,同时提高车辆行驶的平稳可靠性。
铰链四杆机构的特点
1 四杆机构
四杆机构,又称为四自由度机构,是指由四根坐标轴的机构。
它
由三个关节及一个铰链组成,其中两个关节通过铰链串在一起,构成
一个四杆机构。
四杆机构多用于汽车制动系统,液压传动装置,倒车
影像系统等。
2 四杆机构的主要特点
1. 全自由度机构:四杆机构是一种具有四个自由度(两个平面和
一个转动角度)的机构,可以实现多种运动,例如旋转、移动、延伸等。
2.紧凑轻巧:由于采用四根坐标轴,四杆机构结构紧凑轻便,占
用空间小,有效提高产品性能。
3.可靠性高:四杆机构通过安装特殊的密封圈和止动器,可以抵
抗腐蚀介质的冲击,动态响应稳定,使得机构可以长时间工作。
4.使用方便:四杆机构可以通过轴承和齿轮进行传动和传递运动,操作方便,可以很好的满足实际需求。
3 应用
四杆机构广泛用于汽车制动系统,液压传动装置,航空设备,搅
拌机,起重机等机械设备,是工业领域中一种重要的运动机构。
四杆机构具有自由度高,可靠性高,结构紧凑,占用空间小,维护方便等特点,可以实现多种复杂运动,因此在工业机器人中广泛应用。
严格按照产品质量要求制作成品,保证机构性能和可靠性,以满足工况要求,提高测量效率,使实际化学加工过程更加安全、高效。